1. Introduction
Low back injuries have been problems continuously in industrial workplace for decades. Repetitive manual handling leads to muscle fatigue in the back muscles, resulting in low back injuries [
1,
2,
3]. Moreover, ligament damage and injuries caused by low back muscle fatigue and low back injury contribute to low back pain [
4]. Low back injuries take half of low back-related musculoskeletal disorders [
5]. As a result of those injuries, the quality of life of workers decreased [
6], as well as causing social issues. The costs associated with back pain have continuously risen, and are expected to continue increasing in the coming decades [
7]. Overall, low back pain caused by manual material handling significantly limits the physical activity of workers and generates broader societal concerns.
To address these concerns, back-support exoskeletons have been developed, which can reduce the burden on the lower back to prevent low back injuries. Many researchers have developed and verified the effect of various back support exoskeletons, which can be divided into two types of assistive force generating devices: active and passive. Active type back-support exoskeletons use active components like powered actuators as a source of assistive force, such as electric motors [
8,
9]. On the contrary, passive type back-support exoskeletons use passive components, such as coil or gas springs [
10,
11], to generate assistive force. For example, H-Wex and XoTrunk, which are active back-support exoskeletons using BLDC motors, can support manual material lifting tasks by providing assistive torque to the hip joint [
12,
13]. Laevo, a passive back-support exoskeleton, can assist manual material lifting tasks by providing assistive force through a thigh cuff using a gas spring and cam [
14]. SPEXOR, another passive back-support exoskeleton, assists in the sagittal plane motion of manual material lifting by providing assistive torque to both the hip joint and the L5S1 joint, using a coil spring system and flexible carbon beam [
15,
16].
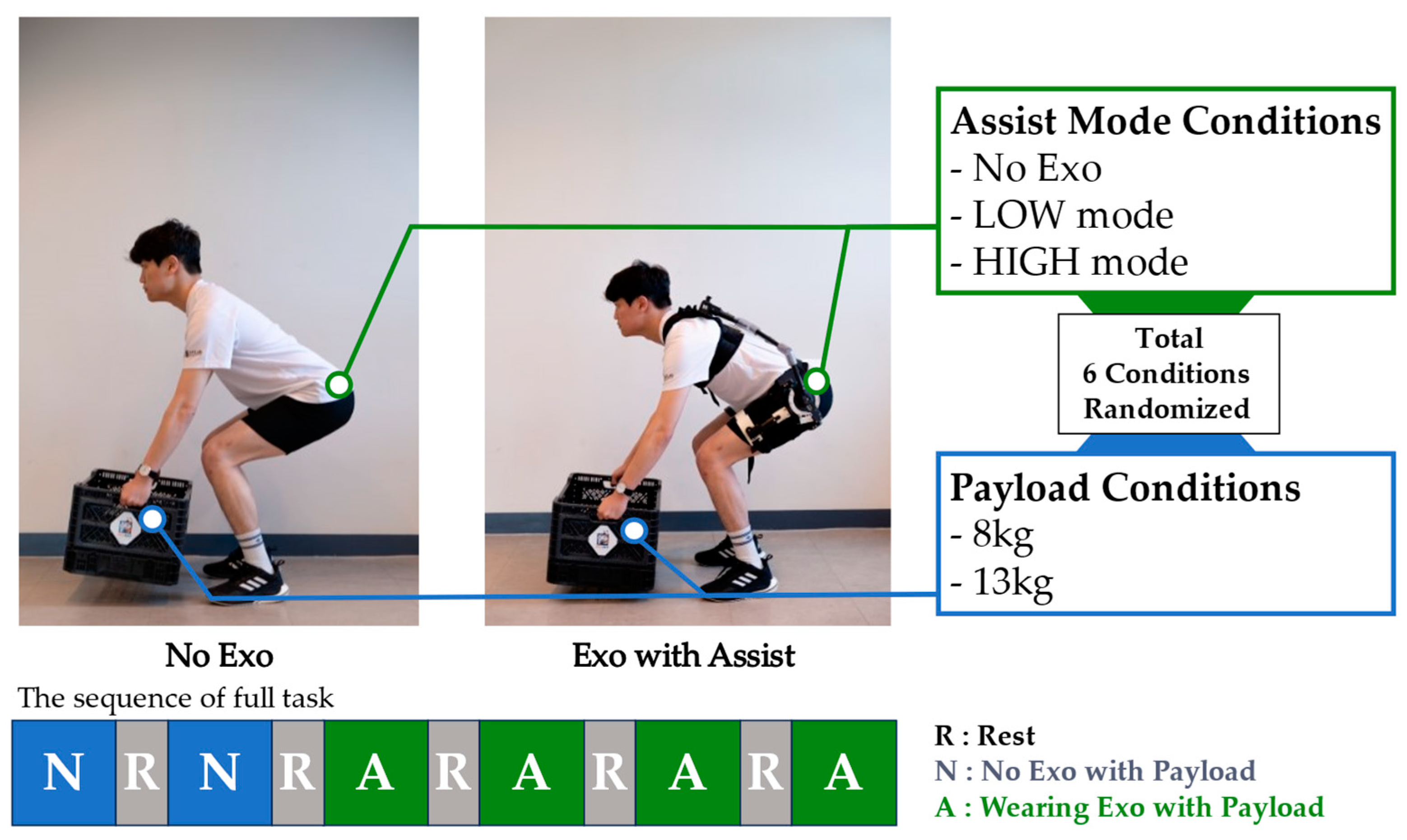
However, to effectively reduce the risk of lower back injury, the exoskeleton must be able to provide variable magnitude of assistive torque to the human body. This variability is essential because the moment applied to the human body during payload handling varies [
17,
18]. Moreover, the working environment can influence the moment applied to the human body. Actual industrial sites represent complex working environments, where various tasks are discontinuously performed. For example, various weight payloads may be handled in a random order. Therefore, a back-support exoskeleton that can swiftly and easily adjust the assistive torque must be developed. Traditional active-type exoskeletons can freely adjust the magnitude of assistive torque. However, their significant energy consumption limits prolonged usage [
19]. In contrast, passive-type exoskeletons do not have operating time limitations, as they do not require energy. However, the adjustment of assistive torque is difficult. The previously reported passive-type exoskeletons need to adjust the pre-deformation of elastic components either manually [
15] or using another version of robots [
20,
21]. Because of these limitations, it is challenging to adjust the magnitude of assistive torque quickly during operation.
