
A Parameter Refinement Method for Ptychography Based on Deep Learning Concepts

 , , , and
, , , and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Iterative Phase Retrieval
1.2. The Parameter Problem
1.3. Proposed Solution
1.4. Manuscript Organisation
2. Background
2.1. Ptychography Model
2.2. Parameter Refinement
2.3. Automatic Differentiation
3. Computational Methodology
3.1. Loss Function
3.2. Complex-Valued AD
3.3. Regularisation
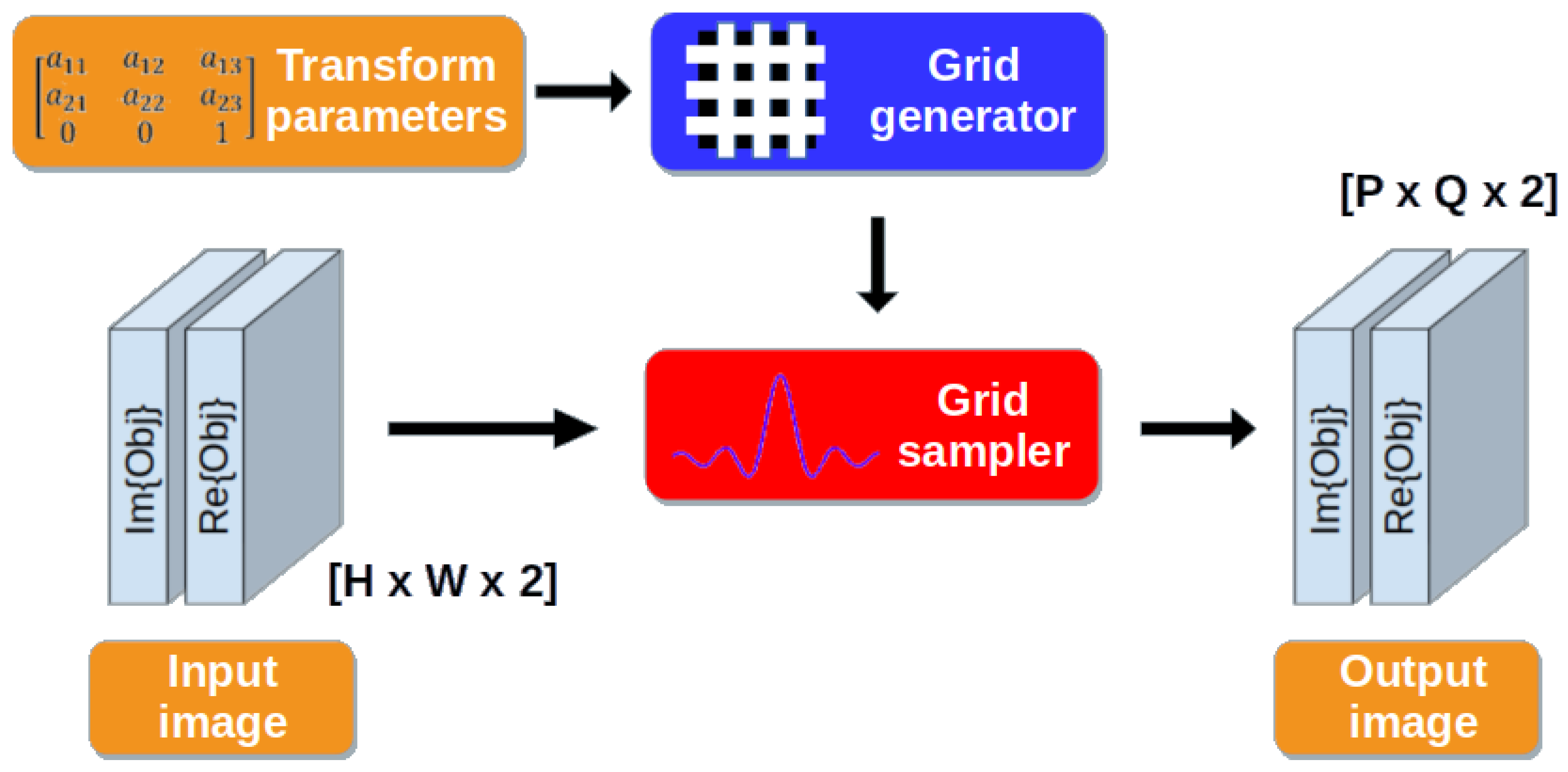
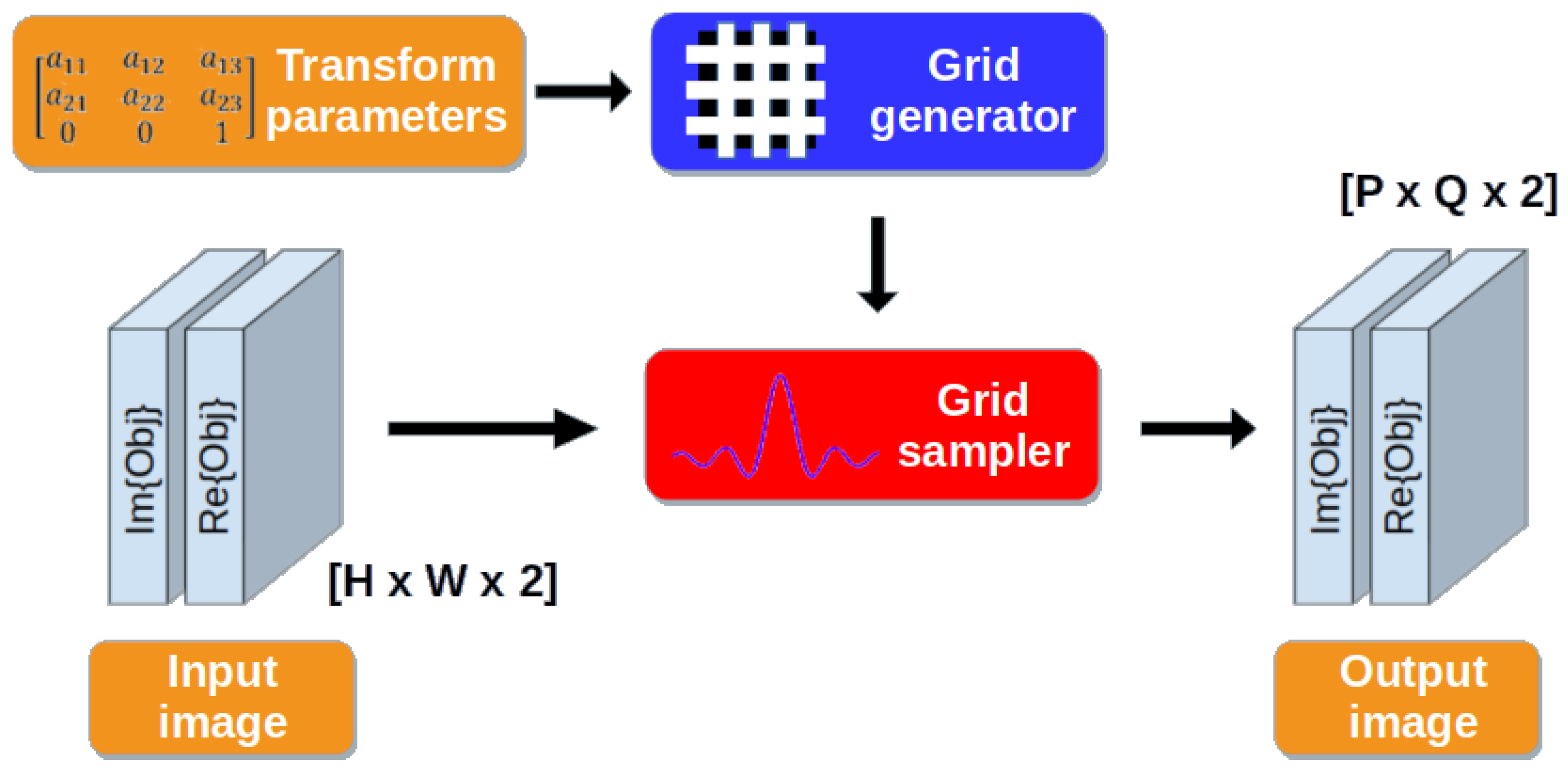
3.4. Spatial Transform Layer
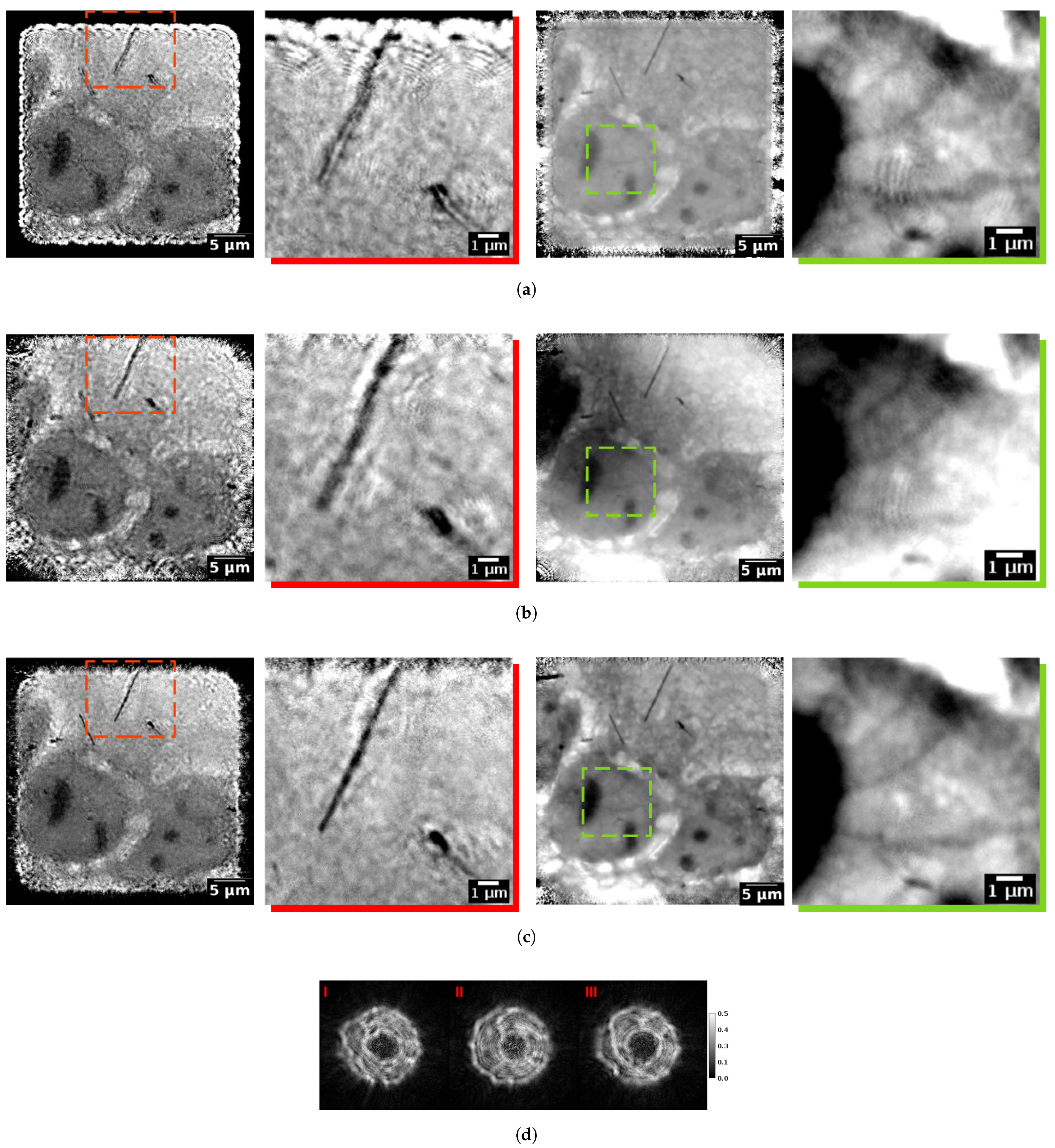
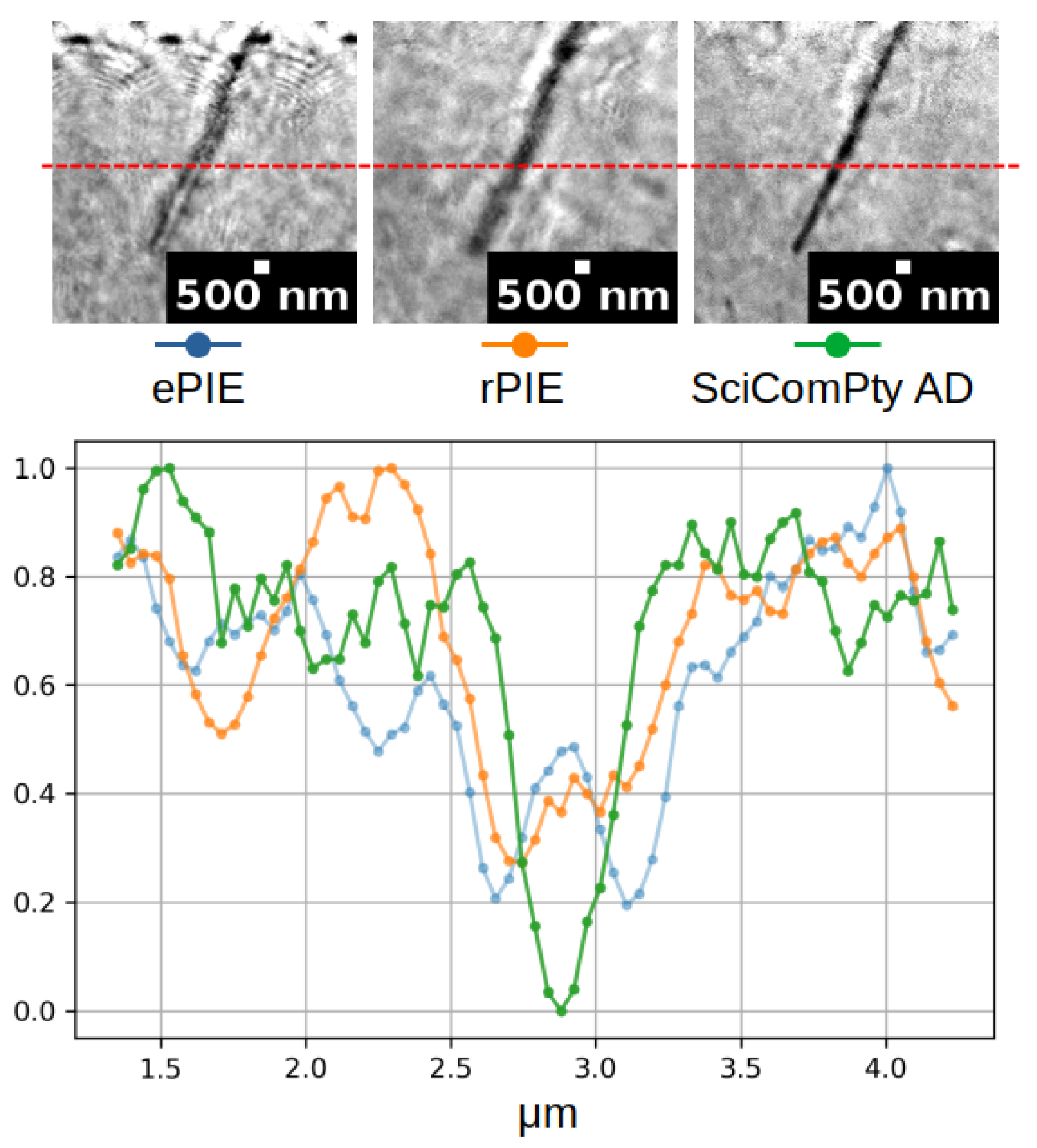
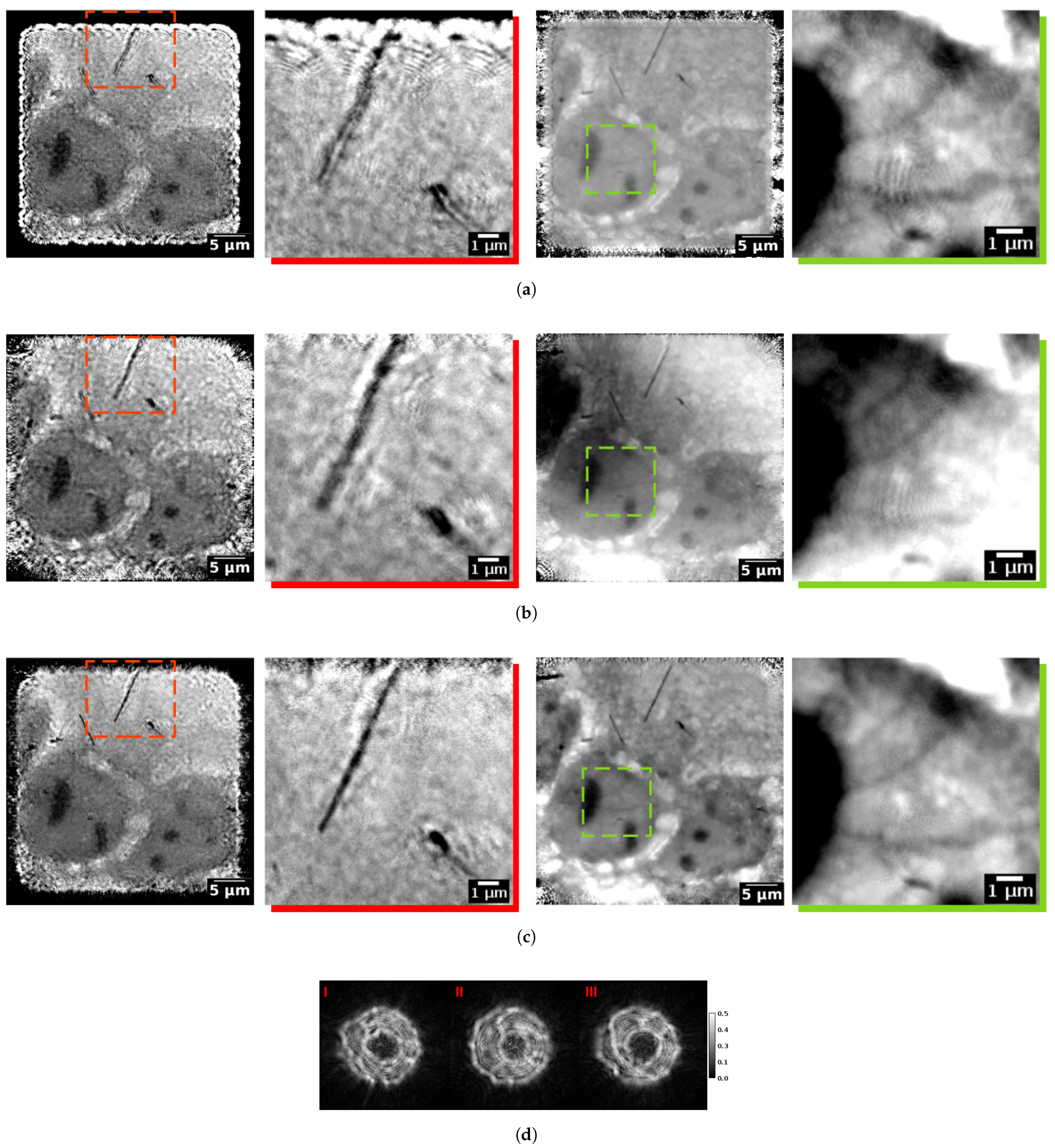
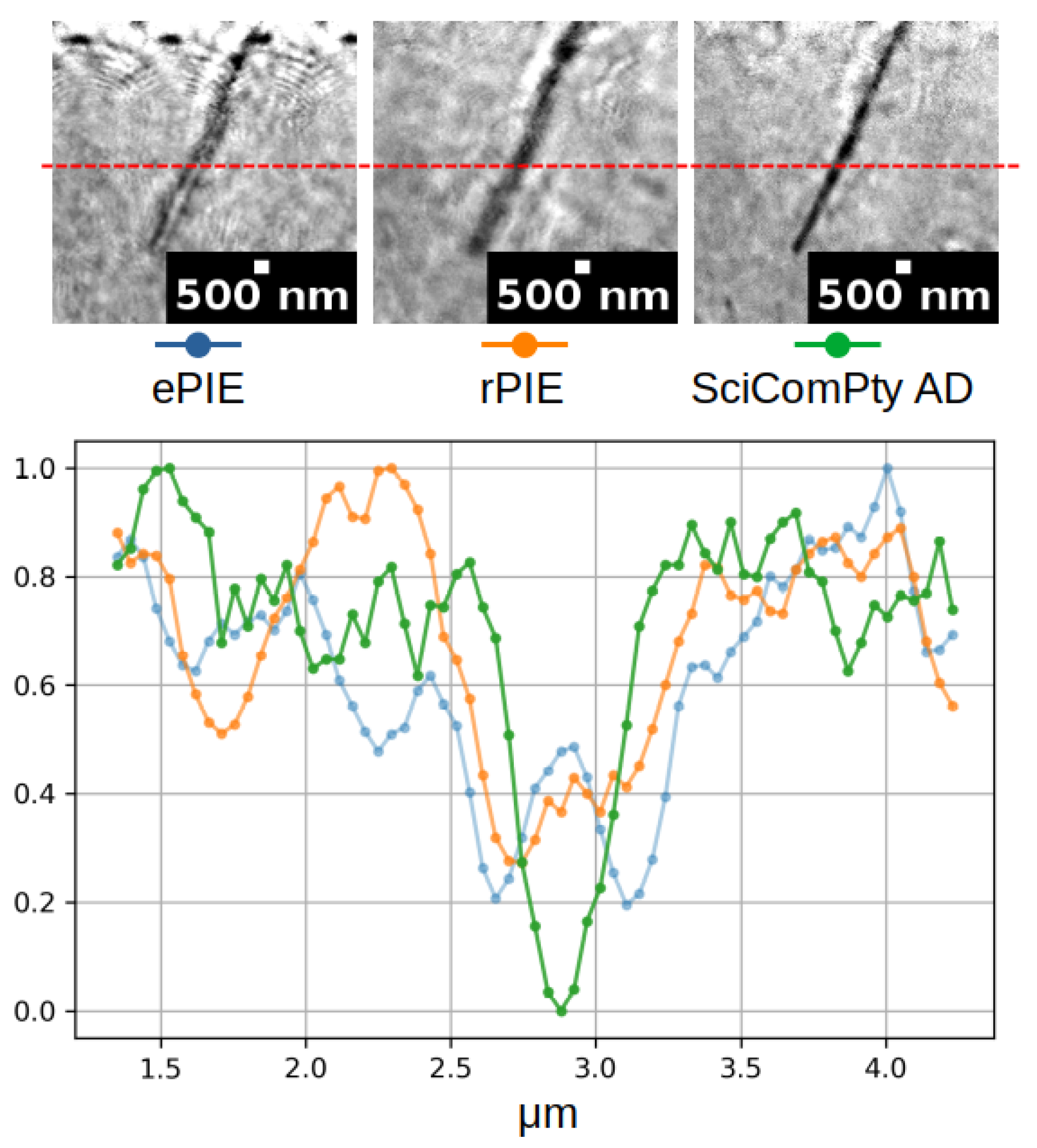
4. Results and Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AD | Automatic Differentiation |
| CCD | Charge-Coupled Device |
| CDI | Coherent Diffraction Imaging |
| CPU | Central Processing Unit |
| CT | Computed Tomography |
| DM | Differential Map |
