An Efficient Testing Scheme for Power-Balanceability of Power System Including Controllable and Fluctuating Power Devices



Abstract
1. Introduction
2. System Overview
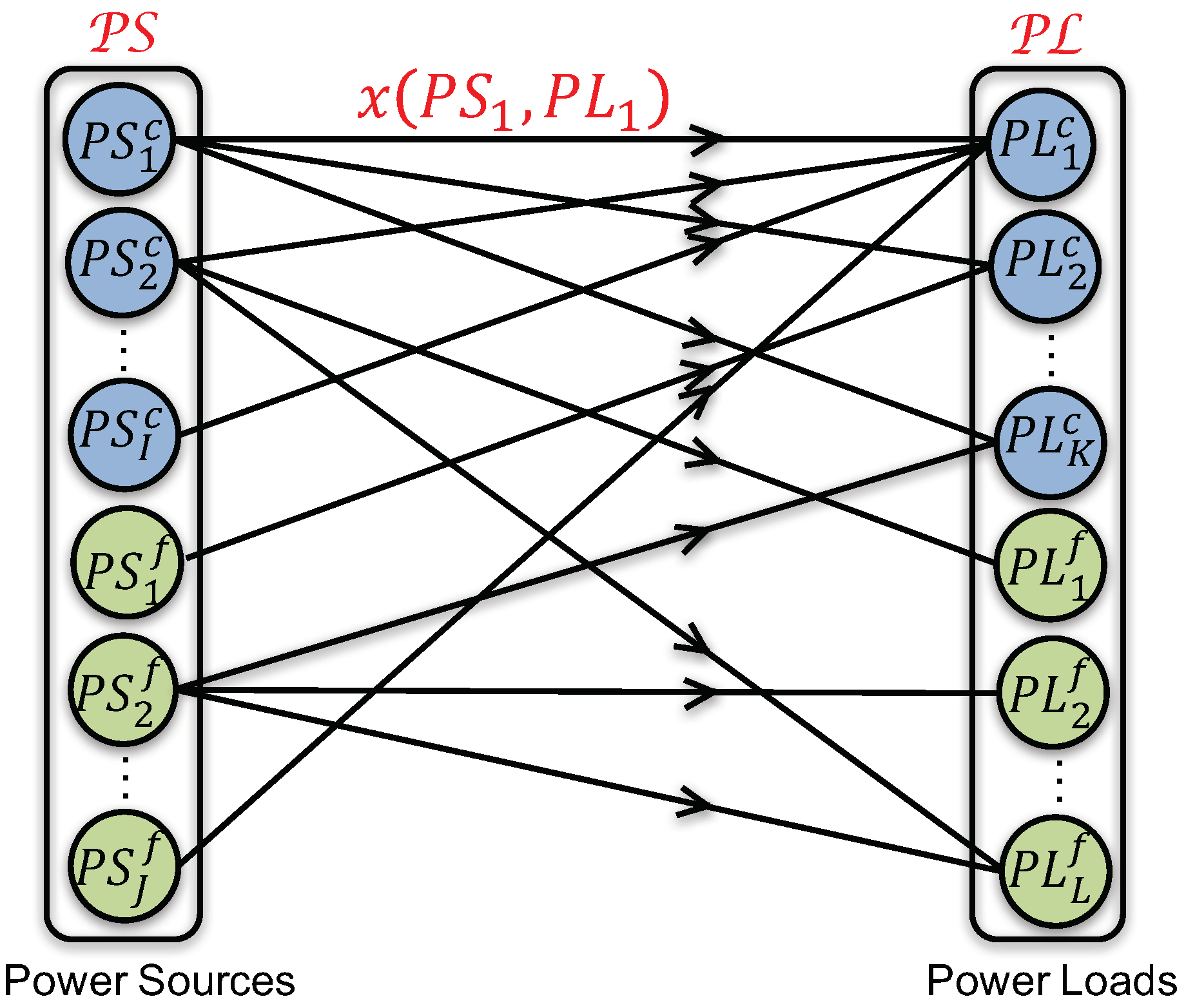
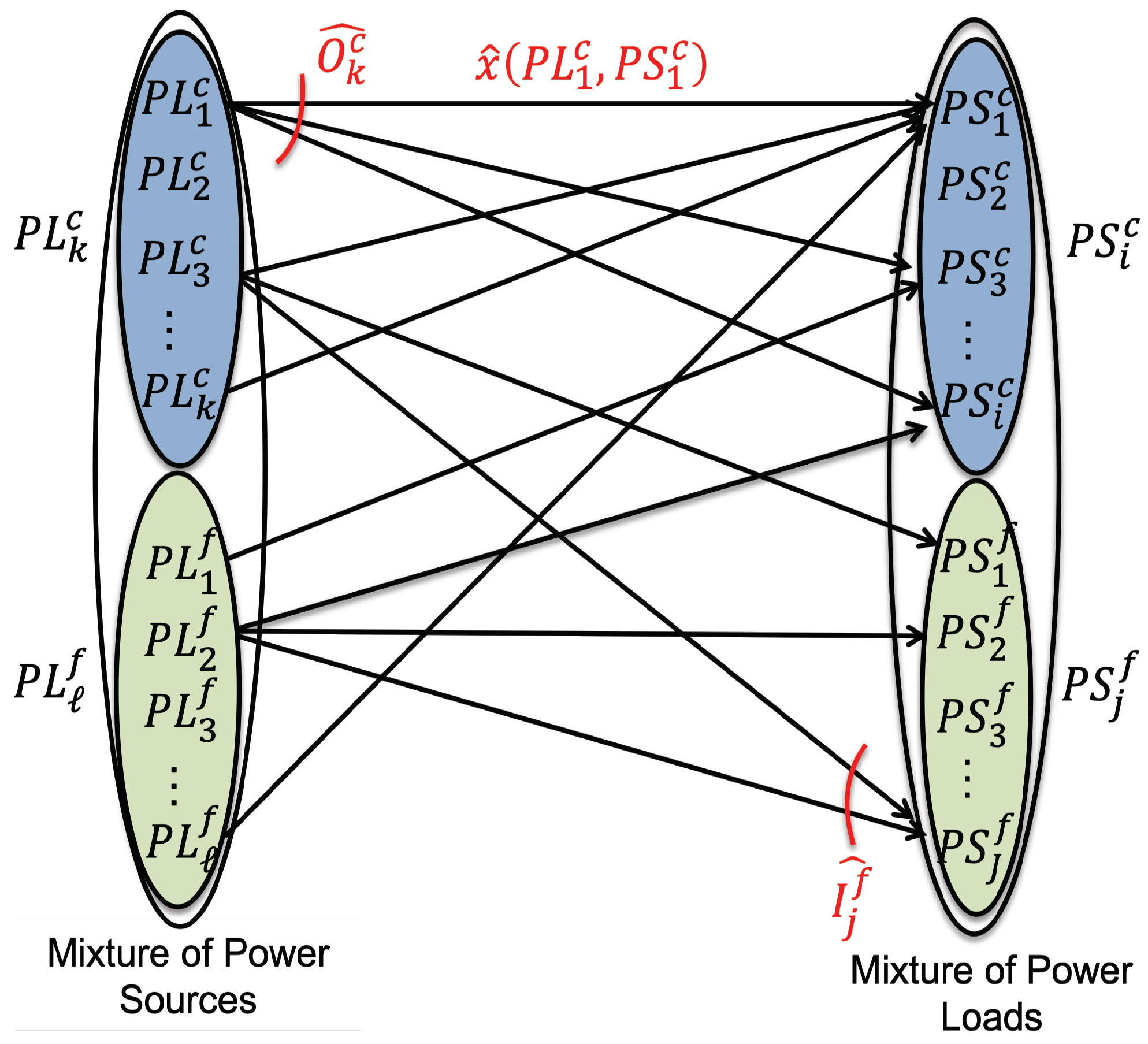
2.1. Illustration and Types of Power Devices
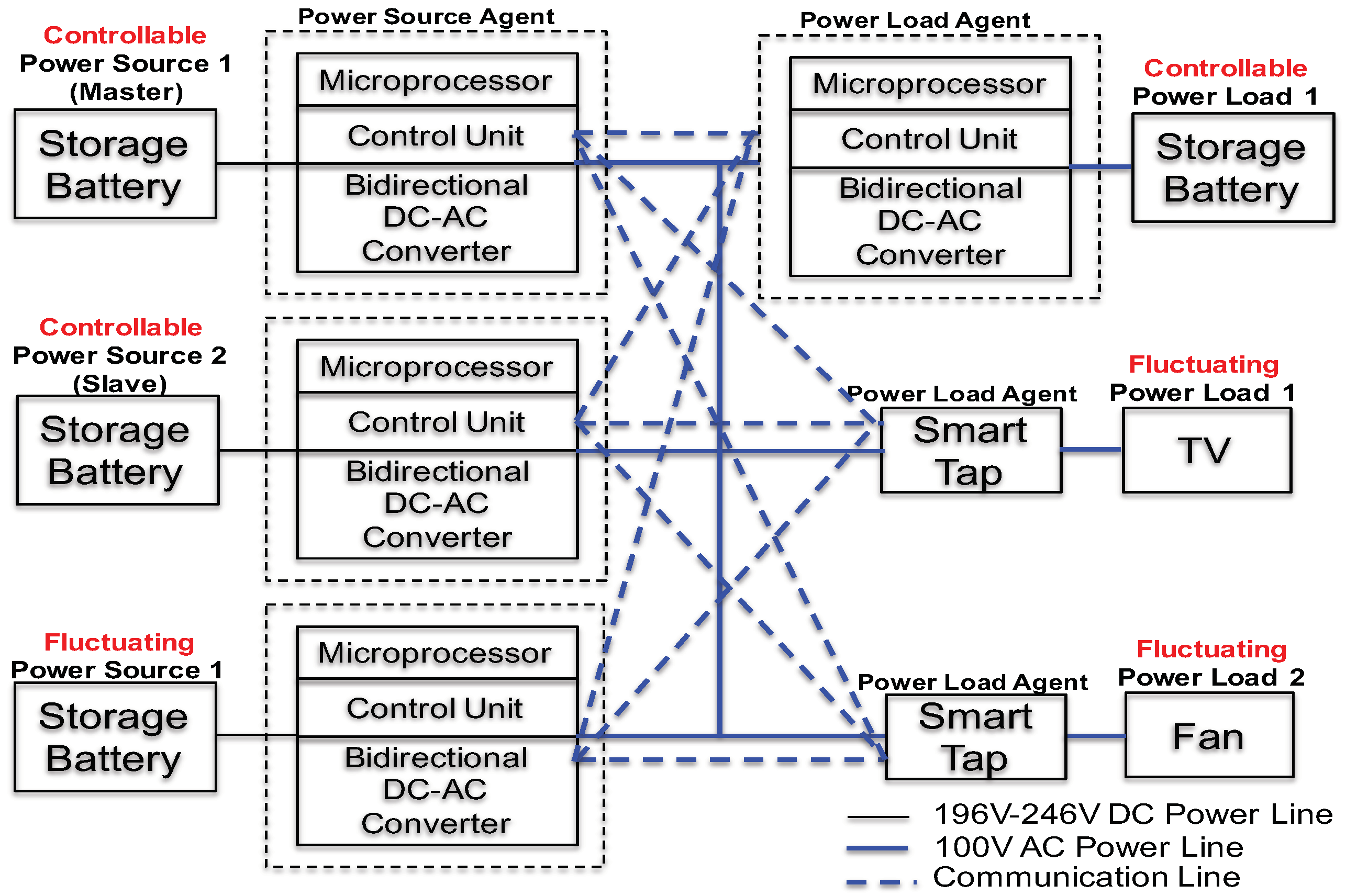
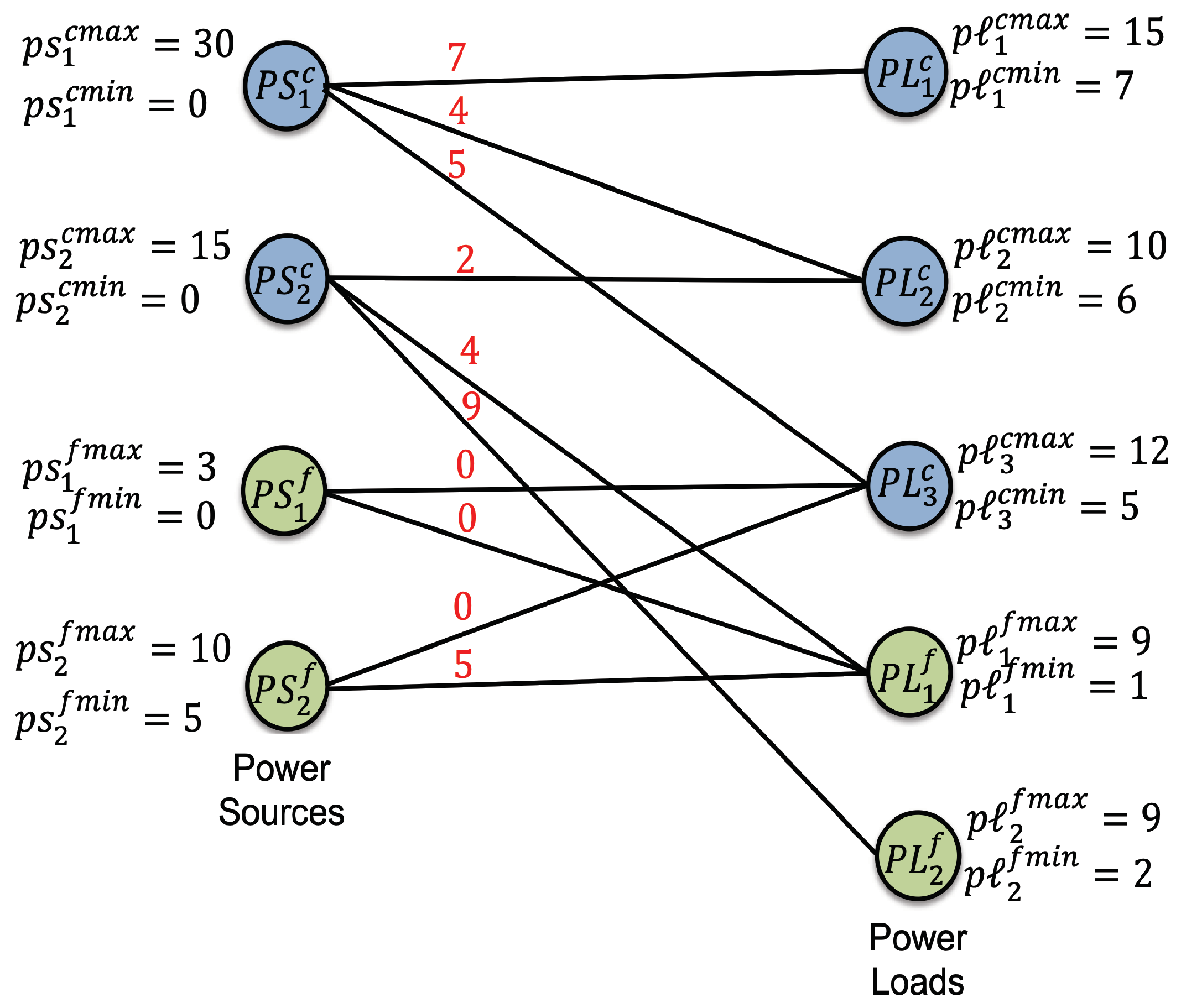
2.2. An Example of a System to Be Considered
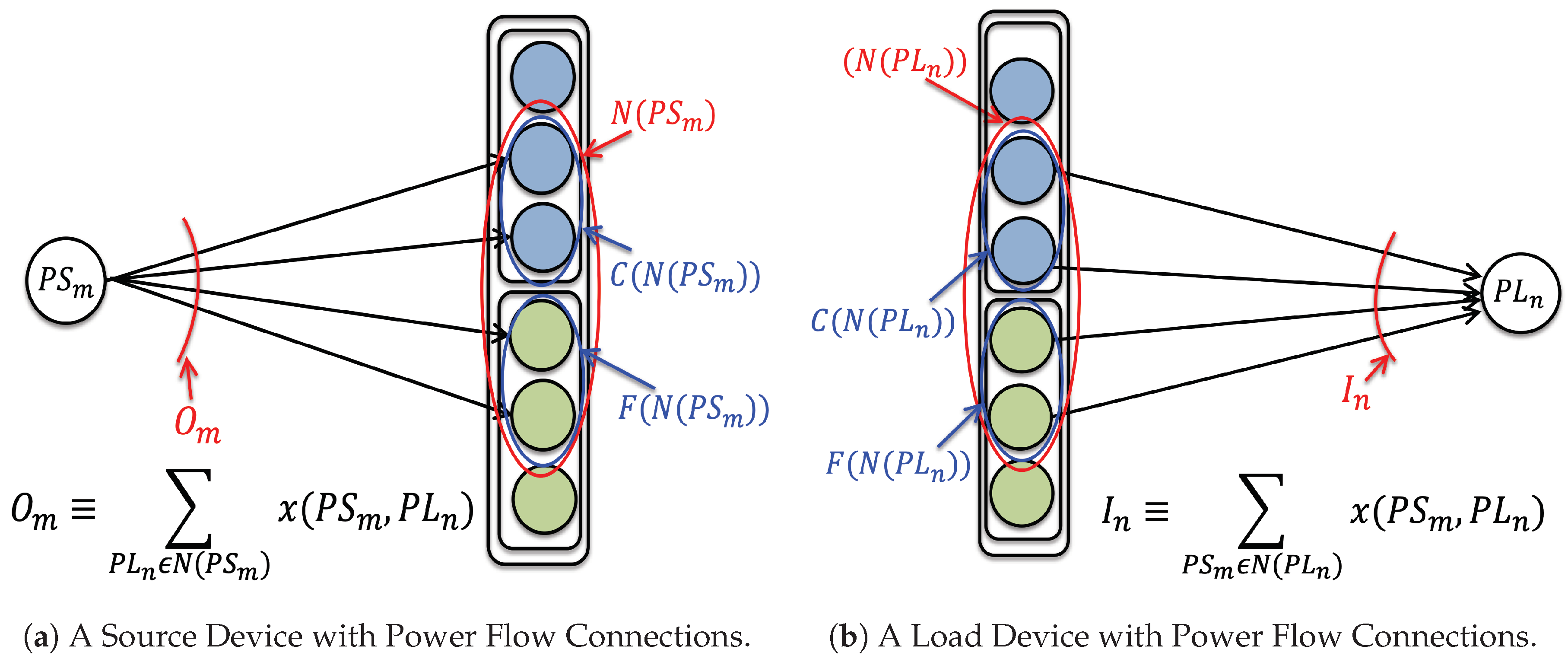
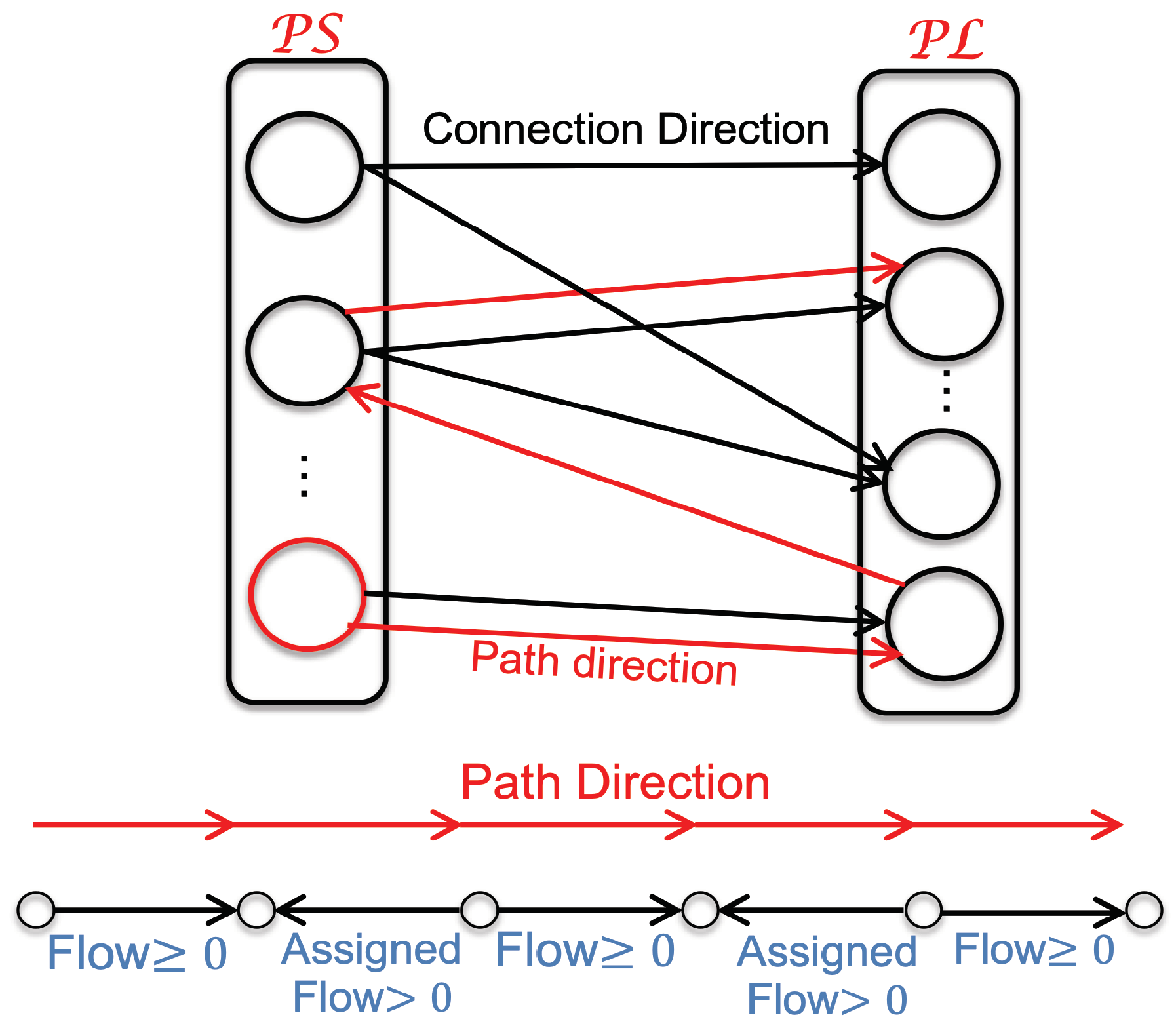
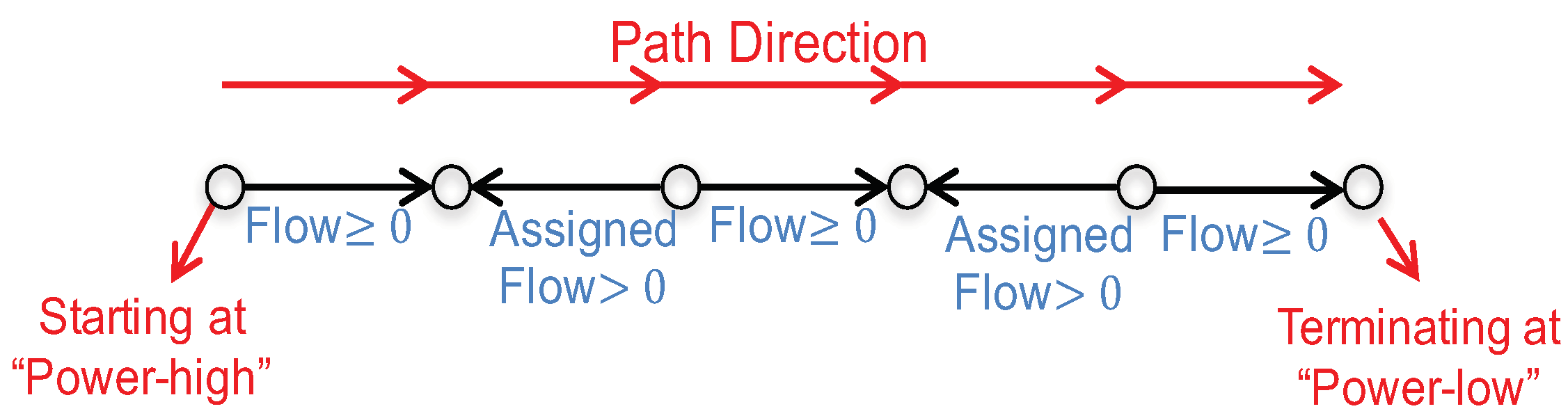
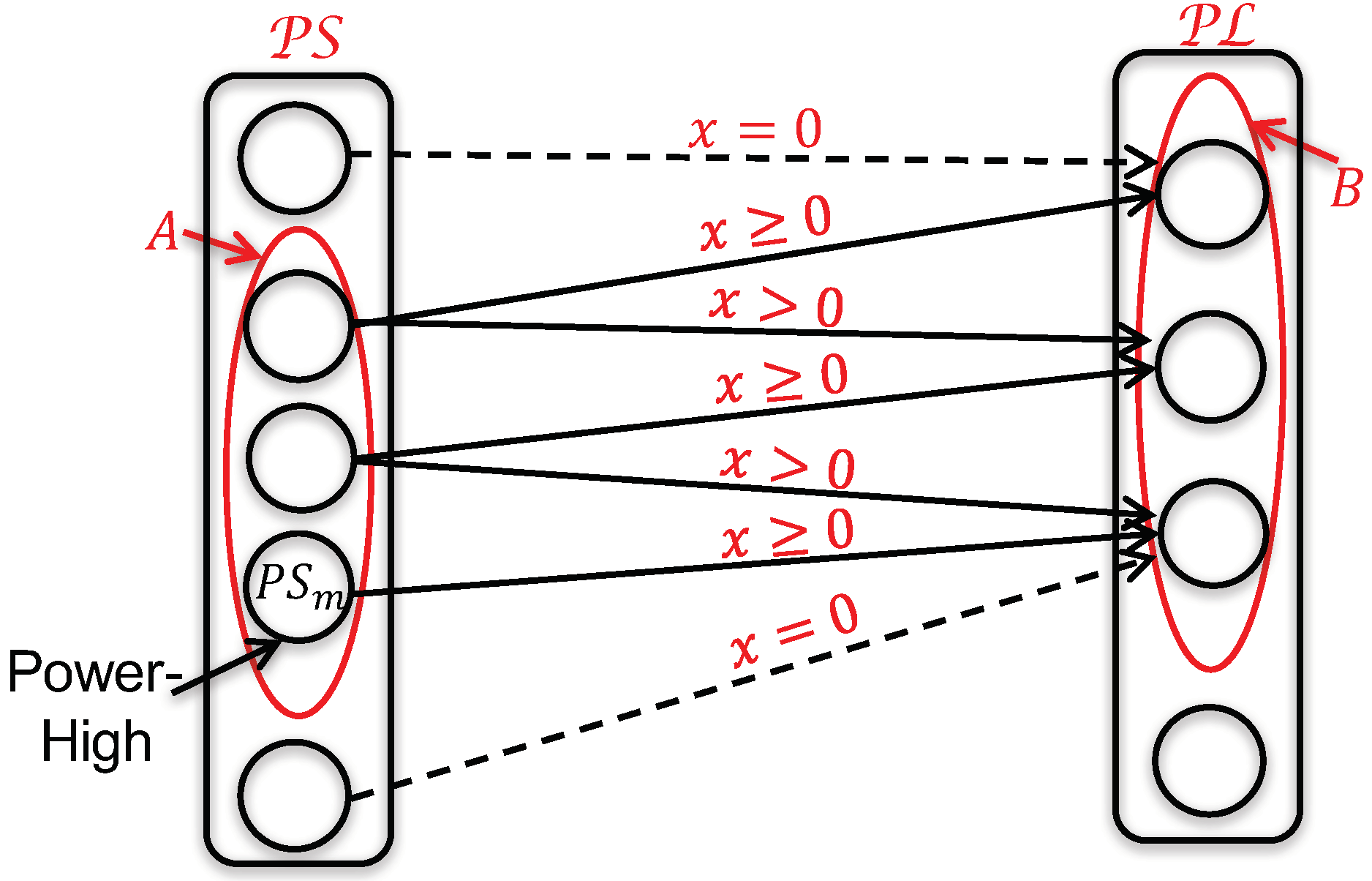
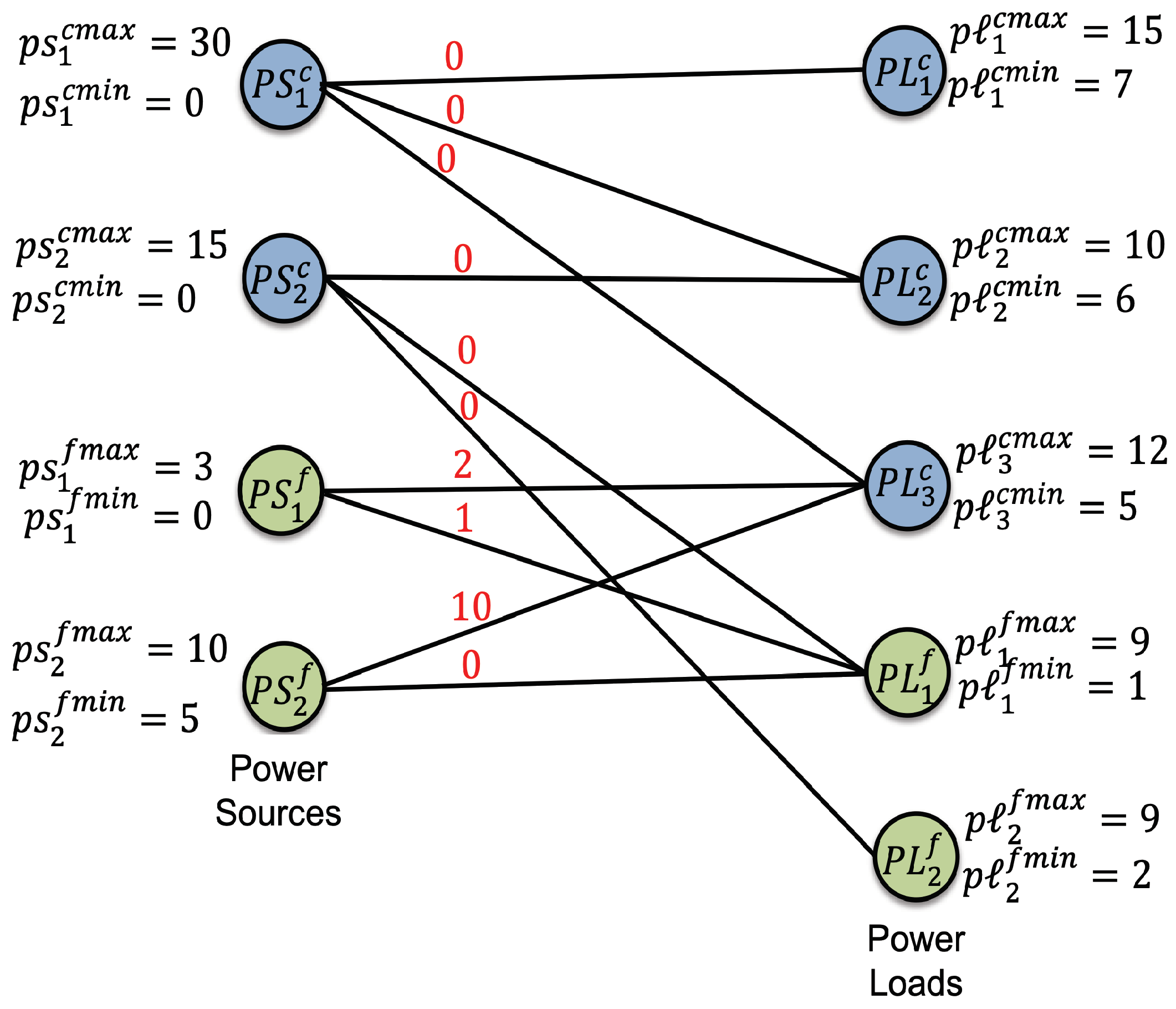
2.3. Power Flow Control
3. Problem Discussed in This Paper
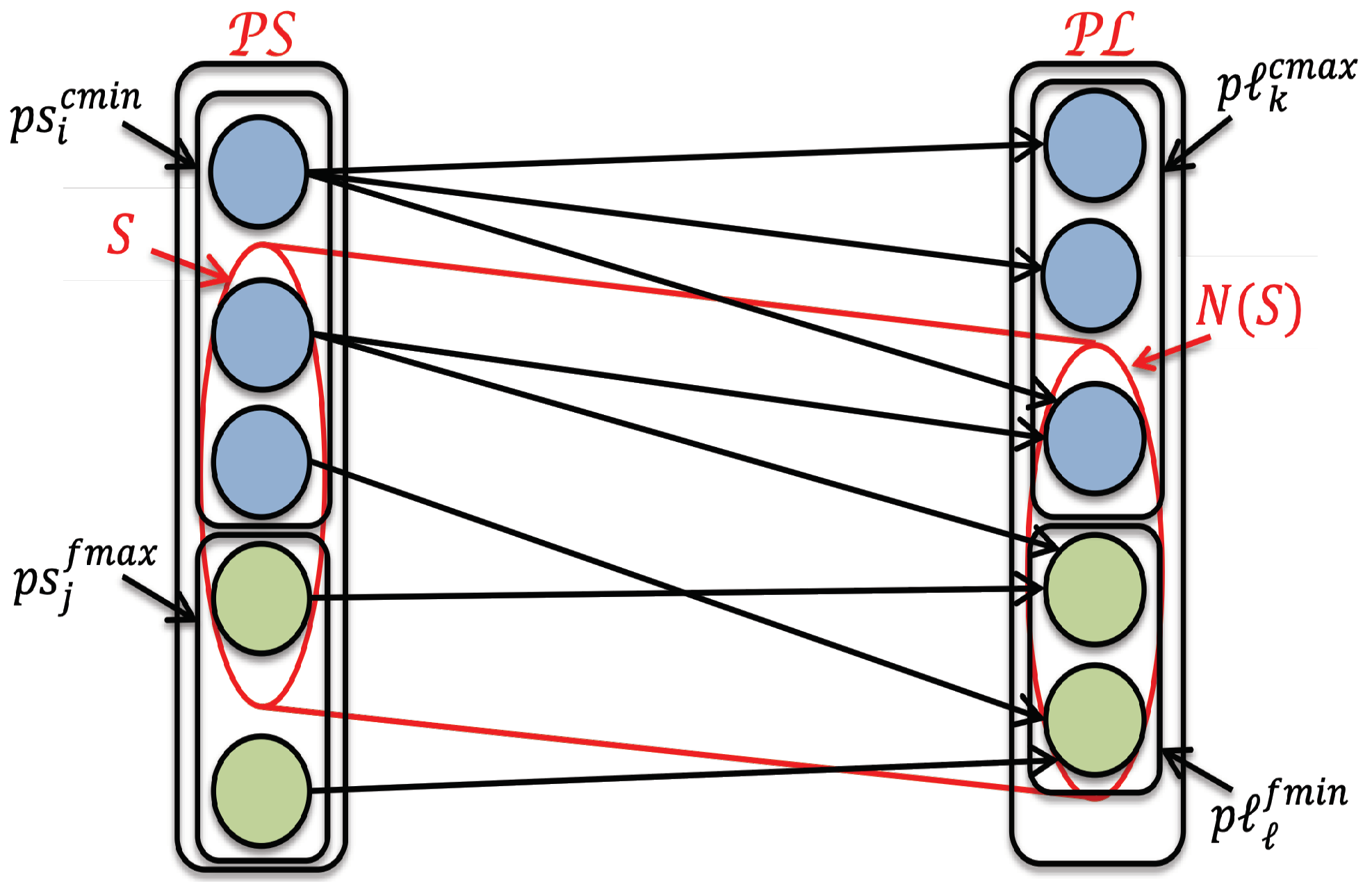
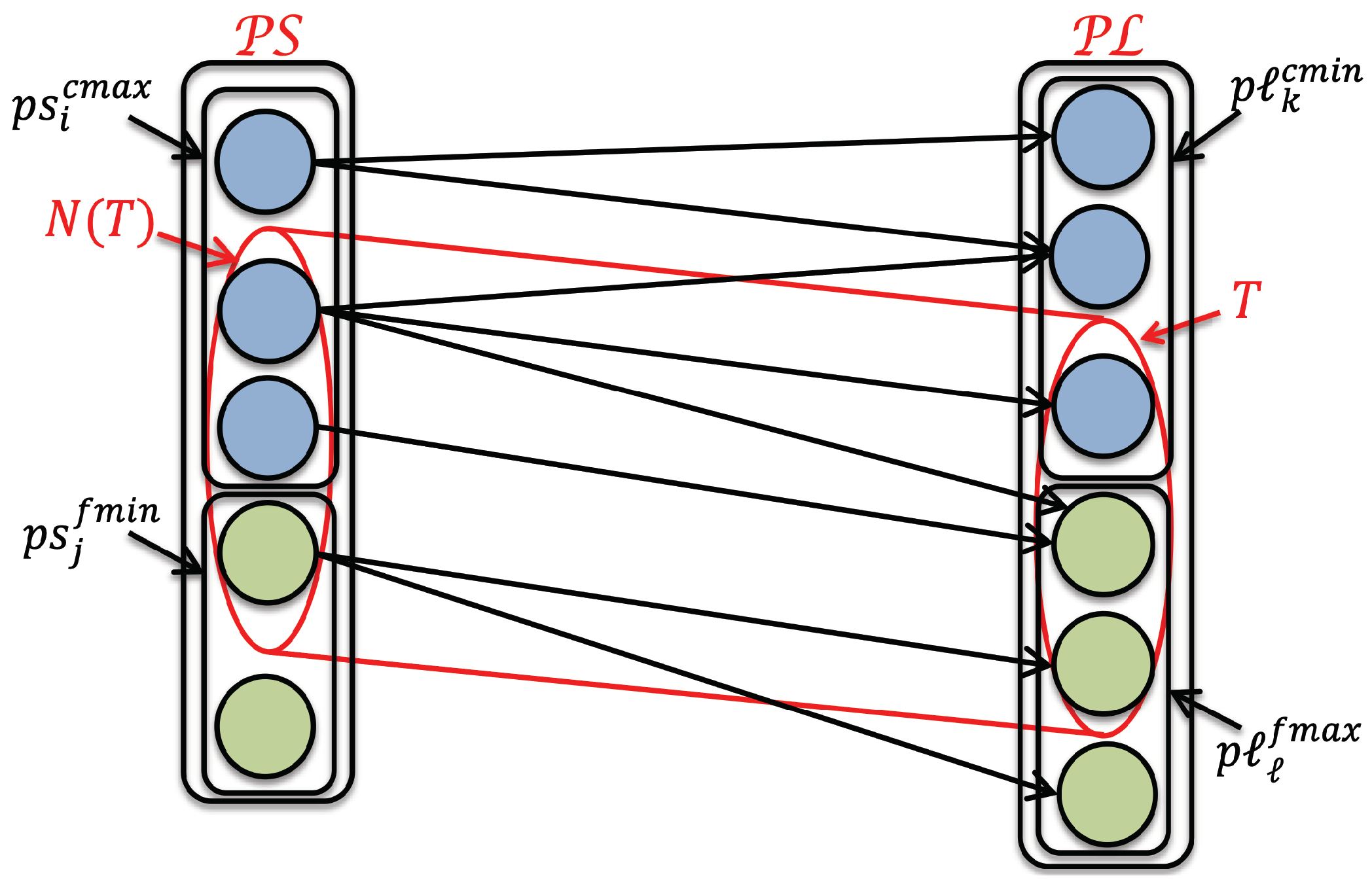
4. New Solvability Theorem
5. Demonstrations
5.1. Example of Robustness Test
5.2. Comparison between Theoretical Result and Monte Carlo Simulation
5.3. Comparison with Our Previous Method
6. Concluding Remarks
Author Contributions
Funding
Conflicts of Interest
Appendix A

References
- Soroudi, A.; Ehsan, M.; Caire, R.; Hadjsaid, N. Possibilistic evaluation of distributed generations impacts on distribution networks. IEEE Trans. Power Syst. 2011, 26, 2293–2301. [Google Scholar] [CrossRef]
- Majd, A.A.; Farjah, E.; Rastegar, M. Composite generation and transmission expansion planning toward high renewable energy penetration in Iran power grid. IET Renew. Power Gener. 2020, 14, 1520–1528. [Google Scholar] [CrossRef]
