Multi-Camera-Based Person Recognition System for Autonomous Tractors


Abstract
:1. Introduction
2. Materials and Methods
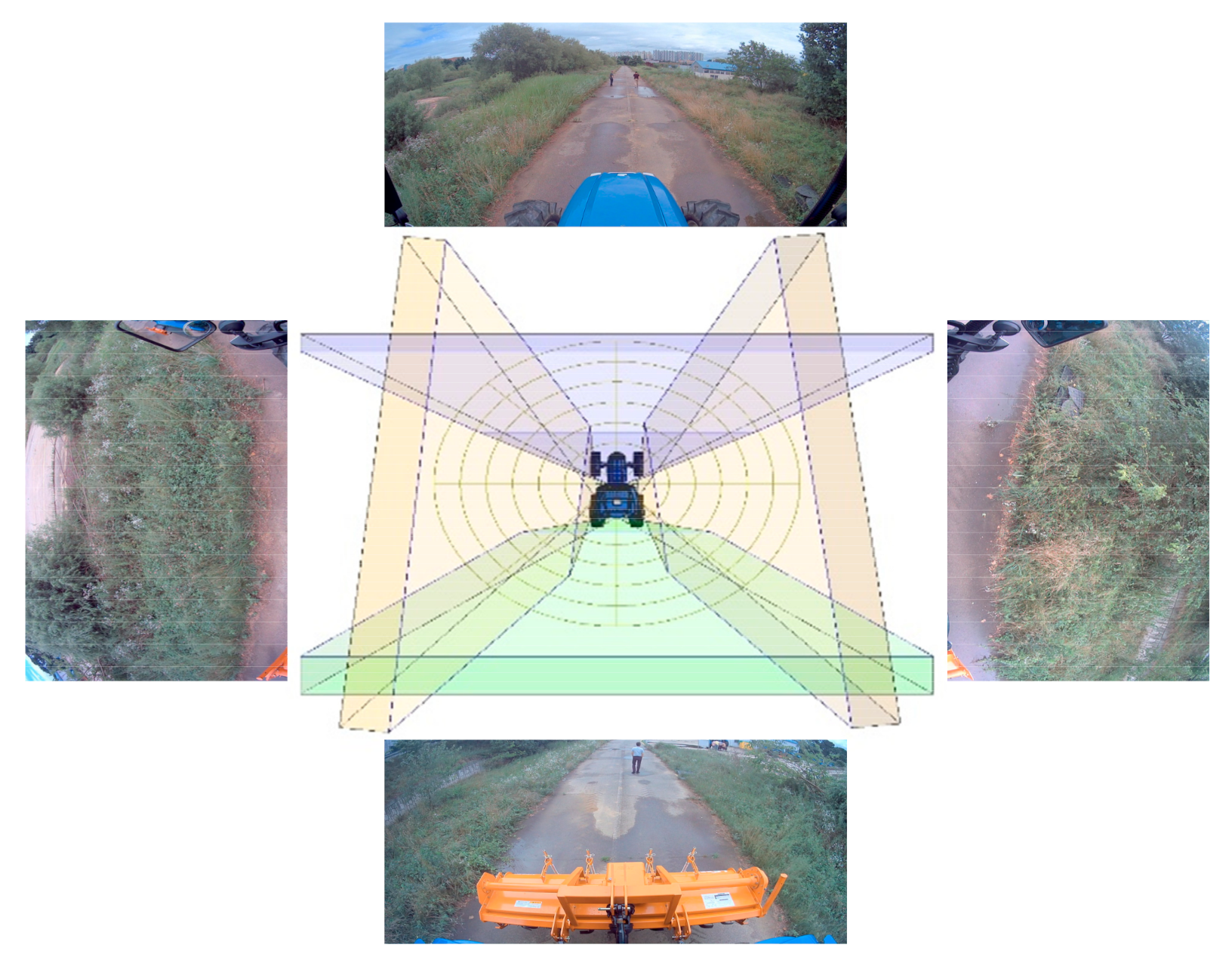
