The Vibe of Skating; Design and Testing of a Vibro-Tactile Feedback System †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
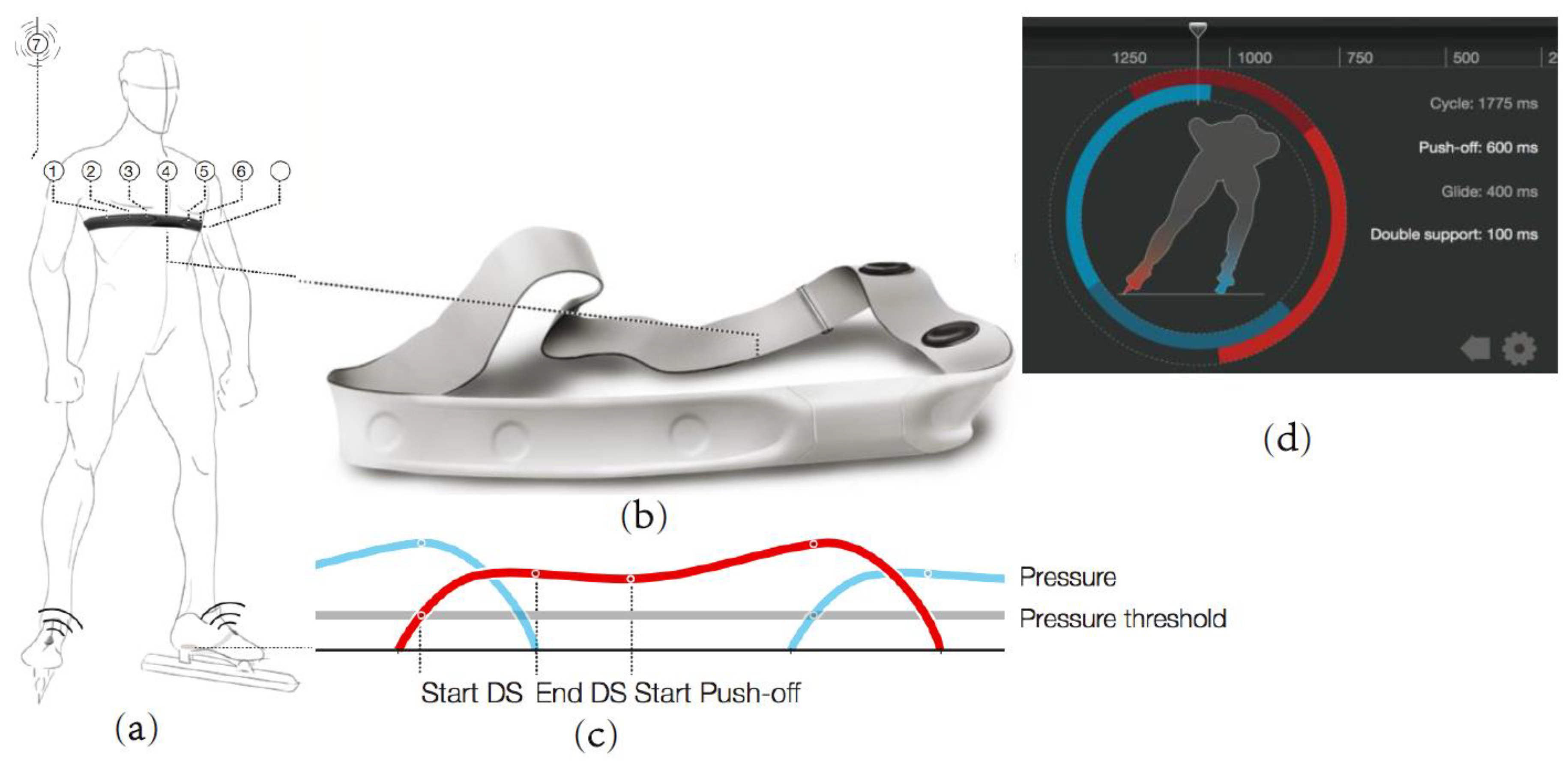
2. Phases in the Skating Stroke
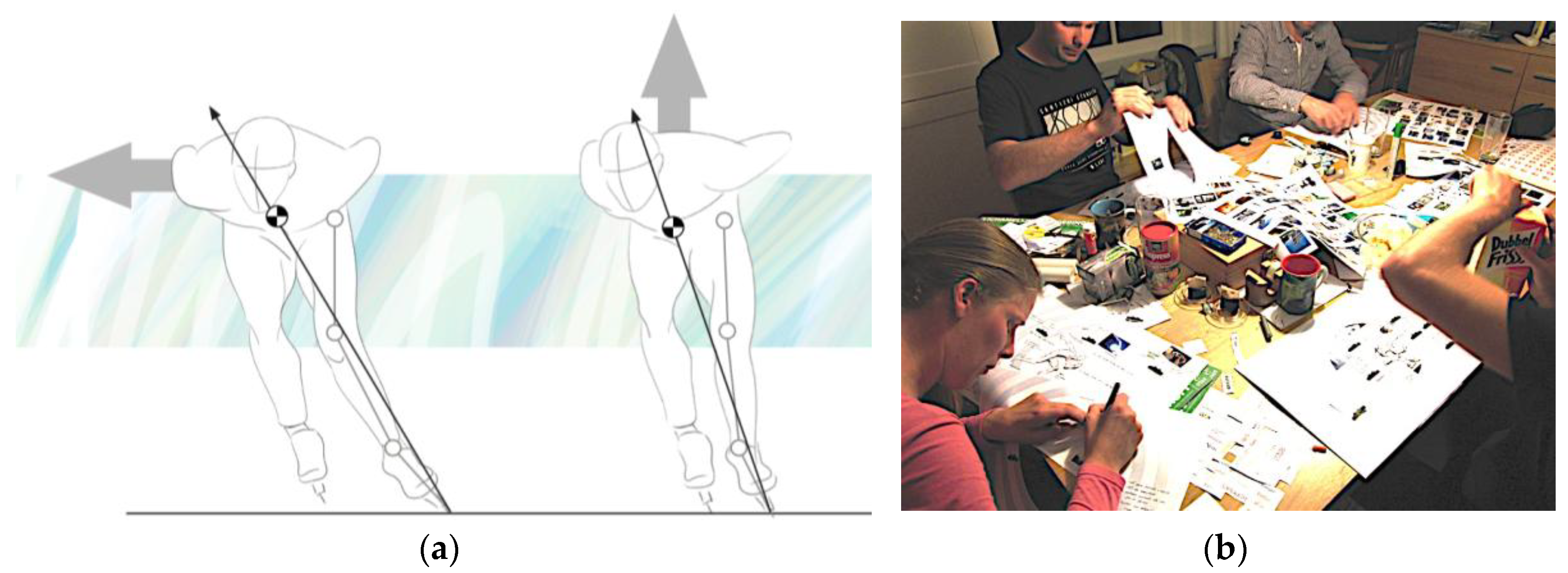
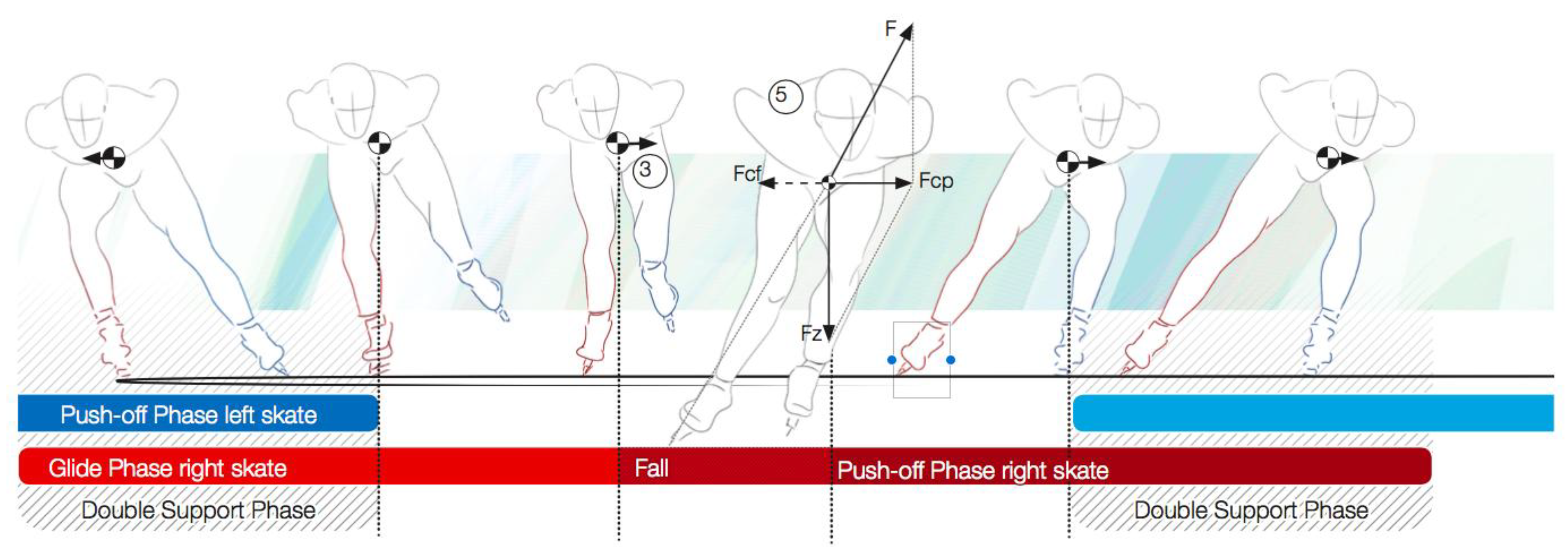
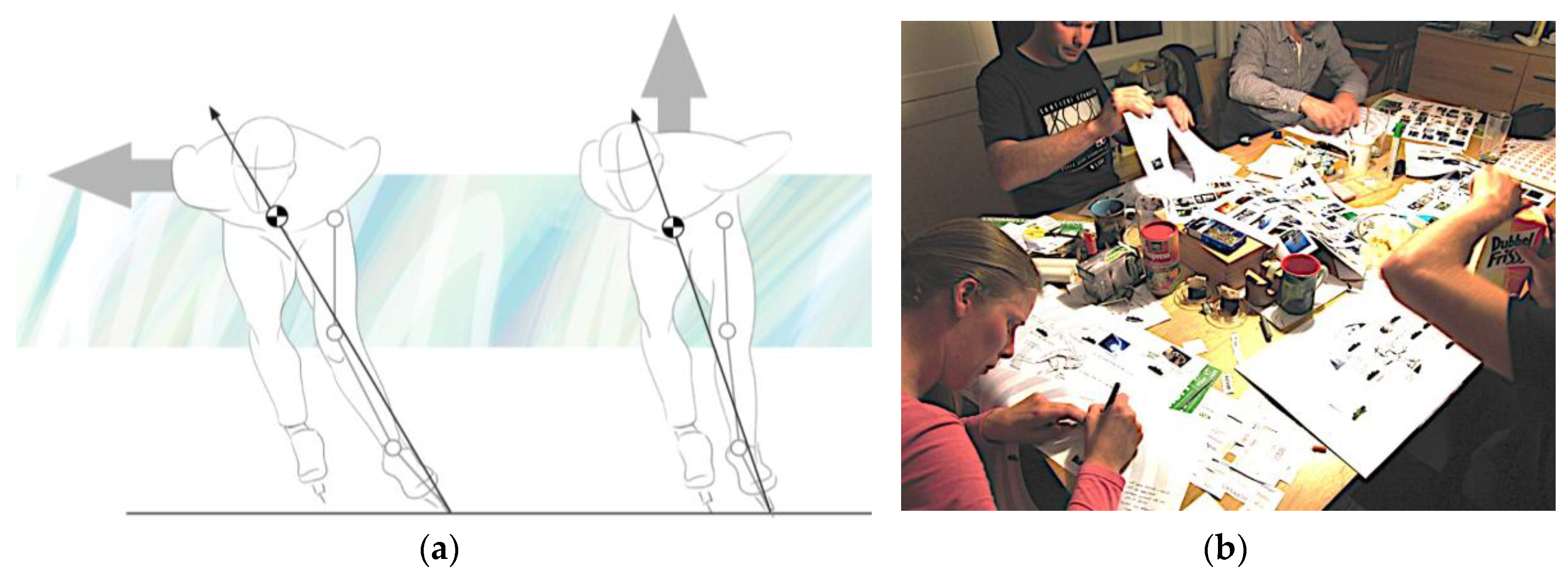
- A longer push-off at one skate elicits a longer fall. A longer fall decreases the angle between the skate and the ice and therefore enables the skater to push-off more sideways instead of pushing up; i.e., the vertical component of the muscular force becomes smaller at increased angles (see Figure 2). The vertical force component creates a vertical displacement of the centre of mass (COM), therefore using the muscular work less efficient.
