Computational Topology to Monitor Human Occupancy †





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
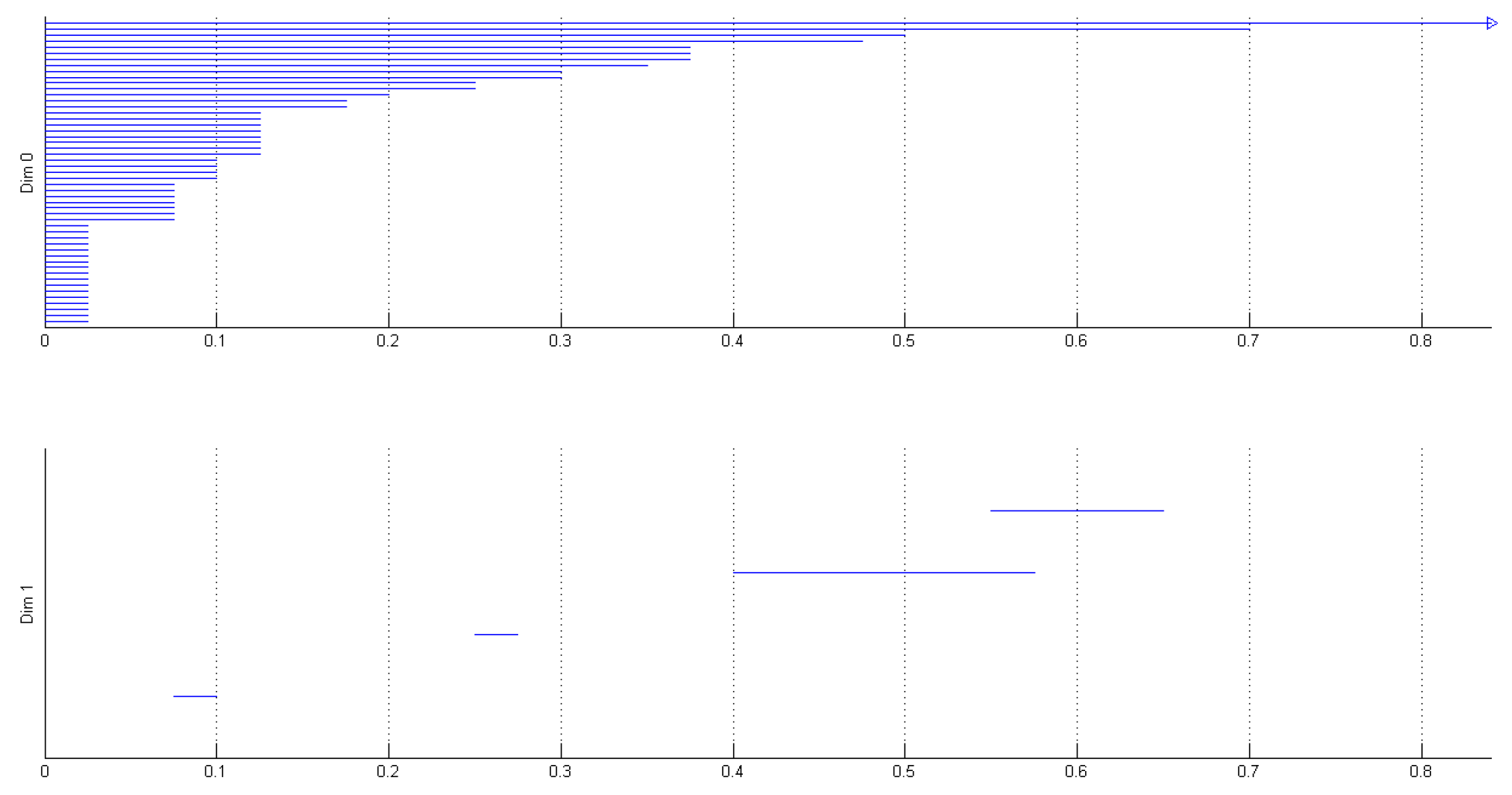
2. Topological Data Analysis
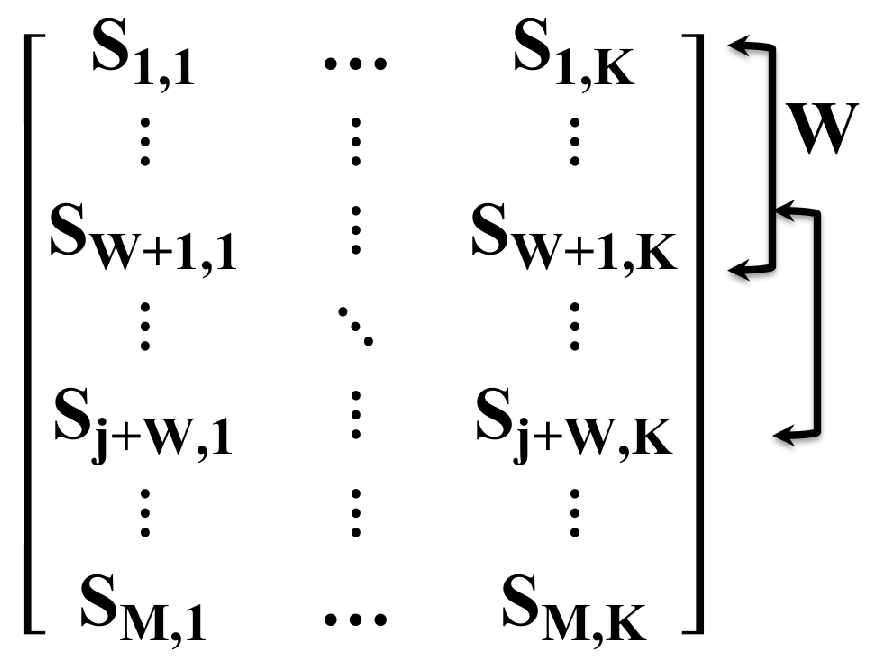
3. Feature Extraction Algorithm
| Algorithm 1 PH-based Algorithm for Feature Extraction. |
|
4. Experiments
4.1. Experimental Set-Up
4.2. Results
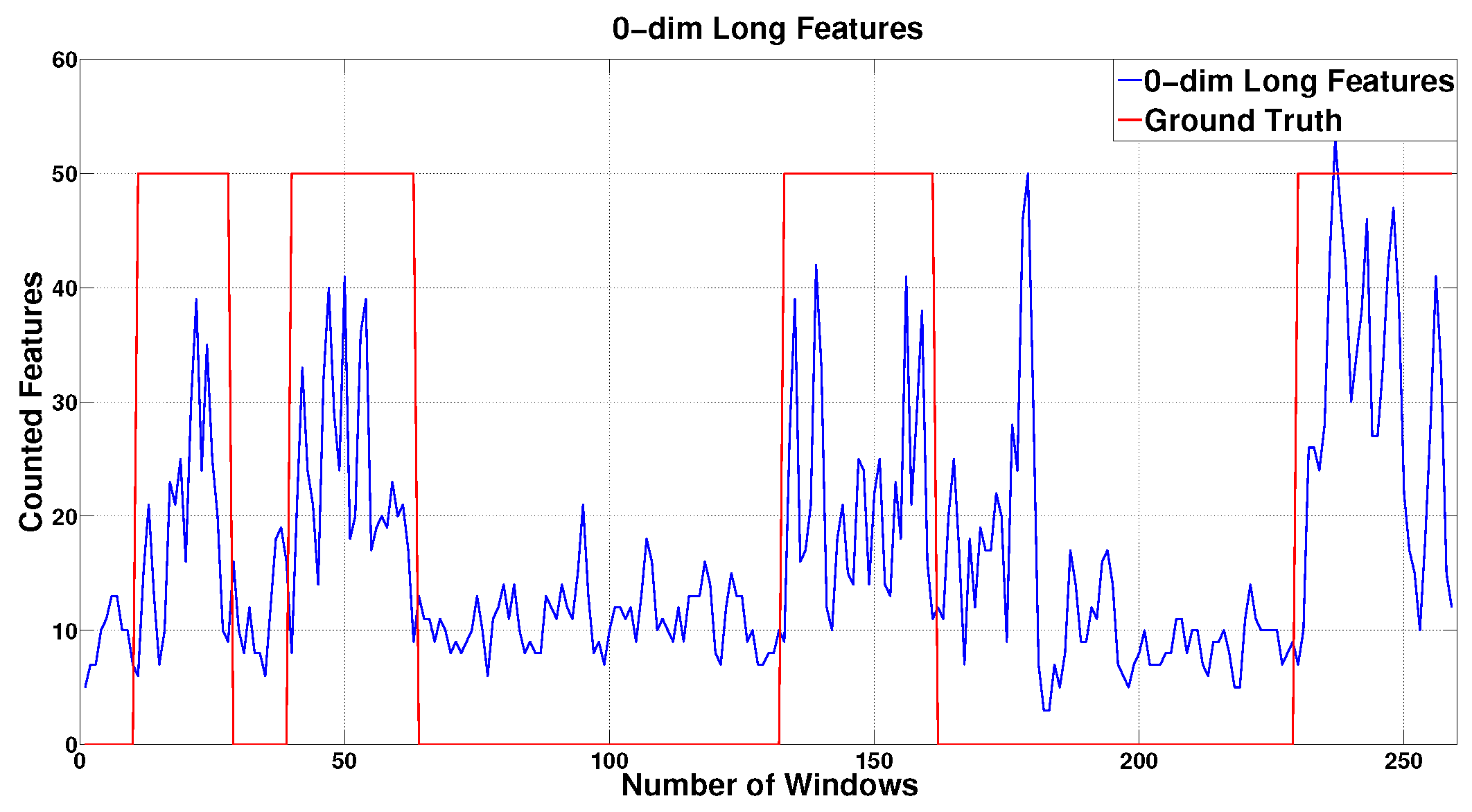
4.2.1. Relation between Descriptors and Room Occupancy
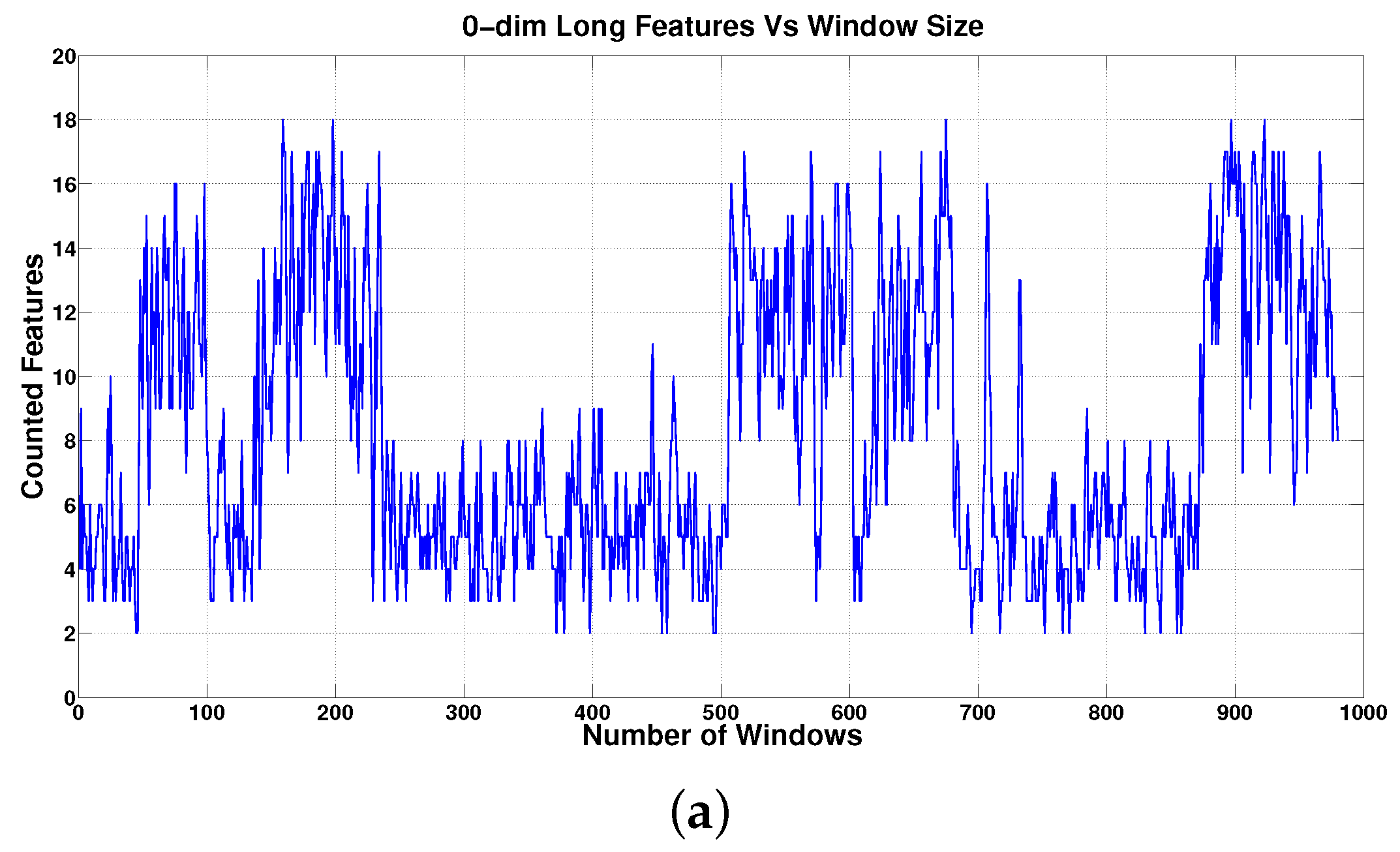
4.2.2. Dependence on the Window Size
4.2.3. Prediction Performance
5. Conclusions and Future Work
Acknowledgments
Conflicts of Interest
References
- Barsocchi, P.; Ferro, E.; Fortunati, L.; Mavilia, F.; Palumbo, F. EMS@ CNR: An energy monitoring sensor network infrastructure for in-building location-based services. In Proceedings of the 2014 International Conference on High Performance Computing & Simulation (HPCS), Bologna, Italy, 21–25 July 2014; pp. 857–862. [Google Scholar]
- Barsocchi, P.; Cimino, M.G.; Ferro, E.; Lazzeri, A.; Palumbo, F.; Vaglini, G. Monitoring elderly behavior via indoor position-based stigmergy. Pervasive Mob. Comput. 2015, 23, 26–42. [Google Scholar] [CrossRef]