- Maegaard, P. Balancing fluctuating power sources. In Proceedings of the World-Non-Grid-Connected Wind Power and Energy Conference, Nanjing, China, 5–7 November 2010. [Google Scholar]
- Umer, S.; Tan, Y.; Lim, A.O. Stability analysis for smart homes energy management system with delay consideration. J. Clean Energy Technol. 2014, 2, 332–338. [Google Scholar] [CrossRef]
- Umer, S.; Tan, Y.; Lim, A.O. Priority based power sharing scheme for power consumption control in smart homes. Int. J. Smart Grid Clean Energy 2014, 3, 340–346. [Google Scholar] [CrossRef]
- Umer, S.; Kaneko, M.; Tan, Y.; Lim, A.O. System design and analysis for maximum consuming power control in smart house. J. Autom. Control Eng. 2014, 2, 43–48. [Google Scholar] [CrossRef]
- Kumar, G.A.; Sujay, N.; Tejas, P.; Srikanth, P.; Yashavanth, T.R. Design and implementation of wireless sensor network based smart DC grid for smart cities. In Proceedings of the 4th International Conference on Recent Trends on Electronics, Information, Communication and Technology (RTEICT), Bangalore, India, 17–18 May 2019; pp. 1453–1458. [Google Scholar]
- Lumbreras, S.; Ramos, A.; Banez-Chicharro, F. Optimal transmission network expansion planning in real-sized power systems with high renewable penetration. Electr. Power Syst. Res. 2017, 149, 76–88. [Google Scholar] [CrossRef]
