Impact of Beacon-Dependent Parameters on Bluetooth Low Energy Indoor Positioning Accuracy †

 ,
,  , and
, and
Abstract
:1. Introduction
- We provide a study on those parameters related to the configuration of beacons that can affect the positioning accuracy.
- We also study the impact on accuracy by increasing the number of orientations in the fingerprinting calibration phase.
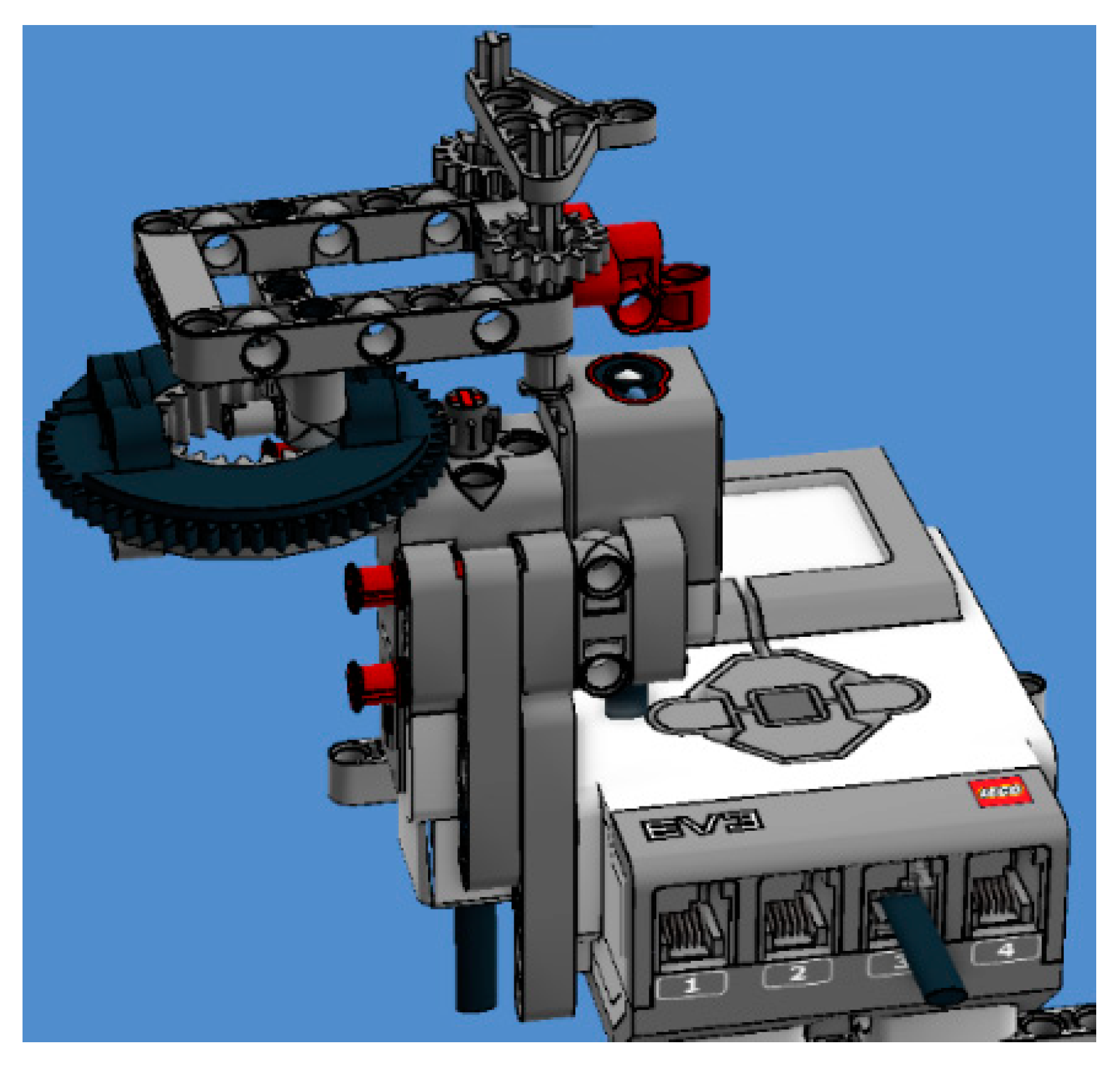
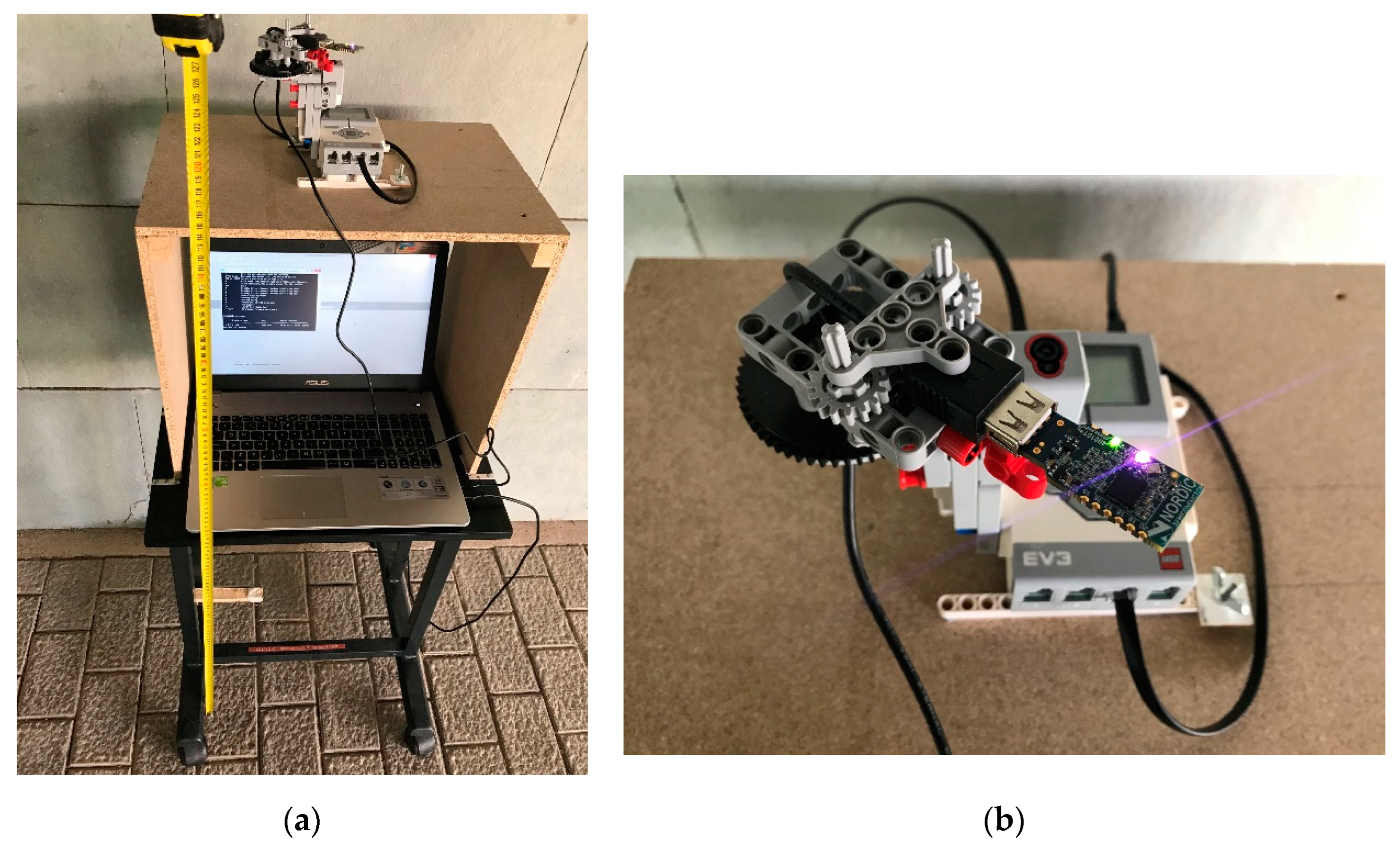