- Barsocchi, P.; Crivello, A.; Girolami, M.; Mavilia, F.; Ferro, E. Are you in or out? Monitoring the human behavior through an occupancy strategy. In Proceedings of the 2016 IEEE Symposium on Computers and Communication (ISCC), Messina, Italy, 27–30 June 2016; pp. 159–162. [Google Scholar]
- Kleiminger, W.; Beckel, C.; Staake, T.; Santini, S. Occupancy detection from electricity consumption data. In Proceedings of the 5th ACM Workshop on Embedded Systems For Energy-Efficient Buildings, Roma, Italy, 11–15 November 2013; pp. 101–108. [Google Scholar]
- Chen, D.; Barker, S.; Subbaswamy, A.; Irwin, D.; Shenoy, P. Nonintrusive occupancy monitoring using smart meters. In Proceedings of the 5th ACM Workshop on Embedded Systems For Energy-Efficient Buildings, Roma, Italy, 11–15 November 2013; pp. 91–98. [Google Scholar]
- Patel, S.N.; Robertson, T.; Kientz, J.A.; Reynolds, M.S.; Abowd, G.D. At the flick of a switch: Detecting and classifying unique electrical events on the residential power line. In UbiComp 2007: Ubiquitous Computing; Springer-Verlag: Berlin, Germany, 2007; pp. 271–288. [Google Scholar]
- Ruzzelli, A.G.; Nicolas, C.; Schoofs, A.; O’Hare, G.M.P. Realtime recognition and profiling of appliances through a single electricity sensor. In Proceedings of the 2010 7th Annual IEEE Communications Society Conference on Sensor Mesh and Ad Hoc Communications and Networks (SECON), Boston, MA, USA, 21–25 June 2010; pp. 1–9. [Google Scholar]