To address these problems, the concept of quasi-passive exoskeletons with variable assistive torque and low energy consumption has been suggested. These quasi-passive exoskeletons use a passive element as the source of the assistive force. Moreover, they have the function of being able to adjust the characteristics of the assistive force, such as magnitude, by using a small actuator [
19,
22,
23]. This characteristic allows quasi-passive exoskeletons to operate with low energy consumption while taking advantage of the long operating time of passive exoskeletons and the easy variability of the assistive force magnitude of active exoskeletons. A representative example of a quasi-passive exoskeleton is MRLift, which uses an MR (Magnetorheological) fluid and a coil spring to adjust braking force by applying current to the MR fluid [
24,
25]. Another quasi-passive exoskeleton prototype can distinguish between squat, stoop, and left or right stoop motions by recognizing user intent, thereby determining the engagement timing of assistive torque [
23]. This prototype can also adjust the magnitude of assistive torque for each leg by modifying precompression of the coil spring, which is the source of assistive torque, enabling independent control of the torque of both legs. These quasi-passive exoskeletons successfully verified the effect of those functions. However, MRLift continuously consumes energy to maintain the adjusted braking force, potentially limiting its operating time in industrial workplaces. The other reported prototype presents limitations related to the range-of-motion with variation in the assistive torque, and also there’s another limitation which the precompression of the coil spring must be manually adjusted. Because the prototype uses the precompression of the coil spring to able variable assist function, range-of-motion limitation occurs. Also the precompression of the spring must be manually adjusted, which can be an obstacle to use in industrial sites.
To mitigate the limitations of existing quasi-passive exoskeletons and provide proper adjustable assistive torque to the human body, we developed a quasi-passive exoskeleton named the AD exo-Back Support (AeBS). By using the compact variable gravity compensation (CVGC-II) mechanism [
26], AeBS can provide assistive torque of various magnitudes to the human body without restricting the range-of-motion. The lever mechanism of CVGC-II eliminates the need for precompression of passive elements, thereby ensuring that the range-of-motion is not limited. Additionally, the use of a fully passive mechanism eliminates the need for continuous energy to maintain the adjusted assistive torque. Furthermore, the hip joint structure which is inspired by the human hip joint axis configuration ensures free body motion and secure connection between the robot and the human body. Consequently, AeBS can adjust assistive torque without limiting human motion variability while operating for extended periods.
The remaining paper is structured as follows.
Section 2 introduces the hardware design concept of the novel quasi-passive exoskeleton, AeBS.
Section 3 describes the hardware evaluation of AeBS to validate the variable assist function.
Section 4 presents the evaluation results.
Section 5 presents the concluding remarks.
2. Development of Quasi-Passive Back-Support Exoskeleton: AeBS
2.1. General Configuration and Specification of Robot
In the development of a back-support exoskeleton, two key aspects must be considered to provide appropriate assistive torque in complex working environments. First, the assistive torque must be appropriately varied to adapt to various moments exerted on the human body. Second, the exoskeleton must ensure unrestricted motion of the human body during manual material handling tasks in complex working environments.
The novel quasi-passive back-support exoskeleton AeBS was developed under these considerations.
