
Implementation of an Enhanced Crayfish Optimization Algorithm


Abstract
1. Introduction
- (1)
- An enhanced crayfish optimization algorithm (ECOA) is proposed by mixing four improvement strategies. Halton sequence was introduced to improve the population initialization process of COA, which made the initial population distribution of crayfish more uniform and increased the initial population’s diversity and the early COA’s convergence rate. Before crayfish began to summer resort, compete, and predate, QOBL was applied to the COA population, which was conducive to increasing the search range of the population and improving the quality of candidate solutions to accelerate the convergence rate. There is a certain blindness in this process, and elite factors are introduced to guide the crayfish because crayfish can directly ingest food when the size of the food is appropriate. This paper introduces the fish device aggregation effect (FADs) in the marine predator algorithm (MPA) into the predation phase of crayfish to enhance the ability of COA to jump out of local optimality.
- (2)
- The proposed ECOA solves the widely used IEEE CEC2019 test function set and compares it with four standard swarm intelligence algorithms, four improved swarm intelligence algorithms, and crayfish optimization algorithms, respectively. Five experiments were carried out: numerical experiment, iterative curve analysis, box plot analysis, the Wilcoxon rank sum test, and ablation experiments. The experimental results show that the proposed ECOA is competitive and compared to similar algorithms, it has faster convergence speed, higher convergence accuracy, and stronger ability to jump out of local optima.
- (3)
- Using the ECOA for practical optimization problems in the three-bar truss design and pressure vessels design, and comparing it with other algorithms. The ECOA shows higher convergence accuracy, faster convergence speed, and higher stability compared to other algorithms.
2. The Crayfish Optimization Algorithm (COA)
2.1. Population Initialization
2.2. Define Temperature and Crawfish Food Intake
2.3. Summer Phase
2.4. Competition Phase
2.5. Predation Stage
3. The Enhanced Crayfish Optimization Algorithm (ECOA)
3.1. Halton Sequence Population Initialization
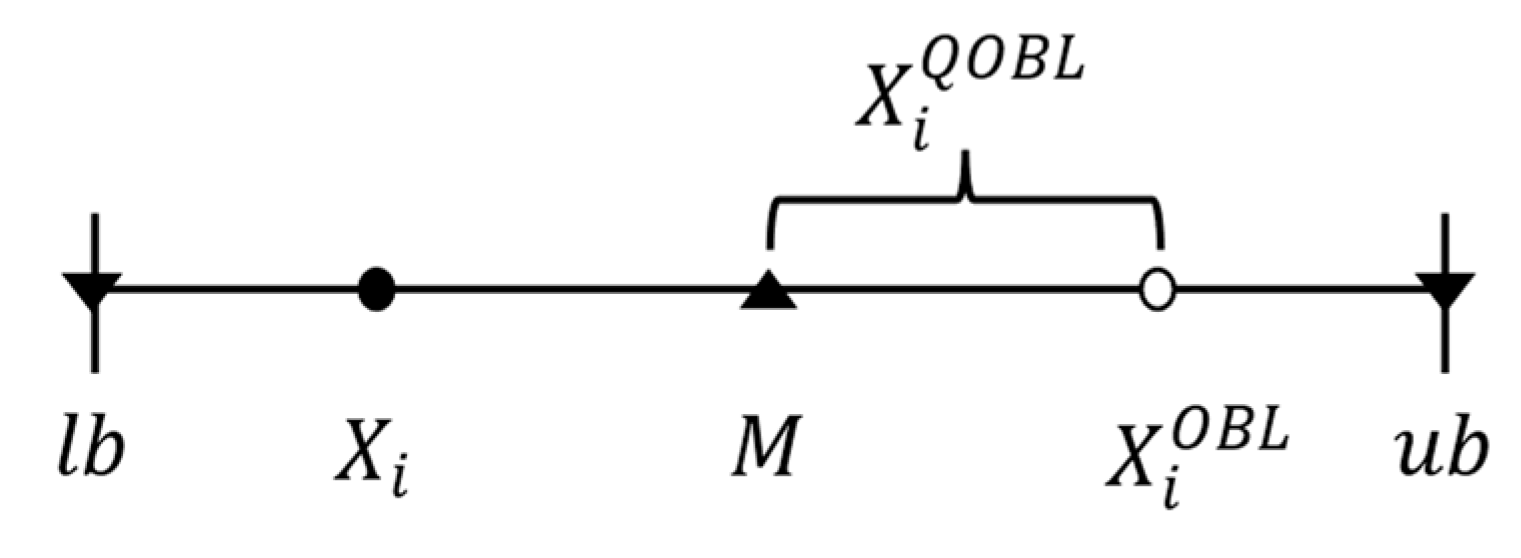
3.2. Quasi Opposition-Based Learning
3.3. Elite Steering Factor
3.4. Vortex Formation and Fish Aggregation Device Effect
3.5. Pseudo-Code of the ECOA
| Algorithm 1. The pseudo-code of the ECOA |