| DL | Deep Learning |
| FWHM | Full-Width at Half-Maximum |
| FZP | Fresnel Zone Plate |
| GPU | Graphics Processing Unit |
| MSE | Mean-Squared Error |
| OSA | Order Sorting Aperture |
| PIE | Ptychography Iterative Engine |
| SSIM | Structural Similarity Index |
| STN | Spatial Transformer Network |
| STXM | Scanning Transmission X-ray Microscopy |
| TXM | Transmission X-ray Microscopy |
References
- Shechtman, Y.; Eldar, Y.C.; Cohen, O.; Chapman, H.N.; Miao, J.; Segev, M. Phase Retrieval with Application to Optical Imaging: A contemporary overview. IEEE Signal Process. Mag. 2015, 32, 87–109. [Google Scholar] [CrossRef] [Green Version]
- Rodenburg, J.M.; Faulkner, H.M.L. A phase retrieval algorithm for shifting illumination. Appl. Phys. Lett. 2004, 85, 4795–4797. [Google Scholar] [CrossRef] [Green Version]
- Rodenburg, J.; Maiden, A. Ptychography. In Springer Handbook of Microscopy; Hawkes, P.W., Spence, J.C.H., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 819–904. [Google Scholar] [CrossRef]
- Miao, J.; Charalambous, P.; Kirz, J.; Sayre, D. Extending the methodology of X-ray crystallography to allow imaging of micrometre-sized non-crystalline specimens. Nature 1999, 400, 342–344. [Google Scholar] [CrossRef]
- Robinson, I.K.; Vartanyants, I.A.; Williams, G.J.; Pfeifer, M.A.; Pitney, J.A. Reconstruction of the Shapes of Gold Nanocrystals Using Coherent X-Ray Diffraction. Phys. Rev. Lett. 2001, 87, 195505. [Google Scholar] [CrossRef] [Green Version]
- Hounsfield, G.N. Computerized transverse axial scanning (tomography): Part 1. Description of system. BJR 1973, 46, 1016–1022. [Google Scholar] [CrossRef]
- Cormack, A.M. Reconstruction of densities from their projections, with applications in radiological physics. Phys. Med. Biol. 1973, 18, 195–207. [Google Scholar] [CrossRef]
- Pfeiffer, F. X-ray ptychography. Nature Photon. 2017, 12, 9–17. [Google Scholar] [CrossRef]