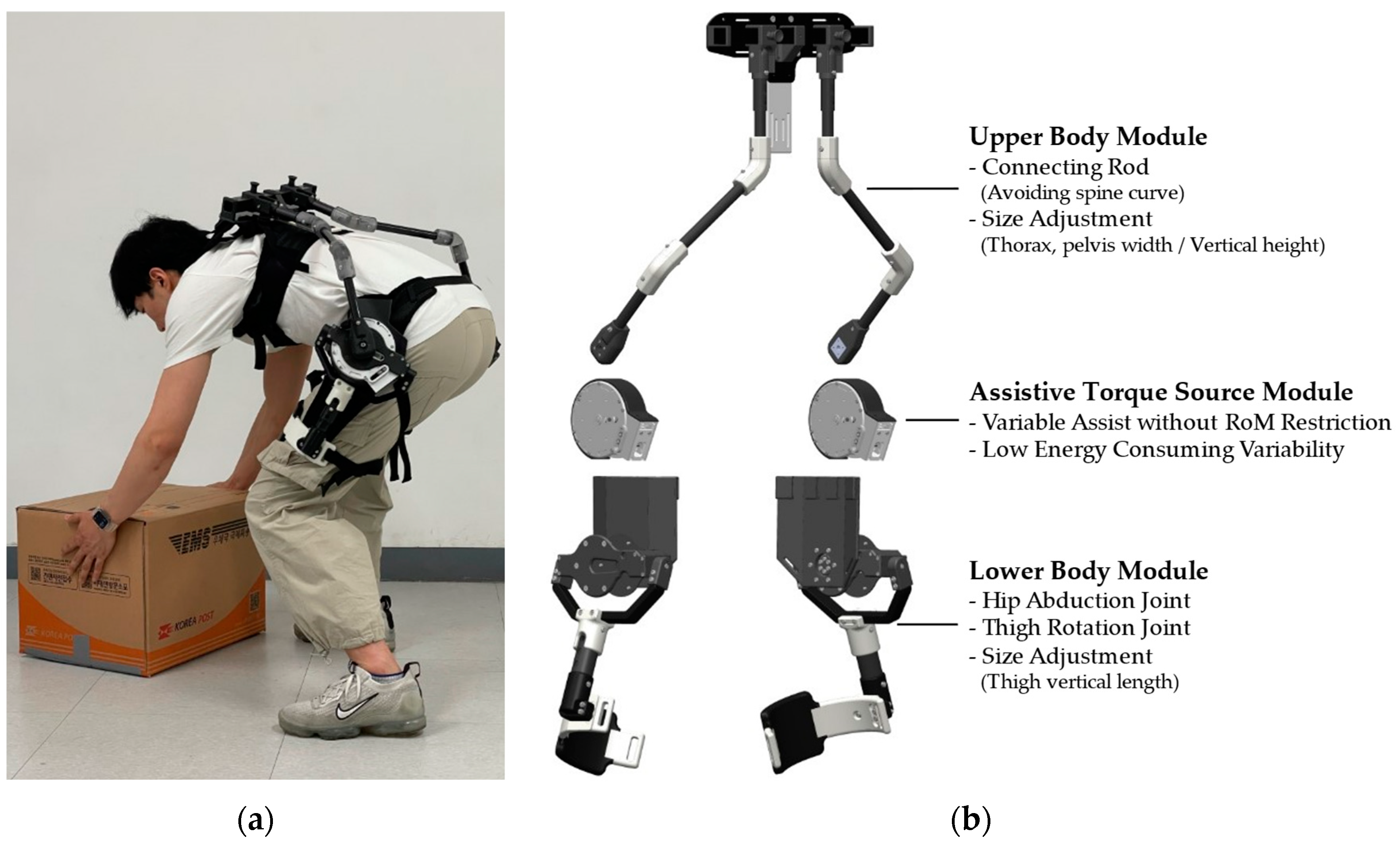
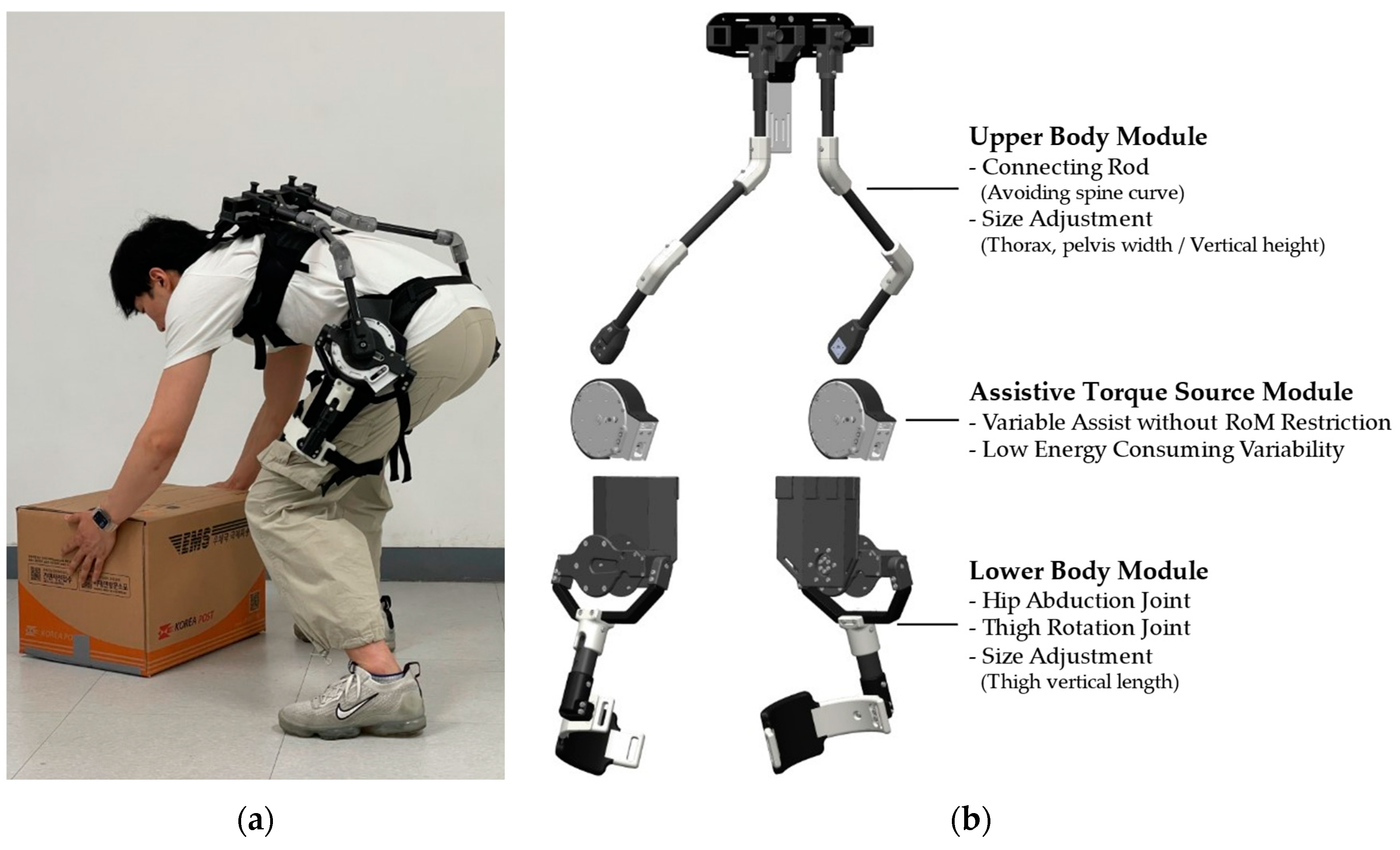
Figure 1a shows the overall appearance of AeBS. As shown in
Figure 1b, AeBS consists of three operating modules: the upper body module, lower body module, and assistive torque source module. The upper and lower body modules serve as fixed connection points between the human body and exoskeleton while transmitting assistive torque. Additionally, these modules also have elements to ensure the free motion of the human body, such as collision-avoiding connecting rods, hip abduction joints, and thigh cuff rotation. These functions make effective assistive torque transfer to the human body by allowing free motion of the human body. The assistive torque source module is the modified CVGC-II, which is a modified version of CVGC-II [
26] tailored for hip joint assistance. The variable gravity compensation mechanism of the CVGC-II system can change the magnitude of the assistive torque by adjusting the leverage ratio through moving the pivot location. Additionally, because this assistive torque adjustment is unrelated to the precompression of the spring system, there are no restrictions on the range of motion that the CVGC-II assist system can provide. Accordingly, each characteristic of the variable gravity compensation mechanism is suitable