- Shortening the double support phase makes the skating motion more efficient; the skaters mass is longer supported by one single skate, allowing him to push of harder. Shortening this phase can be achieved by positioning the skate later onto the ice, resulting in a longer fall.
- A longer fall also results in a smaller knee angle of the new gliding skate. Reducing the knee angle helps the skater to reduce aerodynamic drag (reduction of frontal area), lower the COM and increase the work per stroke.
3. The Target Group
4. Providing Feedback to the User
5. The Design Process: From Design Goal to User Test
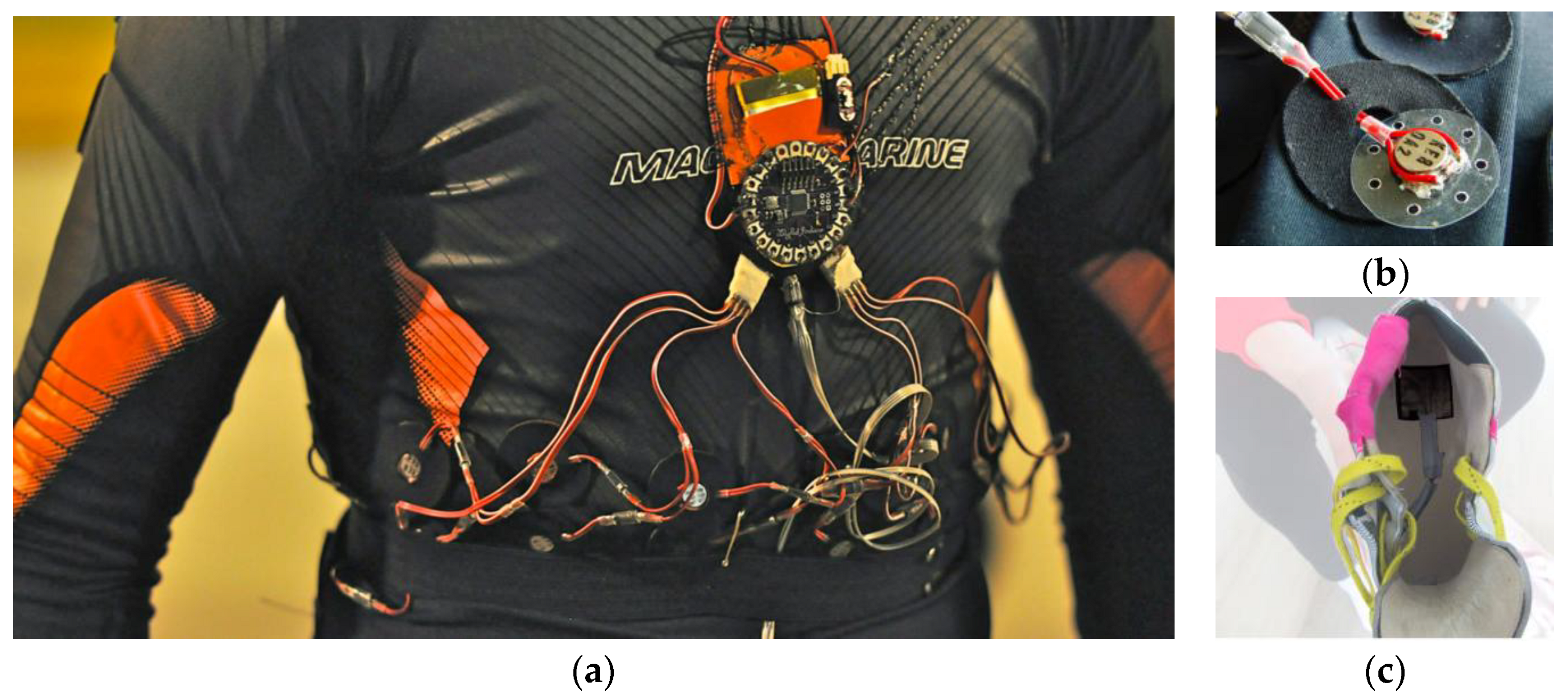