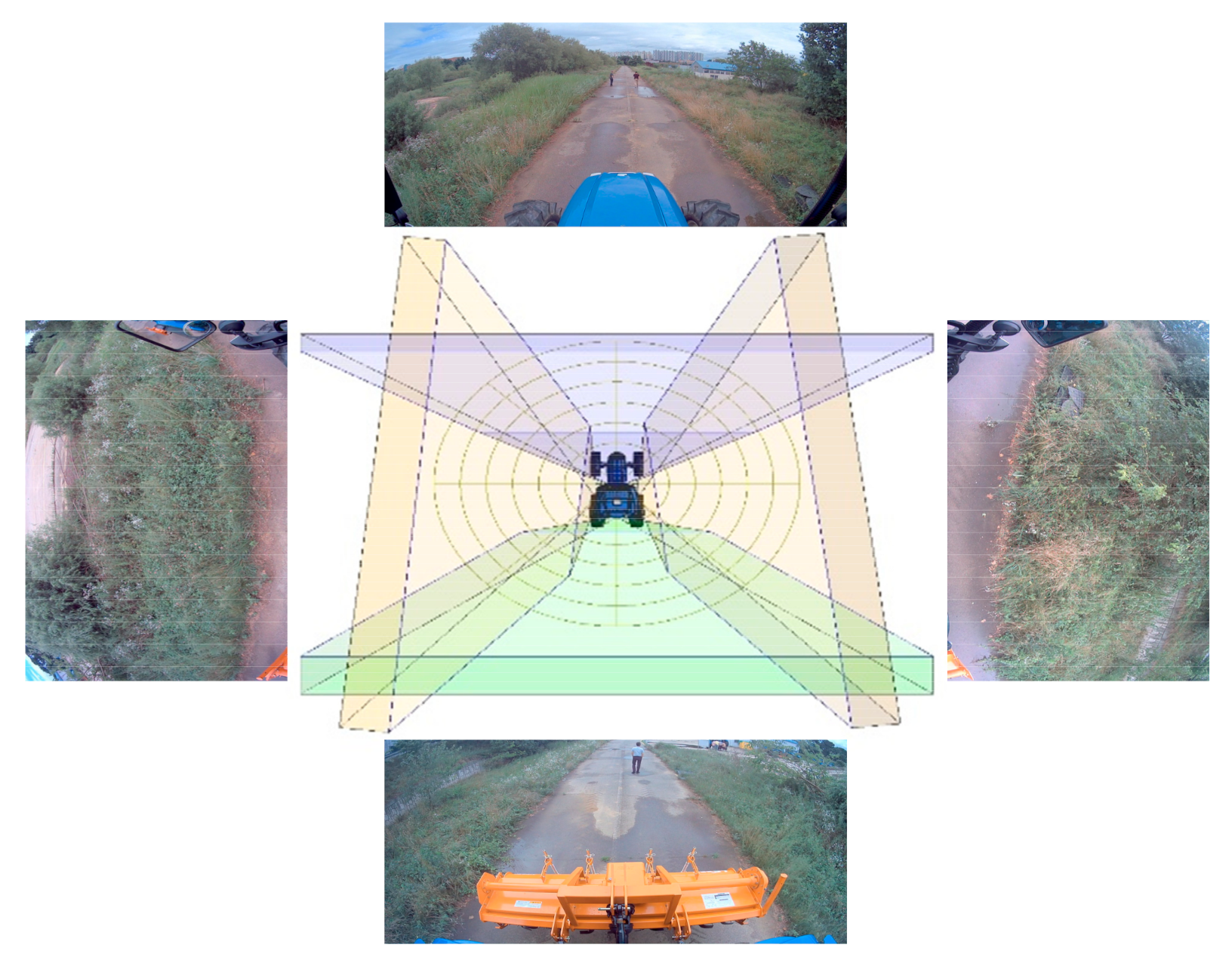
2.1. Autonomous Tractor Vision System
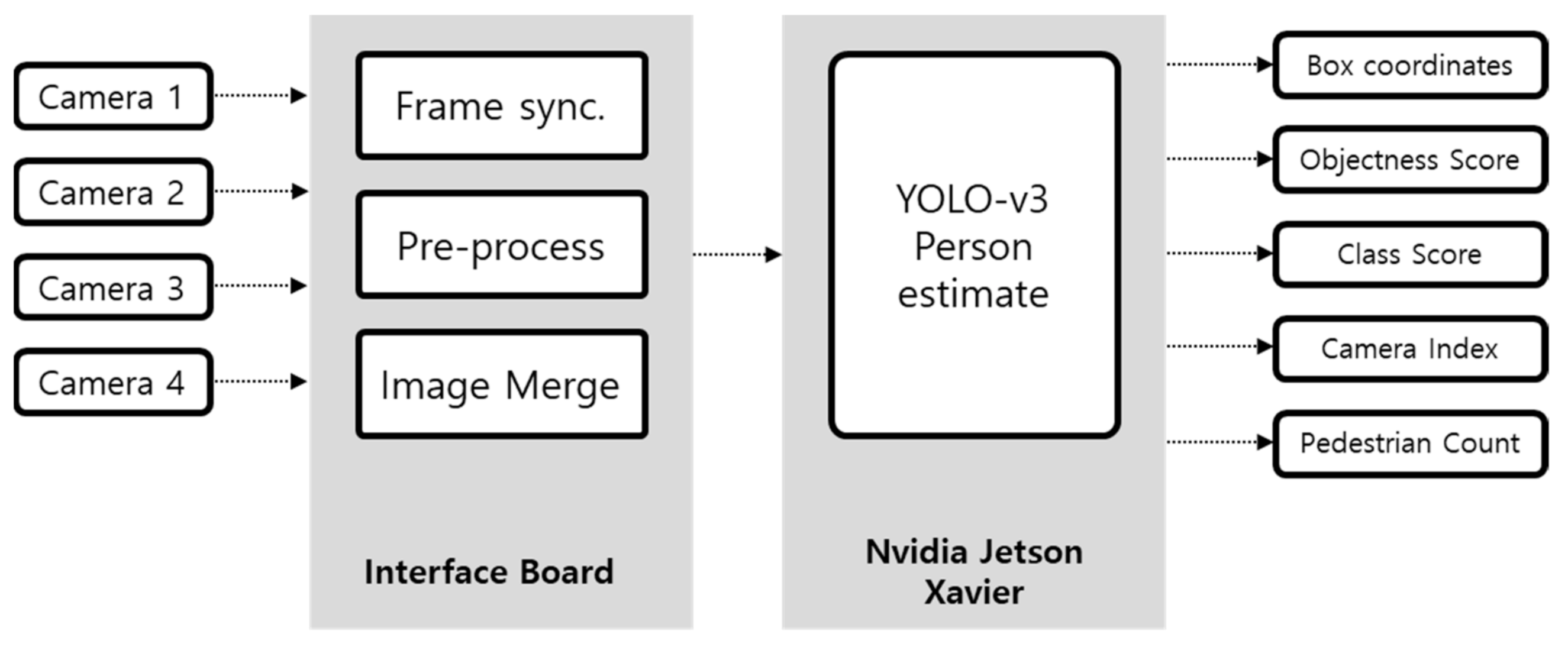
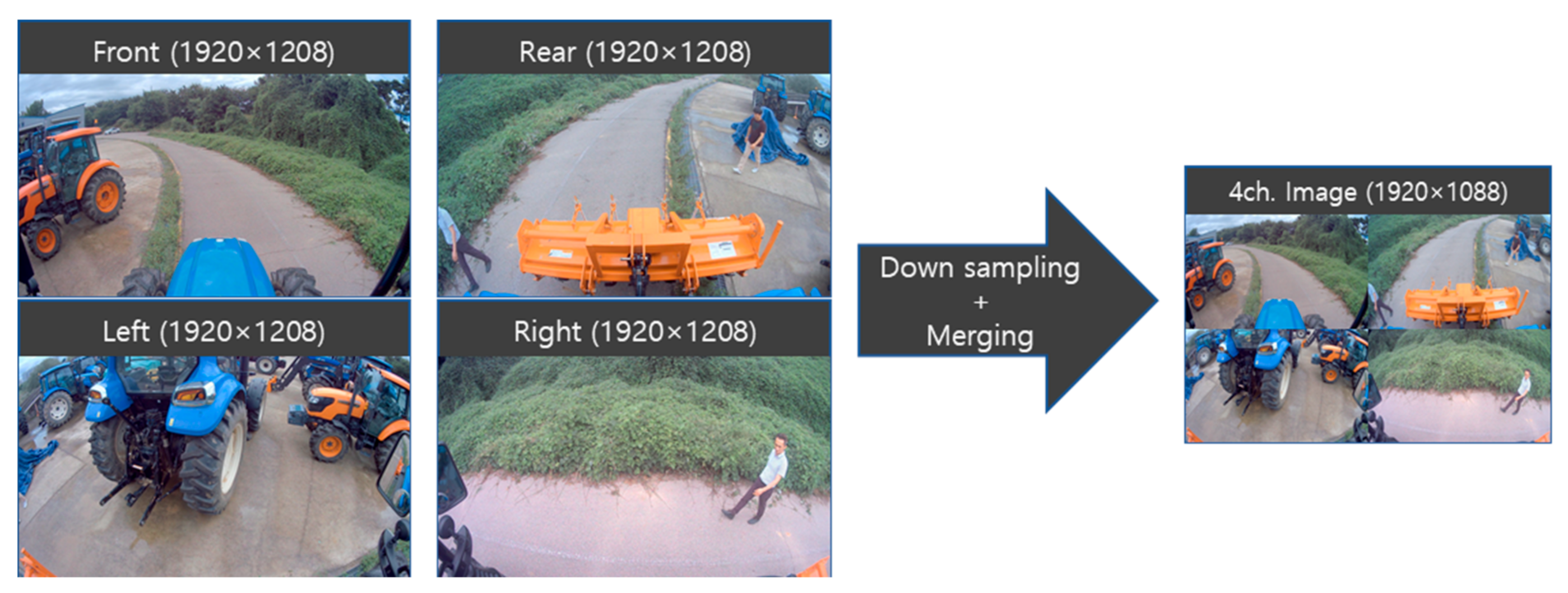