for realizing variable assistive torque and unrestricted motion of the human body using a back-support exoskeleton. The modified CVGC-II provides assistive torque to the hip joint, contributing to variable assistive torque function and free motion-ensuring function.
AeBS has a total weight of approximately 5 kg, with the modified CVGC-II systems accounting for 2.36 kg. The structures of the upper and lower body modules are constructed using 3D-printed parts, carbon plates, and carbon pipes to reduce weight and simplify the overall structure. The comparison of the weight of the robots is shown in
Table 1.
2.2. Generation of Assistive Torque
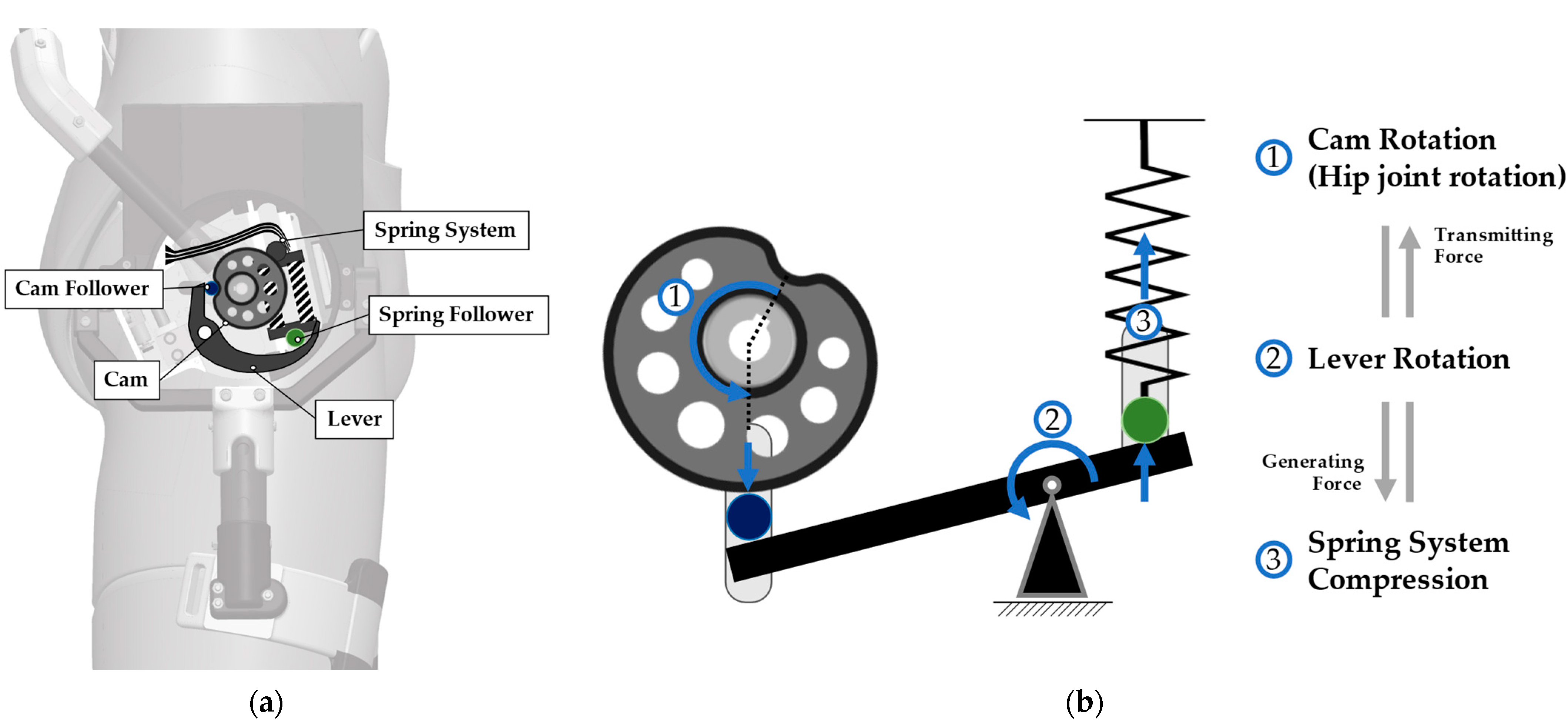
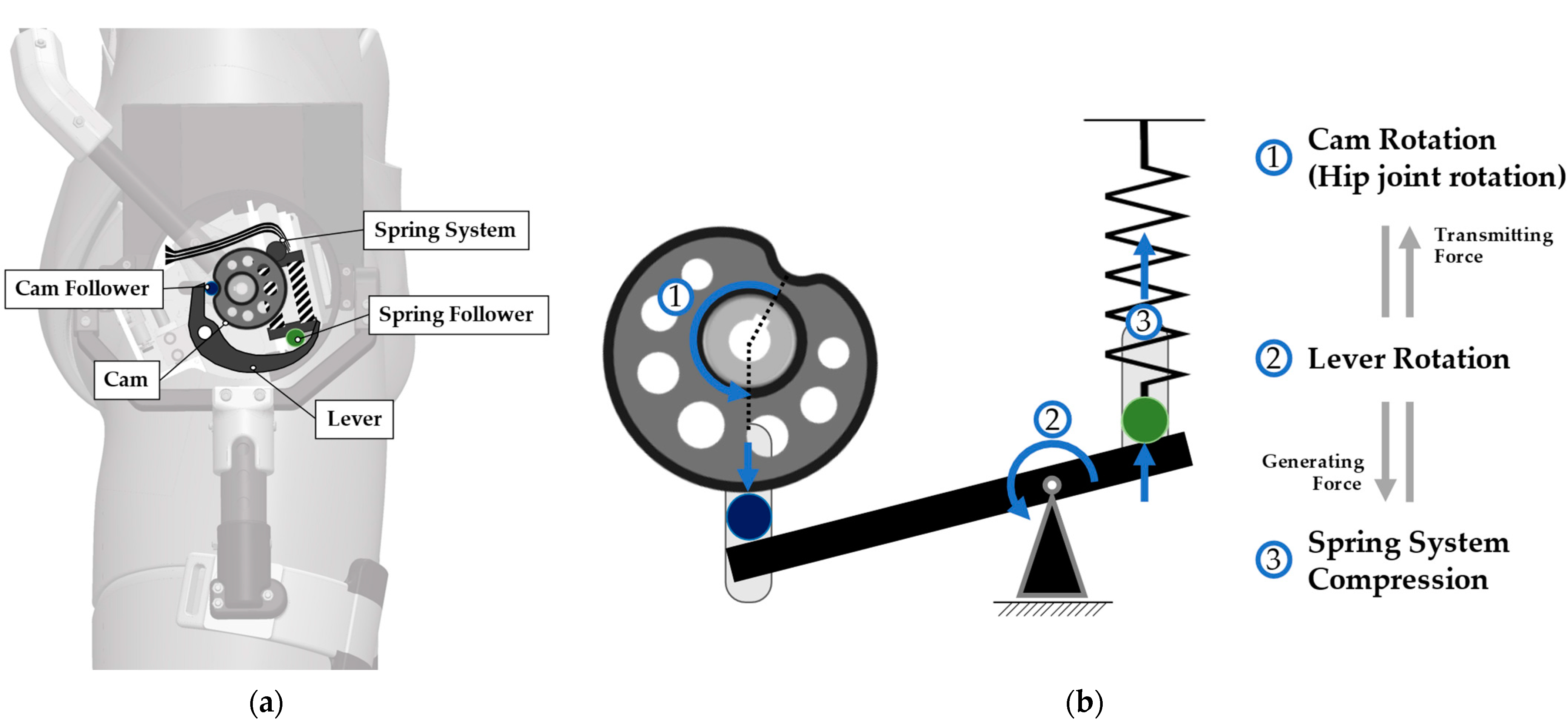
The CVGC-II device is designed to generate assistive torque. By aligning the torque output joint with the hip joint, assistive torque can be provided to the hip joint, which is one of the major working joints during manual material lifting/lowering. As shown in
Figure 2a, the torque output axis is connected to the upper body module, and the main frame of CVGC-II system is connected to the lower body module. Therefore, the CVGC-II system can rotate along with the hip joint rotation.
The components of the CVGC-II system are shown in
Figure 2a. CVGC-II system majorly consists of a cam, lever, and spring system [
27], and each component interacts through the cam follower and spring follower.
Figure 2b illustrates the geometric relationship and relative movement between each component. The torque output axis, connected to the upper body module, is connected to the cam. Thus, the movement of upper body is converted to cam rotation. When the cam rotates, the lever which is contacted to the cam also rotates. The lever movement results in the displacement of the spring system. The reaction force induced by the spring displacement generates a normal force on the cam surface. Because the contact angle at the cam surface is not zero, the surface normal force generates an assistive torque along the cam axis.
To enhance the effectiveness of hip joint assistance using the CVGC-II system, we replaced the coil springs of the CVGC-II system to increase the maximum assistive torque. The original CVGC-II system was designed for 180° rotation. However, AeBS requires only a limited range-of-motion of the hip joint during material lifting/lowering tasks. The squat, a common material lifting/lowering movement, typically involves a maximum hip flexion range of approximately 120° [
28,
29]. Thus, we modified the coil spring (SWL16-40, MISUMI, Tokyo, Japan) to ensure that the maximum compression displacement of the spring occurs at 135°.