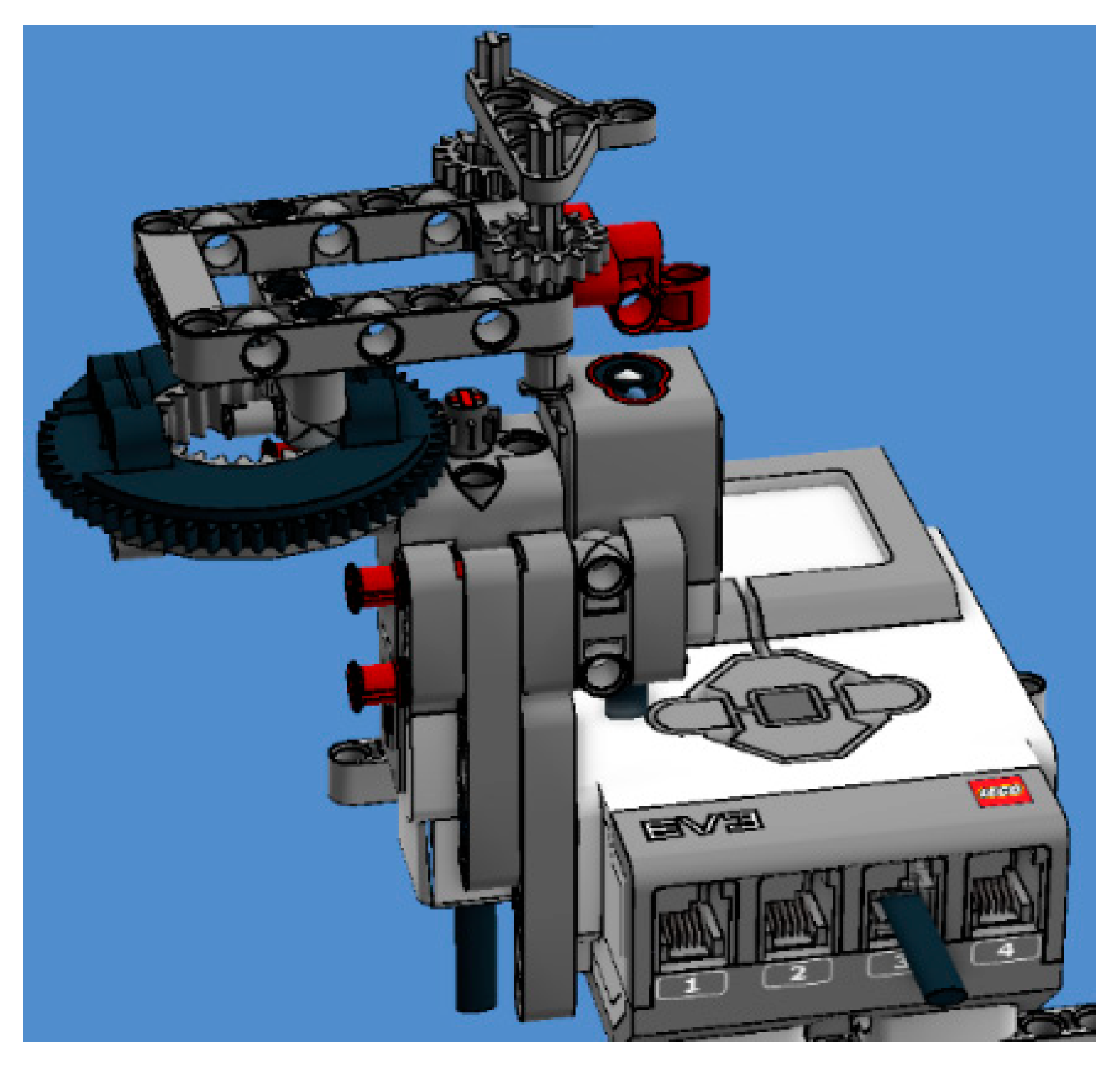
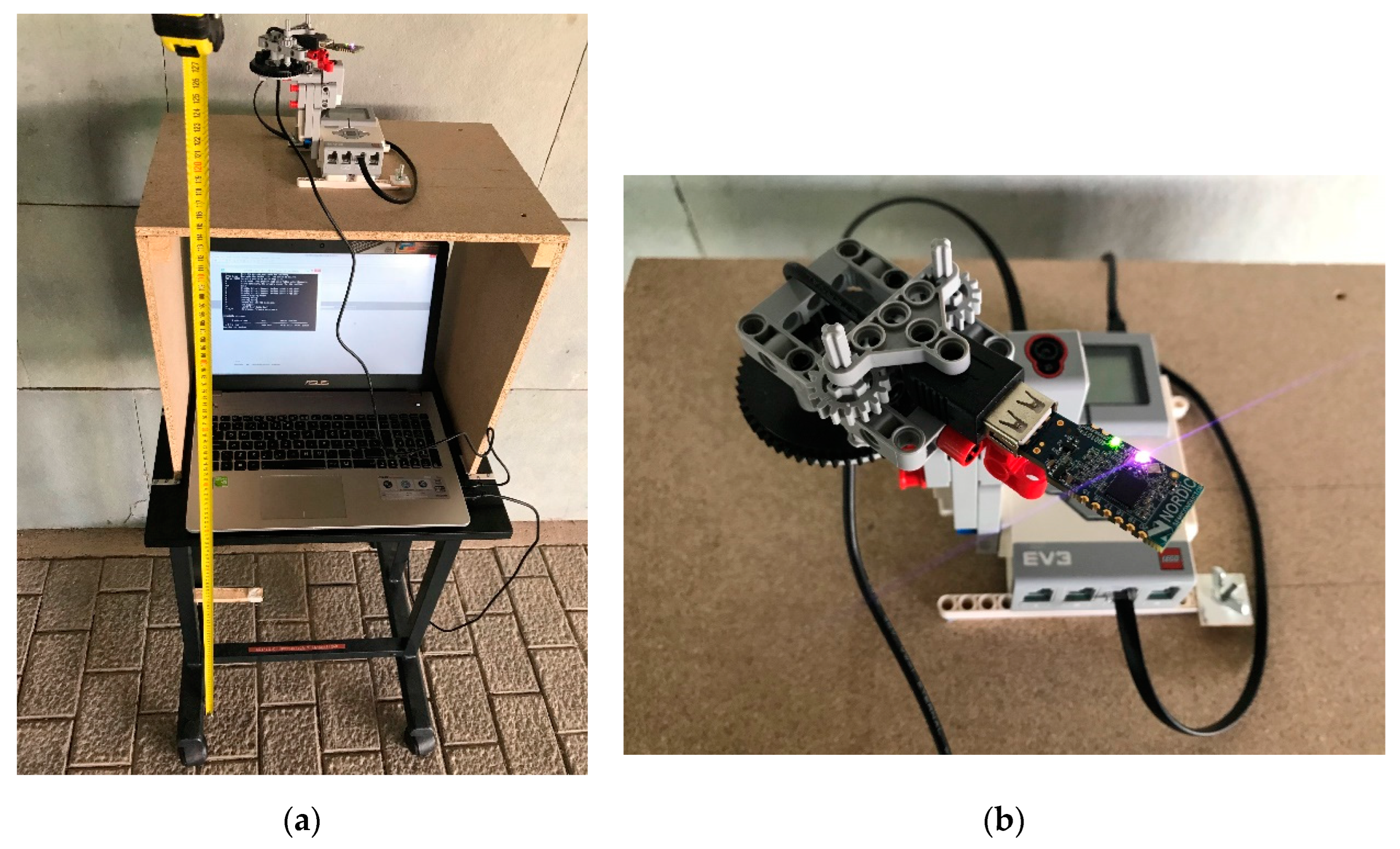
- We present a new semi-automatic system that, not only facilitates those studies mentioned above, but also shortens the duration of data collection.