| Initialize population size , number of iterations , problem dimension for = 1: for = 1: Generate the initial population individual position according to Equation (15) end end Calculate the fitness value of the population to obtain the values of and While < Define the ambient temperature through Equation (3) for = 1: Crayfish perform QOBL according to Equation (18) end Choosing to retain crayfish populations with better fitness for the next generation if > 30 Define the cave location according to Equation (5) if 0.5 Crayfish undergo the summer retreat stage according to Equation (6) else Crayfish compete in stages according to Equation (8) end else Define food intake and size through Equations (4) and (11), respectively if > 2 Crayfish shred food according to Equation (12) Crayfish ingest food according to Equation (13) else Crayfish can directly consume food according to Equation (19) if < The position of crayfish remains unchanged else Update the effect of crayfish based on Equation (20) end end end Perform boundary processing Update fitness values, and values = + 1 end |
3.6. Analysis of Computational Time Complexity of the ECOA
4. The ECOA Effectiveness Test Experiment
4.1. Experimental Scheme
4.2. Numerical Experiment and Analysis
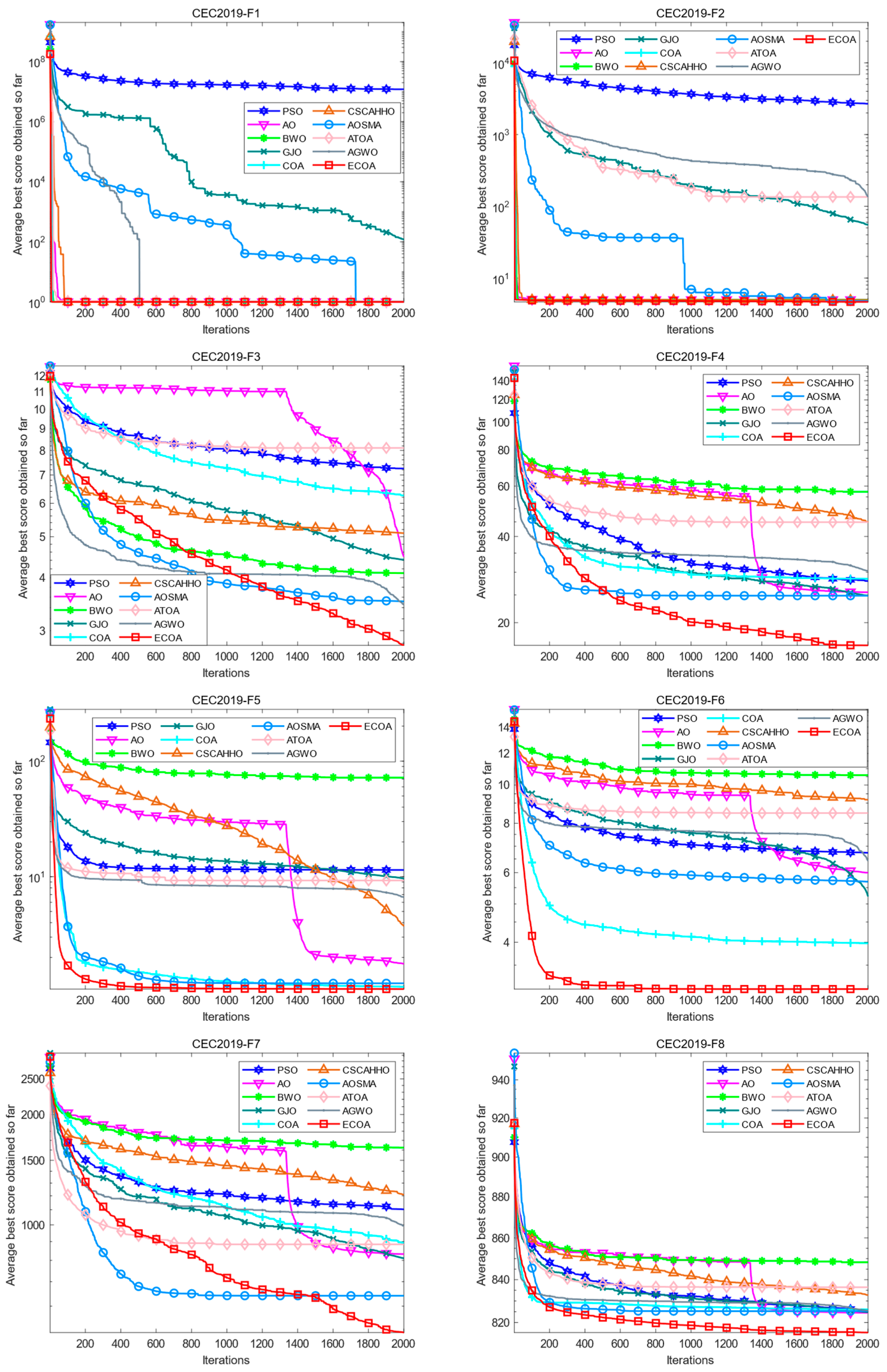
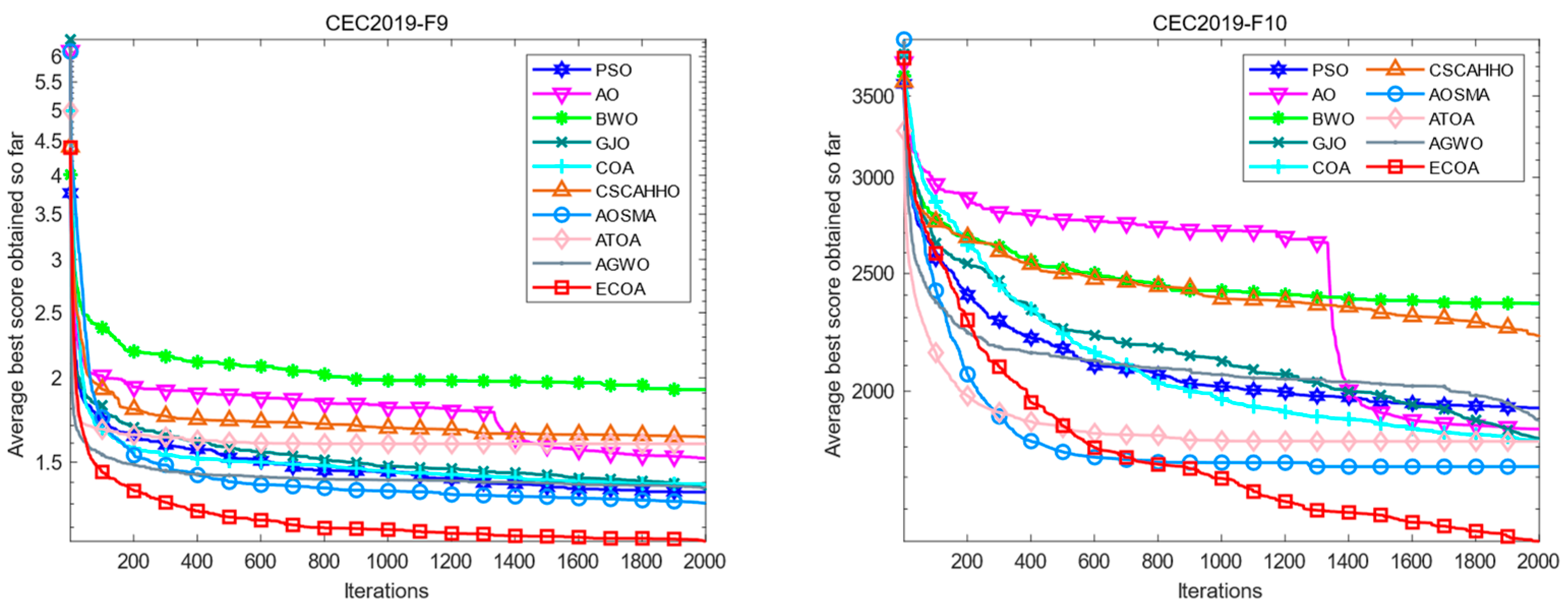
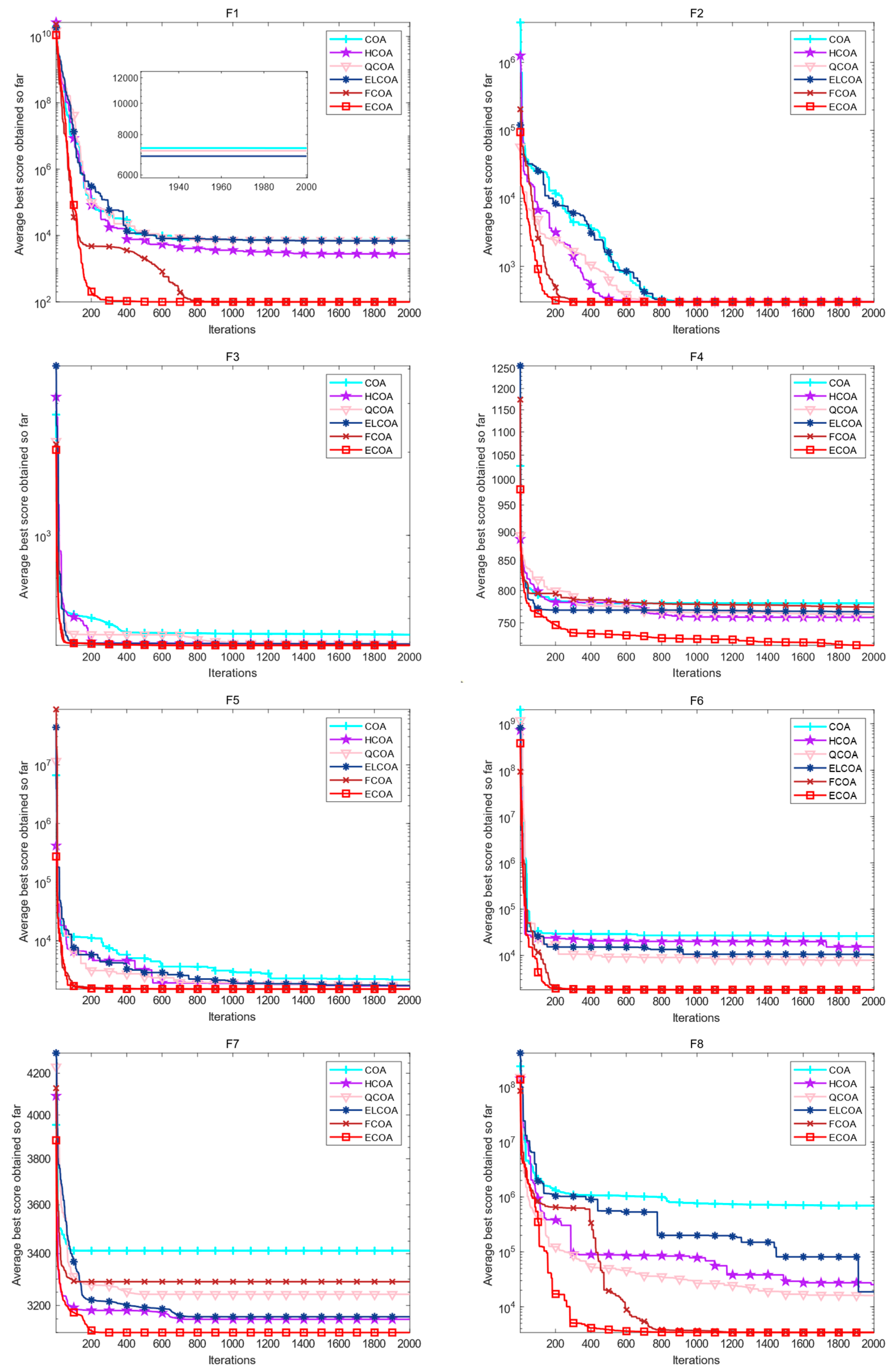
4.3. Iterative Curve Analysis
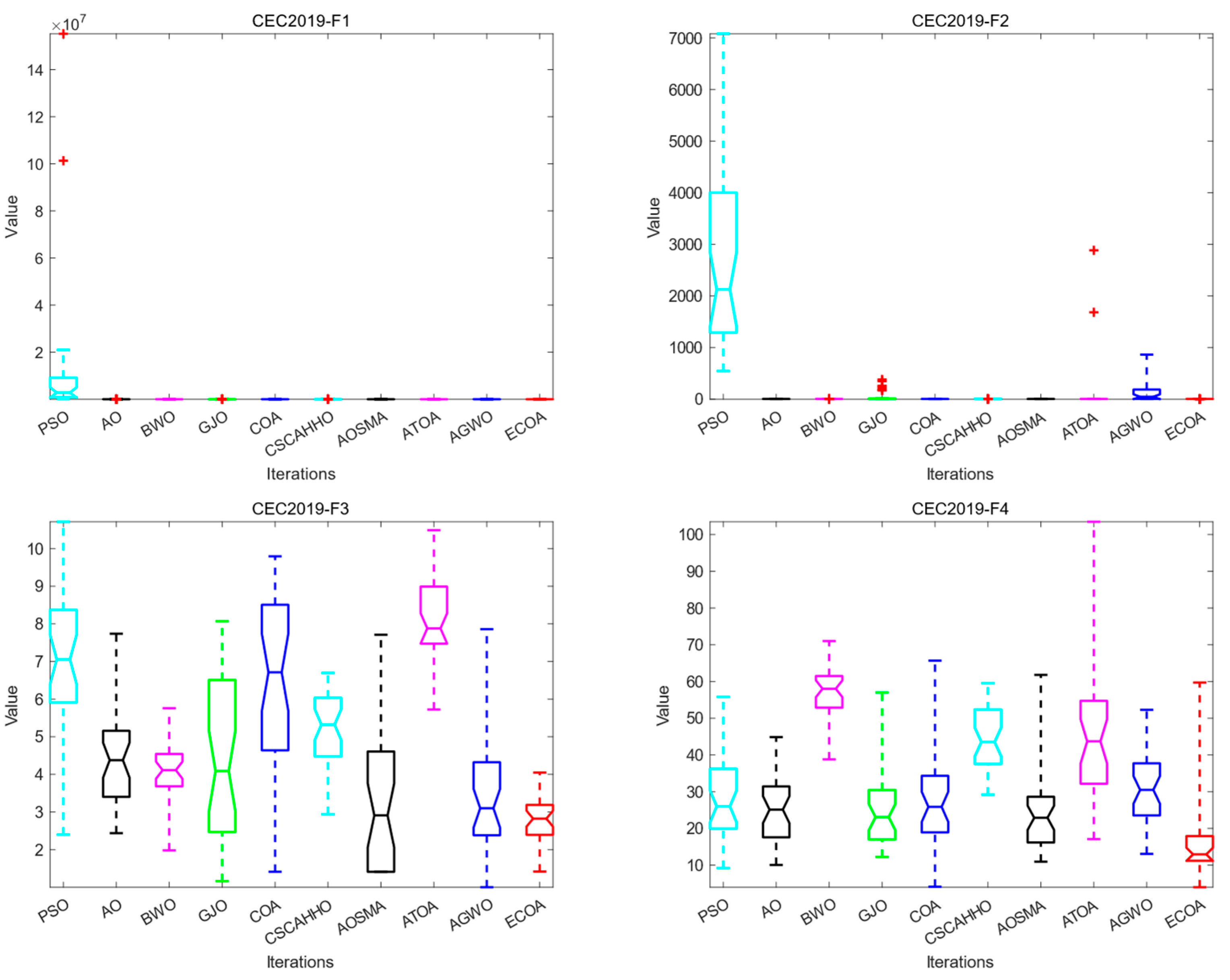
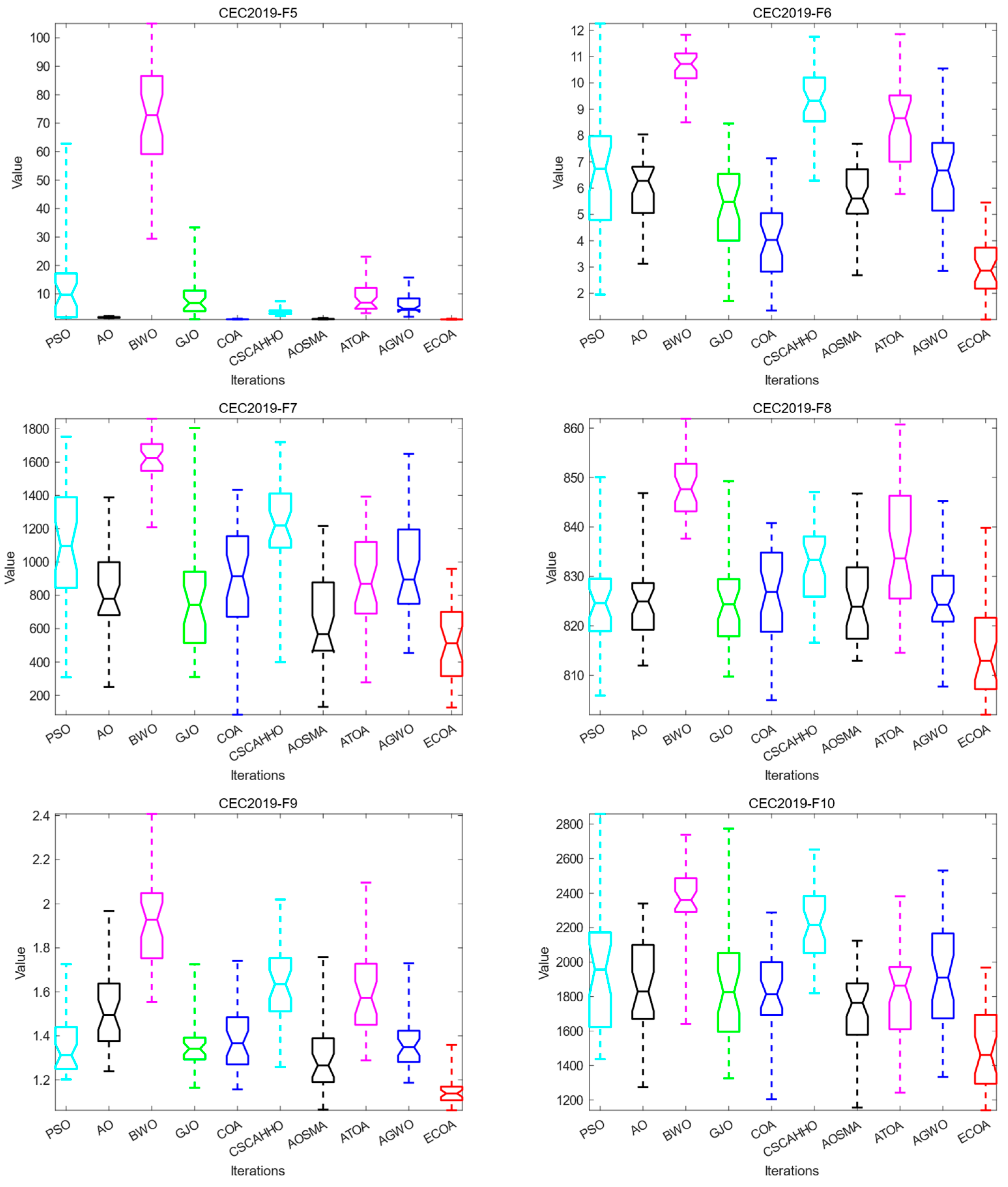
4.4. Box Plot Analysis
4.5. The Wilcoxon Rank Sum Test
4.6. Analysis of Ablation Experiments
5. Practical Engineering Optimization Experiment
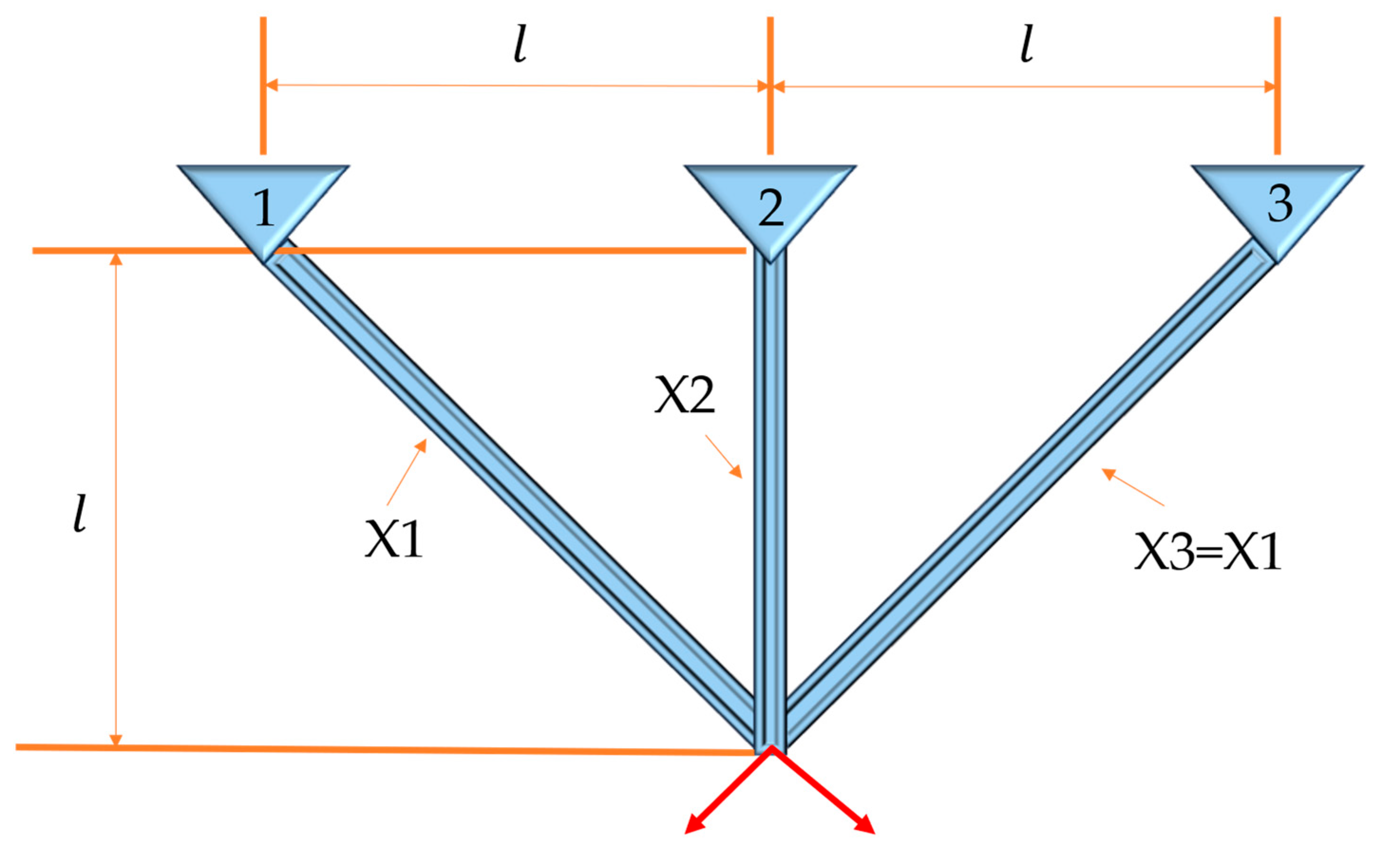
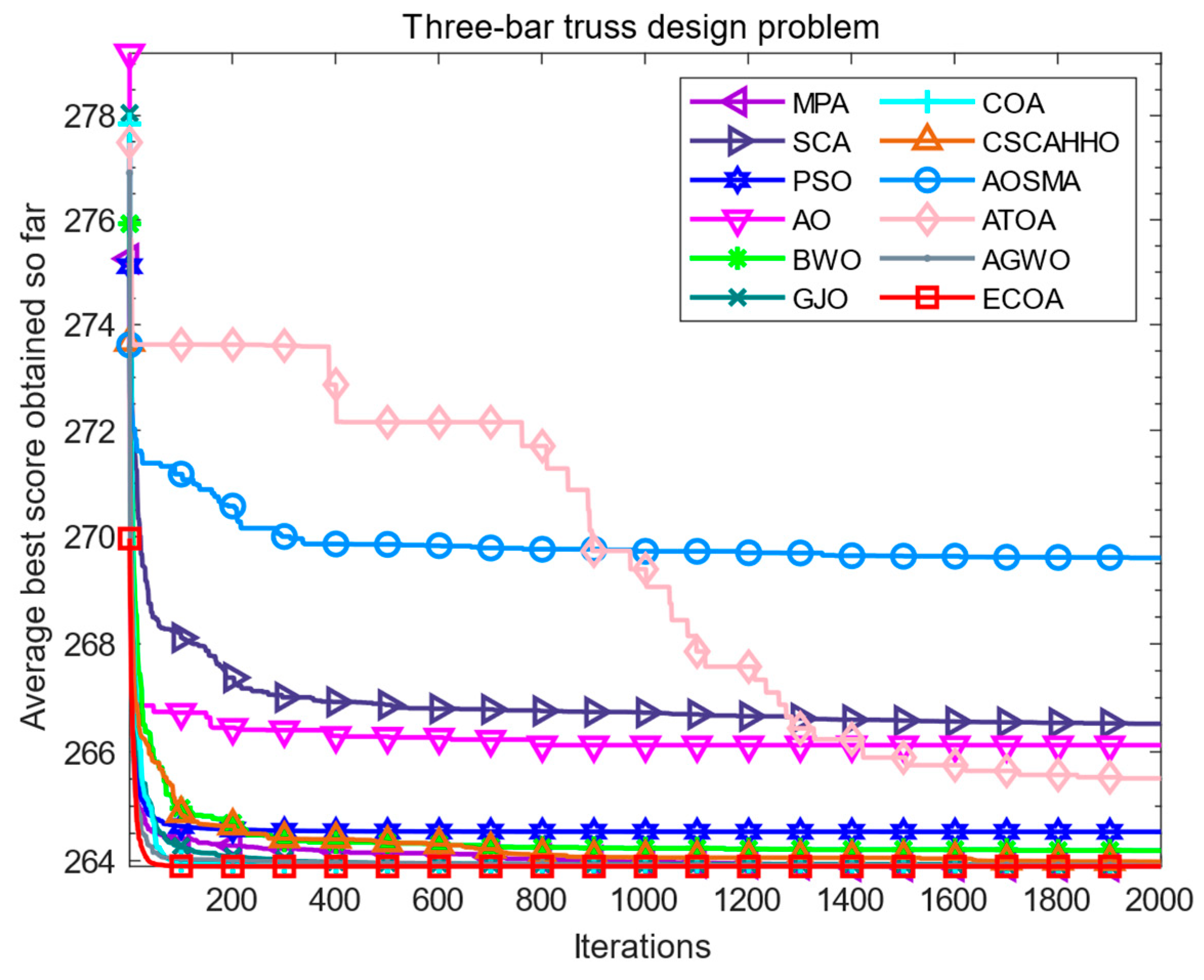
5.1. Three-Bar Truss Design Problem
5.2. Pressure Vessel Design
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, G.; Zhong, J.; Du, B.; Wei, G. An enhanced hybrid arithmetic optimization algorithm for engineering applications. Comput. Methods Appl. Mech. Eng. 2022, 394, 114901. [Google Scholar] [CrossRef]
- Jiang, Y.; Yin, S.; Dong, J.; Kaynak, O. A Review on Soft Sensors for Monitoring, Control, and Optimization of Industrial Processes. IEEE Sens. J. 2021, 21, 12868–12881. [Google Scholar] [CrossRef]
- Cosic, A.; Stadler, M.; Mansoor, M.; Zellinger, M. Mixed-integer linear programming based optimization strategies for renewable energy communities. Energy 2021, 237, 121559. [Google Scholar] [CrossRef]
- Shen, Y.; Branscomb, D. Orientation optimization in anisotropic materials using gradient descent method. Compos. Struct. 2020, 234, 111680. [Google Scholar] [CrossRef]
- Xu, Z.; Geng, H.; Chu, B. A Hierarchical Data–Driven Wind Farm Power Optimization Approach Using Stochastic Projected Simplex Method. IEEE Trans. Smart Grid 2021, 12, 3560–3569. [Google Scholar] [CrossRef]
- Mavrovouniotis, M.; Li, C.; Yang, S. A survey of swarm intelligence for dynamic optimization: Algorithms and applications. Swarm Evol. Comput. 2017, 33, 1–17. [Google Scholar] [CrossRef]
