

Analysis of Cushioned Landing Strategies of Cats Based on Posture Estimation
 and
and 
Abstract

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. Cat Posture Estimation
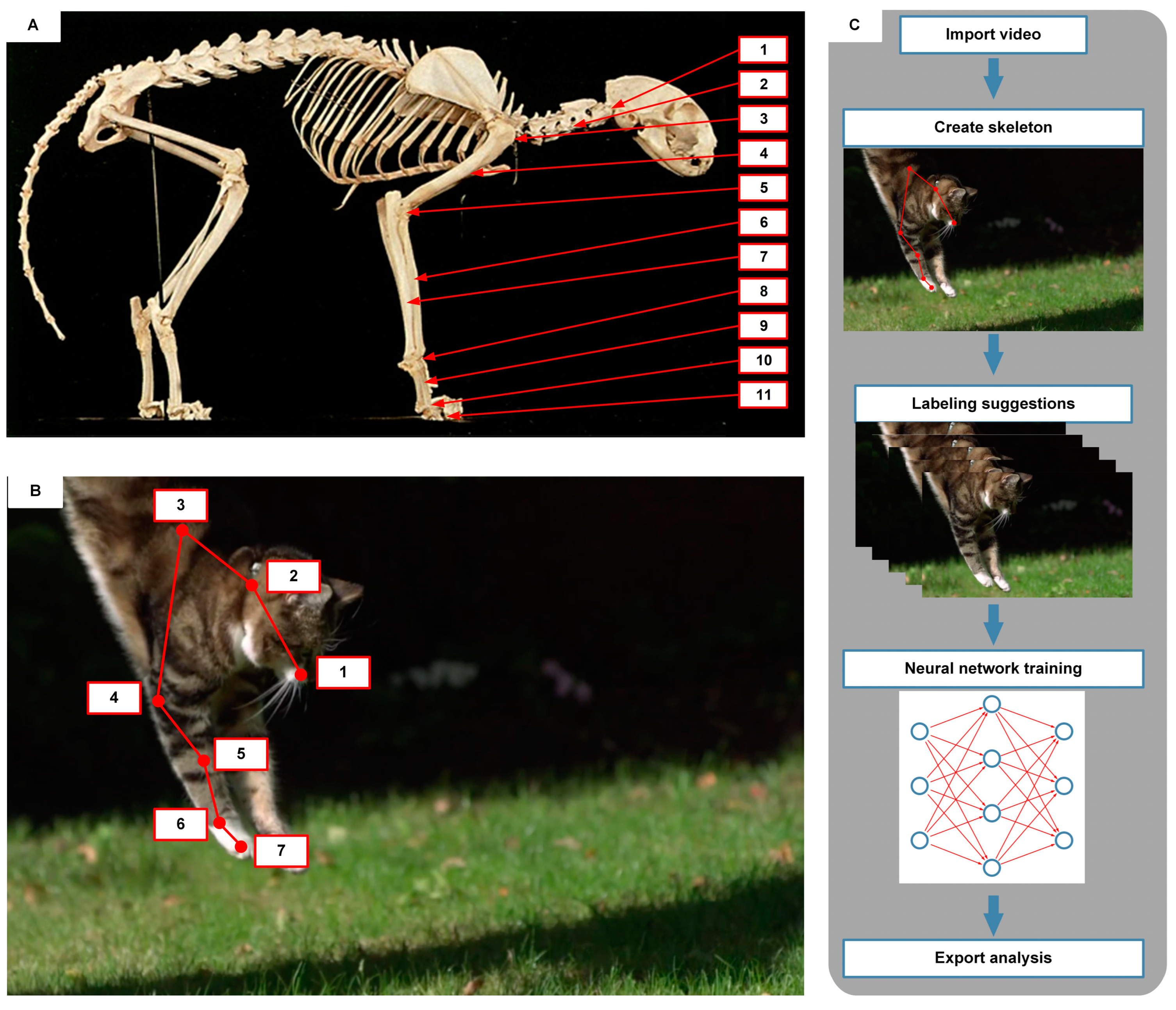
2.1.1. Kinematic Chain of Cat Skeleton
2.1.2. Toolkit of Posture Estimate
2.1.3. Labeling Process
2.1.4. Data Process
2.2. Robot Simulation
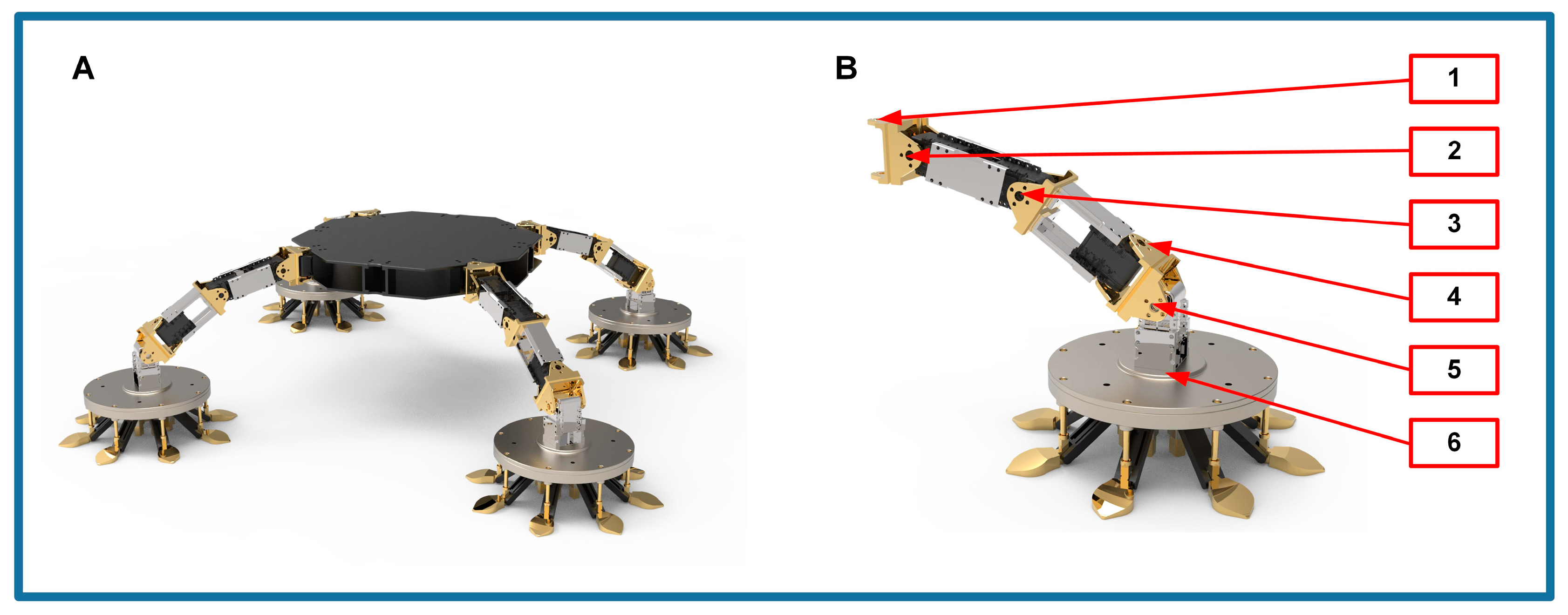
2.2.1. Robotic Simulation Platform
2.2.2. Simulator Selection
2.2.3. Simulation Process
3. Results
3.1. Analysis of Kinematic Characteristics
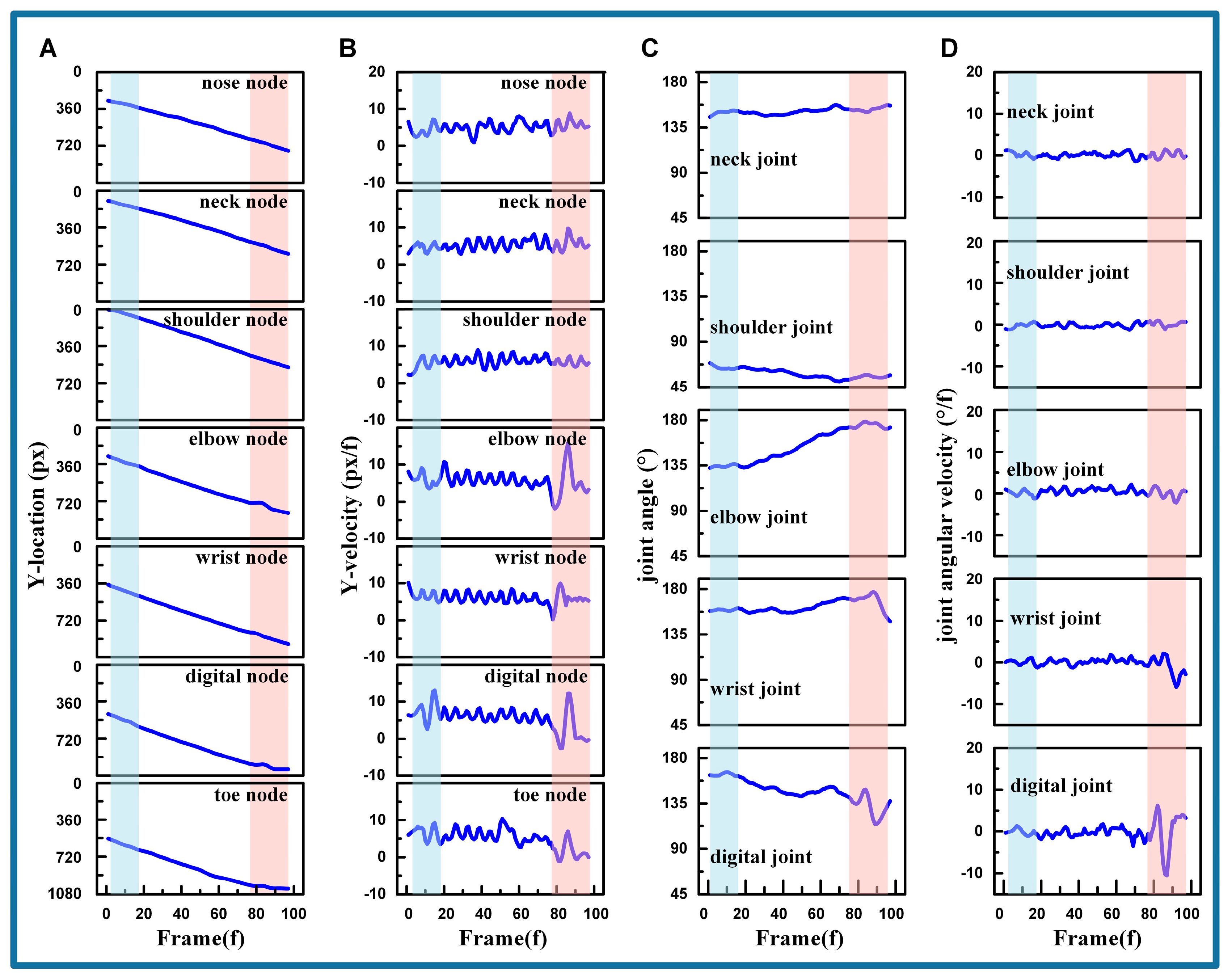
3.1.1. Airborne Phase
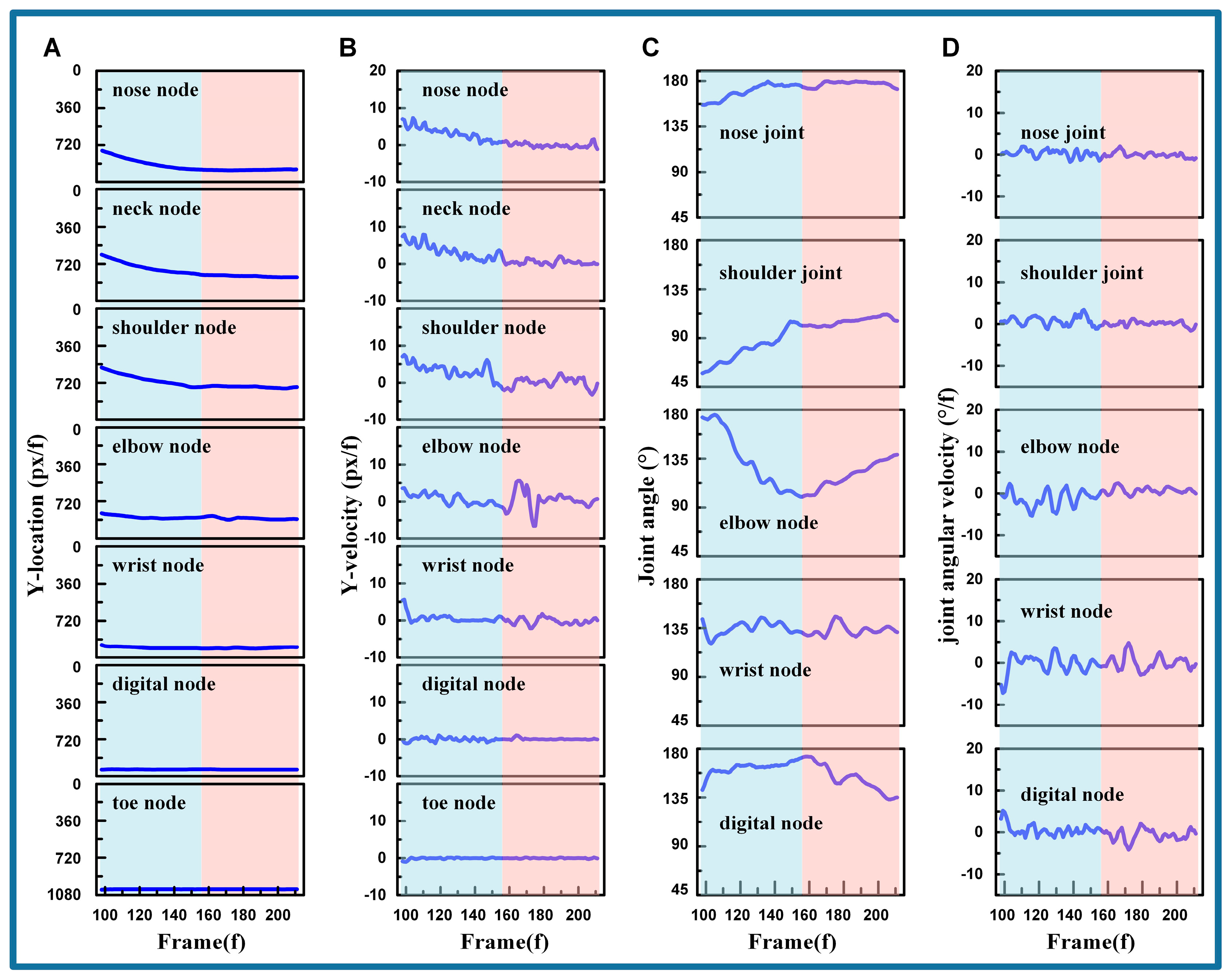
3.1.2. Cushioning Phase
3.2. Cat Landing Strategy
- The vertical velocities of each node approach zero once the front legs have completed the entire cushioning process. This indicates that the cat uses its front legs to absorb most of the landing impact during landing.
- In the airborne phase, the cat fully extends its leg to maximize the capacity of the joint cushioning in preparation for landing. The digital joint and the wrist joint are more active, with their angles continually adjusting to fine-tune the forelimb’s posture. The wrist joint and the digital joint are utilized to modify the paw’s contact angle for landing.
- In the cushioning phase, the impact absorption and orientational shift are separate actions. The impact is absorbed first, followed by reorientation. The shoulder and elbow joints play a significant role in this phase.
