
Development of a Three-Finger Adaptive Robotic Gripper to Assist Activities of Daily Living

 ,
,  ,
,  , and
, and 
Abstract
1. Introduction
2. Methodology
2.1. Design Objectives
2.2. Materials and Components Selections
2.2.1. Materials
2.2.2. Actuators
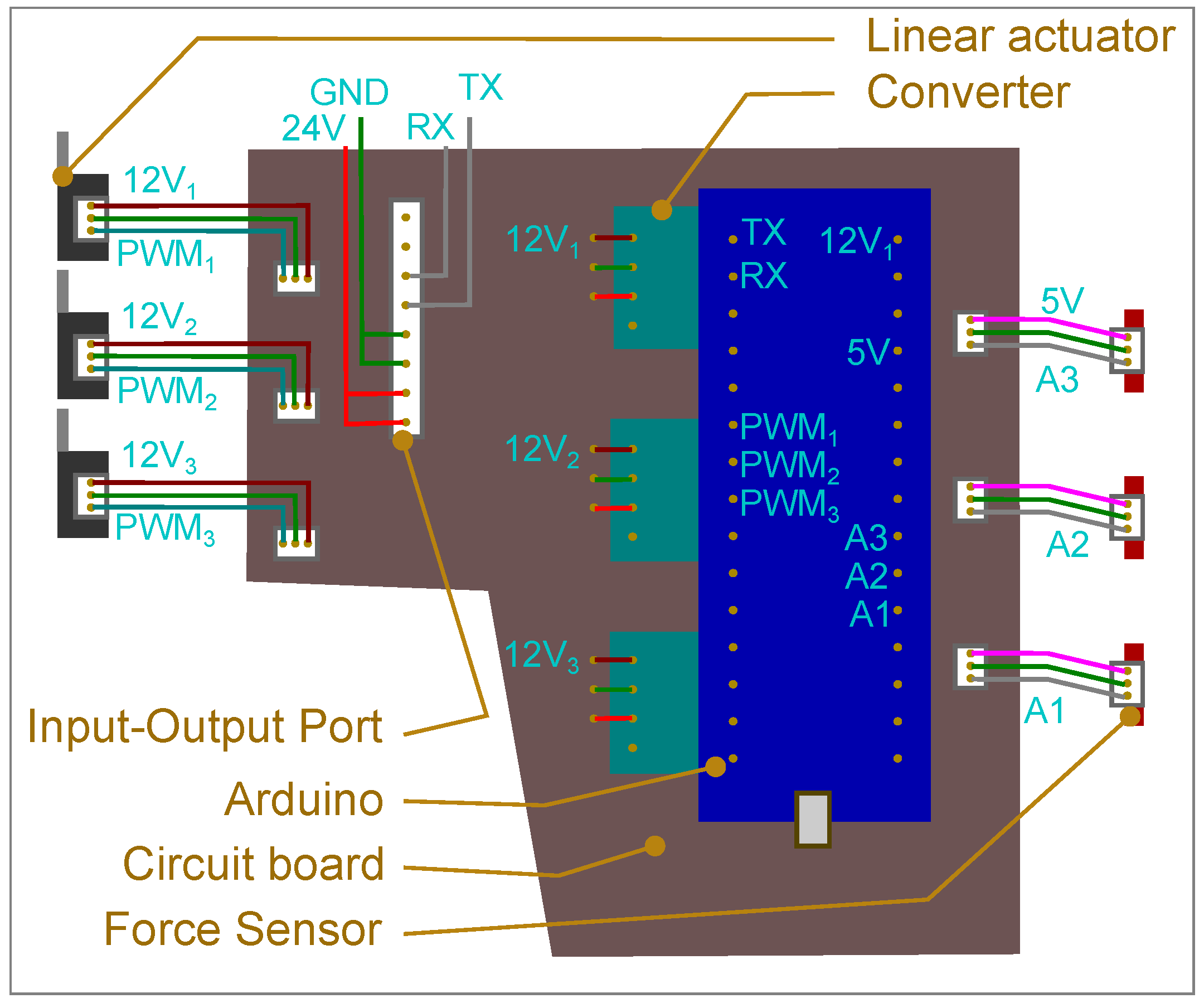
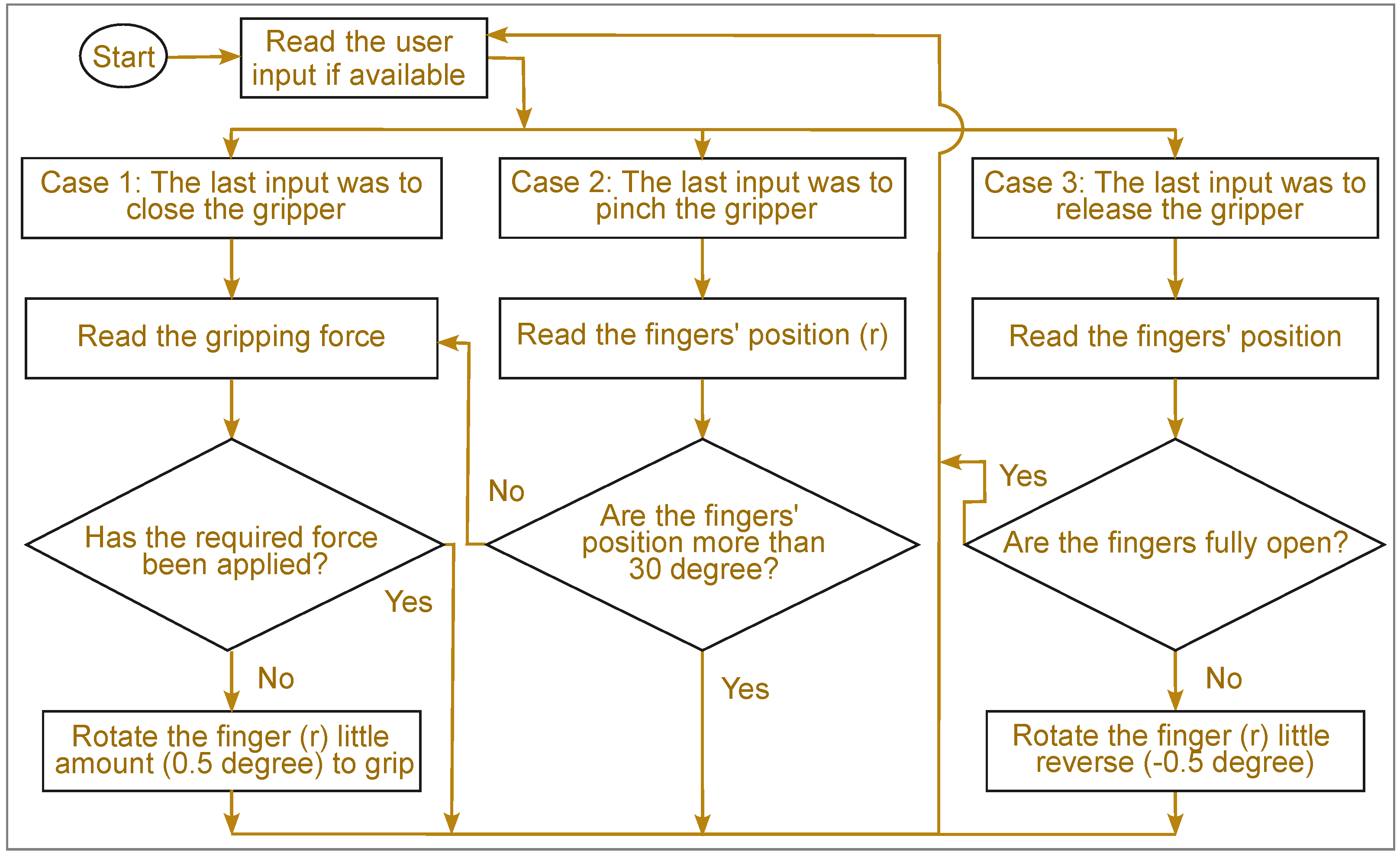
2.2.3. Electronic Control System and Motor Driver
2.3. Mechanical and Electrical Design
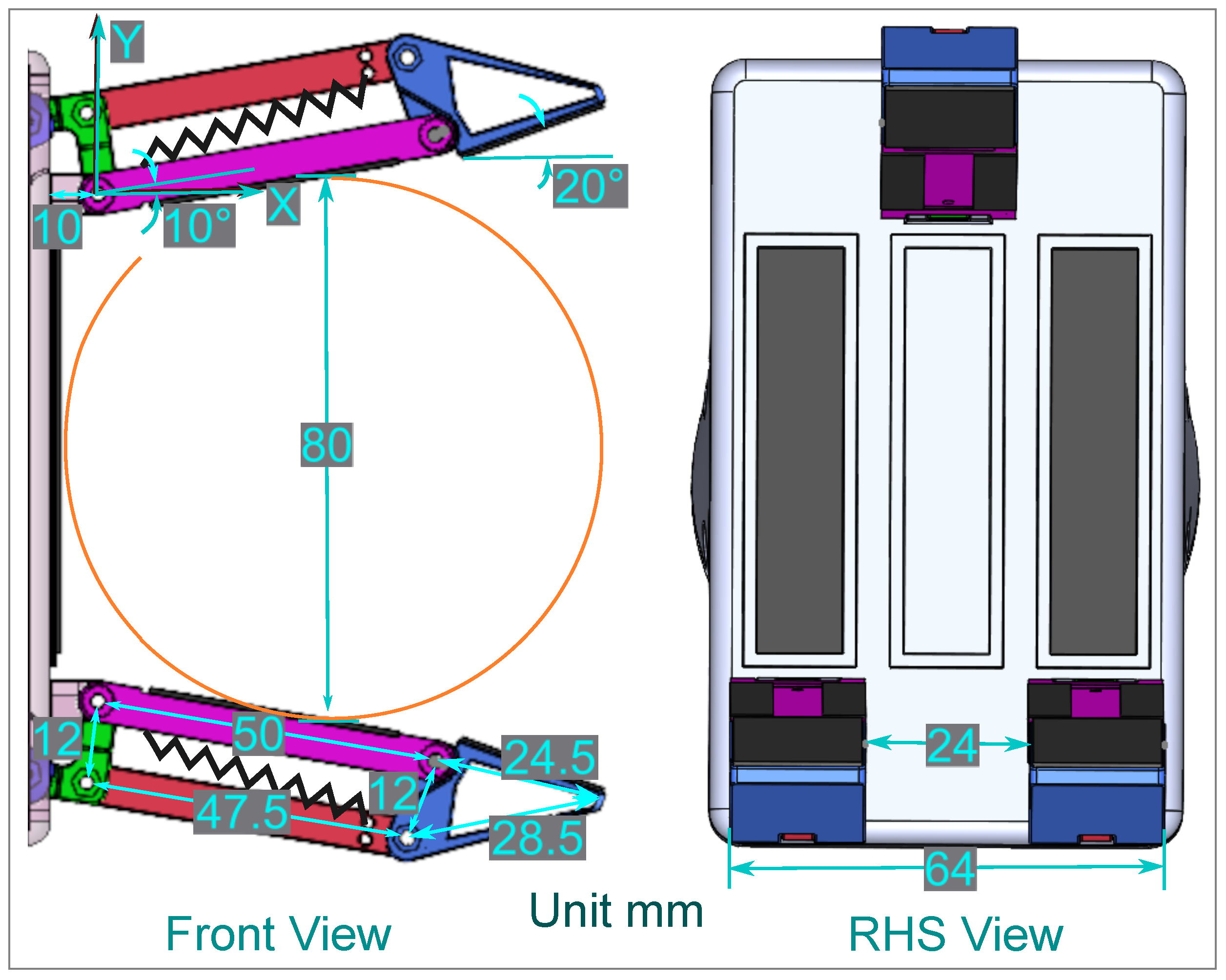