- Tang, J.; Liu, G.; Pan, Q. A Review on Representative Swarm Intelligence Algorithms for Solving Optimization Problems: Applications and Trends. IEEE/CAA J. Autom. Sin. 2021, 8, 1627–1643. [Google Scholar] [CrossRef]
- Li, W.; Wang, G.-G.; Gandomi, A.H. A Survey of Learning-Based Intelligent Optimization Algorithms. Arch. Comput. Methods Eng. 2021, 28, 3781–3799. [Google Scholar] [CrossRef]
- El-Kenawy, E.-S.M.; Khodadadi, N.; Mirjalili, S.; Abdelhamid, A.A.; Eid, M.M.; Ibrahim, A. Greylag Goose Optimization: Nature-inspired optimization algorithm. Expert Syst. Appl. 2024, 238, 122147. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimizationtimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Elseify, M.A.; Hashim, F.A.; Hussien, A.G.; Kamel, S. Single and multi-objectives based on an improved golden jackal optimization algorithm for simultaneous integration of multiple capacitors and multi-type DGs in distribution systems. Appl. Energy 2024, 353, 122054. [Google Scholar] [CrossRef]
- Moazen, H.; Molaei, S.; Farzinvash, L.; Sabaei, M. PSO-ELPM: PSO with elite learning, enhanced parameter updating, and exponential mutation operator. Inf. Sci. 2023, 628, 70–91. [Google Scholar] [CrossRef]
- Shen, Y.; Zhang, C.; Gharehchopogh, F.S.; Mirjalili, S. An improved whale optimization algorithm based on multi-population evolution for global optimization and engineering design problems. Expert Syst. Appl. 2023, 215, 119269. [Google Scholar] [CrossRef]
- Zhu, F.; Li, G.; Tang, H.; Li, Y.; Lv, X.; Wang, X. Dung beetle optimization algorithm based on quantum computing and multi-strategy fusion for solving engineering problems. Expert Syst. Appl. 2024, 236, 121219. [Google Scholar] [CrossRef]
- Zhang, X.; Sang, H.; Li, Z.; Zhang, B.; Meng, L. An efficient discrete artificial bee colony algorithm with dynamic calculation method for solving the AGV scheduling problem of delivery and pickup. Complex Intell. Syst. 2024, 10, 37–57. [Google Scholar] [CrossRef]
- Yang, Y.; Qiu, J.; Qin, Z. Multidimensional Firefly Algorithm for Solving Day-Ahead Scheduling Optimization in Microgrid. J. Electr. Eng. Technol. 2021, 16, 1755–1768. [Google Scholar] [CrossRef]
- Song, Q.; Zhao, Q.; Wang, S.; Liu, Q.; Chen, X. Dynamic Path Planning for Unmanned Vehicles Based on Fuzzy Logic and Improved Ant Colony Optimization. IEEE Access 2020, 8, 62107–62115. [Google Scholar] [CrossRef]
- Kalita, K.; Ramesh, J.V.N.; Cepova, L.; Pandya, S.B.; Jangir, P.; Abualigah, L. Multi-objective exponential distribution optimizer (MOEDO): A novel math-inspired multi-objective algorithm for global optimization and real-world engineering design problems. Sci. Rep. 2024, 14, 1816. [Google Scholar] [CrossRef]
