Flood Early Warning System by Twitter Using LoRa †


Abstract
:1. Introduction
2. Related Works
3. Design
3.1. Materials and Equipments
- Ultrasonic sensor jsn-sn04t-2.0.: this sensor works by emitting a sound pulse (TRIG), then the width of the return pulse (ECHO) is measured and the distance is calculated from the time differences between the Trig and Echo.Technical data of the sensor:
- Operating voltage: 5V DC
- Work current: 30 mA
- Detection range: 25 cm–450 cm
- Precision: It can vary between 3 mm to 0.3 cm
- Acoustic emission frequency: 40 KHz
- Minimum duration of the trigger pulse (TTL level): 10 S.
- Minimum waiting time between one measurement and the start of another: 20 ms.
- Detection angle: less than 50
- Waterproof (front)
- Diameter: 22 mm
- Length: 17 mm
- Work temperature: −10 C to 70 C
- The TTGO is a programmable card which integrates an OLED screen and a radio module SX1276 LoRa. They also include a LiPo battery charger. It can be configured as a transmitter or receiver, this configuration can be carried out through the Arduino IDE using the ESP32 Dev Module card type.
- The Wemos d1 card incorporates the esp8866 chip, which performs the processing tasks.Technical specifications:
- 11 digital I/O
- 1 Analog input
- Micro USB connector
- Wifi connection
- Raspberry Pi 3 Model B + is the latest single-board computer to date that has launched the Raspberry Pi foundation which has the following specifications:
- Broadcom BCM2837B0, Cortex-A53 (ARMv8) SoC de 64 bits a 1,4 GHz
- 1 GB LPDDR2 SDRAM
- 2,4 GHz and 5 GHz Wireless LAN - IEEE 802.11.b/g/n/ac
- 40 headers GPIO
- 4 USB 2.0 ports