- Shalukho, A.V.; Lipuzhin, I.A.; Voroshilov, A.A. Power quality in microgrids with distributed generation. In Proceedings of the International Ural Conference on Electric Power Engineering (UralCon), Chelyabinsk, Russia, 1–3 October 2019; pp. 54–58. [Google Scholar]
- Han, J.; Choi, C.; Park, W.; Lee, I.; Kim, S. Smart home energy management system including renewable energy based on ZigBee and PLC. IEEE Trans. Consum. Electron. 2014, 60, 198–202. [Google Scholar] [CrossRef]
- Han, J.; Choi, C.; Park, W.; Lee, I.; Kim, S. PLC-based photovoltaic system management for smart home energy management system. IEEE Trans. Consum. Electron. 2014, 60, 184–189. [Google Scholar] [CrossRef]
- Hong, I.; Kang, B.; Park, S. Design and implementation of intelligent energy distribution management with photovoltaic system. IEEE Trans. Consum. Electron. 2012, 58, 340–346. [Google Scholar] [CrossRef]
- Rashidi, Y.; Moallem, M.; Vojdani, S. Wireless Zigbee system for performance monitoring of photovoltaic panels. In Proceedings of the 2011 37th IEEE Photovoltaic Specialists Conference, Seattle, WA, USA, 19–24 June 2011; pp. 3205–3207. [Google Scholar]
- Xiaoli, X.; Daoe, Q. Remote monitoring and control of photovoltaic system using wireless sensor network. In Proceedings of the International Conference on Electric Information and Control Engineering, Wuhan, China, 15–17 April 2011; pp. 633–638. [Google Scholar]
- Biabani, M.; Golkar, M.A.; Johar, A.; Johar, M. Propose a home demand -side management algorithm for smart nano-grid. In Proceedings of the 4th Annual International Power Electronics, Drive Systems and Technologies Conference, Tehran, Iran, 13–14 February 2013; pp. 487–494. [Google Scholar]