2.2. Person Recognition System
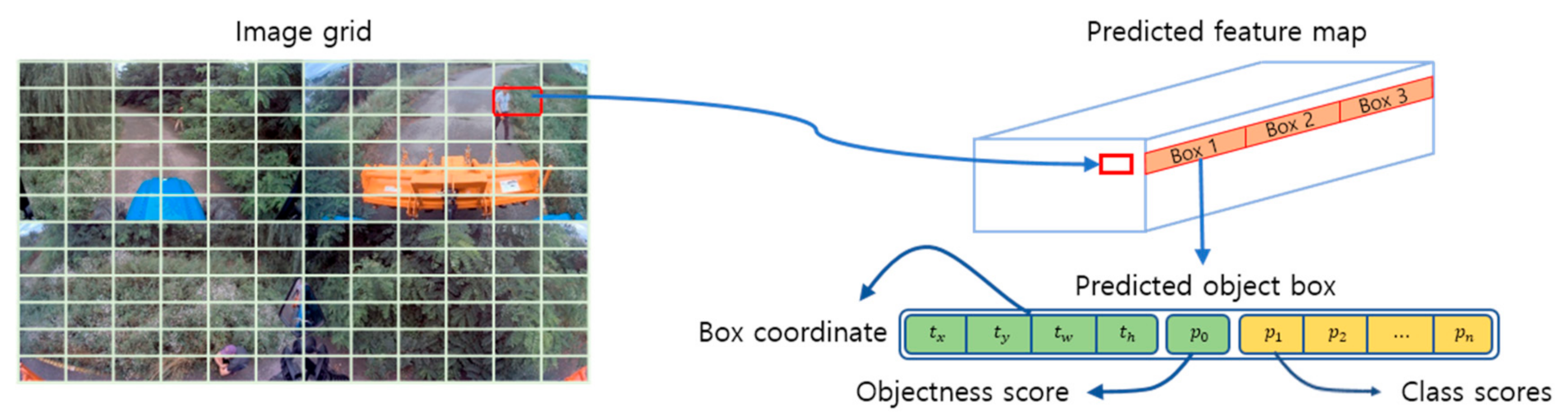
2.3. Person Recognition Algorithm with YOLO-v3
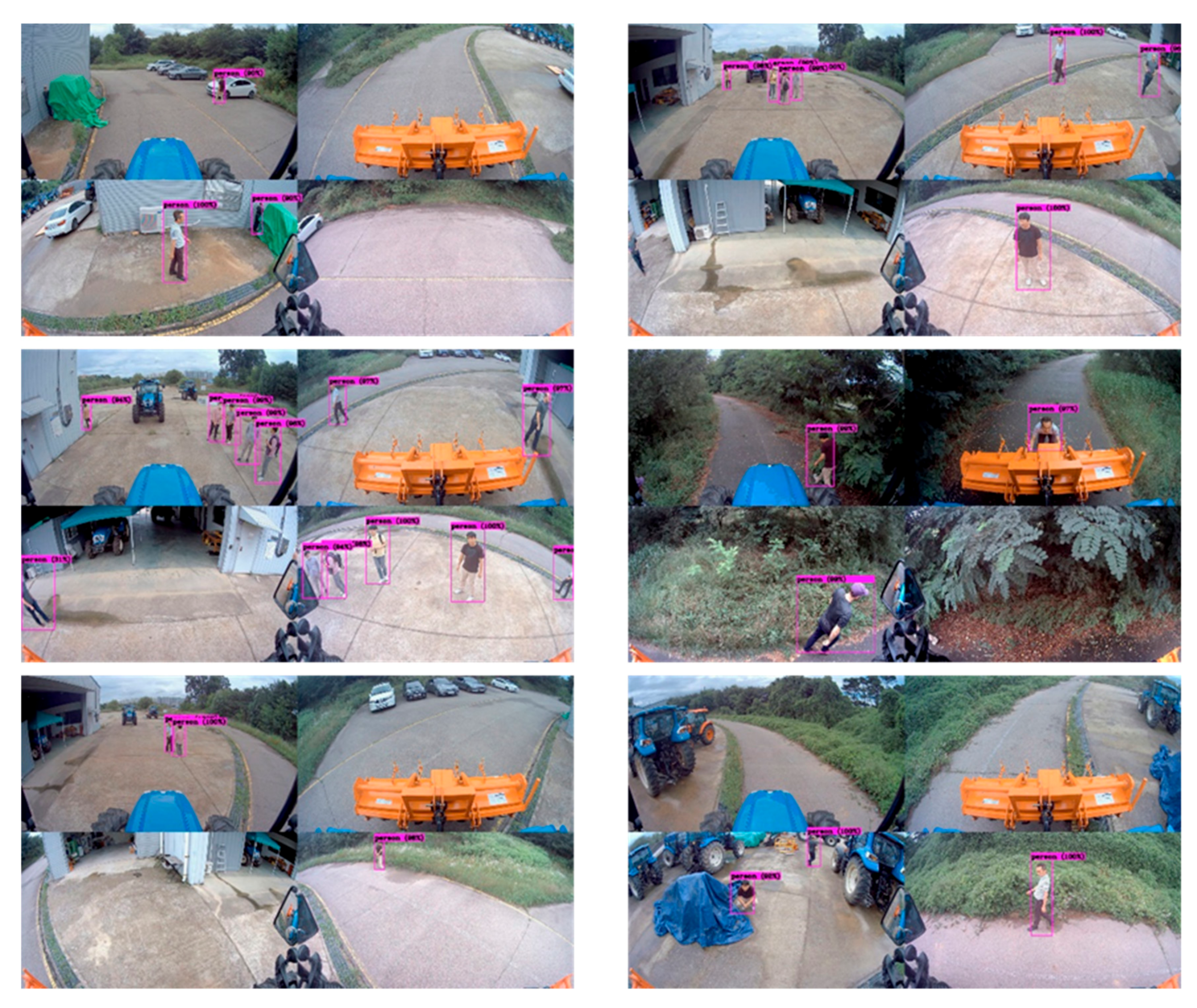