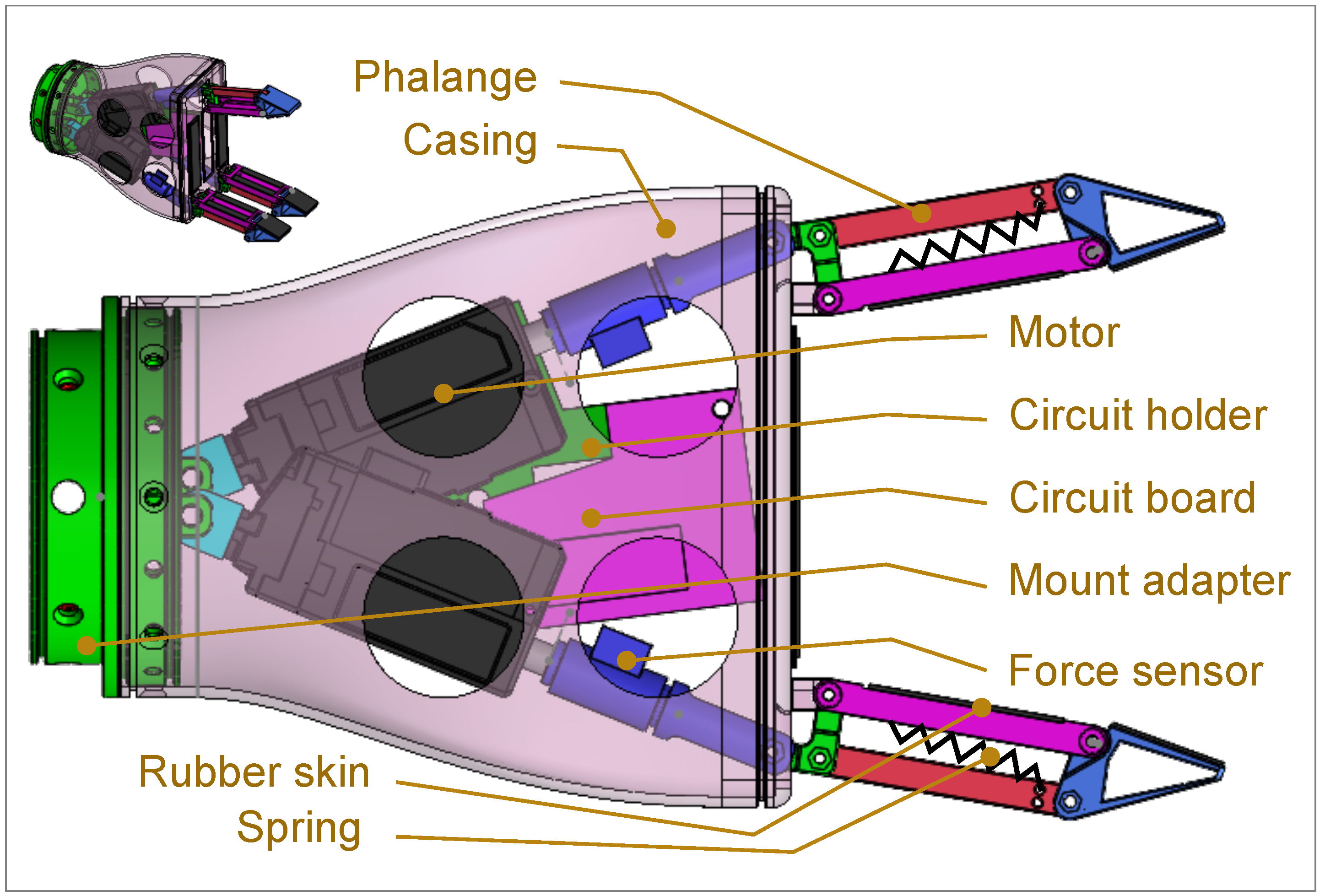
2.3.1. Finger Design

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gripper Properties | Actuators, MightyZap 12Lf-100PT-27 [38] | ||
|---|---|---|---|
| Materials | PLA | Input voltage | DC 6V-13V |
| No of Fingers | 3 | Max Current | 1.6 A |
| DoFs in each finger | 2 | Stroke | 27 mm |
| No of Actuator | 3 (Underactuated) | Linear rated force | 100 N |
| Length of each finger | 84.5 mm | Stall force at 1000 mA | 48 N |