- Asare-Bediako, B.; Kling, W.L.; Ribeiro, P.F. Home energy management systems: Evolution, trends and frameworks. In Proceedings of the 2012 47th International Universities Power Engineering Conference (UPEC), London, UK, 4–7 September 2012; pp. 1–5. [Google Scholar]
- Shwehdi, M.H.; Mohamed, S.R. Proposed smart DC Nano-Grid for green buildings a reflective view. In Proceedings of the 2014 International Conference on Renewable Energy Research and Application (ICRERA), Milwaukee, WI, USA, 19–22 October 2014; pp. 765–769. [Google Scholar]
- Kinn, M.C. Proposed components for the design of a smart Nano-Grid for a domestic electrical system that operates at below 50V DC. In Proceedings of the 2011 2nd IEEE PES International Conference and Exhibition on Innovative Smart Grid Technologies, Manchester, UK, 5–7 December 2011; pp. 1–7. [Google Scholar]
- Schonberger, J.; Duke, R.; Round, S.D. DC-Bus signaling: A distributed control strategy for a hybrid renewable Nano-grid. IEEE Trans. Ind. Electron. 2006, 53, 1453–1460. [Google Scholar] [CrossRef]
- Latha, S.H.; Mohan, S.C. Centralized power control strategy for 25 kW Nano-Grid for rustic electrification. In Proceedings of the 2012 International Conference on Emerging Trends in Science, Engineering and Technology (INCOSET), Tiruchirappalli, India, 13–14 December 2012; pp. 666–669. [Google Scholar]