- Al Aghbari, Z.; Raj, P.V.P.; Mostafa, R.R.; Khedr, A.M. iCapS-MS: An improved Capuchin Search Algorithm-based mobile-sink sojourn location optimization and datdata collection scheme for Wireless Sensor Networks. Neural Comput. Appl. 2024, 36, 8501–8517. [Google Scholar] [CrossRef]
- Jia, H.; Rao, H.; Wen, C.; Mirjalili, S. Crayfish optimization algorithm. Artif. Intell. Rev. 2023, 56 (Suppl. S2), 1919–1979. [Google Scholar] [CrossRef]
- Li, Q.; Liu, S.-Y.; Yang, X.-S. Influence of initialization on the performance of metaheuristic optimizers. Appl. Soft Comput. 2020, 91, 106193. [Google Scholar] [CrossRef]
- Wei, F.; Zhang, Y.; Li, J. Multi-strategy-based adaptive sine cosine algorithm for engineering optimization problems. Expert Syst. Appl. 2024, 248, 123444. [Google Scholar] [CrossRef]
- Halton, J.H. Algorithm 247: Radical-inverse quasi-random point sequence. Commun. ACM 1964, 7, 701–702. [Google Scholar] [CrossRef]
- Tizhoosh, H.R. Opposition-Based Learning: A New Scheme for Machine Intelligence. In Proceedings of the International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce (CIMCA-IAWTIC’06), Vienna, Austria, 28–30 November 2005; pp. 695–701. [Google Scholar] [CrossRef]
- Truonga, K.H.; Nallagownden, P.; Baharudin, Z.; Vo, D.N. A Quasi-Oppositional-Chaotic Symbiotic Organisms Search algorithm for global optimization problems. Appl. Soft Comput. 2019, 77, 567–583. [Google Scholar] [CrossRef]
- Yang, X.; Hao, X.; Yang, T.; Li, Y.; Zhang, Y.; Wang, J. Elite-guided multi-objective cuckoo search algorithm based on crossover operation and information enhancement. Soft Comput. 2023, 27, 4761–4778. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine Predators Algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Zhang, M.; Tan, K.C. Conference Report on 2019 IEEE Congress on Evolutionary Computation (IEEE CEC 2019). IEEE Comput. Comput. Intell. Mag. 2020, 15, 4–5. [Google Scholar] [CrossRef]
- Abualigah, L.; Yousri, D.; Elaziz, M.A.; Ewees, A.A.; Al-Qaness, M.A.A.; Gandomi, A.H. Aquila Optimizer: A novel meta-heuristic optimization algorithm. Comput. Ind. Eng. 2021, 157, 107250. [Google Scholar] [CrossRef]
- Zhong, C.; Li, G.; Meng, Z. Beluga whale optimization: A novel nature-inspired metaheuristic algorithm. Knowl. -Based Syst. 2022, 251, 109215. [Google Scholar] [CrossRef]
- Chopra, N.; Ansari, M.M. Golden jackal optimization: A novel nature-inspired optimizer for engineering applications. Expert Syst. Appl. 2022, 198, 116924. [Google Scholar] [CrossRef]