- Throughout the entire process, there is a logical hierarchy for the joint operation. As the cat needs to fine-tune the posture, the wrist joint and the digital are involved. Meanwhile, the shoulder joint and the elbow joint are primarily used to handle major posture adjustments like impact absorption.
- The neck joint maintains stability, and varies slightly during the landing process as other joints absorb most of the impact to protect the head.
3.3. Simulation of Cushioning Strategy on Robot Platform
3.3.1. Transferring the Strategy onto the Robot Platform
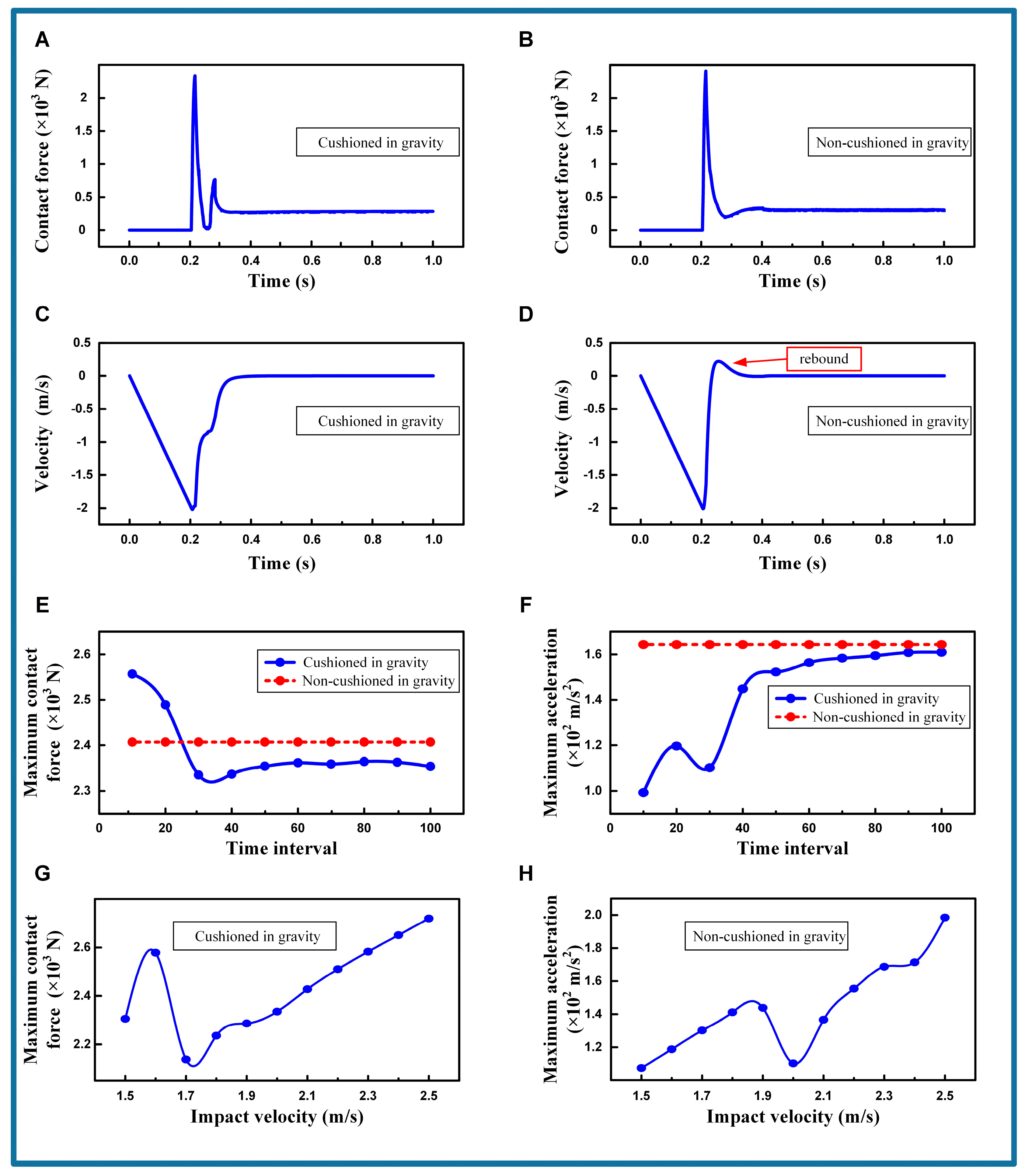
3.3.2. Simulating the Cushioning Strategy in Gravity
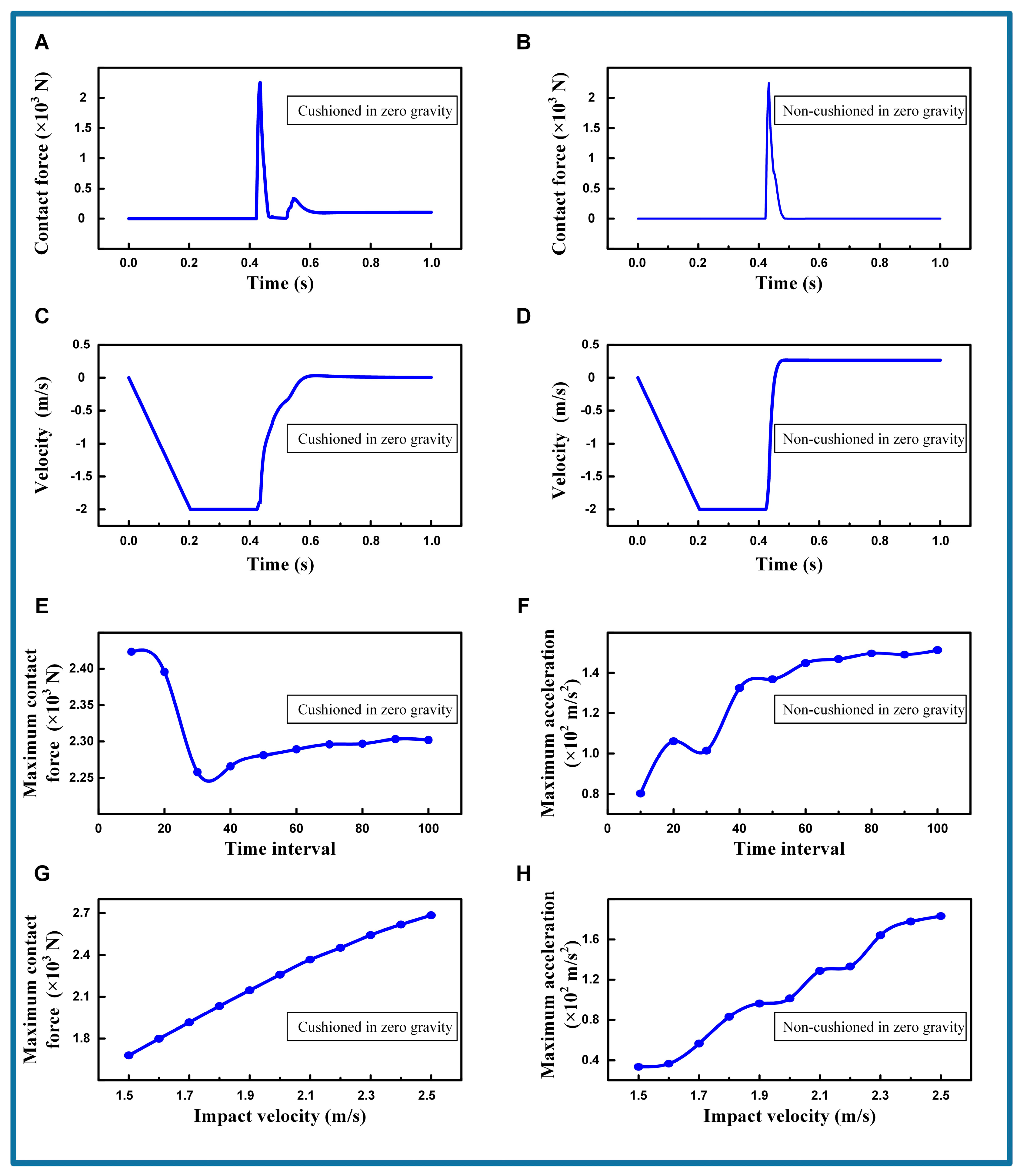
3.3.3. Simulating the Cushioning Strategy in Zero Gravity
4. Discussion
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, W.; Wang, S. Microgravity performance evaluation for zero gravity robot in China’s space station. IEEE Aerosp. Electron. Syst. Mag. 2022, 37, 32–42. [Google Scholar] [CrossRef]
- Flores-Abad, A.; Ma, O.; Pham, K. A review of space robotics technologies for on-orbit servicing. Prog. Aerosp. Sci. 2014, 68, 1–26. [Google Scholar] [CrossRef]
- Li, X.A.; Yang, D.; Liu, H. China’s space robotics for on-orbit servicing: The state of the art. Natl. Sci. Rev. 2023, 10, nwac129. [Google Scholar] [CrossRef]
- Ma, B.; Jiang, Z.; Liu, Y. Advances in space robots for on-orbit servicing: A comprehensive review. Adv. Intell. Syst. 2023, 5, 2200397. [Google Scholar] [CrossRef]
- Ding, X.L.; Wang, Y.C.; Wang, Y.B. A review of structures, verification, and calibration technologies of space robotic systems for on-orbit servicing. Sci. China Technol. Sci. 2021, 64, 462–480. [Google Scholar] [CrossRef]