- He, L.; Wei, Z.; Yan, H.; Xv, K.Y.; Zhao, M.Y.; Cheng, S. A day ahead scheduling optimization model of multi-microgrid considering interactive power control. In Proceedings of the International Conference on Intelligent Green Building and Smart Grid (IGBSG), Yi-chang, China, 6–9 September 2019; pp. 456–461. [Google Scholar]
- Kondoh, J.; Higuchi, N.; Sekine, S.; Yamaguchi, H.; Ishii, I. Distribution system research with an analog simulator. In Proceedings of the Power Electronics for Distributed and Co-Generation, Irvine, CA, USA, 22–24 March 2004. [Google Scholar]
- Kondoh, J.; Aki, H.; Yamaguchi, H.; Murata, A.; Ishii, I. Consumed power control of time deferrable loads for frequency regulation. In Proceedings of the IEEE PES Power Systems Conference and Exposition, New York, NY, USA, 10–13 October 2004. [Google Scholar]
- Javaid, S.; Kurose, Y.; Kato, T.; Matsuyama, T. Cooperative distributed control implementation of the power flow coloring over a Nano-grid with fluctuating power loads. IEEE Trans. Smart Grid 2017, 8, 342–352. [Google Scholar] [CrossRef]
- Javaid, S.; Kato, T.; Matsuyama, T. Power flow coloring system over a Nano-grid with fluctuating power sources and loads. IEEE Trans. Ind. Inf. 2017, 13, 3174–3184. [Google Scholar] [CrossRef]
- Yamaguchi, H.; Kondoh, J.; Aki, H.; Murata, A.; Ishii, I. Power fluctuation analysis of distribution network introduced a large number of photovoltaic generation system. In Proceedings of the 18th International Conference on Electricity Distribution, Turin, Italy, 6–9 June 2005. [Google Scholar]