- Zhang, Y.-J.; Yan, Y.-X.; Zhao, J.; Gao, Z.-M. CSCAHHO: Chaotic hybridization algorithm of the Sine Cosine with Harris Hawk optimization algorithms for solving global optimization problems. PLoS ONE 2022, 17, e0263387. [Google Scholar] [CrossRef]
- Naik, M.K.; Panda, R.; Abraham, A. Adaptive opposition slime mould algorithm. Soft Comput. 2021, 25, 14297–14313. [Google Scholar] [CrossRef]
- Devan, P.A.M.; Hussin, F.A.; Ibrahim, R.B.; Bingi, K.; Nagarajapandian, M.; Assaad, M. An Arithmetic-Trigonometric Optimization Algorithm with Application for Control of Real-Time Pressure Process Plant. Sensors 2022, 22, 617. [Google Scholar] [CrossRef]
- Meidani, K.; Hemmasian, A.; Mirjalili, S.; Farimani, A.B. Adaptive grey wolf optimizer. Neural Comput. Appl. 2022, 34, 7711–7731. [Google Scholar] [CrossRef]
- Streit, M.; Gehlenborg, N. Bar charts and box plots. Nat. Methods 2014, 11, 117. [Google Scholar] [CrossRef]
- Bo, Q.; Cheng, W.; Khishe, M. Evolving chimp optimization algorithm by weighted opposition-based technique and greedy search for multimodal engineering problems. Appl. Soft Comput. 2023, 132, 109869. [Google Scholar] [CrossRef]
- Zhang, S.-W.; Wang, J.-S.; Li, Y.-X.; Zhang, S.-H.; Wang, Y.-C.; Wang, X.-T. Improved honey badger algorithm based on elementary function density factors and mathematical spirals in polar coordinate systema. Artif. Intell. Rev. 2024, 57, 55. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Name | Search Range | Optimum | |
|---|---|---|---|---|
| F1 | Storn’s Chebyshev Polynomial Fitting Problem | 9 | [−8192, 8192] | 1 |
| F2 | Inverse Hilbert Matrix Problem | 16 | [−16,384, 16,384] | 1 |
| F3 | Lennard–Jones Minimum Energy Cluster | 18 | [−4, 4] | 1 |
| F4 | Rastrigin’s Function | 10 | [−100, 100] | 1 |
| F5 | Griewangk’s Function | 10 | [−100, 100] | 1 |
| F6 | Weierstrass Function | 10 | [−100, 100] | 1 |
| F7 | Modified Schwefel’s Function | 10 | [−100, 100] | 1 |
| F8 | Expanded Schaffer’s F6 Function | 10 | [−100, 100] | 1 |
| F9 | Happy Cat Function | 10 | [−100, 100] | 1 |
| F10 | Ackley Function | 10 | [−100, 100] | 1 |
| Algorithms | Parameters |
|---|---|
| PSO | = 0.9, C1 = C2 = 2 |
| AO | = 0.1 |
| BWO | Probability of whale fall decreased at interval |
| GJO | |
| COA | , |
| CSCAHHO | |
| AOSMA | = 0.03 |
| ATOA | |
| AGWO | damping when F is not decreasing significantly |
| ECOA | = 0.2 |
| CEC2019 | Value | PSO | AO | BWO | GJO | COA | CSCAHHO | AOSMA | ATOA | AGWO | ECOA |
|---|---|---|---|---|---|---|---|---|---|---|---|
| F1 | Best | 1.361 × 10+5 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| Mean | 1.202 × 10+7 | 1 | 1 | 120.2597 | 1 | 1 | 1 | 1 | 1 | 1 | |
| Std | 3.027 × 10+7 | 1.135 × 10−9 | 0 | 642.788 | 0 | 9.879 × 10−11 | 0 | 0 | 0 | 0 | |
| F2 | Best | 545.9192 | 5 | 4.8556 | 4.2197 | 4.0557 | 4.2739 | 4.2316 | 4.4755 | 4.2174 | 3.2141 |