- Rosdi, N.A.M.; Nordin, F.H.; Ramasamy, A.K. Identification of electrical appliances using non-intrusive magnetic field and probabilistic neural network (pnn). In Proceedings of the 2014 IEEE International Conference on Power and Energy (PECon), Kuching, Malaysia, 1–3 December 2014; pp. 47–52. [Google Scholar]
- Klingensmith, N.; Willis, D.; Banerjee, S. Extracting events from spatial time series. In Proceedings of the 11th ACM Conference on Embedded Network Sensor Systems, Roma, Italy, 11–15 November 2013; pp. 5–8. [Google Scholar]
- Ghrist, R. Barcodes: The Persistent Topology of Data. Bull. Am. Math. Soc. 2008, 45, 61–75. [Google Scholar] [CrossRef]
- Hatcher, A. Algebraic Topology; Cornell University: New York, NY, USA, 2001. [Google Scholar]
- Edelsbrunner, H.; Harer, J. Persistent homology—A survey. Contemp. Math. 2008, 453, 257–282. [Google Scholar]
- Zomorodian, A.; Carlsson, G. Computing Persistent Homology. Discret. Comput. Geom. 2005, 33, 249–274. [Google Scholar] [CrossRef]
- Otter, N.; Porter, M.A.; Tillmann, U.; Grindrod, P.; Harrington, H.A. A roadmap for the computation of persistent homology. arXiv 2017, arXiv:1506.08903. [Google Scholar] [CrossRef] [PubMed]