| Range of motion (degree) from x-axis | Joint1: −90 to 10, Joint2: −45 to 20 | Max speed | 7.7 mm/s |
| Holding capacity | Size: 80 mm, Weight: 2.9 kg | Mechanical self-lock | Yes |
| Gripping type | Cylindrical, parallel, and partial spherical | Size (Excluding spindle and hinge) | 57.4 × 29.9 × 15 mm3 |
| Finer position at idle | Fully closed | Weight (Excluding spindle and hinge) | 48 g |
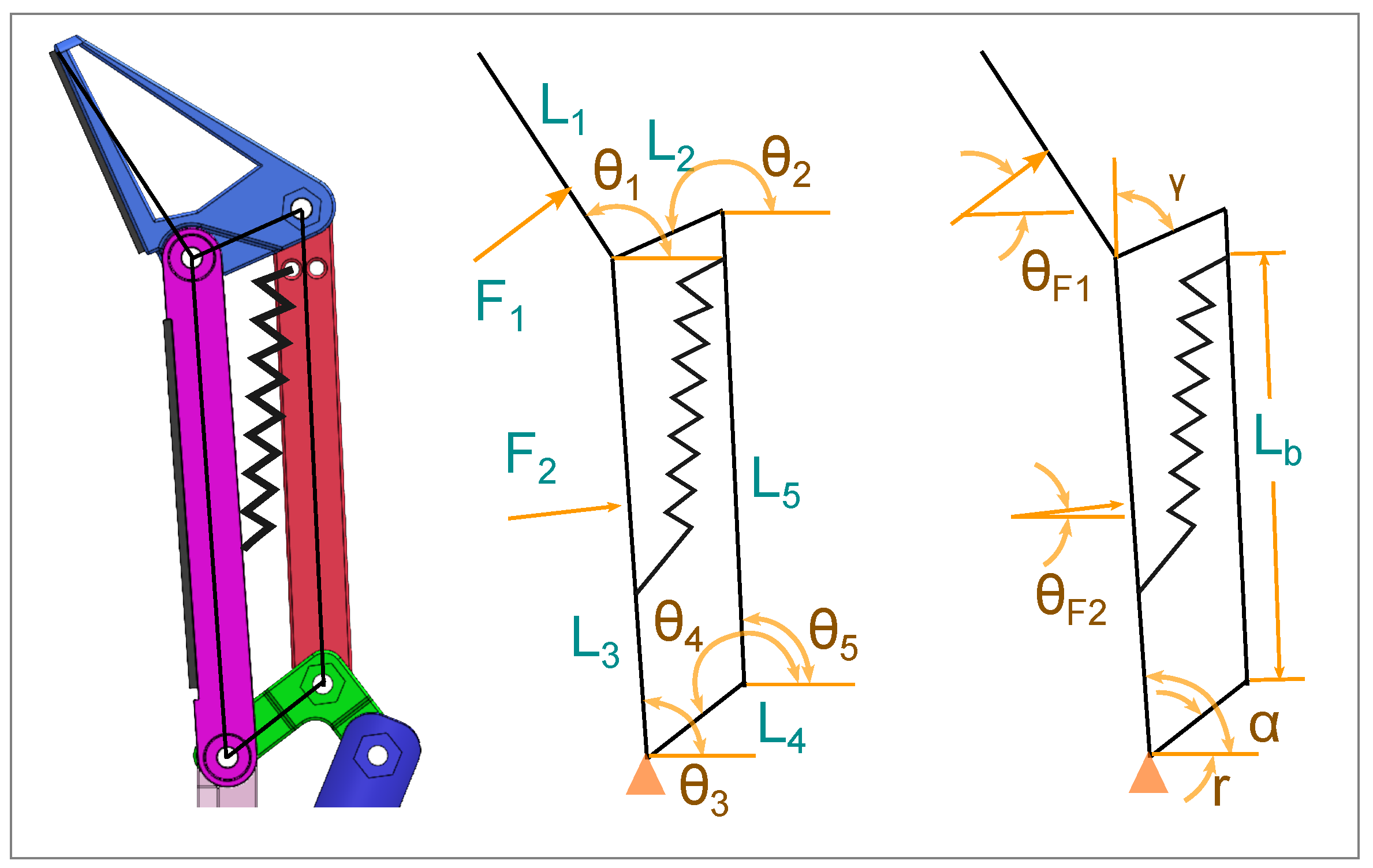
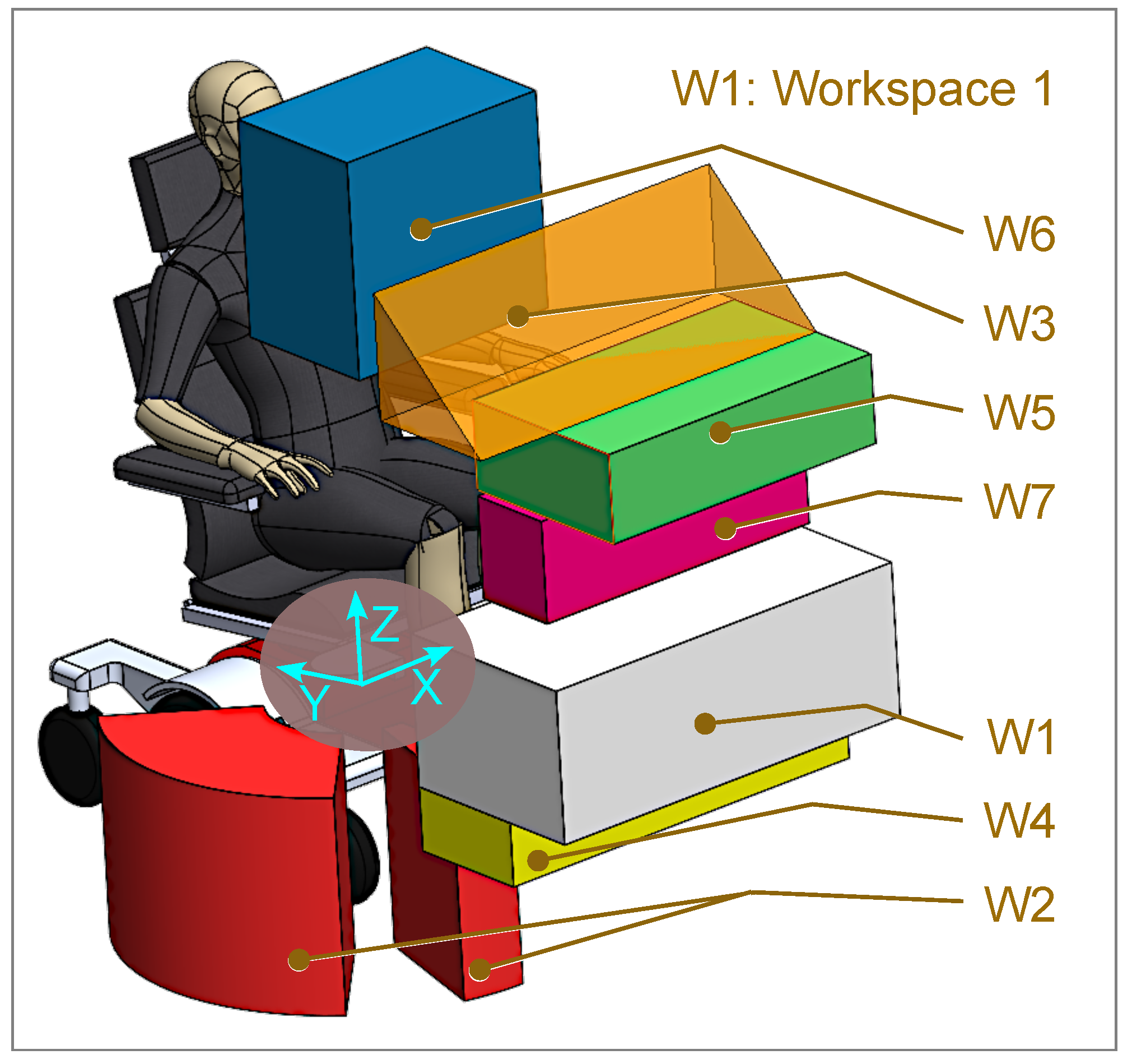
2.3.2. Spatial Position of the Flanges