- Shi, Y.; Hou, X.; Gao, G. Design and Simulation of On-Orbit Assembly System Based on Insect-Inspired Transportation. Biomimetics 2023, 8, 256. [Google Scholar] [CrossRef]
- Hou, X.; Zhu, M.; Sun, L. Scalable self-attaching/assembling robotic cluster (S2A2RC) system enabled by triboelectric sensors for in-orbit spacecraft application. Nano Energy 2022, 93, 106894. [Google Scholar] [CrossRef]
- Kim, D. Quadruped robots venture into the wild with open eyes. Sci. Robot. 2022, 7, eabn6798. [Google Scholar] [CrossRef] [PubMed]
- Youssef, S.M.; Soliman, M.A.; Saleh, M.A. Design and control of soft biomimetic pangasius fish robot using fin ray effect and reinforcement learning. Sci. Rep. 2022, 12, 21861. [Google Scholar] [CrossRef]
- Zufferey, R.; Tormo-Barbero, J.; Feliu-Talegón, D. How ornithopters can perch autonomously on a branch. Nat. Commun. 2022, 13, 7713. [Google Scholar] [CrossRef]
- Zhang, Q.; Jin, T.; Cai, J. Wearable triboelectric sensors enabled gait analysis and waist motion capture for IoT-based smart healthcare applications. Adv. Sci. 2022, 9, 2103694. [Google Scholar] [CrossRef] [PubMed]
- Chen, T.; Shi, Q.; Zhu, M. Triboelectric self-powered wearable flexible patch as 3D motion control interface for robotic manipulator. ACS Nano 2018, 12, 11561–11571. [Google Scholar] [CrossRef] [PubMed]
- Chen, T.; Shi, Q.; Zhu, M. Intuitive-augmented human-machine multidimensional nano-manipulation terminal using triboelectric stretchable strip sensors based on minimalist design. Nano Energy 2019, 60, 440–448. [Google Scholar] [CrossRef]