2.3. Variability of Assistive Torque without Range-of-Motion Restriction
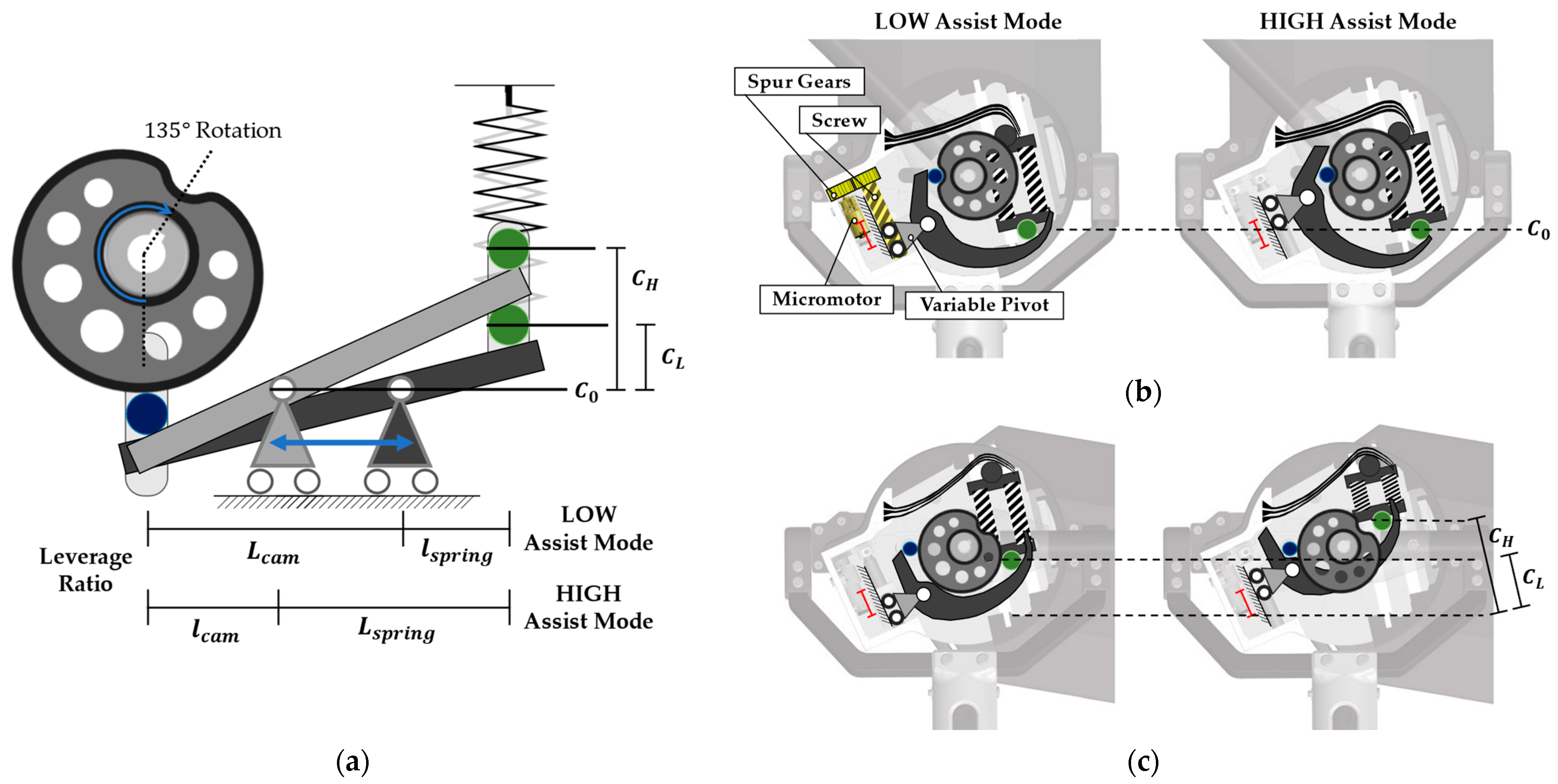
Adjustable assistance is a key function of back-support exoskeletons. AeBS can adjust the magnitude of assistive torque through the variable pivot mechanism of the modified CVGC-II system. The reaction force from the spring system displacement is transmitted through the lever. The normal force finally transmitted to the cam varies with the leverage ratio. This leverage ratio depends on the pivot position, which can be adjusted by the screw mechanism of the modified CVGC-II.
Figure 3a shows the change in the leverage ratio and spring system displacement between LOW and HIGH assist modes through pivot position adjustment. The leverage ratio in the LOW assist mode is determined as follows:
When increases to and decreases to through pivot position adjustment, the amplification ratio of the reaction force associated with spring displacement increases. Consequently, the normal force on the cam surface increases, leading to a corresponding increase in the output assistive torque.
Furthermore, a change in the pivot position drives a change in spring system displacement. When the pivot position changes, a different amount of displacement occurs on the spring system despite the same cam profile and rotation angle. When increases to and decreases to , the travel distance of the spring follower increases from to , starting from the initial position . Thus, the maximum displacement of the spring system increases. This increased spring system displacement leads to a larger normal force on the cam surface, and the output assistive torque increases in accordance.
As shown in
Figure 3b, even when the pivot position changes, there is no precompression of the spring system due to the design of the shape of the lever. Additionally, the modified CVGC-II system can use the complete 135° rotation range, even when the maximum spring system displacement changes. In other words, even with variability in assistive torque, AeBS does not impose any range-of-motion restriction on the hip joint.