- Micro SD port to load your operating system and store data
- 5 V/2.5 A DC power input
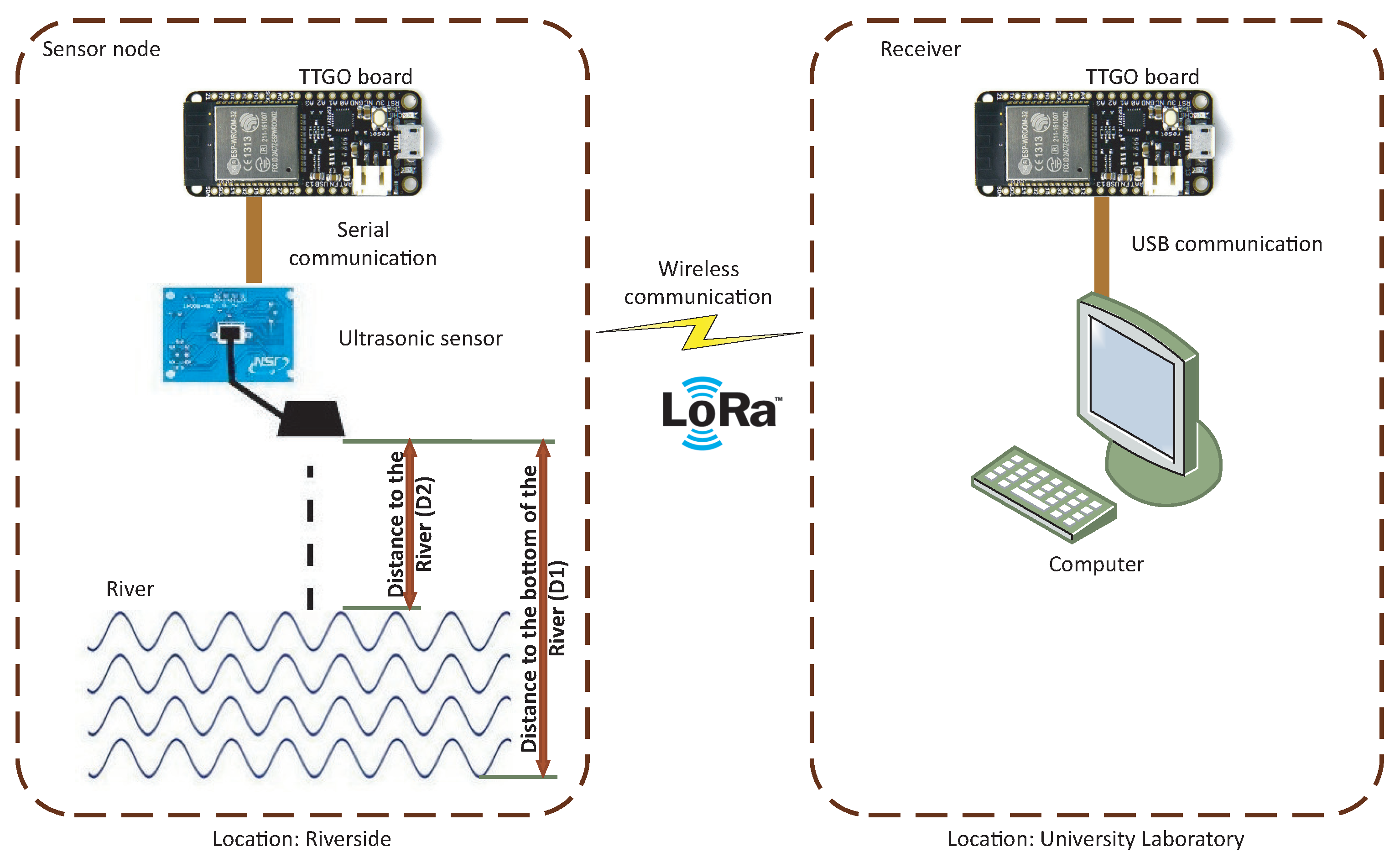
3.2. Architecture
- Jsn-sr04-2.0: is the sensor that will be used in the project which is a waterproof ultrasonic sensor.
- The microcontroller that works as an emitter is a TTGO in which the sensor will be connected, this card incorporates LoRa communication.
- The microcontroller that works as a receiver is a TTGO, since it has the same characteristics as the transmitter.
- The wemos mini: is configured as an access point to share the data with a computer.
- The Raspberry pi 3 b +: is a single-board computer in which the programming is developed to save the data on a database and in the same way the data will be published in a Twitter account.
4. Testing and Implementations
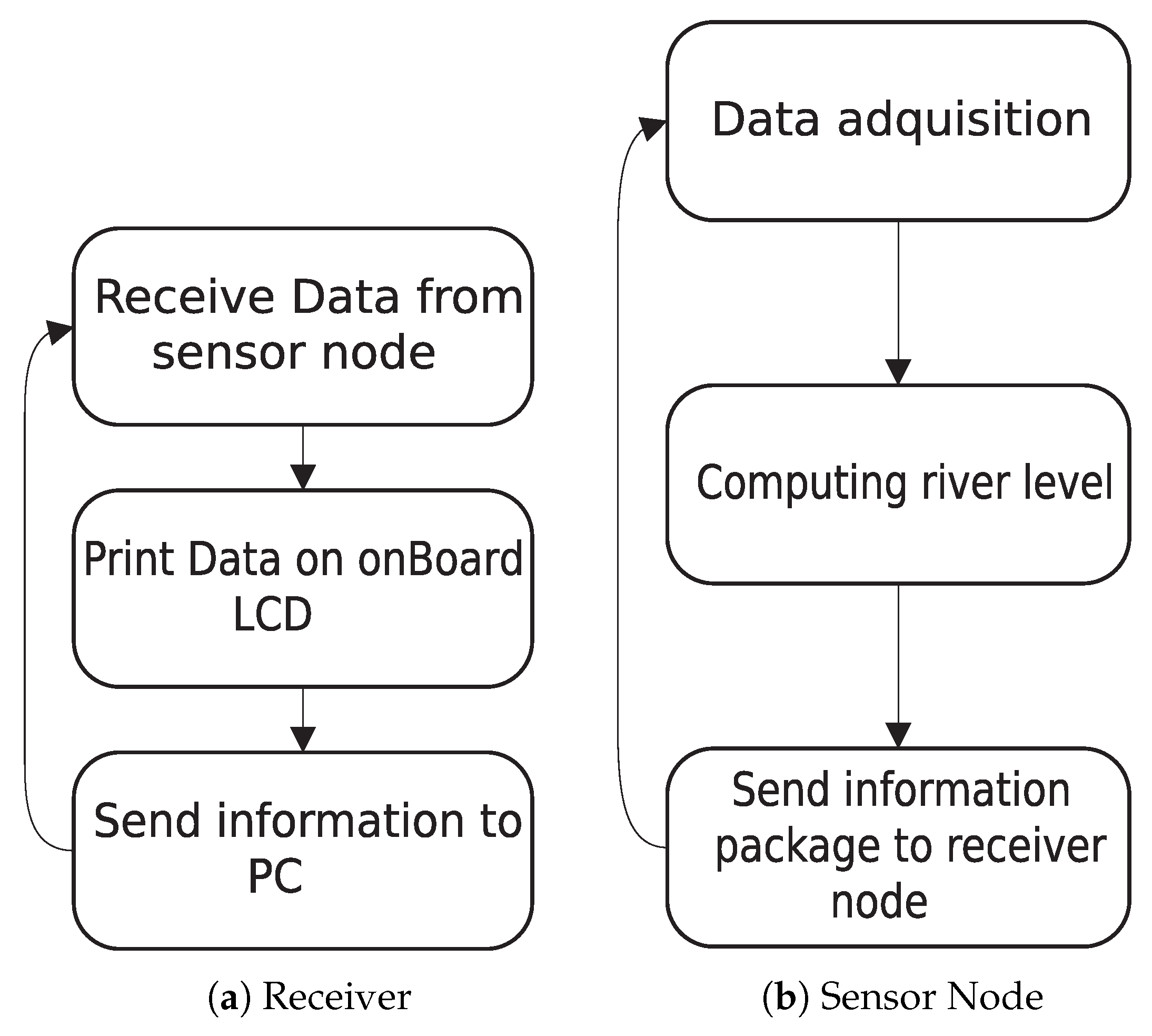
- The sensor reads the input variable, that in this case is the distance (in cms) of the water from the edge of the river.
- A mathematical operation is performed: The depth of the river (which is declared as constant in the program) minus the distance obtained.
- The result of this operation is sent into a data package of type string to the receiver node. This string is composed of the word depth, a blank space and the result of the operation converted into ASCII code.
- Receive the data package from the sensor node.
- Print the received data on the LCD screen.
5. Results
5.1. Prototype
5.2. Assessment
6. Conclusions and Future Works
Acknowledgments
Conflicts of Interest
References
- Pickering, P. Develop with LoRa for Low-Rate, Long-Range IoT Applications. Available online: https://www.digikey.com/en/articles/techzone/2017/jun/develop-lora-for-low-rate-long-range-iot-applications (accessed on 26 June 2017).