- Hou, X.; Xin, L.; Fu, Y. A self-powered biomimetic mouse whisker sensor (BMWS) aiming at terrestrial and space objects perception. Nano Energy 2023, 118, 109034. [Google Scholar] [CrossRef]
- Kalita, H.; Thangavelautham, J. Exploration of extreme environments with current and emerging robot systems. Curr. Robot. Rep. 2020, 1, 97–104. [Google Scholar] [CrossRef]
- Pavone, M.; Castillo-Rogez, J.C.; Nesnas, I.A.; Hoffman, J.A.; Strange, N.J. Spacecraft/rover hybrid for the exploration of small solar system bodies. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013; IEEE: New York, NY, USA; pp. 1–11. [Google Scholar]
- Arm, P.; Waibel, G.; Preisig, J. Scientific exploration of challenging planetary analog environments with a team of legged robots. Sci. Robot. 2023, 8, eade9548. [Google Scholar] [CrossRef]
- Hutter, M.; Gehring, C.; Bloesch, M. StarlETH: A compliant quadrupedal robot for fast, efficient, and versatile locomotion. International Conference on Climbing and Walking Robots (CLAWAR), Baltimore, ML, USA, 1–8 July 2012; World Scientific Publishing: Singapore, 2012; pp. 483–490. [Google Scholar]
- Klaassen, B.; Linnemann, R.; Spenneberg, D. Biomimetic walking robot SCORPION: Control and modeling. Robot. Auton. Syst. 2002, 41, 69–76. [Google Scholar] [CrossRef]
- Baines, R.; Patiballa, S.K.; Booth, J. Multi-environment robotic transitions through adaptive morphogenesis. Nature 2022, 610, 283–289. [Google Scholar] [CrossRef]
- Shi, Q.; Gao, J.; Wang, S. Development of a small-sized quadruped robotic rat capable of multimodal motions. IEEE Trans. Robot. 2022, 38, 3027–3043. [Google Scholar] [CrossRef]