| Mean | 2689.1055 | 5 | 4.9935 | 55.3157 | 4.8087 | 4.9449 | 4.7893 | 135.0859 | 133.871 | 4.6568 | |
| Std | 1741.3001 | 0 | 0.027086 | 106.4349 | 0.33374 | 0.17328 | 0.32882 | 556.0031 | 194.2698 | 0.64381 | |
| F3 | Best | 2.3979 | 2.4361 | 1.9805 | 1.1634 | 1.4104 | 2.9411 | 1.4091 | 5.7234 | 1.0004 | 1.4173 |
| Mean | 7.2501 | 4.4884 | 4.103 | 4.4136 | 6.2606 | 5.0994 | 3.517 | 8.1086 | 3.462 | 2.7698 | |
| Std | 1.9616 | 1.2868 | 0.766 | 2.2871 | 2.6603 | 1.0752 | 2.2299 | 1.2277 | 1.532 | 0.62451 | |
| F4 | Best | 9.2209 | 10.0576 | 38.8009 | 12.248 | 4.1414 | 29.1901 | 10.9496 | 17.0898 | 13.0603 | 3.9849 |
| Mean | 27.9446 | 25.5342 | 57.3153 | 24.843 | 28.4397 | 44.8217 | 24.8393 | 44.8809 | 30.3264 | 16.6629 | |
| Std | 11.0734 | 8.7901 | 6.9365 | 10.7428 | 15.7463 | 8.8591 | 11.3231 | 16.7632 | 9.5238 | 11.1345 | |
| F5 | Best | 1.5511 | 1.4833 | 29.405 | 1.1339 | 1.0497 | 2.1918 | 1.0246 | 3.2675 | 1.9698 | 1.0074 |
| Mean | 11.428 | 1.7597 | 72.0211 | 9.5542 | 1.115 | 3.7237 | 1.194 | 9.2733 | 6.6392 | 1.0641 | |
| Std | 13.5064 | 0.18663 | 19.4782 | 9.0179 | 0.061305 | 1.1233 | 0.11646 | 5.8361 | 3.8098 | 0.050987 | |
| F6 | Best | 1.9552 | 3.1214 | 8.5015 | 1.7038 | 1.3443 | 6.2846 | 2.6872 | 5.7768 | 2.8508 | 1.0041 |
| Mean | 6.7367 | 5.9982 | 10.5902 | 5.2258 | 3.9784 | 9.1707 | 5.6918 | 8.4921 | 6.4251 | 3.0444 | |
| Std | 2.4593 | 1.2484 | 0.77804 | 1.7237 | 1.5453 | 1.3384 | 1.3033 | 1.6149 | 1.7536 | 1.268 | |
| F7 | Best | 308.3668 | 249.3434 | 1208.3006 | 309.9122 | 83.4932 | 399.241 | 130.7135 | 278.2579 | 453.8124 | 126.6386 |
| Mean | 1102.4747 | 832.3015 | 1623.6728 | 810.9943 | 894.644 | 1206.1076 | 640.6508 | 884.6521 | 994.0343 | 508.5085 | |
| Std | 355.712 | 265.7038 | 130.0862 | 376.0119 | 339.8851 | 290.3894 | 277.6008 | 269.8459 | 298.1859 | 230.6677 | |
| F8 | Best | 805.925 | 811.9902 | 837.6275 | 809.7835 | 804.9748 | 816.6299 | 812.9345 | 814.5553 | 807.7328 | 802.0457 |
| Mean | 825.7583 | 824.5015 | 848.2828 | 824.7693 | 825.9996 | 832.6092 | 825.2471 | 836.4446 | 825.521 | 815.3867 | |
| Std | 10.1005 | 7.4753 | 6.0262 | 9.2526 | 8.9454 | 8.4370 | 8.9263 | 13.1182 | 7.8571 | 9.9757 | |
| F9 | Best | 1.1616 | 1.1532 | 1.5475 | 1.2025 | 1.1683 | 1.3514 | 1.0538 | 1.1977 | 1.2129 | 1.0359 |
| Mean | 1.3579 | 1.4924 | 1.9341 | 1.3228 | 1.3786 | 1.6591 | 1.2842 | 1.6030 | 1.3956 | 1.1378 | |
| Std | 0.0999 | 0.1697 | 0.1336 | 0.0928 | 0.1442 | 0.1545 | 0.1223 | 0.2205 | 0.1129 | 0.0522 | |
| F10 | Best | 1436.99 | 1274.08 | 1641.75 | 1325.81 | 1204.19 | 1818.69 | 1155.34 | 1241.95 | 1333.24 | 1139.99 |
| Mean | 1937.94 | 1861.89 | 2362.49 | 1828.64 | 1819.19 | 2217.23 | 1733.81 | 1819.03 | 1892.962 | 1505.39 | |