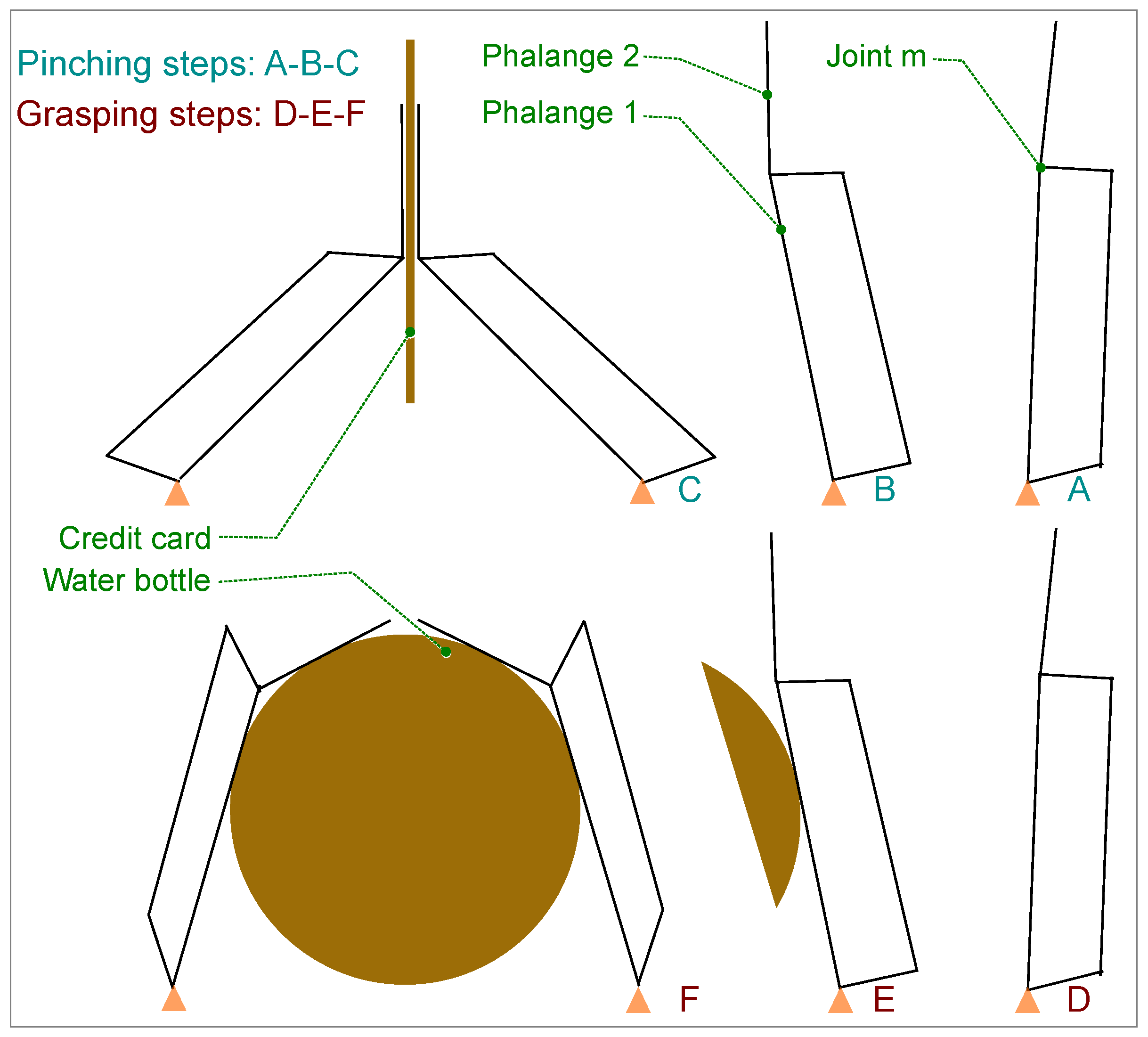
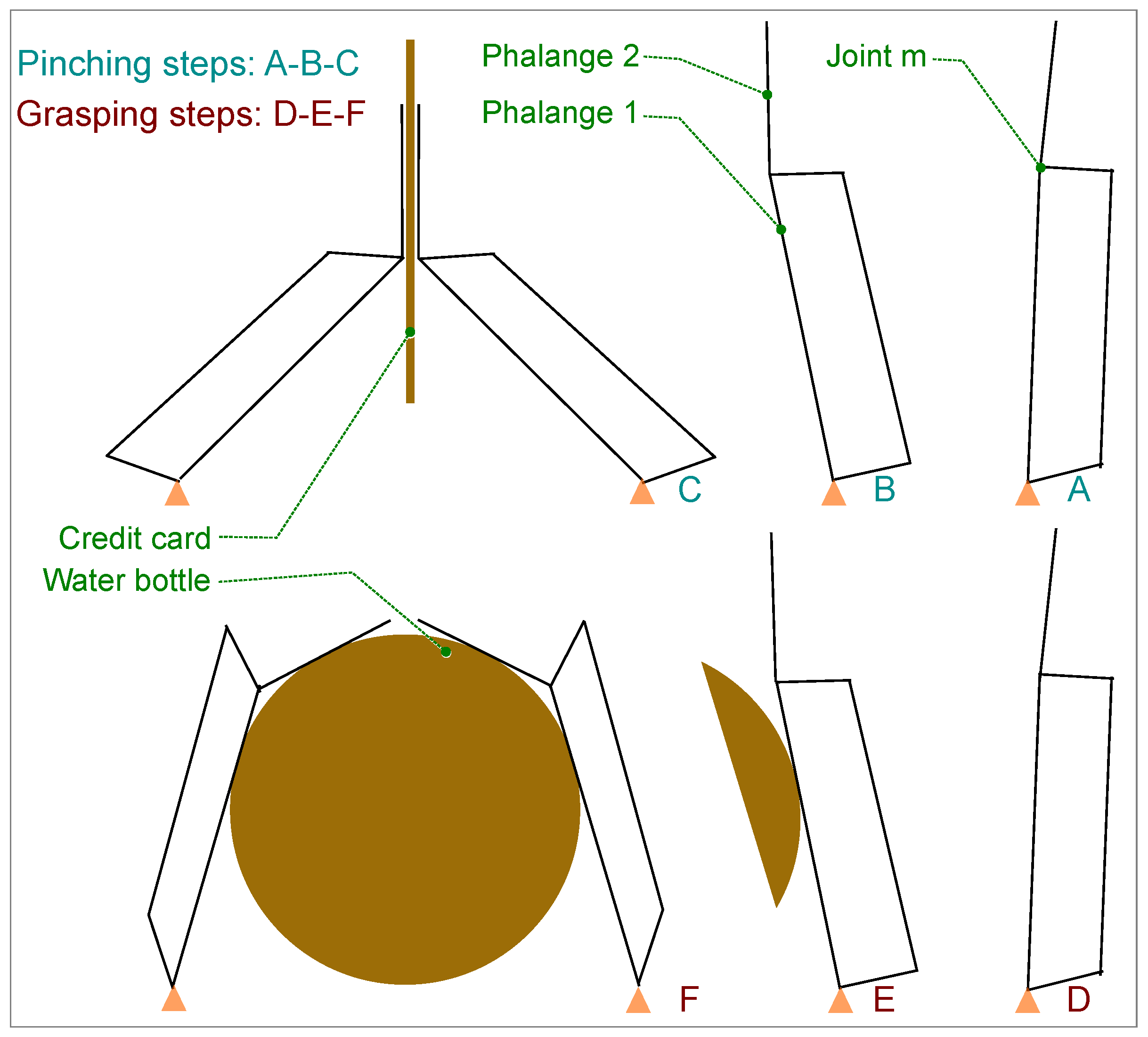
2.3.3. Design of Phalanges for Pinching
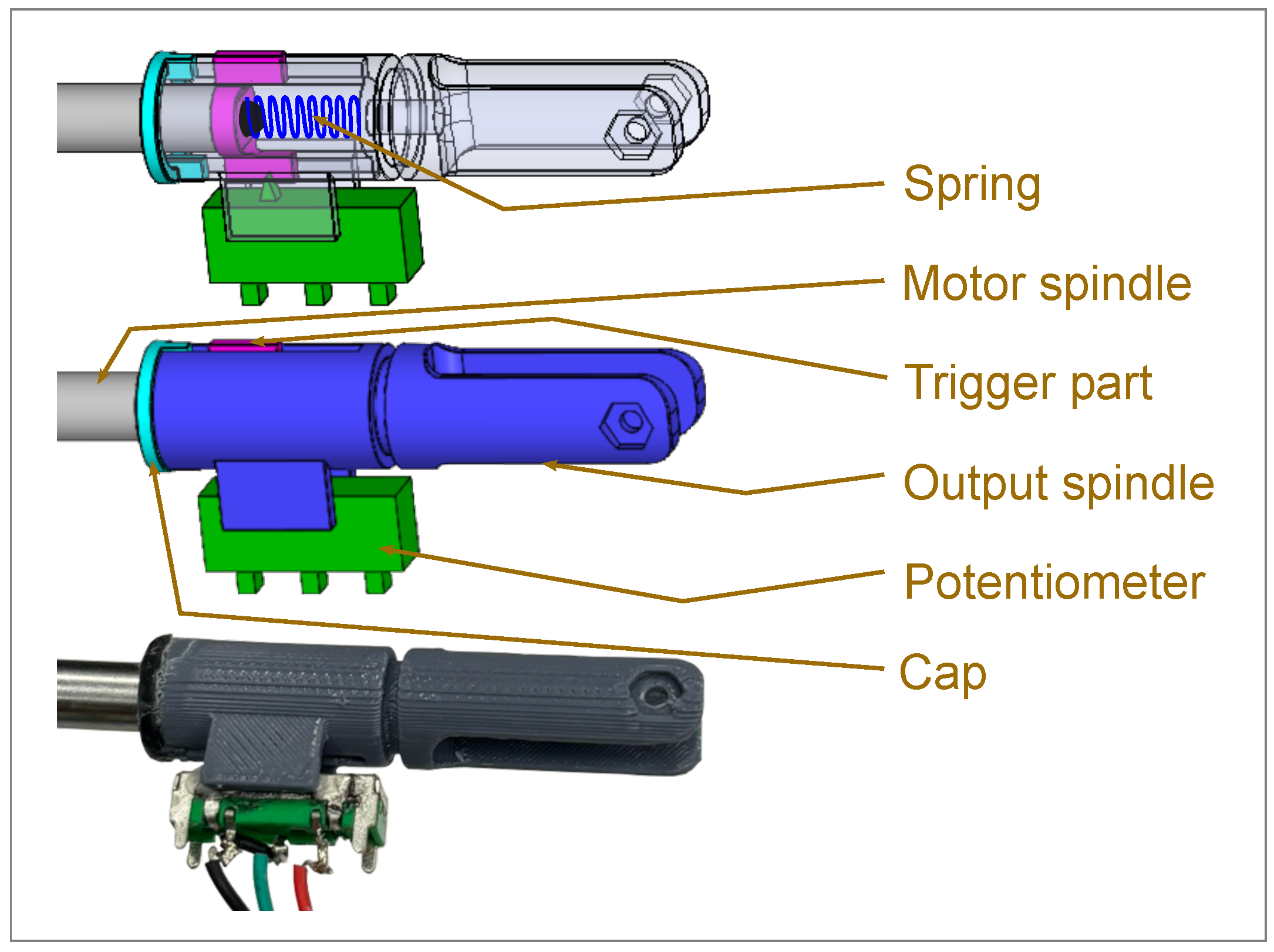
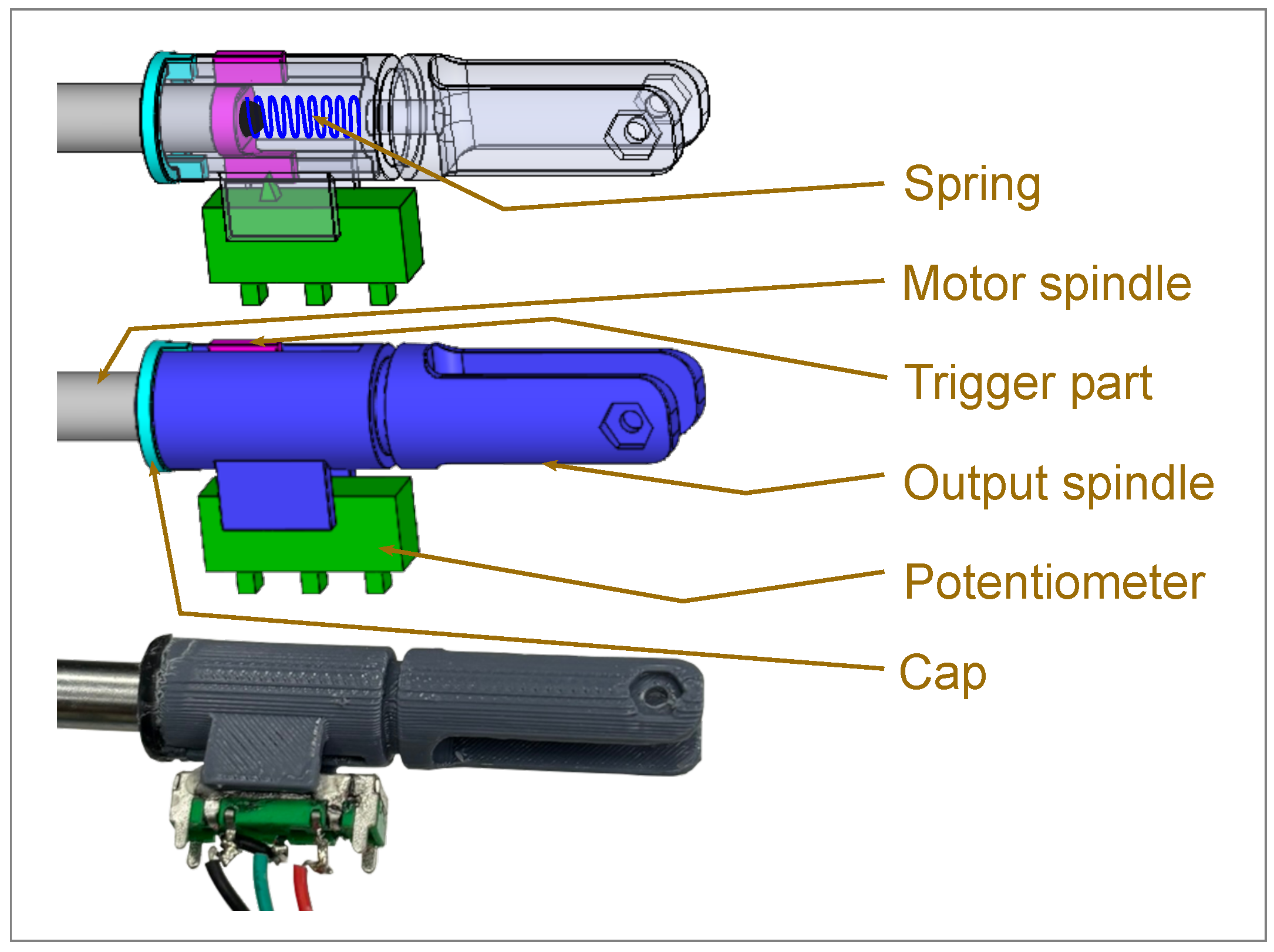
2.3.4. Force Sensor Design
2.3.5. Circuit Board Design
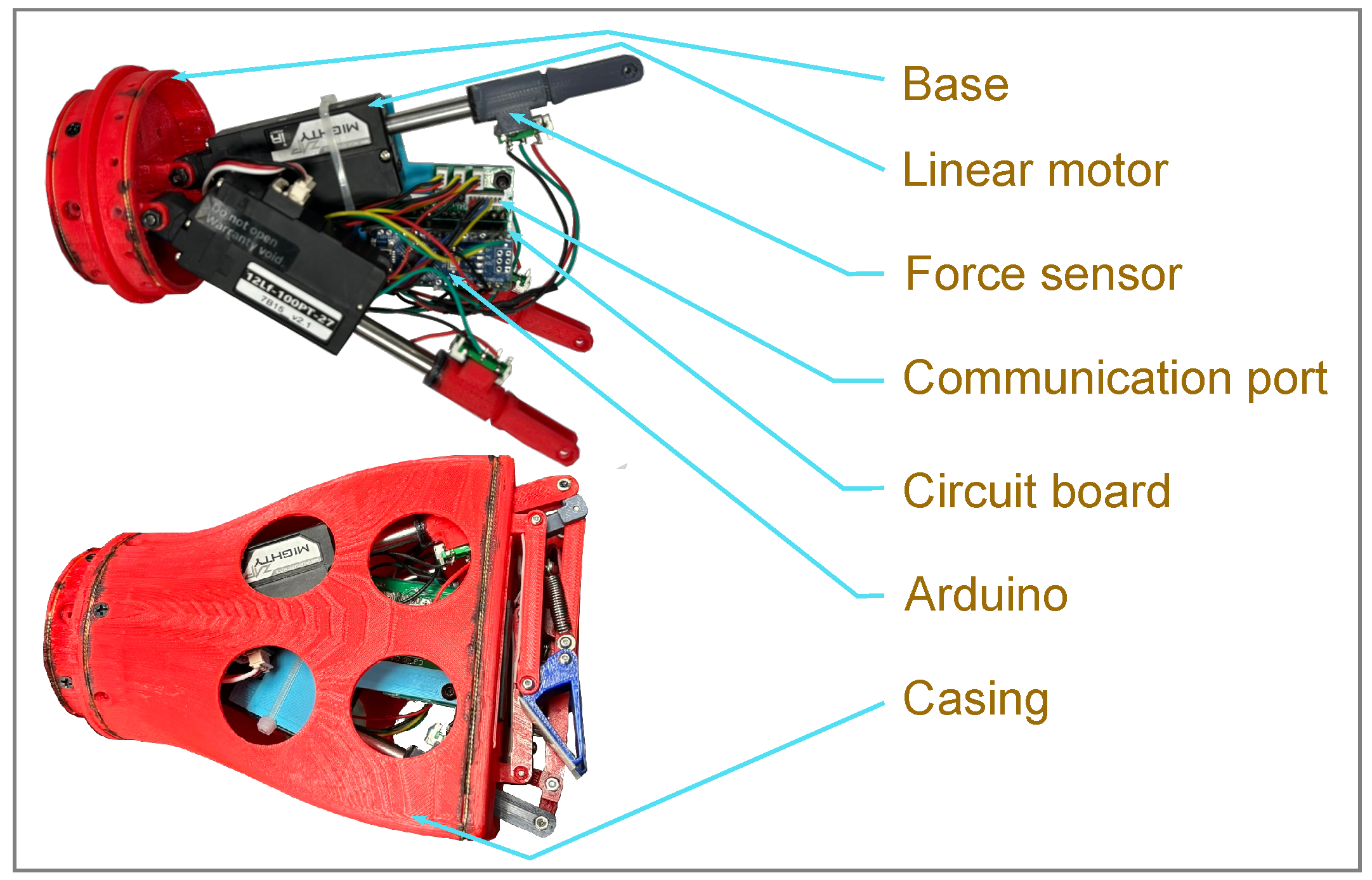
2.4. Manufacturing and Prototyping
3. Experimental Study
3.1. Study Site and Participants
3.2. Experimental Setup
3.3. Data Collection Furthermore, Evaluation Criteria