5.1. Prototype and User Test
5.2. Results
6. Final Design Proposal
7. Conclusion and Discussion
Acknowledgments
Conflicts of Interest
References
- Boer, R.W. de; Ettema, G.J.C.; van Gorkum, H.; de Groot, G.; van Ingen Schenau, G.J. A geometrical model of speed skating the curves. J. Biomech. 1988, 21, 445–450. [Google Scholar] [CrossRef]
- Bilodeau, E.A.; Bilodeau, I.M. Motor-skills learning. Ann. Rev. Psychol. 1961, 12, 243–280. [Google Scholar] [CrossRef]
- Fintelman, D.M.; den Braver, O.; Schwab, A.L. A simple 2-dimensional model of speed skating which mimics observed forces and motions. In Proceedings of the Multibody Dynamics 2011, ECCOMAS Thematic Conference, Brussels, Belgium, 4–7 July 2011. [Google Scholar]
- Stappers, P.J.; Sleeswijk Visser, F. Bringing participatory design techniques to industrial design engineers. In Proceedings of the Engineering and Product Design Education Conference, NewCastle, UK, 13–17 September 2007; pp. 117–122. [Google Scholar]
- Mistry, P.; Maes, P. SixthSense: A wearable gestural interface. In Proceedings of the SIGGRAPH ASIA ’09 ACM SIGGRAPH ASIA 2009 Sketches, Yokohama, Japan, 16–19 December 2009. [Google Scholar]
- Money, K. Theory Underlying the Peripheral Vision Horizon Device; DTIC: Fort Belvoir, VA, USA, 1982. [Google Scholar]
- Leibowitz, H.; Dichgans, J. The Ambient Visual System and Spatial Orientation. Spatial Disorientation in Flight: Current Problems; AGARD CP-287; Perdriel, G., Benson, A.J., Eds.; Technical Editing and Reproduction Ltd.: London, UK, 1980. [Google Scholar]
- Schaffert, N.; Mattes, K.; Effenberg, A. A sound design for acoustic feedback in elite sports. In Auditory Display; Springer: Berlin/Heidelberg, Germany, 2010; pp. 143–165. [Google Scholar]
- Takahata, M.; Shiraki, K.; Sakane, Y.; Takebayashi, Y. Sound feedback for powerful karate training. In Proceedings of the 2004 Conference on New Interfaces for Musical Expression, Shizuoka, Japan, 3–5 June 2004. [Google Scholar]
- Pijnappel, S. 2012. Available online: http://sebastiaanpijnappel.com/wearable-coach/ (accessed on 11 October 2017).