- Javaid, S.; Kaneko, M.; Tan, Y. Structural condition for controllable power flow system containing controllable and fluctuating power devices. Energies 2020, 13, 1627. [Google Scholar] [CrossRef]
- Javaid, S.; Kaneko, M.; Yasuo, T.A.N. Power flow management: Solvability condition for a system with controllable and fluctuating devices. In Proceedings of the 11th IEEE PES Asia-Pacific Power and Energy Engineering Conference (IEEE APPEEC 2019), Macao, China, 1–4 December 2019. [Google Scholar]
- Riffonneau, Y.; Bacha, S.; Ploix, S. Optimal power flow management for grid connected PV systems with batteries. IEEE Trans. Sust. Energy 2011, 2, 309–320. [Google Scholar] [CrossRef]
- Denholma, P.; Margolis, R.M. Evaluating the limits of solar pho-tovoltaics (PV) in electric power systems utilizing energy storage and other enabling technologies. Energy Policy 2007, 35, 4424–4433. [Google Scholar] [CrossRef]
- Perrin, M.; Saint-Drenan, Y.M.; Mattera, F.; Malbranche, P. Lead- acid batteries in stationary applications: Competitors and new markets for large penetration of renewable energies. J. Power Sources 2005, 144, 402–410. [Google Scholar] [CrossRef]
- Martinez Cesena, E.A.; Capuder, T.; Mancarella, P. Flexible distributed multienergy generation system expansion planning under uncertainty. IEEE Trans. Smart Grid 2016, 7, 348–357. [Google Scholar] [CrossRef]
