Abstract
Due to the increasingly growth in population, it is important to better use natural resources for food production and efficiency, driving the use of sensors each time more to monitor several aspects of the soil and of the crops in the field. However, it is known that the harsh conditions of the field environment demands more robust and energy efficient sensor devices. One example is soil water monitoring for irrigation: Brazil, for example, consumes 69% of its freshwater only for irrigation purposes, which shows the need of using adequate water moisture sensors. Based on that, this work proposes a modular architecture that integrates several sensor technologies, including battery-less sensors and low power sensors for soil moisture measurements, but not limited to them. The proposed system relies on a mobile robot that can locate each deployed sensor autonomously, collect its data and make it available on-line using cloud services. As proof of concept, a low-cost mobile robot is built using a centimeter level accuracy location system, that allows the robot to travel to each sensor and collect their data. The robot is equipped with an UHF antenna to provide power to RF powered battery-less sensors, a Bluetooth low energy data collector and a Zigbee data collector. An experimental evaluation compares reading distance and successful rate of sensor location and reading.
1. Introduction
Agriculture is a key activity for humankind support. In that way, each time more, technological solutions are being adopted to enhance the productivity and reliability of agriculture. One key element of these new approaches is called "precision agriculture", which relies on sensors to gather information about the crop and field conditions, allowing Engineers, operators or automated systems to make decisions of how to treat crops. For automated systems, such sensors may be on the field or on a robot, and remotely read by wireless sensor networks or by the robot itself that acts as a relay.
One of the main inputs of Precision agriculture is information provided by sensors, that can be deployed on the field to measure several parameters of the soil, of the crops and of the environment. With the proliferation of sensors, sensors networks and the Internet of Things, precision agriculture now faces a reality of a large number of heterogeneous technologies and systems, such as Wifi, Zigbee, Bluetooth Low Energy, RFID, among others [1].
Such scenario increases the integration complexity for current systems, and for precision agriculture engineers, a wider choice options to decide which will be best for each application. With that in mind, we propose a modular sensor architecture based on an agricultural robotic platform capable of interacting and collecting data of these heterogeneous sensors installed on the field. We also discuss the main features of each type of communication technology available in the proposed architecture.
Another problem that may occur, is that permanently installed sensors and their communication infrastructure may frequently be damaged by surges, lighting and other events of the field’s harsh environment. Hu et al. [2] describes and discusses their observations regarding a long-term deployment of sensor networks on a sugar farm, and they note that if the devices are not carefully and properly secured and installed, they may be damaged. The main idea is to provide enough communication infrastructure for a mobile robot that operates on the field, to be able to locate sensors, and collect information from them.
The usage of robotics in agriculture is becoming each time more important, as the robotics systems prices are more accessible, and the robots are robust enough for usage on the field. It is now commonplace to observer automated and robotic tractors, harvesters and other machines used on farms. These technologies are already mature and becoming each time more used. However, these machines usually operate by pre-programmed routes and waypoints, and do not usually collect data from the field.
Nevertheless, it is certainly interesting for these machines to carry a module that autonomously collect sensor information, to provide reliable information from the crop status, for the planning of next missions. Unfortunately, there is not an Universal standard for wireless communication with sensors, and manufacturers adopt several communication options. In that way, it is interesting to include heterogeneus communication systems on a datalloger or robot, in other to interact to as many devices as possible.
It should be noted that the usage of the mentioned sensing and monitoring technologies, is not restricted only to plants, but also for animals and other agricultural products. One example is the work of Handcock et al. [3], which uses wireless sensor networks to monitor animal behavior.