- Gianoncelli, A.; Kourousias, G.; Merolle, L.; Altissimo, M.; Bianco, A. Current status of the TwinMic beamline at Elettra: A soft X-ray transmission and emission microscopy station. J. Synchrotron Radiat. 2016, 23, 1526–1537. [Google Scholar] [CrossRef]
- Gianoncelli, A.; Bonanni, V.; Gariani, G.; Guzzi, F.; Pascolo, L.; Borghes, R.; Billè, F.; Kourousias, G. Soft X-ray Microscopy Techniques for Medical and Biological Imaging at TwinMic—Elettra. Appl. Sci. 2021, 11, 7216. [Google Scholar] [CrossRef]
- Dierolf, M.; Thibault, P.; Menzel, A.; Kewish, C.M.; Jefimovs, K.; Schlichting, I.; König, K.v.; Bunk, O.; Pfeiffer, F. Ptychographic coherent diffractive imaging of weakly scattering specimens. New J. Phys. 2010, 12, 035017. [Google Scholar] [CrossRef]
- Hüe, F.; Rodenburg, J.; Maiden, A.; Midgley, P. Extended ptychography in the transmission electron microscope: Possibilities and limitations. Ultramicroscopy 2011, 111, 1117–1123. [Google Scholar] [CrossRef]