- Wei, J.; Zhang, Y.; Wang, J.; Cao, X.; Khan, M.A. Multi-period planning of multi-energy microgrid with multi-type uncertainties using chance constrained information gap decision method. Appl. Energy 2020, 260, 1–19. [Google Scholar] [CrossRef]
- Louie, H. Off-Grid Electrical Systems in Developing Countries; Chapter 10; Springer Nature: Basel, Switzerland, 2018. [Google Scholar]
- Axler, S.; Ribet, K.A. Graduate Texts in Mathematics; Springer-Verlag: Berlin, Germany, 2008. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S | |||
|---|---|---|---|
| 0 | 37 | ||
| 0 | 13 | ||
| 3 | 13 | ||
| 10 | 13 | ||
| 0 | 40 | ||
| 3 | 38 | ||
| 10 | 38 | ||
| 3 | 25 | ||
| 10 | 25 | ||
| 13 | 13 | ||
| 3 | 40 | ||
| 10 | 40 | ||
| 13 | 38 | ||
| 13 | 25 | ||
| 13 | 40 |
| S | |||
|---|---|---|---|
| 0 | 37 | ||
| 0 | 13 | ||
| 14 | 13 |
| Power Sources | Minimum Power Limitation | Maximum Power Limitation | Power Loads | Minimum Power Limitation | Maximum Power Limitation |
|---|---|---|---|---|---|
| 0 | 160 | 150 | 200 | ||
| 0 | 100 | 10 | 10 | ||
| 0 | 100 | 10 | 15 | ||
| 0 | 100 | 10 | 20 | ||
| 0 | 100 | 10 | 24 | ||
| 60 | 150 | 0 | 7 | ||
| 0 | 30 | 0 | 56 | ||
| 0 | 45 | 0 | 5 | ||
| 0 | 5 | 100 | 333 | ||
| 0 | 43 | 0 | 4 |
| Outgoing Power from Power Sources | Outgoing Power | Incoming Power of Power Loads | Incoming Power |
|---|---|---|---|
| 0 | 174 | ||
| 0 | 0 | ||
| 0 | 0 | ||
| 0 | 0 | ||
| 0 | 24 | ||
| 150 | 0 | ||
| 30 | 0 | ||
| 45 | 0 | ||
| 5 | 75 | ||
| 43 | 0 |