- Hernández-Nolasco, J.A.; Ovando, M.A.; Acosta, F.D.; Pancardo, P. Water level meter for alerting population about floods. In Proceedings of the International Conference on Advanced Information Networking and Applications, AINA, Crans-Montana, Switzerland, 23–25 March 2016. [Google Scholar]
- Wister, M.A.; Hernandez-Nolasco, J.A.; Pancardo, P.; Acosta, F.D.; Jara, A. Emergency population warning about floods by social media. In Proceedings of the 2016 10th International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing, IMIS 2016, Fukuoka, Japan, 6–8 July 2016. [Google Scholar]
- Nasimuzzaman Chowdhury, M.; Shiblee Nooman, M.; Sarker, S. Access Control of Door and Home Security by Raspberry Pi Through Internet. Int. J. Sci. Eng. Res. 2013, 4, 550–558. [Google Scholar]
- Campos Avila, P.E. Evaluación del Rango de Transmisión de LoRa Para Redes de Sensores Inalámbricas con LoRaWAN en Ambientes Forestales. Ph.D. Thesis, Universidad de Cuenca, Cuenca, Ecuador, 2017. [Google Scholar]
- Sakib, S.N.; Ane, T.; Matin, N.; Kaiser, M.S. An intelligent flood monitoring system for Bangladesh using wireless sensor network. In Proceedings of the 2016 5th International Conference on Informatics, Electronics and Vision (ICIEV) 2016, Dhaka, Bangladesh, 13–14 May 2016; pp. 979–984. [Google Scholar]
- Rodríguez Moreno, E.S.; López Ordoñez, V.F. Diseño e Implementación de un Sistema Inteligente para un Edificio Mediante IOT Utilizando el Protocolo de Comunicación LORAWAN. 2018. Available online: http://hdl.handle.net/11349/7394 (accessed on 15 April 2018).