- Biasotti, S.; Falcidieno, B.; Giorgi, D.; Spagnuolo, M. Mathematical Tools for Shape Analysis and Description; Morgan & Claypool: Williston, VT, USA, 2014; Volume 6. [Google Scholar]
- Jonoska, N.; Saito, M. Discrete and Topological Models in Molecular Biology; Natural Computing Series; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Silva, V.D.; Ghrist, R. Coverage in sensor networks via persistent homology. Algebr. Geom. Topol. 2007, 7, 339–358. [Google Scholar] [CrossRef]
- Carlsson, G.; Ishkhanov, T.; de Silva, V.; Zomorodian, A. On the local behaviour of spaces of natural images. Int. J. Comput. Vis. 2008, 76, 1–12. [Google Scholar] [CrossRef]
- Perea, J.A.; Harer, J. Sliding Windows and Persistence: An Application of Topological Methods to Signal Analysis. Found. Comput. Math. 2015, 15, 799–838. [Google Scholar] [CrossRef]
- Pereira, C.M.; de Mello, R.F. Persistent Homology for Time Series and Spatial Data Clustering. Expert Syst. Appl. 2015, 42, 6026–6038. [Google Scholar] [CrossRef]
- Biasotti, S.; De Floriani, L.; Falcidieno, B.; Frosini, P.; Giorgi, D.; Landi, C.; Papaleo, L.; Spagnuolo, M. Describing Shapes by Geometrical-topological Properties of Real Functions. ACM Comput. Surv. 2008, 40, 12:1–12:87. [Google Scholar] [CrossRef]