2. Robot Design
2.1. Embedded System Architecture
Figure 1 depicts an overview of the proposed architecture. A central computer, which can be an industrial computer of even a Raspberry PI 3 is connected to several devices do inquire sensors:
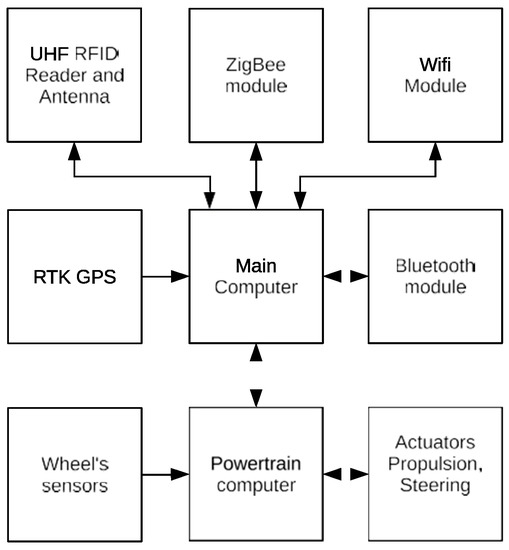
Figure 1.
Overview of the proposed architecture.
- RFID Reader: an UHF/EPC/GEN2 RFID reader, which can read passive or active RFID tags and RFID sensor tags or even RFID dataloggers;
- Zigbee module: ZigBee is a commonly used technology on farm automation systems and robotics. It is proposed that a ZigBee module is connected to the Central computer using a serial (TX/RX) connection;
- Wifi module: as more and more Internet of Things (IoT) devices are becoming available with Wifi interface, it is important to have a Wifi connection on the system. If a Raspberry PI 3 is used, its built-in Wifi module has shown to be reliable for the proposed architecture;
- Bluetooth module: a Bluetooth Low Energy (BLE) module is also important to collect data of Bluetooth-enabled devices. Again, if a Raspberry PI 3 is used, its built-in Bluetooth is compatible with the proposed architecture;
- RTK GPS: The localization of sensors is a key aspect of the field robotics discussed in this work. It is important for the robotic system, to precisely locate and identify sensors deployed on the field. A RTK GPS will provide the desired accuracy for such task;
- Powertrain computer: Consists of a micro controlled device, capable of sensing the state of the robot (wheel’s speeds, for examples), and controlling motors based on commands sent by the main computer. It is the device responsible for directly controlling the robot’s moves.
During usage on the field, it has been noted that the micro SD card used to store all the Raspberry PI system, can disconnect with vibration and heat, avoiding its usage. In that way, better fixation for the micro SD card should be considered with Raspberry PI based systems. The Beagle Bone board is another interesting option, and it is more robust than the Raspberry, as the system can operate from the soldered Flash memory, dispensing the need of an external SD Card, which can cause errors. Other options are industrial grade PCs, which are more expensive, but robust enough for field operations.
2.2. Mechanical Frame Design
There were a few choices available for a robotic test from previous projects as shown in Figure 2.
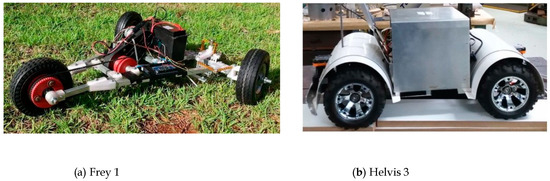
Figure 2.
Available robotic platform. (a) First version of Frey robot; (b) Third version of Helvis robot [4].
Despite the options available, neither have the frame to support ThingMagic M6 RFID reader, nor a reasonable height from ground to attach it. Thus, a evolution of Frey is being carried out. Figure 3 shows the new design and its initial assembly. The controllers along with mission planning are in development.
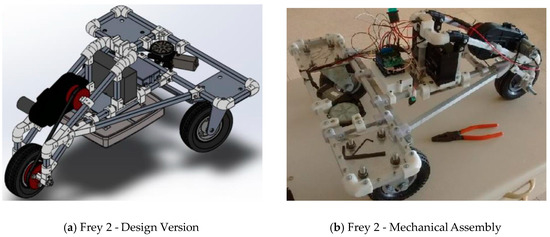
Figure 3.
Frey structure modified (a) Assembly CAD drawing (b) Frey mechanical assembly. Mechanical design and assembly done by Flávio B. Vieira.
3. Results and Discussion
3.1. Wireless Communication Systems Evaluation
In order to evaluate the wireless communication performance of each technology, a test was conducted on the field. A box with a sensor connected to a two-way communication channel was built and displaced to several distances, while being monitored by a uBlox RTK GPS with 900 MHz link [5].