- Shenfield, A.; Rodenburg, J.M. Evolutionary determination of experimental parameters for ptychographical imaging. J. Appl. Phys. 2011, 109, 124510. [Google Scholar] [CrossRef] [Green Version]
- Nikolic, B. Acceleration of Non-Linear Minimisation with PyTorch. arXiv 2018, arXiv:1805.07439. [Google Scholar]
- Li, T.M.; Gharbi, M.; Adams, A.; Durand, F.; Ragan-Kelley, J. Differentiable programming for image processing and deep learning in halide. ACM Trans. Graph. 2018, 37, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Jiang, S.; Guo, K.; Liao, J.; Zheng, G. Solving Fourier ptychographic imaging problems via neural network modeling and TensorFlow. Biomed. Opt. Express 2018, 9, 3306. [Google Scholar] [CrossRef]
- Kandel, S.; Maddali, S.; Allain, M.; Hruszkewycz, S.O.; Jacobsen, C.; Nashed, Y.S.G. Using automatic differentiation as a general framework for ptychographic reconstruction. Opt. Express 2019, 27, 18653. [Google Scholar] [CrossRef] [Green Version]
- Du, M.; Kandel, S.; Deng, J.; Huang, X.; Demortiere, A.; Nguyen, T.T.; Tucoulou, R.; De Andrade, V.; Jin, Q.; Jacobsen, C. Adorym: A multi-platform generic X-ray image reconstruction framework based on automatic differentiation. Opt. Express 2021, 29, 10000. [Google Scholar] [CrossRef] [PubMed]
- Jaderberg, M.; Simonyan, K.; Zisserman, A.; Kavukcuoglu, K. Spatial Transformer Networks. In Advances in Neural Information Processing Systems 28: Annual Conference on Neural Information Processing Systems 2018, NeurIPS 2015, Montréal, QC, Canada, 7–12 December 2015; Cortes, C., Lawrence, N.D., Lee, D.D., Sugiyama, M., Garnett, R., Eds.; NeurIPS: La Jolla, CA, USA, 2015; pp. 2017–2025. [Google Scholar]
- Guzzi, F.; Kourousias, G.; Billè, F.; Pugliese, R.; Gianoncelli, A. Material Concerning a Publication on an Autograd-Based Method for Ptychography, Implemented within the SciComPty Suite. Available online: https://doi.org/10.5281/zenodo.5560908 (accessed on 15 February 2021).