3. Results
3.1. Data Acquisition
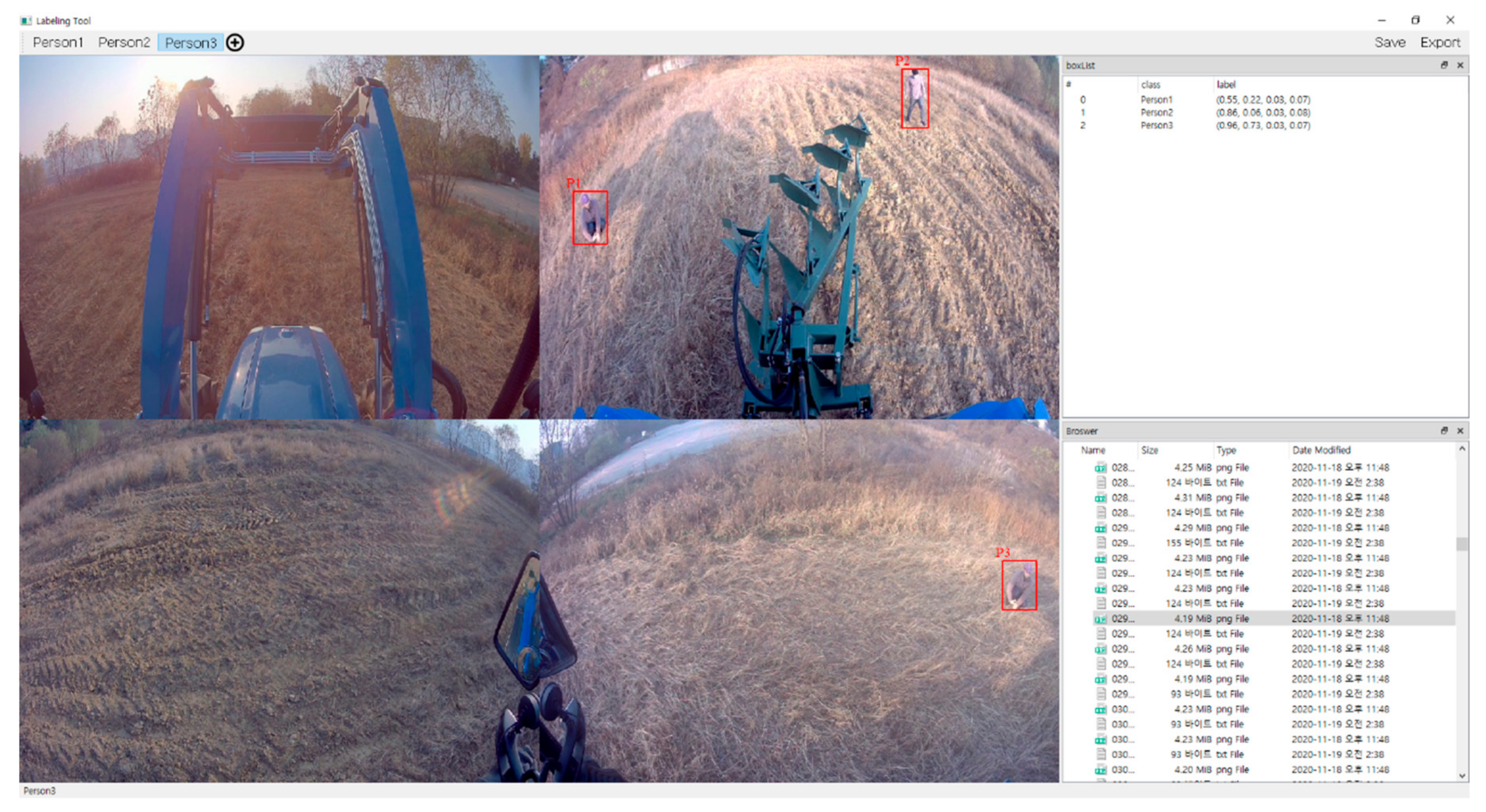
3.2. Data Annotation
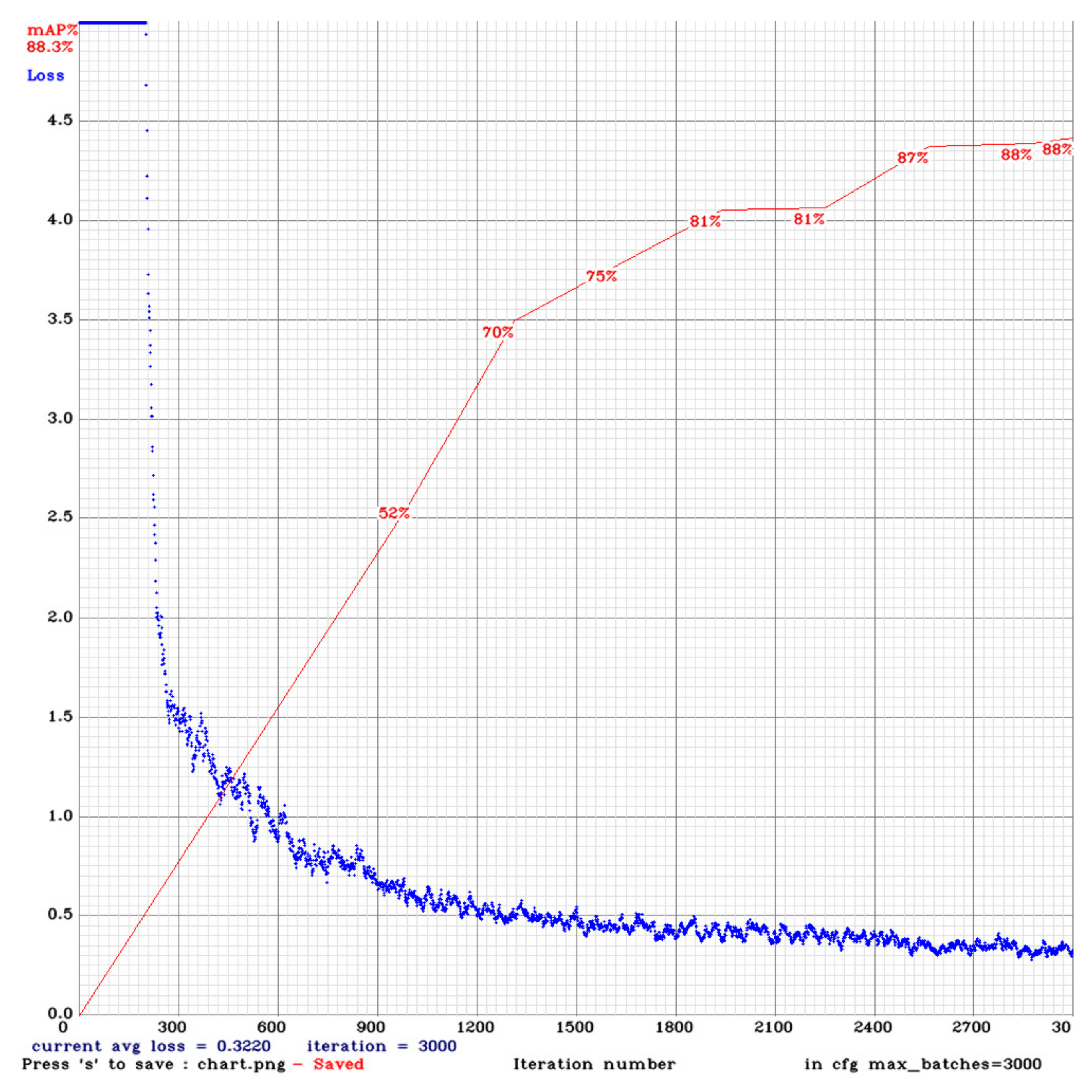
3.3. Training Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Brown, M. Smart farming—Automated and Connected Agriculture. Engineering.com, 2018. Available online: https://www.engineering.com/DesignerEdge/DesignerEdgeArticles/ArticleID/16653/Smart-FarmingAutomated-and-Connected-Agriculture.aspx (accessed on 13 November 2020).