2. Related Works
3. Material and Methods
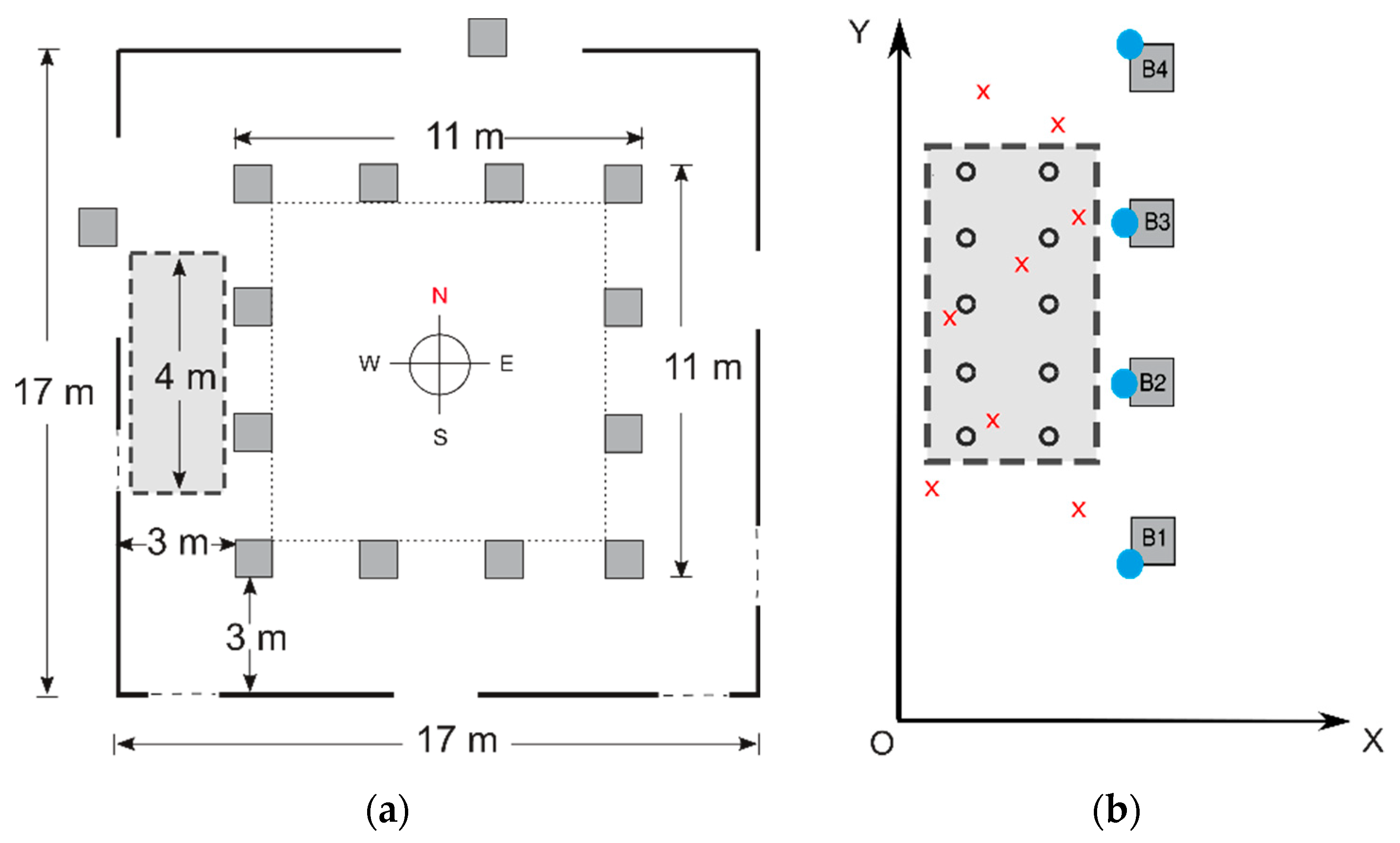
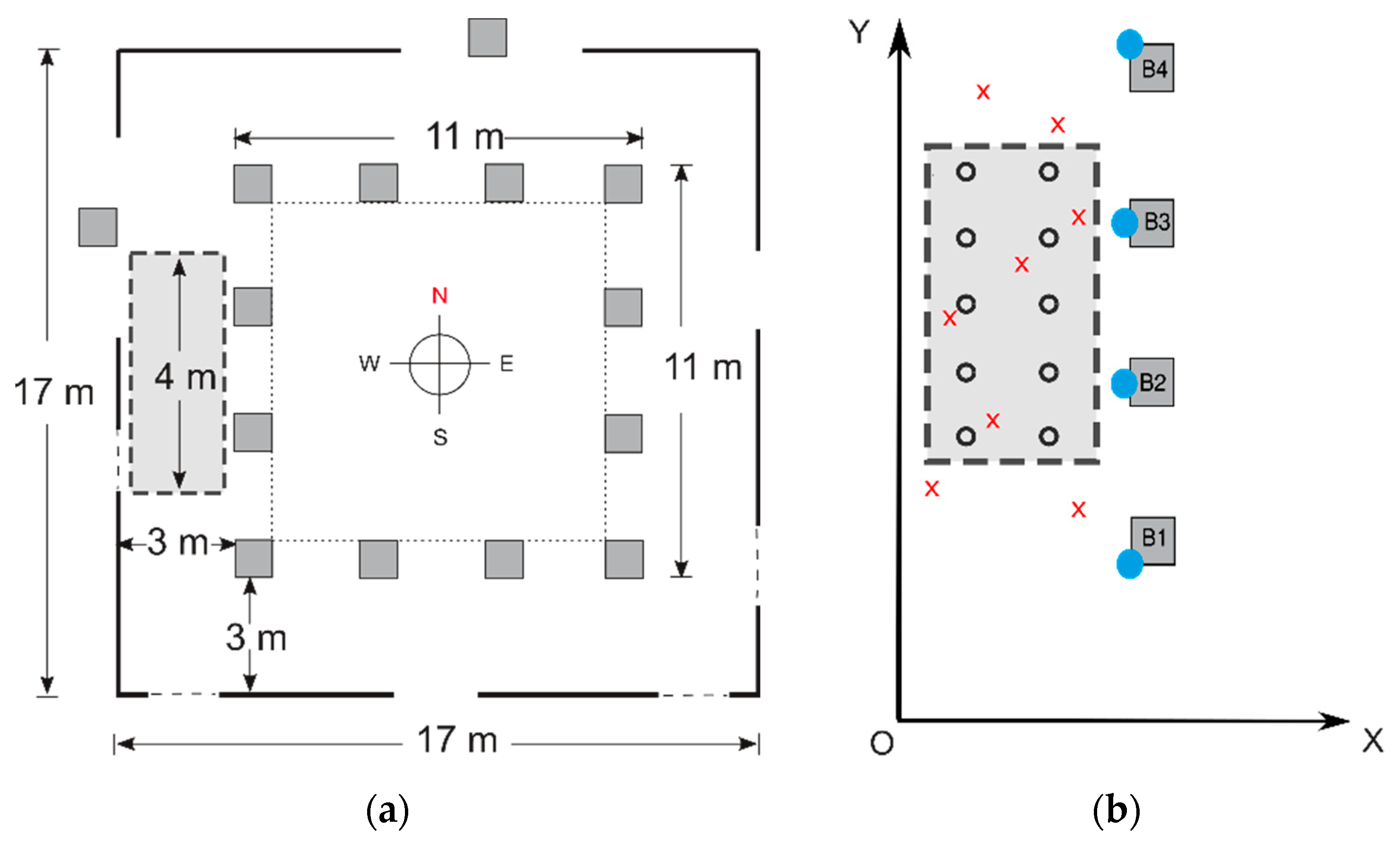
4. Experimental Setup