- Li, L.; Wang, S.; Zhang, Y. Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces. Sci. Robot. 2022, 7, eabm6695. [Google Scholar] [CrossRef]
- Shi, Y.; Xu, Q.; Shi, R. Bionic Robot with Multifunctional Leg–Arm Mechanism for In-Orbit Assembly of Space Trusses. Biomimetics 2024, 9, 550. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Hou, X.; Na, Z. Bio-inspired attachment mechanism of dynastes Hercules: Vertical climbing for on-orbit assembly legged robots. J. Bionic Eng. 2024, 21, 137–148. [Google Scholar] [CrossRef]
- Rudin, N.; Kolvenbach, H.; Tsounis, V. Cat-like jumping and landing of legged robots in low gravity using deep reinforcement learning. IEEE Trans. Robot. 2021, 38, 317–328. [Google Scholar] [CrossRef]
- Qi, J.; Gao, H.; Yu, H. Integrated attitude and landing control for quadruped robots in asteroid landing mission scenarios using reinforcement learning. Acta Astronaut. 2023, 204, 599–610. [Google Scholar] [CrossRef]
- Yoshida, K.; Nakanishi, H.; Ueno, H. Dynamics, control and impedance matching for robotic capture of a non-cooperative satellite. Adv. Robot. 2004, 18, 175–198. [Google Scholar] [CrossRef]
- Zhang, C.; Zou, W.; Ma, L. Port-Hamiltonian modeling and jumping trajectory tracking control for a bio-inspired quadruped robot. Nonlinear Anal. Hybrid Syst. 2024, 53, 101496. [Google Scholar] [CrossRef]
- Wang, B.; Wang, Z.; Song, Y. A neural coordination strategy for attachment and detachment of a climbing robot inspired by gecko locomotion. Cyborg Bionic Syst. 2023, 4, 0008. [Google Scholar] [CrossRef]