The position of the pivot in the system can be automatically adjusted. As shown in
Figure 3b, a screw mechanism was used to make the linear movement of the pivot position. A micromotor is used to automatically rotate the pivot screw axis. Thus, the wearer can easily change the magnitude of assistive torque using the switches that control the position of the pivot by rotating the micromotor. During the pivot adjustment process, the energy consumption of the robot is low because the power consumption of the micromotor is only 1 W. The micromotor only operates and consumes energy when adjusting the assistive torque. This is possible because of the self-locking characteristic of the transfer screw that changes the pivot location of the lever, eliminating the need for continuous energy consumption to maintain the adjusted value of the assistive torque. Furthermore, due to its high speed, this assistive torque adjustment system using a micromotor is suitable for active change of assistive strategies in complex working environments. Specifically, the max–min torque modes can be changed within 0.9 s.
2.4. Robot Structure for Allowing Free Body Motion
The ability of a robot to effectively follow the body movement is also a key function to ensure free motion.
Figure 4a shows the functions that allow AeBS to facilitate various human movements without interference. Because AeBS uses a thigh cuff and an upper back plate as a support to provide assistive torque, the interface between the human body and the robot must securely attach without hindering human body movement. Additionally, because AeBS is basically an exoskeleton, its structure should not collide with a human body segment or hinder its motion.
A hip abduction joint can be a way to ensure free motion. Hip abduction is critical for exoskeletons. Hip abduction motion is essential for making a stable posture by adjusting the step width according to the payload size and shape and workplace environment during material lifting/lowering. This motion is essential not only for manual lifting/lowering, but also for stable normal working. Thus, a hip abduction joint was added in AeBS, allowing it to follow human hip abduction motion. At this time, free motion can be ensured only when the hip abduction movement and hip flexion movement work organically without interfering with each other. Therefore, we designed the hip abduction rotation axis to intersect the hip flexion axis, just as the human hip joint is a ball joint, and these two axes intersect. The mechanism of the hip abduction joint is shown in
Figure 4b.
Similarly, a thigh rotation joint also can be a way to ensure free motion. The thigh cuff of the robot should be attached securely and comfortably to the leg because it acts as a support fixture when delivering assistive torque to the hip joint. To make secure and comfortable attachment, it must be able to flexibly adapt to various thigh thickness and tapered lines that change accordingly. Thus, we added a thigh rotation joint to ensure that the thigh cuff could rotate to adapt to the tapered line of the thigh and thus be in close contact with the thigh. The working mechanism and range-of-motion of the thigh rotation joint are illustrated in
Figure 4b.
The connecting rod that avoids collision with the spine is essential for free motion. The spine curve that occurs during material lifting movements such as squatting and stooping is one of the reasons that makes it difficult to design the connecting rod between the thigh and upper back-support points of the exoskeleton. If the spine curvature is not considered when designing the structure of the exoskeleton, a collision could occur between the exoskeleton and the human body, which could restrict movement or cause an injury. However, a complex mechanism is required to design a structure that can fully follow the spine curve motion, which can increase the system complexity and increase the robot weight. Thus, we designed a connecting rod that can avoid the spinal curve. Considering the position of each vertebra during a stoop posture, a widely used lifting technique characterized by significant spine curve, a connecting rod was designed to three-dimensionally avoid positions with large lumbar bending. This design enabled the connection of the upper and lower body modules without additional structures. The connecting rod used carbon pipes to maintain a low weight and transmit assistive torque with minimum loss, and 3D-printed parts were used for the pipe coupler at the rod-bending section. The shape of the connecting rod, designed to avoid collisions with the human body, is shown in
Figure 4c.