5. Results
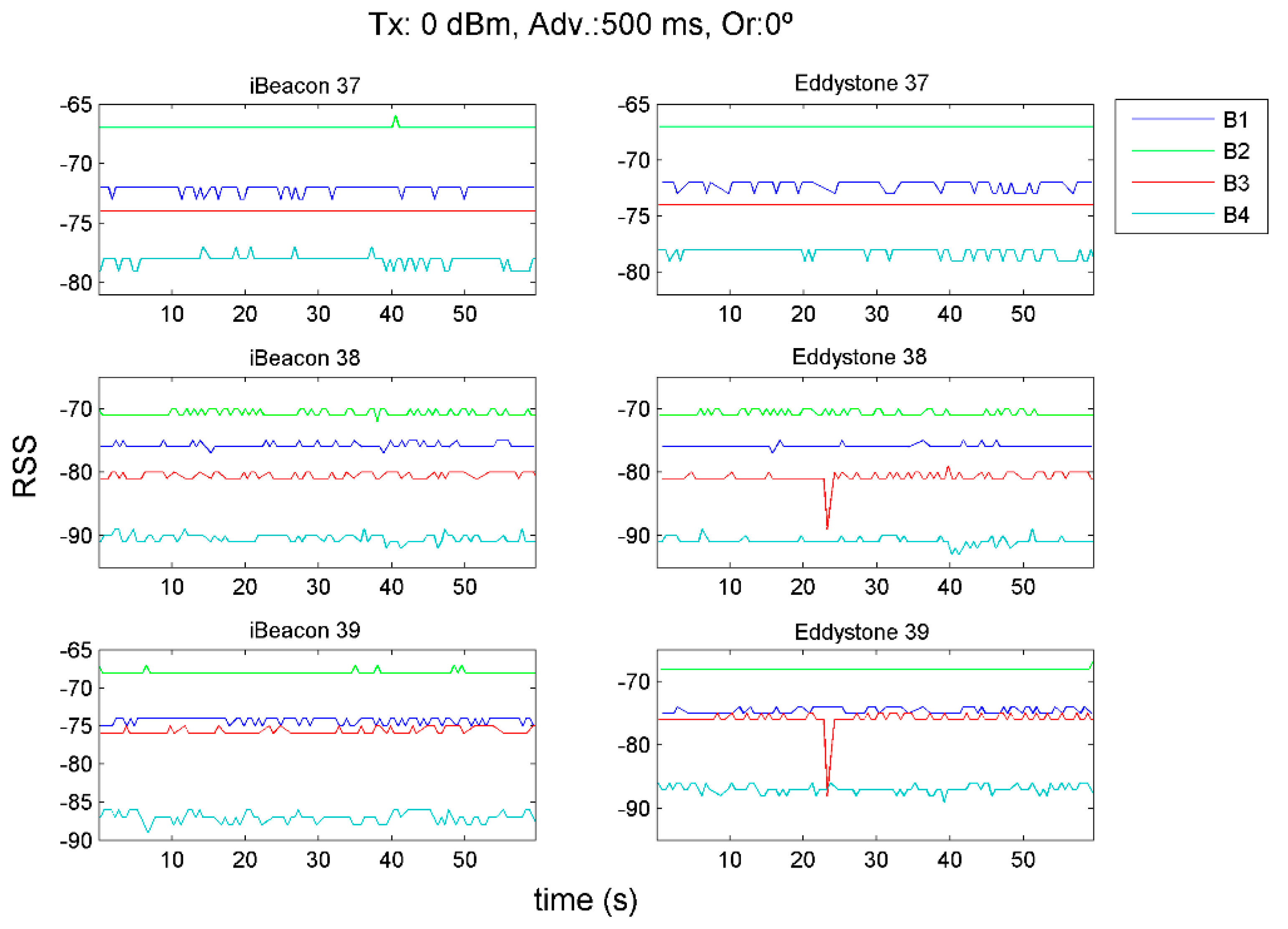
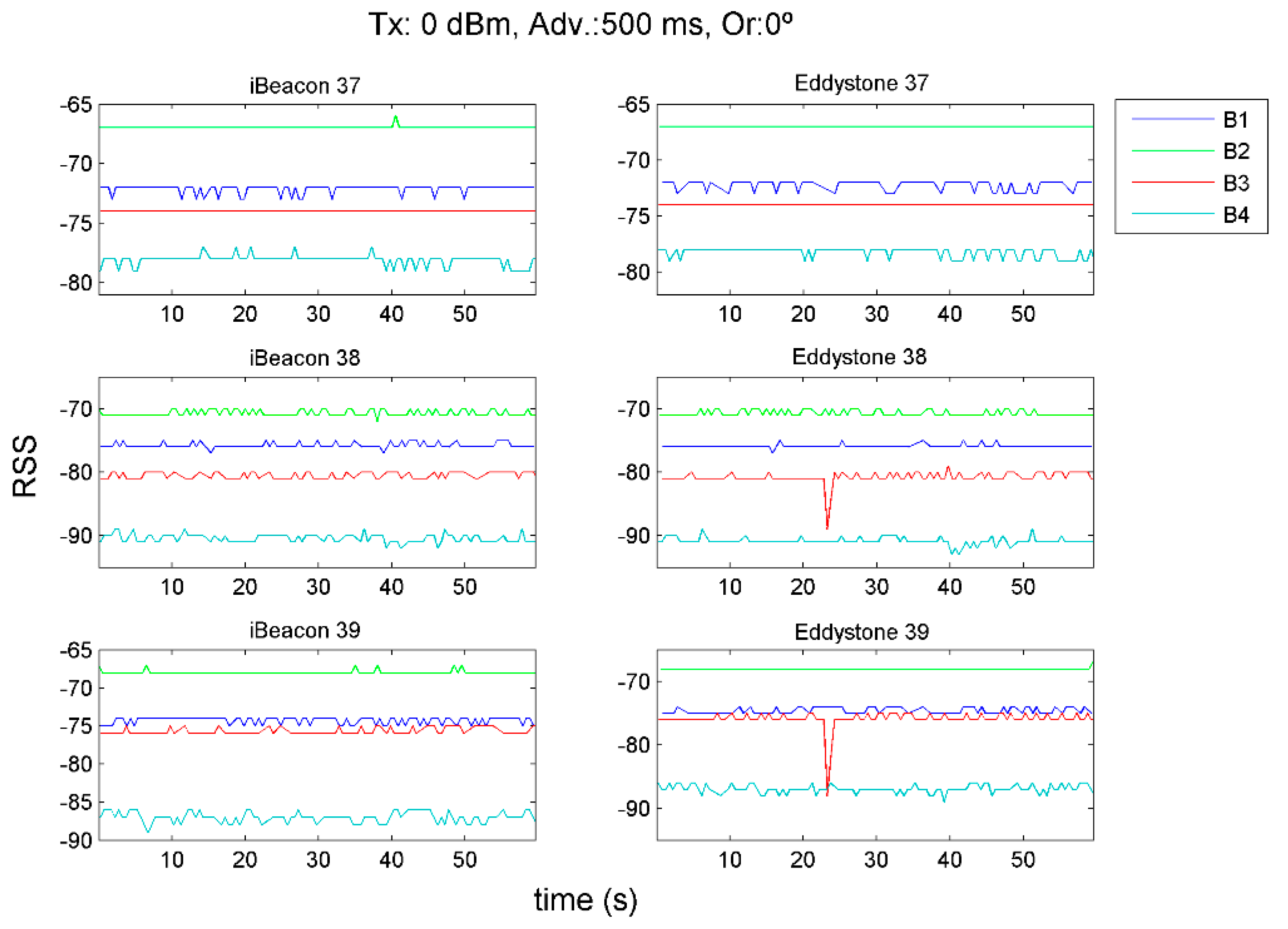
- Test1: The objective of the first test is to set the beacons’ transmission power and varying the advertising interval, A, to find what value produces the best accuracy.