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Viola, P.; Jones, M.J.C. Rapid object detection using a boosted cascade of simple features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2001), Kauai, HI, USA, 8–14 December 2001; Volume 1, p. 3. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of Oriented Gradients for Human Detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 886–893. [Google Scholar]
- Felzenszwalb, P.F.; Girshick, R.B.; McAllester, D.; Ramanan, D. Object Detection with Discriminatively Trained Part-Based Models. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1627–1645. [Google Scholar] [CrossRef] [Green Version]
- Noble, W.S. What is a support vector machine? Nat. Biotechnol. 2006, 24, 1565–1567. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. In Proceedings of the IEEE, Anchorage, AK, USA, 4–9 May 1998; pp. 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Bargoti, S.; Underwood, J. Deep fruit detection in orchards. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, Singapore, 29 May–3 June 2017; pp. 3626–3633. [Google Scholar] [CrossRef] [Green Version]
- Kragh, M.; Christiansen, P.; Laursen, M.S.; Steen, K.A.; Green, O.; Karstoft, H.; Jørgensen, R.N. FieldSAFE: Dataset for Obstacle Detection in Agriculture. Sensors 2017, 17, 2579. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zheng, Y.-Y.; Kong, J.-L.; Jin, X.-B.; Wang, X.-Y.; Zuo, M. CropDeep: The Crop Vision Dataset for Deep-Learning-Based Classification and Detection in Precision Agriculture. Sensors 2019, 19, 1058. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, Z.; Yu, W.; Liang, P.; Guo, H.; Xia, L.; Zhang, F.; Ma, Y.; Ma, J. Deep transfer learning for military object recognition under small training set condition. Neural Comput. Appl. 2018, 31, 6469–6478. [Google Scholar] [CrossRef]
- Feng, C.; Liu, M.-Y.; Kao, C.-C.; Lee, T.-Y. Deep Active Learning for Civil Infrastructure Defect Detection and Classification. In Computing in Civil Engineering 2017, Proceedings of the ASCE International Workshop on Computing in Civil Engineering 2017, Seattle, WA, USA, 25–27 June 2017; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2017; pp. 298–306. [Google Scholar]
- Xu, J. A deep learning approach to building an intelligent video surveillance system. Multimed. Tools Appl. 2020, 1–21. [Google Scholar] [CrossRef]
- Liu, X.; Liu, W.; Mei, T.; Ma, H. A Deep Learning-Based Approach to Progressive Vehicle Re-identification for Urban Surveillance. In Proceedings of the Provable and Practical Security; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2016; pp. 869–884. [Google Scholar]
- Wu, B.; Wan, A.; Iandola, F.; Jin, P.H.; Keutzer, K. SqueezeDet: Unified, Small, Low Power Fully Convolutional Neural Networks for Real-Time Object Detection for Autonomous Driving. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Honolulu, HI, USA, 21–26 July 2017; pp. 446–454. [Google Scholar]
- Feng, D.; Haase-Schutz, C.; Rosenbaum, L.; Hertlein, H.; Glaser, C.; Timm, F.; Wiesbeck, W.; Dietmayer, K. Deep Multi-Modal Object Detection and Semantic Segmentation for Autonomous Driving: Datasets, Methods, and Challenges. IEEE Trans. Intell. Transp. Syst. 2020, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Uçar, A.; Demir, Y.; Güzeliş, C. Object recognition and detection with deep learning for autonomous driving applications. Simulation 2017, 93, 759–769. [Google Scholar] [CrossRef]
- Ferdowsi, A.; Challita, U.; Saad, W. Deep Learning for Reliable Mobile Edge Analytics in Intelligent Transportation Systems: An Overview. IEEE Veh. Technol. Mag. 2019, 14, 62–70. [Google Scholar] [CrossRef]
- Tsai, C.-C.; Tseng, C.-K.; Tang, H.-C.; Guo, J.-I. Vehicle Detection and Classification based on Deep Neural Network for Intelligent Transportation Applications. In Proceedings of the 2018 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC), Honolulu, HI, USA, 12–15 November 2018; pp. 1605–1608. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Wei, H.; Laszewski, M.; Kehtarnavaz, N. Deep Learning-Based Person Detection and Classification for Far Field Video Surveillance. In Proceedings of the 2018 IEEE 13th Dallas Circuits and Systems Conference, Dallas, TX, USA, 12 November 2018. [Google Scholar]
- Zhang, K.; Zhang, Z.; Li, Z.; Qiao, Y. Joint Face Detection and Alignment Using Multitask Cascaded Convolutional Networks. IEEE Signal Process. Lett. 2016, 23, 1499–1503. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Yu, Y.; Cai, Y.; Chen, X.; Chen, L.; Liu, Q. A Comparative Study of State-of-the-Art Deep Learning Algorithms for Vehicle Detection. IEEE Intell. Transp. Syst. Mag. 2019, 11, 82–95. [Google Scholar] [CrossRef]