For the Wifi test, an arbitrary sensor was connected to a low power embedded LinkIt 7688 Duo Internet of Things module [6]. A DELL laptop with Network controller Qualcomm Atheros QCA9565/AR9565 Wireless Network Adapter was used to scan for the presence of the LinkIt module, and when found, connect to it, and continuously query sensor information. The tests were done using Linux Operating System.
For the ZigBee test, a pair of 900 MHz XBEE Series 1 [7] modules from Digi International were used with built-in wire antenna. One module was connected to an Arduino board, which could read sensor information and transmit using the XBEE module as a radio modem. On the base station, another XBEE module, was directly connected to the USB port of the computer via a carrier board. The sensor module transmitted its timestamp, in order to later allow the analysis of its performance.
For the Bluetooth Low Energy (BLE) test, a NINA-B1 [8] from uBlox module was used. The module was tested being installed on the uBlox development board EVK-NINA-B1, which provides a mBed compatible environment for developing BLE applications with NINA modules. To scan for the module, connect to it and collect data, a DELL computer was used, with its built-in Bluetooth module. The tests were done using Linux Operating System, and standard Bluetooth commands available with Ubuntu Linux.
For the RFID test, a ThingMagic M6 RFID reader was used with a directional antenna pointed from the base station to the field. Such system was used to provide power to a battery-less and wireless sensor tag application board SL900A, from Austria Microsystems (AMS), which is able to harvest power from the RF signal to supply voltage to the sensor and provide its reading to the reader.
Each technology was separately tested, but the reading antenna of all other technologies was kept on during the tests, so the robot can travel on the field monitoring for signals of all mentioned systems and collecting data, when available. In order to analyse the communication distance between the collecting station and experimental sensor nodes, a uBlox NEO-M8P low cost RTK GPS was used. To guarantee that the provided location information is reliable, the GPS was also tested, and it yielded a precision of 5 cm when the RTK mode is operating. This receiver was purchased as an early prototype, and the manufacturer has recently announced that better precision and accuracy can be obtained updating the receiver firmware (this was not performed in the tested GPS receiver). In that way, during the field tests, the GPS accuracy was between 5 cm and 20 cm. Today u-blox announces the release of firmware version 1.20 for the NEO-M8P module. This is the newest feature addition upgrade for the small, highly cost-effective, and very precise RTK-based module.
As a first preliminary result, the maximum distance is presented in Table 1 along with other tested characteristics, the read rate was fixed at 10 Hz for all technologies except for the RFID system.

Table 1.
Table with wireless technologies comparisons.
Table 1 can be used and interpreted depending on how the measurements should be done. If a coarse map suffice and a greater area should be reached, a sensor net using WIFI could be a good solution providing infrastructure to power the sensors. However, if a diverse map in quality should be achieve, it is possible to mix ZigBee with BLE and RFID tags to have more sensors connected in the network without the need of too much power. Figure 4 illustrate such architecture idea.
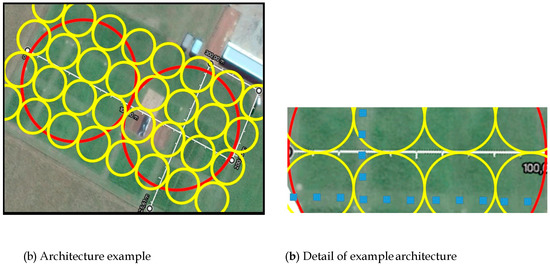
Figure 4.
Coverage example of a sensor mix grid/network for farm monitoring Images from Google Maps (Experimental crop area of EMBRAPA at São Carlos, Brazil). (a) Network for a small farm, red circles are maximum distance for Zigbee, yellow circles are maximum distance for BLE (b) Blue squares are RFID Tags.
It is possible to infer that each sensor communication modality will have a specific set of sensors attached to it. For a fine analysis of soil, sensors can be linked to RFID tags, that a robot will collect the informations, also, other sensors attached to BLE and Zigbee can describe the region of the measurements and lead to a better map of soil parameters, for instance.