- Thibault, P.; Dierolf, M.; Menzel, A.; Bunk, O.; David, C.; Pfeiffer, F. High-Resolution Scanning X-ray Diffraction Microscopy. Science 2008, 321, 379–382. [Google Scholar] [CrossRef]
- Maiden, A.M.; Rodenburg, J.M. An improved ptychographical phase retrieval algorithm for diffractive imaging. Ultramicroscopy 2009, 109, 1256–1262. [Google Scholar] [CrossRef]
- Whitehead, L.W.; Williams, G.J.; Quiney, H.M.; Vine, D.J.; Dilanian, R.A.; Flewett, S.; Nugent, K.A.; Peele, A.G.; Balaur, E.; McNulty, I. Diffractive Imaging Using Partially Coherent X Rays. Phys. Rev. Lett. 2009, 103, 243902. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Abbey, B.; Dilanian, R.; Balaur, E.; van Riessen, G.; Junker, M.; Tran, C.Q.; Jones, M.W.M.; Peele, A.G.; McNulty, I.; et al. Diffraction imaging: The limits of partial coherence. Phys. Rev. B 2012, 86, 235401. [Google Scholar] [CrossRef] [Green Version]
- Thibault, P.; Menzel, A. Reconstructing state mixtures from diffraction measurements. Nature 2013, 494, 68–71. [Google Scholar] [CrossRef]
- Batey, D.J.; Claus, D.; Rodenburg, J.M. Information multiplexing in ptychography. Ultramicroscopy 2014, 138, 13–21. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Edo, T.; Batey, D.; Rodenburg, J.; Maiden, A. Breaking ambiguities in mixed state ptychography. Opt. Express 2016, 24, 9038. [Google Scholar] [CrossRef] [PubMed]
- Shi, X.; Burdet, N.; Batey, D.; Robinson, I. Multi-Modal Ptychography: Recent Developments and Applications. Appl. Sci. 2018, 8, 1054. [Google Scholar] [CrossRef] [Green Version]
- Guizar-Sicairos, M.; Fienup, J.R. Phase retrieval with transverse translation diversity: A nonlinear optimization approach. Opt. Express 2008, 16, 7264. [Google Scholar] [CrossRef] [PubMed]
- Maiden, A.; Humphry, M.; Sarahan, M.; Kraus, B.; Rodenburg, J. An annealing algorithm to correct positioning errors in ptychography. Ultramicroscopy 2012, 120, 64–72. [Google Scholar] [CrossRef]
- Zhang, F.; Peterson, I.; Vila-Comamala, J.; Diaz, A.; Berenguer, F.; Bean, R.; Chen, B.; Menzel, A.; Robinson, I.K.; Rodenburg, J.M. Translation position determination in ptychographic coherent diffraction imaging. Opt. Express 2013, 21, 13592. [Google Scholar] [CrossRef] [Green Version]
- Tripathi, A.; McNulty, I.; Shpyrko, O.G. Ptychographic overlap constraint errors and the limits of their numerical recovery using conjugate gradient descent methods. Opt. Express 2014, 22, 1452. [Google Scholar] [CrossRef]
- Mandula, O.; Elzo Aizarna, M.; Eymery, J.; Burghammer, M.; Favre-Nicolin, V. PyNX.Ptycho: A computing library for X-ray coherent diffraction imaging of nanostructures. J. Appl. Cryst. 2016, 49, 1842–1848. [Google Scholar] [CrossRef]
- Guzzi, F.; Kourousias, G.; Billè, F.; Pugliese, R.; Reis, C.; Gianoncelli, A.; Carrato, S. Refining scan positions in Ptychography through error minimisation and potential application of Machine Learning. J. Inst. 2018, 13, C06002. [Google Scholar] [CrossRef]
- Dwivedi, P.; Konijnenberg, A.; Pereira, S.; Urbach, H. Lateral position correction in ptychography using the gradient of intensity patterns. Ultramicroscopy 2018, 192, 29–36. [Google Scholar] [CrossRef]
- Guarnieri, G.; Fontani, M.; Guzzi, F.; Carrato, S.; Jerian, M. Perspective registration and multi-frame super-resolution of license plates in surveillance videos. Forensic Sci. Int. Digit. Investig. 2021, 36, 301087. [Google Scholar] [CrossRef]
- Guzzi, F.; Kourousias, G.; Gianoncelli, A.; Pascolo, L.; Sorrentino, A.; Billè, F.; Carrato, S. Improving a Rapid Alignment Method of Tomography Projections by a Parallel Approach. Appl. Sci. 2021, 11, 7598. [Google Scholar] [CrossRef]
- Loetgering, L.; Rose, M.; Keskinbora, K.; Baluktsian, M.; Dogan, G.; Sanli, U.; Bykova, I.; Weigand, M.; Schütz, G.; Wilhein, T. Correction of axial position uncertainty and systematic detector errors in ptychographic diffraction imaging. Opt. Eng. 2018, 57, 1. [Google Scholar] [CrossRef]