- Test2: By setting the best advertising interval, A, obtained in Test 1, the objective of the second test is to vary the transmission power, Tx, to find the value that produces the best accuracy results.
- Test3: Setting both the best advertising interval, A, obtained in Test1 and the best transmission power, Tx, obtained in Test2, the objective of the third test is to detect if incrementing the number of orientations in the calibration phase the accuracy results improve significantly.
5.1. Test1 Results
5.2. Test2 Results
5.3. Test3 Results
6. Conclusions and Future Work
- There is clearly no advertising interval value that produces the best accuracy results.
- Best accuracies are obtained with all the beacons set to high transmission power values (Tx = + 4 dBm). Comparing these best values with those obtained for other transmission power values, differences can reach values of 70 cm, especially for random orientations.
- Better accuracy results are obtained by increasing the number of orientations in the calibration phase: differences can reach up to 60 cm depending on the protocol and channel.
Author Contributions
References
- Faragher, R.; Harle, R. Location fingerprinting with Bluetooth low energy beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- de Blasio, G.; Quesada-Arencibia, A.; García, C.R.; Molina-Gil, J.; Caballero-Gil, C. Study on an indoor positioning system for harsh environments based on wi-fi and bluetooth low energy. Sensors 2017, 17, 1299. [Google Scholar] [CrossRef] [PubMed]
- de Blasio, G.; Quesada-Arencibia, A.; García, C.R.; Rodríguez-Rodríguez, J.C.; Moreno-Díaz, R., Jr. A protocol-channel-based indoor positioning performance study for Bluetooth low energy. IEEE Access 2018, 6, 33440–33450. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. C (Appl. Rev.) 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. arXiv 2017, arXiv:1709.01015. [Google Scholar] [CrossRef]
- Davidson, P.; Piché, R. A Survey of Selected Indoor Positioning Methods for Smartphones. IEEE Commun. Surv. Tutor. 2017, 19, 1347–1370. [Google Scholar] [CrossRef]
- Kajioka, S.; Mori, T.; Uchiya, T.; Takumi, I.; Matsuo, H. Experiment of indoor position presumption based on RSSI of Bluetooth LE beacon. In Proceedings of the IEEE GCCE, Tokyo, Japan, 7–10 October 2014; pp. 337–339. [Google Scholar]
- Zhu, J.; Luo, H.; Chen, Z.; Li, Z. RSSI based Bluetooth low energy indoor positioning. In Proceedings of the IEEE IPIN, Busan, Korea, 27–30 October 2014; pp. 526–533. [Google Scholar]
- Faragher, R.; Harle, R. An analysis of the accuracy of Bluetooth low energy for indoor positioning applications. In Proceedings of the ION GNSS+, Tampa, FL, USA, 8–12 September 2014; pp. 201–210. [Google Scholar]
- Fard, H.K.; Chen, Y.; Son, K.K. Indoor positioning of mobile devices with agile iBeacon deployment. In Proceedings of the IEEE CCECE, Halifax, NS, Canada, 3–6 May 2015; pp. 275–279. [Google Scholar]
- Castillo-Cara, M.; Lovón-Melgarejo, J.; Bravo-Rocca, G.; Orozco-Barbosa, L.; García-Varea, I. An empirical study of the transmission power setting for Bluetooth-based indoor localization mechanisms. Sensors 2017, 17, 1318. [Google Scholar] [CrossRef] [PubMed]
- Castillo-Cara, M.; Lovón-Melgarejo, J.; Bravo-Rocca, G.; Orozco-Barbosa, L.; García-Varea, I. An analysis of multiple criteria and setups for Bluetooth smartphone-based indoor localization mechanism. J. Sens. 2017. [Google Scholar] [CrossRef]
- Lu, T.-T.; Yeh, S.-C.; Chen, C.-Y. A study of indoor positioning systems using iBeacons with different transmission power levels. J. Chin. Inst. Eng. 2017, 40, 525–535. [Google Scholar] [CrossRef]
- Sie, M.-K.; Kuo, C.-H. Indoor location estimation using BLE beacon with multiple transmission power levels. In Proceedings of the IEEE International Conference on Consumer Electronics, ICCE-TW, Taipei, Taiwan, 12–14 June 2017. [Google Scholar]
- He, W.; Ho, P.-H.; Tapolcai, J. Beacon deployment for unambiguous positioning. IEEE IoT J. 2017, 4, 1370–1379. [Google Scholar] [CrossRef]
- Pelant, J.; Tlamsa, Z.; Benes, V.; Polak, L.; Kaller, O.; Bolecek, L.; Kufa, J.; Sebesta, J.; Kratochvil, T. BLE device indoor localization based on RSS fingerprinting mapped by propagation modes. In Proceedings of the 2017 27th International Conference Radioelektronika (RADIOELEKTRONIKA), Brno, Czech Republic, 19–20 April 2017; pp. 1–5. [Google Scholar]
- ev3dev Home. Available online: http://www.ev3dev.org/ (accessed on 10 January 2018).