The left/right independent controllability of assistive torque can also be a way to free motion. The assistive torque required in the left/right body segment may differ across various human postures during tasks in complex working environments. Providing improper assistive torque to the left/right body may limit and hinder the intent of the wearer. Thus, we used two modified CVGC-II systems in AeBS, placed on the left and right sides of the pelvis, enabling independent control of the assistive torque provided to the left/right hip joint. The overall composition, function, and movement of the robot covered in
Section 2 can be found in
Video S1.
4. Discussion
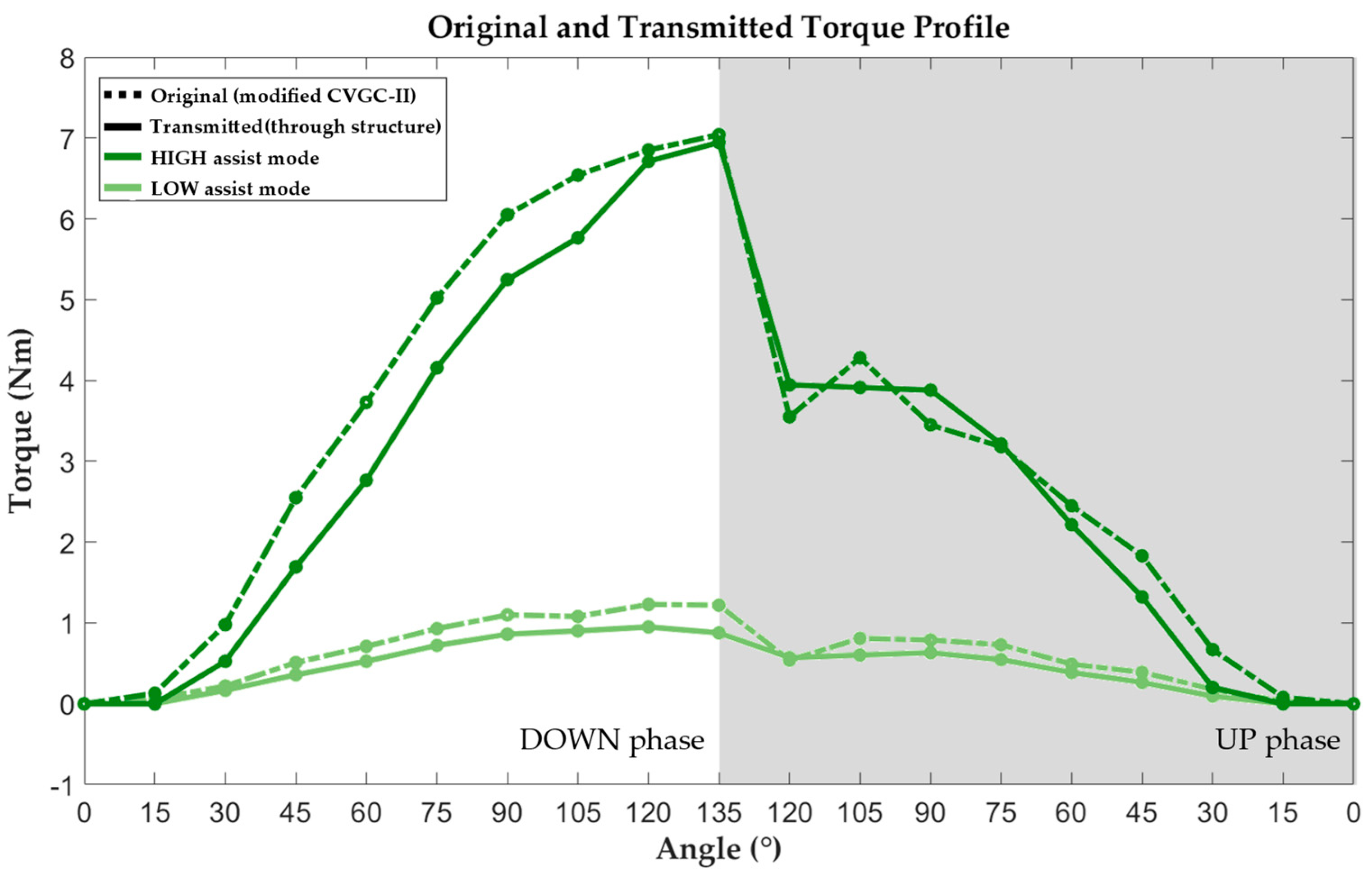
Ideally, the magnitude of the assistive torque of the modified CVGC-II should be identical in the UP and DOWN phases at each interval angle during torque profile measurement. However, hysteresis was observed in the UP phase. In this case, the reason for the hysteresis was the increased friction between internal parts such as the spring follower and lever, because of the increased spring constant relative to that of the CVGC-II. Nevertheless, the modified CVGC-II successfully increased the maximum value and variable range of assistive torque to provide proper back support.
The evaluation of the assistive torque transmission performance of the robot structure confirmed that the assistive torque was properly transmitted to the human body in the DOWN phase. However, a magnitude difference was observed between the original torque of the modified CVGC-II and transmitted torque through the robot structure. Identifying the exact cause of this difference requires further analysis, but we assume that the reason for the difference could be an elastic deformation of the structure. The carbon pipes and 3D-printed parts, such as ABS, can be easily deformed elastically. The output torque of the modified CVGC-II led to not only the compression of the thigh cuff but also the deformation of elastic components. In the UP phase, the magnitude of the assistive torque was lower than that in the DOWN phase because of the hysteresis of the assistive torque source device. Despite these differences caused by elastic deformation, the experiment successfully evaluated the variable assistive torque transmitting performance of the structure of AeBS.
The hysteresis of modified CVGC-II that occurred in UP phase is the limitation of the current study. The hysteresis makes it impossible to provide stable and even assistive torque throughout the lifting and lowering phase. This means that the wearer cannot be provided full assistive torque while lifting material up. As a result, the hysteresis may reduce the effectiveness of the robot in preventing low back injuries. Thus, the hysteresis problem should be resolved by reducing the internal friction in further research.
In the usability evaluation, the responses for Q1, Q2, and Q7 were lower than those for Q3 to Q6. We assume that the reason for the response could be the increased effective mass of both legs. Because the main frame of the CVGC-II module was connected to the leg to use the relative rotation between the upper body and leg, the effective mass and moment of inertia of the thigh potentially increased. The increased effective mass and moment of inertia likely affected the perceived weight while wearing the robot and moving the legs.
The energy efficiency of the AeBS was relatively high compared to previously developed quasi-passive exoskeletons. Moreover, the energy consumption of 1 W used to adjust the magnitude of assistive torque was less than the energy consumption of MRLift [
25], which is 5 W. Additionally, the AeBS improved user comfort. Through the spine collision-avoiding connecting rod, the AeBS corresponded to spine motion, whereas MRLift has no structure for spine curvature. Through thigh cuff rotation, the AeBS ensured secure contact of the thigh cuff, which is not the case with MRLift and another quasi-passive exoskeleton prototype [
23].
Overall, this study was aimed at developing a quasi-passive back-support exoskeleton capable of adjusting the magnitude of assistive torque without range-of-motion restriction while consuming low energy. The performance of the variable assist was evaluated using test benches. The evaluation confirmed that variable assistance could be effectively achieved throughout the assistive torque source device and transmitted through the robot structure. However, it also confirmed that the hysteresis of the assistive torque source device occurred and affected the assist performance of the robot. Nevertheless, AeBS can mitigate the limitations of the existing quasi-passive back-support exoskeletons by using a lever mechanism with a variable pivot and screw mechanism. Therefore, addressing the hysteresis problem of modified CVGC-II can further enhance the variable assist performance regardless of the lifting phase condition.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}