- Seifert, J.; Bouchet, D.; Loetgering, L.; Mosk, A.P. Efficient and flexible approach to ptychography using an optimization framework based on automatic differentiation. OSA Continuum 2021, 4, 121. [Google Scholar] [CrossRef]
- Bartholomew-Biggs, M.; Brown, S.; Christianson, B.; Dixon, L. Automatic differentiation of algorithms. J. Comput. Appl. Math. 2000, 124, 171–190. [Google Scholar] [CrossRef] [Green Version]
- Manzyuk, O.; Pearlmutter, B.A.; Radul, A.A.; Rush, D.R.; Siskind, J.M. Perturbation confusion in forward automatic differentiation of higher-order functions. J. Funct. Prog. 2019, 29, 153:1–153:43. [Google Scholar] [CrossRef] [Green Version]
- van Merrienboer, B.; Breuleux, O.; Bergeron, A.; Lamblin, P. Automatic differentiation in ML: Where we are and where we should be going. In Advances in Neural Information Processing Systems 31: Annual Conference on Neural Information Processing Systems 2018, NeurIPS 2018, Montréal, QC, Canada, 3–8 December 2018; Bengio, S., Wallach, H.M., Larochelle, H., Grauman, K., Cesa-Bianchi, N., Garnett, R., Eds.; NeurIPS: La Jolla, CA, USA, 2018; pp. 8771–8781. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. In Advances in Neural Information Processing Systems 32: NeurIPS 2019, Vancouver, BC, Canada, 8–14 December 2019; Wallach, H.M., Larochelle, H., Beygelzimer, A., d’Alché-Buc, F., Fox, E.B., Garnett, R., Eds.; NeurIPS: La Jolla, CA, USA, 2019; pp. 8024–8035. [Google Scholar]
- Paganin, D. Coherent X-Ray Optics; Oxford University Press: Oxford, UK, 2006. [Google Scholar] [CrossRef]
- Fischer, R.F.H. Precoding and Signal Shaping for Digital Transmission; John Wiley & Sons, Inc.: Chicago, IL, USA, 2002. [Google Scholar] [CrossRef]
- Guzzi, F.; De Bortoli, L.; Molina, R.S.; Marsi, S.; Carrato, S.; Ramponi, G. Distillation of an End-to-End Oracle for Face Verification and Recognition Sensors. Sensors 2020, 20, 1369. [Google Scholar] [CrossRef] [Green Version]
- Maiden, A.; Johnson, D.; Li, P. Further improvements to the ptychographical iterative engine. Optica 2017, 4, 736. [Google Scholar] [CrossRef]
- Jones, M.W.; Abbey, B.; Gianoncelli, A.; Balaur, E.; Millet, C.; Luu, M.B.; Coughlan, H.D.; Carroll, A.J.; Peele, A.G.; Tilley, L.; et al. Phase-diverse Fresnel coherent diffractive imaging of malaria parasite-infected red blood cells in the water window. Opt. Express 2013, 21, 32151. [Google Scholar] [CrossRef]
- Quiney, H. Coherent diffractive imaging using short wavelength light sources. J. Mod. Optic. 2010, 57, 1109–1149. [Google Scholar] [CrossRef]
- Stockmar, M.; Cloetens, P.; Zanette, I.; Enders, B.; Dierolf, M.; Pfeiffer, F.; Thibault, P. Near-field ptychography: Phase retrieval for inline holography using a structured illumination. Sci. Rep. 2013, 3, 1927. [Google Scholar] [CrossRef] [Green Version]
- Maiden, A.M.; Humphry, M.J.; Rodenburg, J.M. Ptychographic transmission microscopy in three dimensions using a multi-slice approach. J. Opt. Soc. Am. A 2012, 29, 1606. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guzzi, F.; Kourousias, G.; Gianoncelli, A.; Billè, F.; Carrato, S. A Parameter Refinement Method for Ptychography Based on Deep Learning Concepts. Condens. Matter 2021, 6, 36. https://doi.org/10.3390/condmat6040036
Guzzi F, Kourousias G, Gianoncelli A, Billè F, Carrato S. A Parameter Refinement Method for Ptychography Based on Deep Learning Concepts. Condensed Matter. 2021; 6(4):36. https://doi.org/10.3390/condmat6040036
Chicago/Turabian StyleGuzzi, Francesco, George Kourousias, Alessandra Gianoncelli, Fulvio Billè, and Sergio Carrato. 2021. "A Parameter Refinement Method for Ptychography Based on Deep Learning Concepts" Condensed Matter 6, no. 4: 36. https://doi.org/10.3390/condmat6040036
APA StyleGuzzi, F., Kourousias, G., Gianoncelli, A., Billè, F., & Carrato, S. (2021). A Parameter Refinement Method for Ptychography Based on Deep Learning Concepts. Condensed Matter, 6(4), 36. https://doi.org/10.3390/condmat6040036