- Tausz, A.; Vejdemo-Johansson, M.; Adams, H. JavaPlex: A research software package for persistent (co)homology. In Mathematical Software—ICMS 2014; Hong, H., Yap, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; pp. 129–136. Available online: http://appliedtopology.github.io/javaplex/ (accessed on 1 March 2017).







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barsocchi, P.; Cassará, P.; Giorgi, D.; Moroni, D.; Pascali, M.A. Computational Topology to Monitor Human Occupancy. Proceedings 2018, 2, 99. https://doi.org/10.3390/proceedings2020099
Barsocchi P, Cassará P, Giorgi D, Moroni D, Pascali MA. Computational Topology to Monitor Human Occupancy. Proceedings. 2018; 2(2):99. https://doi.org/10.3390/proceedings2020099
Chicago/Turabian StyleBarsocchi, Paolo, Pietro Cassará, Daniela Giorgi, Davide Moroni, and Maria Antonietta Pascali. 2018. "Computational Topology to Monitor Human Occupancy" Proceedings 2, no. 2: 99. https://doi.org/10.3390/proceedings2020099
APA StyleBarsocchi, P., Cassará, P., Giorgi, D., Moroni, D., & Pascali, M. A. (2018). Computational Topology to Monitor Human Occupancy. Proceedings, 2(2), 99. https://doi.org/10.3390/proceedings2020099