4. Conclusions
This article presents an architecture to allow a robotic system, which can be aerial of terrain, or of any other type, to navigate and collect data of sensors from heterogeneous sensor communication technologies on the field. Such possibility is interesting with the growing number of precision agriculture technologies, which still do not follow a specific standard, so manufactures produce sensors with different communications interfaces.
The proposed architecture includes consolidated communication interfaces, such as the ZigBee, already widely used in farms. The system is also capable of collecting data of Bluetooth Low Energy (BLE) sensors, which have shown good energy performance, and is a promising technology for low-cost, low-power embedded sensor nodes. Moreover, BLE module is very small (about 10 mm × 10 mm). Another technology included and evaluated is Wifi. Althought not originally developed for embedded sensors, new low-power devices are each time more available with Wifi interfaces, as Wifi is a standard common interface for wireless communication. RFID communication was also tested: although it does not cover long ranges, it is a promising technology for battery-free and wireless sensors, which can harvest power from the RFID reader signal.
One interesting finding in the experiments conducted, is that all these communication technologies can be embedded and used simultaneously on the robot. This is quite a possible scenario, as heterogeneous sensors from different suppliers can be deployed on the field. Although both RFID, the RTK-GPS link and ZigBee all operate at 900 MHz, we did not notice harmful interference on each other. In fact, all of them worked well together, showing the feasibility of building robots and data collecting systems with heterogeneous communication technologies.
Author Contributions
All authors participated in the design of the experiment, in writing and reviewing the text. André Hernandes specifically contributed with the low-level controllers of Frey 2 and with the field experiment. Rafael Aroca contributed with the gathering and analysis of the data. Marcelo Becker contributed with the high level controllers of Frey 2, Daniel Magalhães contributed with GPS signals acquisition and analysis.
Acknowledgments
The authors would like to thank the financial support of the Brazilian Research Council (CNPq), Grant 441630/2014-6 and from the The São Paulo Research Foundation (FAPESP).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ruiz-Garcia, L.; Lunadei, L.; Barreiro, P.; Robla, I. A Review of Wireless Sensor Technologies and Applications in Agriculture and Food Industry: State of the Art and Current Trends. Sensors 2009, 9, 4728–4750. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Dinh, T.; Corke, P.; Jha, S. Design and deployment of long-term outdoor sensornets: Experiences from a sugar farm. IEEE Pervasive Comput. 2010, 11, 82–91. [Google Scholar] [CrossRef]
- Handcock, R.N.; Swain, D.L.; Bishop-Hurley, G.J.; Patison, K.P.; Wark, T.; Valencia, P.; Corke, P.; O’Neill, C.J. Monitoring Animal Behaviour and Environmental Interactions Using Wireless Sensor Networks, GPS Collars and Satellite Remote Sensing. Sensors 2009, 9, 3586–3603. [Google Scholar] [CrossRef] [PubMed]
- Velasquez, A.E.B.; Higuti, V.A.H.; Guerrero, H.B.; Becker, M. Helvis—A Small-scale Agricultural Mobile Robot Prototype for Precision Agriculture. In Proceedings of the 13th International Conference on Precision Agriculture (ICPA2016), St. Louis, MO, USA, 31 July–3 August 2016; Volume 1, pp. 1–18. [Google Scholar]
- NEO-M8P. U-Blox M8 High Precision GNSS Modules. Available online: https://www.u-blox.com/en/ product/neo-m8p (accessed on 10 November 2016).
- LinkIt Smart 7688 Duo. Available online: https://www.seeedstudio.com/LinkIt-Smart-7688-Duo-p-2574. html (accessed on 10 November 2016).
- XBEE. Connected Devices to the Cloud. Available online: https://www.digi.com/lp/xbee (accessed on 10 November 2016).
- NINA-B1. Stand-Alone Modules with Bluetooth Low Energy. Available online: https://www.u-blox.com/ en/product/nina-b1 (accessed on 10 November 2016).
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).