- Cao, Q.; Wang, R.; Zhang, T. Hydrodynamic modeling and parameter identification of a bionic underwater vehicle: RobDact. Cyborg Bionic Syst. 2022, 2, 9806328. [Google Scholar] [CrossRef] [PubMed]
- Ding, F.; Wang, R.; Zhang, T. Real-time Trajectory Planning and Tracking Control of Bionic Underwater Robot in Dynamic Environment. Cyborg Bionic Syst. 2024, 5, 0112. [Google Scholar] [CrossRef]
- Savage, N. Bioinspired robots walk, swim, slither and fly. Nature 2022. [Google Scholar] [CrossRef]
- Parker Jones, O.; Mitchell, A.L.; Yamada, J. Oscillating latent dynamics in robot systems during walking and reaching. Sci. Rep. 2024, 14, 11434. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, J.; Yu, H. Effect of flexible back on energy absorption during landing in cats: A biomechanical investigation. J. Bionic Eng. 2014, 11, 506–516. [Google Scholar] [CrossRef]
- Debertin, D.; Wargel, A.; Mohr, M. Reliability of Xsens IMU-Based Lower Extremity Joint Angles during In-Field Running. Sensors 2024, 24, 871. [Google Scholar] [CrossRef]
- Ngali, M.Z.; An, W.C. Artificial intelligence in biomechanics pose estimation and the applications in human-related engineering. In Proceedings of the 11th International Conference on Mechanical and Manufacturing Engineering 2021 (ICME’21), Parit Raja, Malaysia, 25–26 August 2021; AIP Publishing: Melville, NY, USA, 2021; Volume 2530. [Google Scholar]
- Luo, H.; Xu, T.; Jiang, Y. Artemis: Articulated neural pets with appearance and motion synthesis. arXiv 2022, arXiv:2202.05628. [Google Scholar] [CrossRef]