- Monagas, M.G. Sistema automatizado de alerta temprana ante el peligro de inundaciones Automated system for early warning of potential flooding. Ingenieria Hidraulica y Ambiental 2013, XXXIV, 30–43. [Google Scholar]
- Neumann, P.; Montavont, J.; Noel, T. Indoor deployment of low-power wide area networks (LPWAN): A LoRaWAN case study. In Proceedings of the International Conference on Wireless and Mobile Computing, Networking and Communications, New York, NY, USA, October 17–19 2016. [Google Scholar]
- Coll, M.A.A. Sistemas de Alerta Temprana (S.A.T) para la Reduccion del Riesgo de Inundaciones Subitas y Fenomenos Atmosfericos en el Area Metropolitana de Barranquilla. Scientia et Technica 2013, 18, 303–308. [Google Scholar]
- Gutierrez, J. Medidor ultrasónico de nivel de agua para estanques. IngenierIa, Investigación y Tecnología 2006, VII, 234–244. [Google Scholar] [CrossRef]
- Ibrahim, M.; Elgamri, A.; Babiker, S.; Mohamed, A. Internet of things based smart environmental monitoring using the Raspberry-Pi computer. In Proceedings of the 2015 Fifth International Conference on Digital Information Processing and Communications (ICDIPC), Sierre, Switzerland, 7–9 October 2015; pp. 159–164. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | N Samples | Tape Measure [cm] | Sensor Mean [cm] | Sensor Standard Desv. | Standard Error |
|---|---|---|---|---|---|
| 1 | 10 | 50 | 50.099 | 0.316 | 0.1 |
| 2 | 10 | 100 | 100.199 | 0.421 | 0.133 |
| 3 | 10 | 150 | 150.199 | 0.421 | 0.133 |
| 4 | 10 | 200 | 200.199 | 0.421 | 0.133 |
| 5 | 10 | 250 | 250.299 | 0.483 | 0.152 |
| 6 | 10 | 300 | 300.099 | 0.567 | 0.179 |
| Item | N Samples | Tape Measure [cm] | Sensor Mean [cm] | Sensor Standard Desv. | Standard Error |
|---|---|---|---|---|---|
| 1 | 10 | 20 | 20.295 | 0.483 | 0.153 |
| 2 | 10 | 40 | 39.997 | 0.471 | 0.149 |
| 3 | 10 | 60 | 60.199 | 0.422 | 0.133 |
| 4 | 10 | 70 | 69.799 | 0.422 | 0.133 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leon, E.; Alberoni, C.; Wister, M.; Hernández-Nolasco, J.A. Flood Early Warning System by Twitter Using LoRa. Proceedings 2018, 2, 1213. https://doi.org/10.3390/proceedings2191213
Leon E, Alberoni C, Wister M, Hernández-Nolasco JA. Flood Early Warning System by Twitter Using LoRa. Proceedings. 2018; 2(19):1213. https://doi.org/10.3390/proceedings2191213
Chicago/Turabian StyleLeon, Ernesto, Cristian Alberoni, Miguel Wister, and Jose A. Hernández-Nolasco. 2018. "Flood Early Warning System by Twitter Using LoRa" Proceedings 2, no. 19: 1213. https://doi.org/10.3390/proceedings2191213
APA StyleLeon, E., Alberoni, C., Wister, M., & Hernández-Nolasco, J. A. (2018). Flood Early Warning System by Twitter Using LoRa. Proceedings, 2(19), 1213. https://doi.org/10.3390/proceedings2191213