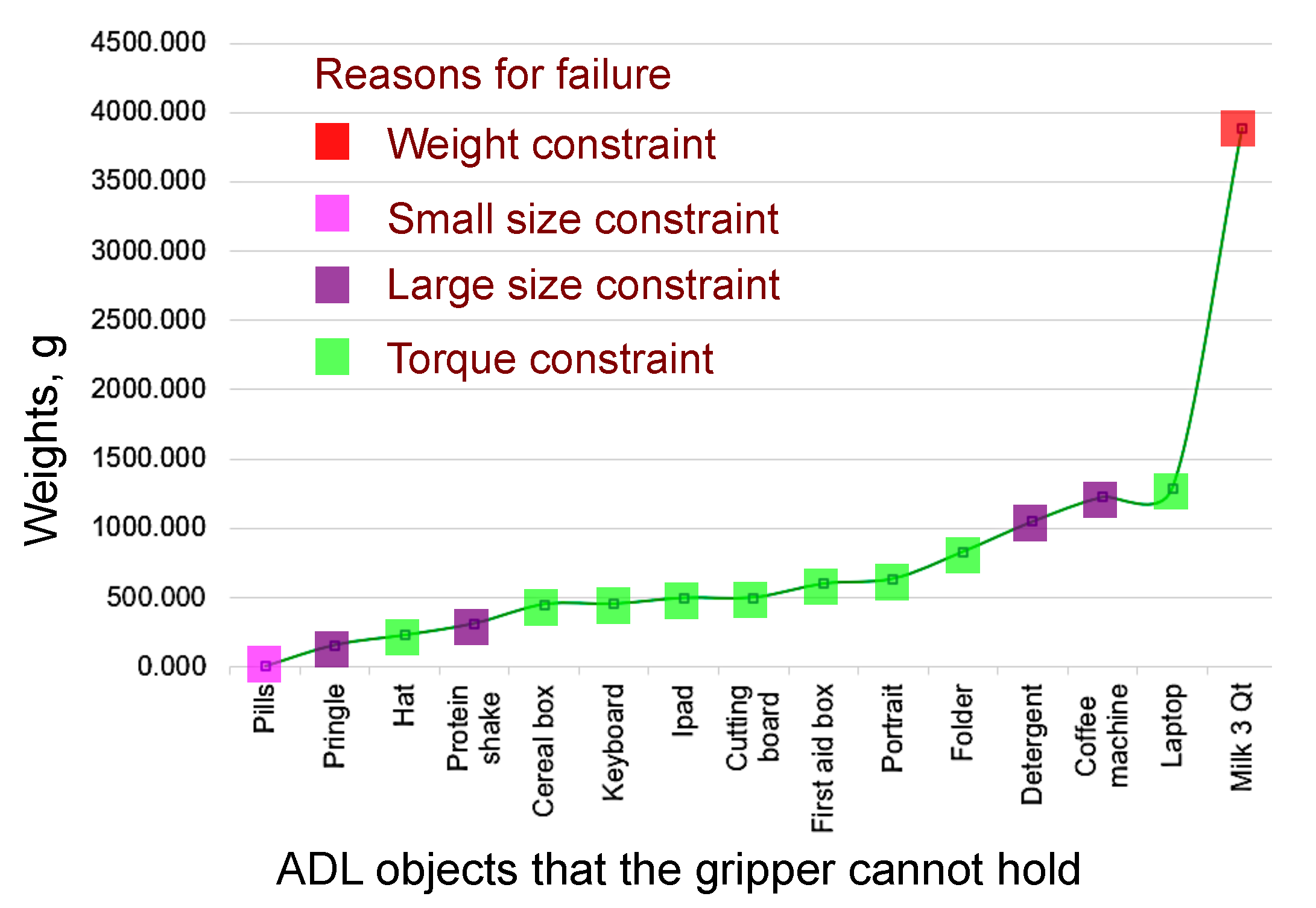
3.4. Load Test
3.5. Usability Test of the Gripper
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sitruk-Ware, R.; Bonsack, B.; Brinton, R.; Schumacher, M.; Kumar, N.; Lee, J.Y.; Castelli, V.; Corey, S.; Coats, A.; Sadanandan, N.; et al. Progress in progestin-based therapies for neurological disorders. Neurosci. Biobehav. Rev. 2021, 122, 38–65. [Google Scholar] [CrossRef]
- Cai, Y.; Tian, Q.; Gross, A.L.; Wang, H.; E, J.Y.; Agrawal, Y.; Simonsick, E.M.; Ferrucci, L.; Schrack, J.A. Motor and physical function impairments as contributors to slow gait speed and mobility difficulty in middle-aged and older adults. J. Gerontol. Ser. 2022, 77, 1620–1628. [Google Scholar] [CrossRef]
- Spinal Cord Injury Prevalence in the U.S.|Christopher & Dana Reeve Foundation. 2023. Available online: https://www.christopherreeve.org/todays-care/paralysis-help-overview/stats-about-paralysis (accessed on 28 November 2023).