- Pereira, T.D.; Tabris, N.; Matsliah, A. SLEAP: A deep learning system for multi-animal pose tracking. Nat. Methods 2022, 19, 486–495. [Google Scholar] [CrossRef] [PubMed]
- Gall GE, C.; Pereira, T.D.; Jordan, A. Fast estimation of plant growth dynamics using deep neural networks. Plant Methods 2022, 18, 21. [Google Scholar] [CrossRef]
- Lauer, J.; Zhou, M.; Ye, S. Multi-animal pose estimation, identification and tracking with DeepLabCut. Nat. Methods 2022, 19, 496–504. [Google Scholar] [CrossRef]
- Hayakawa, S.; Kataoka, K.; Yamamoto, M. DeepLabCut-based daily behavioural and posture analysis in a cricket. Biol. Open 2024, 13, bio060237. [Google Scholar] [CrossRef]
- Graving, J.M.; Chae, D.; Naik, H. DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning. Elife 2019, 8, e47994. [Google Scholar] [CrossRef]
- Bala, P.C.; Eisenreich, B.R.; Yoo SB, M. Automated markerless pose estimation in freely moving macaques with OpenMonkeyStudio. Nat. Commun. 2020, 11, 4560. [Google Scholar] [CrossRef]
- Wu, X.; Pei, B.; Pei, Y. How do cats resist landing injury: Insights into the multi-level buffering mechanism. J. Bionic Eng. 2020, 17, 600–610. [Google Scholar] [CrossRef]
- Cat Jumping in Slow. Available online: https://www.youtube.com/watch?v=-xN12kR4TLc (accessed on 10 October 2024).
- Hou, X.; Zhang, L.; Su, Y. A space crawling robotic bio-paw (SCRBP) enabled by triboelectric sensors for surface identification. Nano Energy 2023, 105, 108013. [Google Scholar] [CrossRef]
- Yin, H.; Varava, A.; Kragic, D. Modeling, learning, perception, and control methods for deformable object manipulation. Sci. Robot. 2021, 6, eabd8803. [Google Scholar] [CrossRef] [PubMed]