| Std | 349.35 | 275.94 | 194.21 | 344.89 | 267.68 | 216.92 | 214.91 | 268.69 | 309.42 | 229.69 |
| CEC2019 | PSO | AO | BWO | GJO | COA | CSCAHHO | AOSMA | ATOA | AGWO |
|---|---|---|---|---|---|---|---|---|---|
| F1 | 1.534 × 10−14 | 3.706 × 10−4 | N/A | 1.534 × 10−14 | N/A | 2.527 × 10−10 | N/A | N/A | N/A |
| F2 | 1.322 × 10−13 | 3.017 × 10−3 | 3.031 × 10−3 | 2.943 × 10−2 | 7.786 × 10−1 | 3.253 × 10−1 | 9.044 × 10−1 | 8.363 × 10−2 | 1.162 × 10−7 |
| F3 | 5.851 × 10−12 | 2.255 × 10−8 | 2.789 × 10−9 | 7.939 × 10−3 | 2.678 × 10−7 | 1.438 × 10−11 | 8.325 × 10−1 | 6.545 × 10−13 | 5.119 × 10−2 |
| F4 | 6.466 × 10−6 | 7.221 × 10−6 | 3.865 × 10−12 | 6.834 × 10−5 | 6.189 × 10−5 | 9.661 × 10−11 | 7.922 × 10−5 | 2.254 × 10−10 | 1.955 × 10−7 |
| F5 | 6.545 × 10−13 | 6.545 × 10−13 | 6.545 × 10−13 | 7.132 × 10−13 | 2.477 × 10−5 | 6.545 × 10−13 | 2.248 × 10−9 | 6.545 × 10−13 | 6.545 × 10−13 |
| F6 | 4.928 × 10−9 | 2.625 × 10−10 | 6.545 × 10−13 | 1.156 × 10−6 | 1.044 × 10−2 | 6.545 × 10−13 | 1.565 × 10−9 | 6.545 × 10−13 | 2.625 × 10−10 |
| F7 | 7.510 × 10−10 | 6.118 × 10−6 | 6.545 × 10−13 | 5.536 × 10−4 | 2.204 × 10−6 | 2.527 × 10−11 | 6.689 × 10−2 | 4.399 × 10−7 | 1.307 × 10−8 |
| F8 | 1.413 × 10−4 | 9.620 × 10−5 | 7.761 × 10−13 | 2.363 × 10−4 | 2.608 × 10−5 | 1.399 × 10−8 | 5.327 × 10−5 | 8.626 × 10−9 | 3.935 × 10−5 |
| F9 | 5.851 × 10−12 | 2.342 × 10−12 | 6.545 × 10−13 | 4.566 × 10−12 | 5.388 × 10−12 | 6.545 × 10−13 | 2.761 × 10−8 | 1.191 × 10−12 | 1.411 × 10−12 |
| F10 | 5.620 × 10−7 | 1.852 × 10−6 | 1.819 × 10−12 | 4.357 × 10−5 | 4.628 × 10−6 | 2.342 × 10−12 | 1.348 × 10−4 | 9.498 × 10−6 | 1.090 × 10−6 |
| −/=/+ | 0/0/10 | 0/0/10 | 0/1/9 | 0/0/10 | 0/2/8 | 0/1/9 | 0/4/6 | 0/2/8 | 0/2/8 |
| Function Type | Function Number | Name | Dimension | Theoretical Optimal Value |
|---|---|---|---|---|
| Unimodal function | CEC2017-F1 | Shifted and rotated bent cigar function | 10 | 100 |
| CEC2017-F2 | Shifted and rotated zakharov function | 10 | 300 | |
| Multimodal function | CEC2017-F3 | Shifted and rotated Rosenbrock’s function | 10 | 400 |
| CEC2017-F4 | Shifted and rotated lunacek Bi_Rastrigin | 10 | 700 | |
| Hybrid function | CEC2017-F5 | Hybrid function 5 (N = 4) | 10 | 1500 |
| CEC2017-F6 | Hybrid function 6 (N = 5) | 10 | 1800 | |
| Composition function | CEC2017-F7 | Composition function 8 (N = 6) | 10 | 2800 |
| CEC2017-F8 | Composition function 10 (N = 3) | 10 | 3000 |
| Algorithms | Decision Variables | Best | Mean | Std | |
|---|---|---|---|---|---|
| X1 | X2 | ||||
| MPA | 0.788543661 | 0.408621746 | 263.8958 | 263.8960 | 2.2142 × 10−4 |
| SCA | 0.817087569 | 0.354123484 | 263.9162 | 266.5196 | 6.5123 |
| PSO | 0.795645656 | 0.394874029 | 263.8959 | 264.5300 | 3.4587 |