- Disability Impacts All of Us Infographic|Centers for Disease Control and Prevention. 2023. Available online: https://www.cdc.gov/ncbddd/disabilityandhealth/infographic-disability-impacts-all.html (accessed on 29 November 2023).
- Travel Patterns of American Adults with Disabilities|Bureau of Transportation Statistics. 2023. Available online: https://www.bts.gov/travel-patterns-with-disabilities (accessed on 28 November 2023).
- Allen, S.; Resnik, L.; Roy, J. Promoting independence for wheelchair users: The role of home accommodations. Gerontologist 2006, 46, 115–123. [Google Scholar] [CrossRef]
- Thomas, L.B. Practitioner Toolkit: Assessing Activities of Daily Living (ADLs), Instrumental Activities of Daily Living (IADLs), and Functional Status. Rehabil. Prof. 2023, 31, 55. [Google Scholar]
- Sharif, H.; Eslaminia, A.; Chembrammel, P.; Kesavadas, T. Classification of activities of daily living based on grasp dynamics obtained from a leap motion controller. Sensors 2022, 22, 8273. [Google Scholar] [CrossRef]
- Bar-On, I.; Mayo, G.; Levy-Tzedek, S. Socially Assistive Robots for Parkinson’s Disease: Needs, Attitudes and Specific Applications as Identified by Healthcare Professionals. Acm Trans. Hum. Robot Interact. 2023, 12, 1–25. [Google Scholar] [CrossRef]
- Mobility Device Statistics: United States|Disabled World. 2023. Available online: https://www.disabled-world.com/disability/statistics/mobility-stats.php (accessed on 28 November 2023).
- Liu, C.; Cheng, J.; Li, Z.; Cheng, C.; Zhang, C.; Zhang, Y.; Zhong, R.Y. Design of a self-adaptive gripper with rigid fingers for Industrial Internet. Robot. Comput. Integr. Manuf. 2020, 65, 101976. [Google Scholar] [CrossRef]
- Suebsomran, A. Development of Robot Gripper and Force Control. In Proceedings of the 2018 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 433–437. [Google Scholar]
- Wang, Z.; Torigoe, Y.; Hirai, S. A prestressed soft gripper: Design, modeling, fabrication, and tests for food handling. IEEE Robot. Autom. Lett. 2017, 2, 1909–1916. [Google Scholar] [CrossRef]
- Birglen, L.; Schlicht, T. A statistical review of industrial robotic grippers. Robot. Comput. Integr. Manuf. 2018, 49, 88–97. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Li, L.; Meng, Y.; Tian, Y. Load sharing design of a multi-legged adaptable gripper with Gecko-inspired controllable adhesion. IEEE Robot. Autom. Lett. 2021, 6, 8482–8489. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Yang, Y.; Li, Y. Soft robotic grippers based on particle transmission. IEEE/ASME Trans. Mechatron. 2019, 24, 969–978. [Google Scholar] [CrossRef]
- Liu, C.H.; Chung, F.M.; Chen, Y.; Chiu, C.H.; Chen, T.L. Optimal design of a motor-driven three-finger soft robotic gripper. IEEE/ASME Trans. Mechatron. 2020, 25, 1830–1840. [Google Scholar] [CrossRef]
- Lee, W.c.; Wu, C.W. Design and analysis of a novel robotic gripper integrated with a three-phalanx finger. Proc. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2014, 228, 1786–1796. [Google Scholar] [CrossRef]
- Makiyama, Y.; Wang, Z.; Hirai, S. A pneumatic needle gripper for handling shredded food products. In Proceedings of the 2020 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Asahikawa, Japan, 28–29 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 183–187. [Google Scholar]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Hwang, G.; Park, J.; Cortes, D.S.D.; Hyeon, K.; Kyung, K.U. Electroadhesion-based high-payload soft gripper with mechanically strengthened structure. IEEE Trans. Ind. Electron. 2021, 69, 642–651. [Google Scholar] [CrossRef]
- Samadikhoshkho, Z.; Zareinia, K.; Janabi-Sharifi, F. A brief review on robotic grippers classifications. In Proceedings of the 2019 IEEE Canadian Conference of Electrical and Computer Engineering (CCECE), Edmonton, AB, Canada, 5–8 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar]
- Kashef, S.R.; Amini, S.; Akbarzadeh, A. Robotic hand: A review on linkage-driven finger mechanisms of prosthetic hands and evaluation of the performance criteria. Mech. Mach. Theory 2020, 145, 103677. [Google Scholar] [CrossRef]
- Nassar, F.; Birglen, L. Force analysis of minimal self-adaptive fingers using variations of four-bar linkages. Mech. Sci. 2021, 12, 1037–1049. [Google Scholar] [CrossRef]
- Kim, Y.J.; Song, H.; Maeng, C.Y. BLT gripper: An adaptive gripper with active transition capability between precise pinch and compliant grasp. IEEE Robot. Autom. Lett. 2020, 5, 5518–5525. [Google Scholar] [CrossRef]
- Hernandez, J.R. Design, Development, and Control of a Robotic Gripper for Activities of Daily Living (ADL) Assistance. Master’s Thesis, University of Wisconsin-Milwaukee, Milwaukee, WI, USA, 2022. [Google Scholar]
- Babin, V.; Gosselin, C. Mechanisms for robotic grasping and manipulation. Annu. Rev. Control. Robot. Auton. Syst. 2021, 4, 573–593. [Google Scholar] [CrossRef]
- Liu, S.; Wang, F.; Liu, Z.; Zhang, W.; Tian, Y.; Zhang, D. A two-finger soft-robotic gripper with enveloping and pinching grasping modes. IEEE/ASME Trans. Mechatron. 2020, 26, 146–155. [Google Scholar] [CrossRef]
- What is PLA? (Everything You Need To Know)|TWI. 2023. Available online: https://www.twi-global.com/technical-knowledge/faqs/what-is-pla (accessed on 28 November 2023).
- Zhao, X.; Hu, H.; Wang, X.; Yu, X.; Zhou, W.; Peng, S. Super tough poly (lactic acid) blends: A comprehensive review. RSC Adv. 2020, 10, 13316–13368. [Google Scholar] [CrossRef]
- Chen, T.C.T. 3D Printing and Ubiquitous Manufacturing; Springer: Cham, Germany, 2020. [Google Scholar]
- Microsoft Word—DataSheet_12Lf-xxPT-27_V1.2. Available online: https://mm.digikey.com/Volume0/opasdata/d220001/medias/docus/4029/12Lf-xxPT-27_V1.2.pdf (accessed on 29 November 2023).