- Arabi, S.; Haghighat, A.; Sharma, A. A deep-learning-based computer vision solution for construction vehicle detection. Comput. Aided Civ. Infrastruct. Eng. 2020, 35, 753–767. [Google Scholar] [CrossRef]
- Li, J.; Zhou, F.; Ye, T.; Li, J. Real-World Railway Traffic Detection Based on Faster Better Network. IEEE Access 2018, 6, 68730–68739. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; pp. 91–99. [Google Scholar]
- He, K.; Gkioxari, G.; Dollar, P.; Girshicket, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Sermanet, P.; Eigen, D.; Zhang, Z.; Mathieu, M.; Fergus, R.; LeCun, Y. Overfeat: Integrated recognition, localization and detection using convolutional networks. arXiv 1312.6229 2013. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings European Conference on Computer Vision, Cham, Switzerland, 29 December 2016; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- van Etten, A. You only look twice: Rapid multi-scale object detection in satellite imagery. arXiv 2018, arXiv:1805.09512. [Google Scholar]
- Qiu, Z.; Zhao, N.; Zhou, L.; Wang, M.; Yang, L.; Fang, H.; He, Y.; Liu, Y. Vision-Based Moving Obstacle Detection and Tracking in Paddy Field Using Improved Yolov3 and Deep SORT. Sensors 2020, 20, 4082. [Google Scholar] [CrossRef]
- Ball, D.; Upcroft, B.; Wyeth, G.; Corke, P.; English, A.; Ross, P.; Patten, T.; Fitch, R.; Sukkarieh, S.; Bate, A. Vision-based Obstacle Detection and Navigation for an Agricultural Robot. J. Field Robot. 2016, 33, 1107–1130. [Google Scholar] [CrossRef]
- Fleischmann, P.; Berns, K. A Stereo Vision Based Obstacle Detection System for Agricultural Applications. In Springer Tracts in Advanced Robotics; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2016; pp. 217–231. [Google Scholar]
- Ross, P.; English, A.; Ball, D.; Upcroft, B.; Wyeth, G.; Corke, P. Novelty-based visual obstacle detection in agriculture. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–5 June 2014; pp. 1699–1705. [Google Scholar] [CrossRef] [Green Version]
- Hughes, C.; Glavin, M.; Jones, E.; Denny, P. Wide-angle camera technology for automotive applications: A review. IET Intell. Transp. Syst. 2009, 3, 19–31. [Google Scholar] [CrossRef] [Green Version]
- Mittal, S. A Survey on optimized implementation of deep learning models on the NVIDIA Jetson platform. J. Syst. Arch. 2019, 97, 428–442. [Google Scholar] [CrossRef]
- Tzutalin. “LabelImg”. Git Code, 2015. Available online: https://github.com/tzutalin/labelImg (accessed on 6 March 2020).
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common objects in context. In Computer Vision–ECCV 2014; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2014; pp. 740–755. [Google Scholar]
- Powers, D.M.W. Evaluation: From precision, recall and F-measure to ROC, informedness, markedness and correlation. J. Mach. Learn. Technol. 2011, 2, 37–63. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Processing | Description |
|---|---|
| GPU | 512-core Volta GPU with Tensor Cores |
| CPU | 8-core ARM v8.2 64-bit CPU, 8MB L2 + 4MB L3 |
| Memory | 32GB 256-bit LPDDR4x | 137GB/s |
| Storage | 32GB eMMC 5.1 + SSD 256GB |
| DL Accelerator | (2x) NDVLA Engines |
| Vision Accelerator | 70-way VLIW Vision Processor |
| Encoder/Decoder | (2x) 4Kp60 | HEVC/(2x) 4Kp60 | 12-bit support |
| - | Predicted Label | ||
| True | False | ||
| True Label | True | TP (True Positive) | FN (False Negative) |
| False | FP (False Positive) | TN (True Negative) | |
| - | Predicted Label | ||
| Person | Non-Person | ||
| True Label | Person | 27,996 (0.86) | 4485 (0.14) |
| Non-Person | 3372 (0.11) | 29,109 (0.89) | |
| Precision | Recall | FPS (Average) | |
|---|---|---|---|
| Our YOLO-v3 | 86.19% | 88.43% | 15.7 |
| YOLO-v3 | 85.48% | 88.52% | 13.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, T.-H.; Cates, B.; Choi, I.-K.; Lee, S.-H.; Choi, J.-M. Multi-Camera-Based Person Recognition System for Autonomous Tractors. Designs 2020, 4, 54. https://doi.org/10.3390/designs4040054
Jung T-H, Cates B, Choi I-K, Lee S-H, Choi J-M. Multi-Camera-Based Person Recognition System for Autonomous Tractors. Designs. 2020; 4(4):54. https://doi.org/10.3390/designs4040054
Chicago/Turabian StyleJung, Taek-Hoon, Benjamin Cates, In-Kyo Choi, Sang-Heon Lee, and Jong-Min Choi. 2020. "Multi-Camera-Based Person Recognition System for Autonomous Tractors" Designs 4, no. 4: 54. https://doi.org/10.3390/designs4040054