- Godbout, A.; Boyd, J.E. Corrective sonic feedback for speed skating: A case study. In Proceedings of the International Conference on Auditory Display, Washington, DC, USA, 9–15 June 2010. [Google Scholar]
- Geldard, F.A. Some neglected possibilities of communication. Science 1960, 131, 1583–1588. [Google Scholar] [CrossRef] [PubMed]
- Van Erp, J.B.F.; Saturday, I.; Jansen, C. Application of tactile displays in sports: Where to, how and when to move. In Proceedings of the Conference on EuroHaptics, Paris, France, 3–6 July 2006. [Google Scholar]
- Spelmezan, D.; Jacobs, M.; Hilgers, A.; Borchers, J. Tactile motion instructions for physical activities. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Boston, MA, USA, 4–9 April 2009. [Google Scholar]
- Watanabe, J.; Ando, H. Pace-sync shoes: Intuitive walking-pace guidance based on cyclic vibro-tactile stimulation for the foot. Virtual Real. 2010, 14, 213–219. [Google Scholar] [CrossRef]
- Erp, V.; Jan, B. Tactile Torso Display as Countermeasure to Reduce Night Vision Goggles Induced Drift; DTIC: Fort Belvoir, VA, USA, 2003. [Google Scholar]
- Hale, K.S.; Stanney, K.M. Deriving haptic design guidelines from human physiological, psychophysical, and neurological foundations. IEEE Comput. Graph. Appl. 2004, 24, 33–39. [Google Scholar] [CrossRef] [PubMed]
- Van Veen, H.; van Erp, J. Tactile information presentation in the cockpit. In Haptic Human-Computer Interaction; Springer: Berlin, Germany, 2001; pp. 174–181. [Google Scholar]
- Geldard, F.A.; Sherrick, C.E. The Cutaneous “Rabbit”: A Perceptual Illusion. Science 1972, 178, 178–179. [Google Scholar] [CrossRef] [PubMed]
- Buijs, J.A. The Delft Innovation Method; Den Haag, Eleven International Publishing: Portland, OR, USA, 2012. [Google Scholar]
- Koskinen, I.; Mikkonen, J.; Eckoldt, K.; Hänninen, R.; Jiang, J.; Schultz, B.; Battarbee, K.; Suri, J.F. Protosketching: Sketching in Experience Prototyping. 2009. Available online: http://www2.uiah.fi/~ikoskine/recentpapers/submissions08/protosketching-submission-not-anon.pdf (accessed on 11 October 2017).
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jansen, A.J.; Dekker, M.; Steen, D.v.d. The Vibe of Skating; Design and Testing of a Vibro-Tactile Feedback System. Proceedings 2018, 2, 296. https://doi.org/10.3390/proceedings2060296
Jansen AJ, Dekker M, Steen Dvd. The Vibe of Skating; Design and Testing of a Vibro-Tactile Feedback System. Proceedings. 2018; 2(6):296. https://doi.org/10.3390/proceedings2060296
Chicago/Turabian StyleJansen, Arjen J., Marijke Dekker, and Diederik van der Steen. 2018. "The Vibe of Skating; Design and Testing of a Vibro-Tactile Feedback System" Proceedings 2, no. 6: 296. https://doi.org/10.3390/proceedings2060296
APA StyleJansen, A. J., Dekker, M., & Steen, D. v. d. (2018). The Vibe of Skating; Design and Testing of a Vibro-Tactile Feedback System. Proceedings, 2(6), 296. https://doi.org/10.3390/proceedings2060296