- Tiboni, M.; Borboni, A.; Vérité, F.; Bregoli, C.; Amici, C. Sensors and actuation technologies in exoskeletons: A review. Sensors 2022, 22, 884. [Google Scholar] [CrossRef]
- Arduino Nano|Arduino. 2023. Available online: https://store.arduino.cc/products/arduino-nano (accessed on 28 November 2023).
- DC-DC Converter 24V to 12V Step Down Power Supply Module DC 7–32V Input QS-2405CCBD-12A. 2024. Available online: https://www.qskj.cc/shop/dc-dc-converter-24v-to-12v-step-down-power-supply-module-dc-7-32v-input-qs-2405ccbd-12a-6688 (accessed on 30 March 2024).
- Birglen, L.; Gosselin, C.M. Geometric design of three-phalanx underactuated fingers. J. Mech. Des. 2006, 128, 356–364. [Google Scholar] [CrossRef]
- Ceccarelli, M.; Rodriguez, N.E.N.; Carbone, G. Design and tests of a three finger hand with 1-DOF articulated fingers. Robotica 2006, 24, 183–196. [Google Scholar] [CrossRef]
- 12LF-100PT-27|DigiKey Electronics. 2023. Available online: https://www.digikey.com/en/products/detail/mightyzap/12LF-100PT-27/13681519 (accessed on 28 November 2023).
- Asadi, F. Serial Communication. In Essentials of Arduino™ Boards Programming: Step-by-Step Guide to Master Arduino Boards Hardware and Software; Springer: Berkeley, CA, USA, 2023; pp. 179–199. [Google Scholar]
- Rahman, M.M.; Sharia, M.T.; Zarif, M.I.I.; Haque, M.E.; Ahmamed, S.I.; Ghommam, J.; Wang, I.; Ahmed, H.U.; Rahman, M. Performance Assessment of 3-Finger Adaptive Robotic Grippers in Handling Objects for Daily Living Assistance. In Proceedings of the ACRM Annual Conference 2023, Dallas, TX, USA, 31 October–3 November 2023. [Google Scholar]
- Lee, K.; Wang, Y.; Zheng, C. Twister hand: Underactuated robotic gripper inspired by origami twisted tower. IEEE Trans. Robot. 2020, 36, 488–500. [Google Scholar] [CrossRef]
- Lu, Q.; Clark, A.B.; Shen, M.; Rojas, N. An origami-inspired variable friction surface for increasing the dexterity of robotic grippers. IEEE Robot. Autom. Lett. 2020, 5, 2538–2545. [Google Scholar] [CrossRef]
- Nie, K.; Wan, W.; Harada, K. A hand combining two simple grippers to pick up and arrange objects for assembly. IEEE Robot. Autom. Lett. 2019, 4, 958–965. [Google Scholar] [CrossRef]
- Hussain, I.; Renda, F.; Iqbal, Z.; Malvezzi, M.; Salvietti, G.; Seneviratne, L.; Gan, D.; Prattichizzo, D. Modeling and prototyping of an underactuated gripper exploiting joint compliance and modularity. IEEE Robot. Autom. Lett. 2018, 3, 2854–2861. [Google Scholar] [CrossRef]
- Tlegenov, Y.; Telegenov, K.; Shintemirov, A. An open-source 3D printed underactuated robotic gripper. In Proceedings of the 2014 IEEE/ASME 10th International Conference on Mechatronic and Embedded Systems and Applications (MESA), Senigallia, Italy, 10–12 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6. [Google Scholar]








| ADL Objects (Italics Are Failed in Grasping) | Weight Ranges |
|---|---|
| USB memory, Earrings, Tea bags, Tic tac box, Necklace, Toilet paper, Ruler, Credit/Debit card, Glue, Tacos, Bookmarker, Glasses, Pair of socks, Bag of chips, Popcorn, bag, Sharpener, Phone charger, Cereal box, Toothbrush, Earphones, Pencil, Wallet, Pen, Table lamp | Very light (1 g to 49 g) |
| Fruit peeler, Scissors, Highlighter, Hand watch, Remote control, Mouse, Deodorant, Hat, Lipstick, Avocado, Artificial apple, Marker, Plum, French fries, Eraser, Hard drive, iPod, Pills, Slice of pizza, Stapler, Pringle, Peach, Plum, French fries, Eraser, Hard drive | Light (50 g to 299 g) |
| Protein shake, Power bank, Shoe, Ketchup, Bag, Knife, Tomatoes can, Umbrella, Keyboard, Mouse pad, iPad, Cutting board, Moisturizer, First aid box, Portrait, Folder, Diary | Medium (300 g to 999 g) |
| Desk phone, Milk 1 Qt bottle, Detergent, Mouthwash, Coffee machine, Laptop, Blanket, Book, Milk 3 Qt | Heavy (1000 g to 4000 g) |
| Robotic Grippers | Grippers’ Characteristics | Number of Success ADL Objects |
|---|---|---|
| Li et al. [15] | Multiple legged; Gecko-inspired adhesion gripper | 3 (steel plate, soccer ball, and glass) |
| Lee et al. [41] | 3 fingers; Origami inspired; Flexible and rigid polymer composite; Central servomotor; Cable driven; Underactuated fingers | 3 (fabrics, clementine, egg, and rubik’s cube) |
| BLT Gripper [25] | 3 fingers; Fexible belt materials with high-stiffness; ABS structure | 3 (driller, pencil, and tape) |
| Lu et al. [42] | 2 fingers; 1 DoF in each finger; Variable friction surface; ABS/TPU material; 2 Dc motors for changing the friction; 2 servo motors for the fingers; Clamp/clip mechanism | 7 (custom objects prepared for the experiments) |
| Li et al. [16] | 2 fingers; Soft gripper; It pick and arrange small objects | 4 (pliers, tape, haptic device, and screwdriver) |
| Nie et al. [43] | It combines 2 grippers: Inner gripper and outer gripper; 2 fingers in each; | 5 (screw, washer, tape, pully, and peg) |
| Hussain et al. [44] | 2 fingers; ABS material; Serrvo motor controlled; Underactuated fingers; Tendon-driven | 4 (cup, tennis ball, and small box) |
| Tlegenov et al. [45] | 3 fingers; 3D printed; Thermoplastic elastomer (TPE)/PLA/ABS; Central servo motor; Underactuated fingers; No force feedback | 4 (pencil, bottle, witheboard eraser, and ball) |
| Proposed gripper | 3 finger; 3D printed; Underactuated fingers; Force feed back; Customized force sensor; Cylindrical, parallel, and partial spherical; Fingers are fully closed at idle | 75 (Table 2) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.M.; Shahria, M.T.; Sunny, M.S.H.; Khan, M.M.R.; Islam, E.; Swapnil, A.A.Z.; Bedolla-Martínez, D.; Rahman, M.H. Development of a Three-Finger Adaptive Robotic Gripper to Assist Activities of Daily Living. Designs 2024, 8, 35. https://doi.org/10.3390/designs8020035
Rahman MM, Shahria MT, Sunny MSH, Khan MMR, Islam E, Swapnil AAZ, Bedolla-Martínez D, Rahman MH. Development of a Three-Finger Adaptive Robotic Gripper to Assist Activities of Daily Living. Designs. 2024; 8(2):35. https://doi.org/10.3390/designs8020035
Chicago/Turabian StyleRahman, Md Mahbubur, Md Tanzil Shahria, Md Samiul Haque Sunny, Md Mahafuzur Rahaman Khan, Emroze Islam, Asif Al Zubayer Swapnil, David Bedolla-Martínez, and Mohammad H Rahman. 2024. "Development of a Three-Finger Adaptive Robotic Gripper to Assist Activities of Daily Living" Designs 8, no. 2: 35. https://doi.org/10.3390/designs8020035
APA StyleRahman, M. M., Shahria, M. T., Sunny, M. S. H., Khan, M. M. R., Islam, E., Swapnil, A. A. Z., Bedolla-Martínez, D., & Rahman, M. H. (2024). Development of a Three-Finger Adaptive Robotic Gripper to Assist Activities of Daily Living. Designs, 8(2), 35. https://doi.org/10.3390/designs8020035