- Hwangbo, J.; Lee, J.; Dosovitskiy, A. Learning agile and dynamic motor skills for legged robots. Sci. Robot. 2019, 4, eaau5872. [Google Scholar] [CrossRef]
- Sleiman, J.P.; Farshidian, F.; Hutter, M. Versatile multicontact planning and control for legged loco-manipulation. Sci. Robot. 2023, 8, eadg5014. [Google Scholar] [CrossRef]
- Su, Y.; Hou, X.; Jiang, S.; Li, M.; Liu, Y.; Yang Zhan Chen, T. Adhesion properties of carbon nanotube arrays for an adhesive foot of a space crawling robot. Smart Mater. Struct. 2019, 29, 025001. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Han, L.; Liu, H.; Shi, R.; Zhang, M.; Wang, W.; Hou, X. Analysis of Cushioned Landing Strategies of Cats Based on Posture Estimation. Biomimetics 2024, 9, 691. https://doi.org/10.3390/biomimetics9110691
Zhang L, Han L, Liu H, Shi R, Zhang M, Wang W, Hou X. Analysis of Cushioned Landing Strategies of Cats Based on Posture Estimation. Biomimetics. 2024; 9(11):691. https://doi.org/10.3390/biomimetics9110691
Chicago/Turabian StyleZhang, Li, Liangliang Han, Haohang Liu, Rui Shi, Meiyang Zhang, Weijun Wang, and Xuyan Hou. 2024. "Analysis of Cushioned Landing Strategies of Cats Based on Posture Estimation" Biomimetics 9, no. 11: 691. https://doi.org/10.3390/biomimetics9110691
APA StyleZhang, L., Han, L., Liu, H., Shi, R., Zhang, M., Wang, W., & Hou, X. (2024). Analysis of Cushioned Landing Strategies of Cats Based on Posture Estimation. Biomimetics, 9(11), 691. https://doi.org/10.3390/biomimetics9110691