| AO | 0.759197479 | 0.513909988 | 264.0598 | 266.1245 | 2.0766 |
| BWO | 0.789321915 | 0.409324881 | 263.8969 | 264.1864 | 0.2262 |
| GJO | 0.789507917 | 0.405951715 | 263.8961 | 263.9017 | 0.0048061 |
| COA | 0.788604706 | 0.408449023 | 263.8959 | 263.8960 | 1.3825 × 10−4 |
| CSCAHHO | 0.790860857 | 0.402928576 | 263.8959 | 263.9821 | 0.11688 |
| AOSMA | 0.735818117 | 0.614832778 | 264.1893 | 269.6041 | 2.1968 |
| ATOA | 0.822192305 | 0.329610280 | 263.9000 | 265.5121 | 2.2217 |
| AGWO | 0.788828845 | 0.407890221 | 263.8972 | 263.9035 | 0.0067363 |
| ECOA | 0.788675135 | 0.408248289 | 263.8958 | 263.8958 | 1.7345 × 10−13 |
| Algorithms | Decision Variables | Best | Mean | Std | |||
|---|---|---|---|---|---|---|---|
| Th | Ts | L | R | ||||
| MPA | 0.384649163 | 0.778168641 | 200 | 40.31961872 | 5885.3328 | 5885.3328 | 5.3255 × 10−13 |
| SCA | 0.499291880 | 0.925842231 | 146.4048851 | 46.38243053 | 5984.1873 | 6717.5887 | 563.3545 |
| PSO | 0.485368191 | 0.971227746 | 119.8348813 | 50.22748055 | 5887.8888 | 6471.8242 | 667.9827 |
| AO | 0.507963654 | 1.000199547 | 101.8941606 | 51.19045001 | 6099.8767 | 6649.8309 | 433.1601 |
| BWO | 0.475536871 | 0.888263455 | 155.1896217 | 44.84373326 | 5936.4947 | 6469.8463 | 340.4535 |
| GJO | 0.461282896 | 0.928624719 | 132.504745 | 48.0893052 | 5890.1495 | 6298.0075 | 527.7598 |
| COA | 0.42204187 | 0.846150966 | 161.1823893 | 43.80603079 | 5886.7775 | 6050.5243 | 202.9679 |
| CSCAHHO | 0.609416381 | 1.236751933 | 46.25754118 | 59.24840347 | 6085.6621 | 7694.8483 | 900.2840 |
| AOSMA | 0.492061006 | 0.995469322 | 103.7860047 | 51.57872133 | 5890.4997 | 6475.3967 | 587.2016 |
| ATOA | 0.865903331 | 1.885676384 | 51.10292644 | 84.14450431 | 6843.7044 | 26,244.2365 | 26,733.8240 |
| AGWO | 0.473362091 | 0.950451055 | 124.8342301 | 49.17678664 | 5895.6772 | 6376.1675 | 567.2517 |
| ECOA | 0.384649163 | 0.778168641 | 200 | 40.31961872 | 5885.3328 | 5885.3328 | 1.6889 × 10−13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Liu, P.; Li, Y. Implementation of an Enhanced Crayfish Optimization Algorithm. Biomimetics 2024, 9, 341. https://doi.org/10.3390/biomimetics9060341
Zhang Y, Liu P, Li Y. Implementation of an Enhanced Crayfish Optimization Algorithm. Biomimetics. 2024; 9(6):341. https://doi.org/10.3390/biomimetics9060341
Chicago/Turabian StyleZhang, Yi, Pengtao Liu, and Yanhong Li. 2024. "Implementation of an Enhanced Crayfish Optimization Algorithm" Biomimetics 9, no. 6: 341. https://doi.org/10.3390/biomimetics9060341
APA StyleZhang, Y., Liu, P., & Li, Y. (2024). Implementation of an Enhanced Crayfish Optimization Algorithm. Biomimetics, 9(6), 341. https://doi.org/10.3390/biomimetics9060341