- Deza, M.M.; Deza, E. Encyclopedia of Distances, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 297–310. [Google Scholar]
- Cha, S.H. Comprehensive Survey on Distance Similarity Measures between Probability Density Functions. Int. J. Math. Mod. Methods Appl. Sci. 2007, 4, 300–307. [Google Scholar]
- Saraiva, R.; Lovisolo, L. RF Positioning: Fundamentals, Applications and Tools; Artech House Publishers: Boston, MA, USA, 2015; p. 5. ISBN 978-1-60807-816-5. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| iBeacon 37 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| East (0°) | North (90°) | West (180°) | South (270°) | Random | |||||||||||
| k/A | 300 | 500 | 950 | 300 | 500 | 950 | 300 | 500 | 950 | 300 | 500 | 950 | 300 | 500 | 950 |
| 1 | 1.6 | 1.1 | 1.2 | 1.5 | 1.5 | 1.2 | 1.5 | 1.1 | 1.7 | 1.3 | 1.2 | 1.5 | 0.9 | 1.5 | 1.3 |
| 2 | 1.4 | 1.1 | 1.2 | 1.6 | 1.3 | 1.5 | 1.3 | 1.3 | 1.7 | 1.3 | 1.3 | 1.3 | 1.1 | 1.4 | 1.4 |
| 3 | 1.5 | 1.3 | 1.3 | 1.6 | 1.3 | 1.6 | 1.3 | 1.3 | 1.5 | 1.4 | 1.3 | 1.3 | 1.3 | 1.5 | 1.4 |
| Eddystone 39 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| East (0°) | North (90°) | West (180°) | South (270°) | Random | ||||||
| k/Tx | 0 | +4 | 0 | +4 | 0 | +4 | 0 | +4 | 0 | +4 |
| 1 | 1.1 | 1.1 | 1.9 | 1.6 | 1.3 | 1.4 | 1.4 | 1.4 | 1.7 | 1.0 |
| 2 | 1.1 | 1.3 | 1.6 | 1.4 | 1.3 | 1.2 | 1.1 | 1.0 | 1.8 | 1.1 |
| 3 | 1.2 | 1.3 | 1.6 | 1.3 | 1.3 | 1.2 | 1.0 | 1.2 | 1.7 | 1.2 |
| iBeacon 37 | Eddystone 37 | iBeacon 38 | Eddystone 38 | iBeacon 39 | Eddystone 39 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| k | 4 CD | 8 ID | 4 CD | 8 ID | 4 CD | 8 ID | 4 CD | 8 ID | 4 CD | 8 ID | 4 CD | 8 ID |
| 1 | 1.5 | 1.2 | 1.6 | 1.3 | 1.5 | 1.0 | 1.7 | 1.1 | 1.0 | 1.1 | 1.0 | 1.1 |
| 2 | 1.6 | 1.3 | 1.6 | 1.3 | 1.4 | 1.2 | 1.4 | 1.2 | 1.2 | 1.1 | 1.1 | 1.1 |
| 3 | 1.4 | 1.3 | 1.5 | 1.3 | 1.4 | 1.3 | 1.4 | 1.3 | 1.3 | 1.1 | 1.2 | 1.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blasio, G.d.; Quesada-Arencibia, A.; Rodríguez-Rodríguez, J.C.; García, C.R.; Jr., R.M.-D. Impact of Beacon-Dependent Parameters on Bluetooth Low Energy Indoor Positioning Accuracy. Proceedings 2018, 2, 1223. https://doi.org/10.3390/proceedings2191223
Blasio Gd, Quesada-Arencibia A, Rodríguez-Rodríguez JC, García CR, Jr. RM-D. Impact of Beacon-Dependent Parameters on Bluetooth Low Energy Indoor Positioning Accuracy. Proceedings. 2018; 2(19):1223. https://doi.org/10.3390/proceedings2191223
Chicago/Turabian StyleBlasio, Gabriel de, Alexis Quesada-Arencibia, José Carlos Rodríguez-Rodríguez, Carmelo R. García, and Roberto Moreno-Díaz Jr. 2018. "Impact of Beacon-Dependent Parameters on Bluetooth Low Energy Indoor Positioning Accuracy" Proceedings 2, no. 19: 1223. https://doi.org/10.3390/proceedings2191223
APA StyleBlasio, G. d., Quesada-Arencibia, A., Rodríguez-Rodríguez, J. C., García, C. R., & Jr., R. M.-D. (2018). Impact of Beacon-Dependent Parameters on Bluetooth Low Energy Indoor Positioning Accuracy. Proceedings, 2(19), 1223. https://doi.org/10.3390/proceedings2191223