| Outgoing Power from Power Sources | Outgoing Power | Incoming Power of Power Loads | Incoming Power |
|---|---|---|---|
| 153 | 150 | ||
| 100 | 10 | ||
| 100 | 10 | ||
| 90 | 10 | ||
| 92 | 10 | ||
| 60 | 7 | ||
| 0 | 56 | ||
| 0 | 5 | ||
| 0 | 333 | ||
| 0 | 4 |
| Size | Theorem 1 Based Test | Theorem 2 Based Test |
|---|---|---|
| 10, 10 | 0.00085 | 0.00035 |
| 20, 20 | 1.56 | 0.00073 |
| 25, 25 | 60.32 | 0.00092 |
| 30, 30 | 1586.64 | 0.00113 |
| 100, 100 | N/A | 0.00400 |
| 1000, 1000 | N/A | 0.03485 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Javaid, S.; Kaneko, M.; Tan, Y. An Efficient Testing Scheme for Power-Balanceability of Power System Including Controllable and Fluctuating Power Devices. Designs 2020, 4, 48. https://doi.org/10.3390/designs4040048
Javaid S, Kaneko M, Tan Y. An Efficient Testing Scheme for Power-Balanceability of Power System Including Controllable and Fluctuating Power Devices. Designs. 2020; 4(4):48. https://doi.org/10.3390/designs4040048
Chicago/Turabian StyleJavaid, Saher, Mineo Kaneko, and Yasuo Tan. 2020. "An Efficient Testing Scheme for Power-Balanceability of Power System Including Controllable and Fluctuating Power Devices" Designs 4, no. 4: 48. https://doi.org/10.3390/designs4040048
APA StyleJavaid, S., Kaneko, M., & Tan, Y. (2020). An Efficient Testing Scheme for Power-Balanceability of Power System Including Controllable and Fluctuating Power Devices. Designs, 4(4), 48. https://doi.org/10.3390/designs4040048