
“Extended Descriptive Risk-Averse Bayesian Model” a More Comprehensive Approach in Simulating Complex Biological Motion Perception


Abstract
1. Introduction
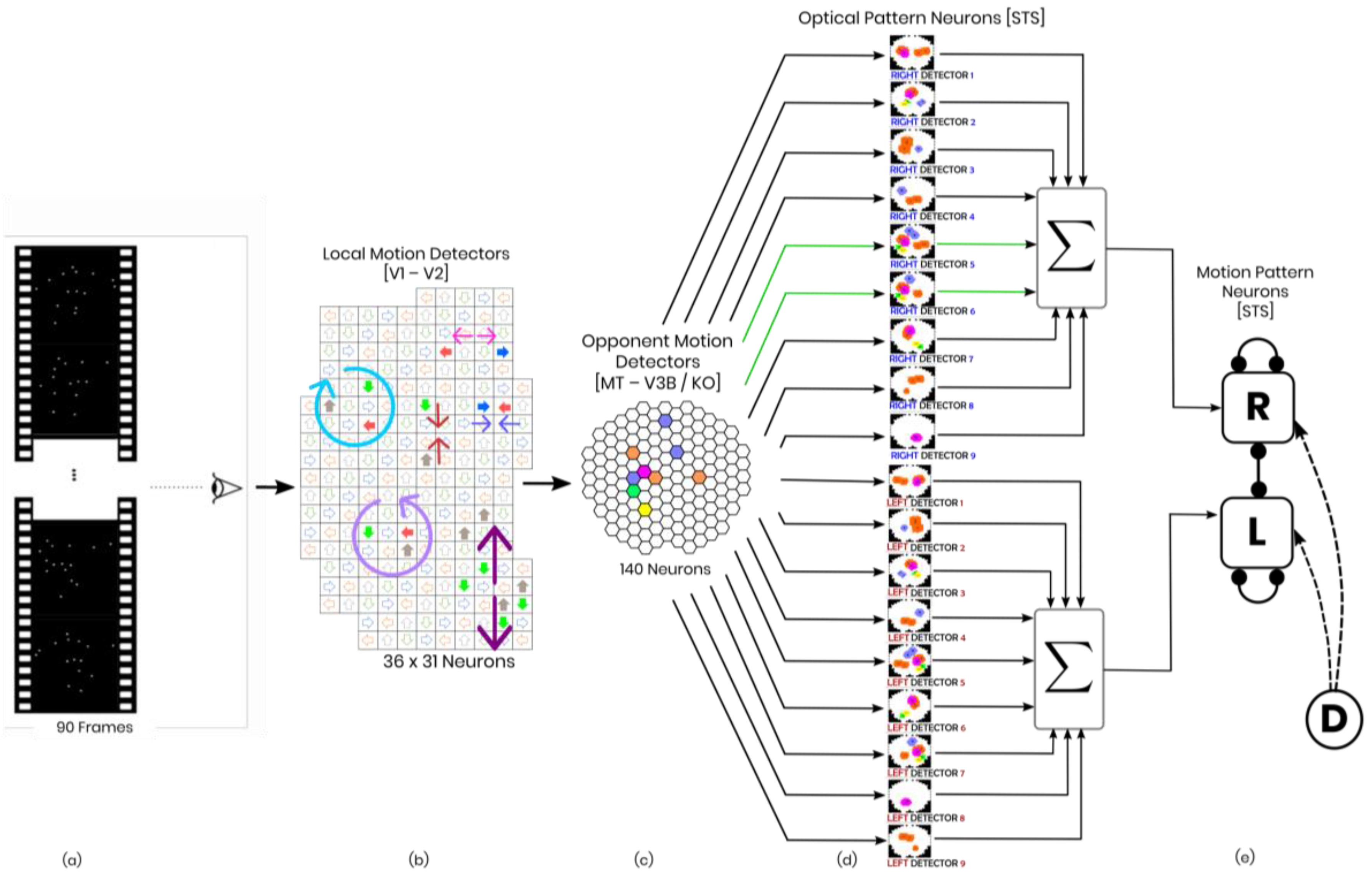
2. Model
2.1. Local Motion Energy Detectors
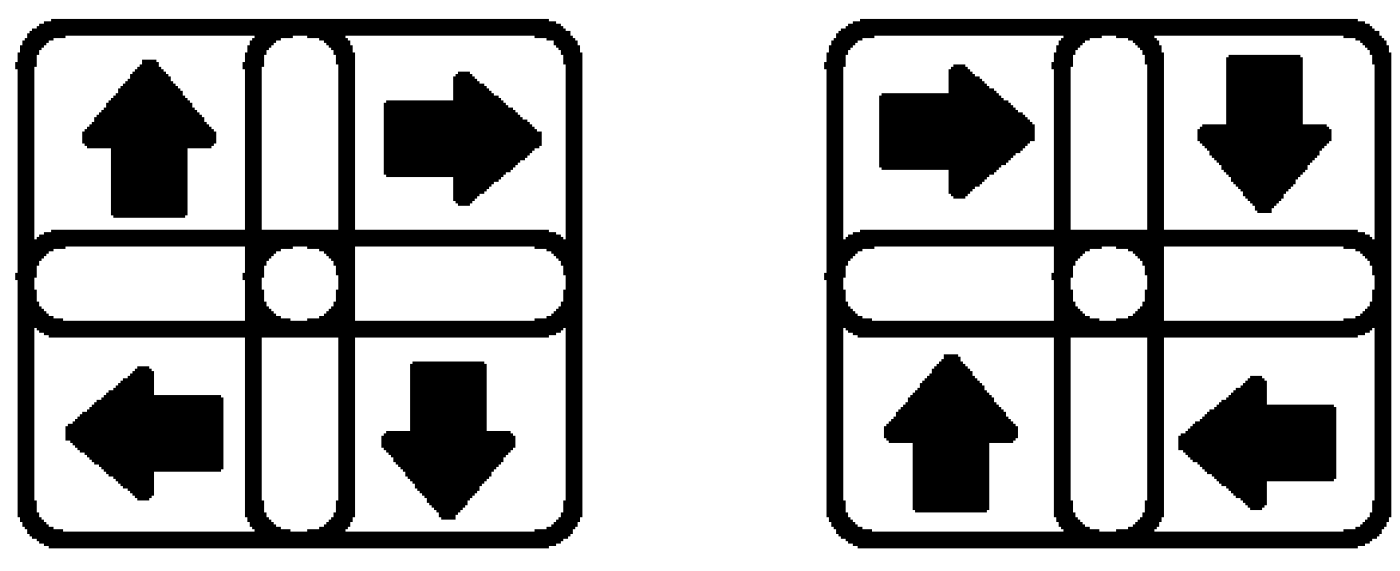
2.2. Opponent-Motion Detectors
2.3. Complex Global Optic Flow Pattern Detectors
2.4. Complete Biological Motion Pattern Detectors (Motion Pattern Detectors)
2.5. Robust Mutual Inhibition Model with Adaptation
2.6. Modeling Internal Noise
3. Methods
3.1. Local Motion Energy and Opponent Motion Neurons
3.2. Optic Flow Pattern Neurons
3.3. Motion Pattern Neurons
3.4. Operating the Simulator
- The standard deviation of the added internal noise, δ.
- The time constant, τ.
- The inhibitory feedback gain, k, and
- The time point of adaptation onset, τa.
4. Results
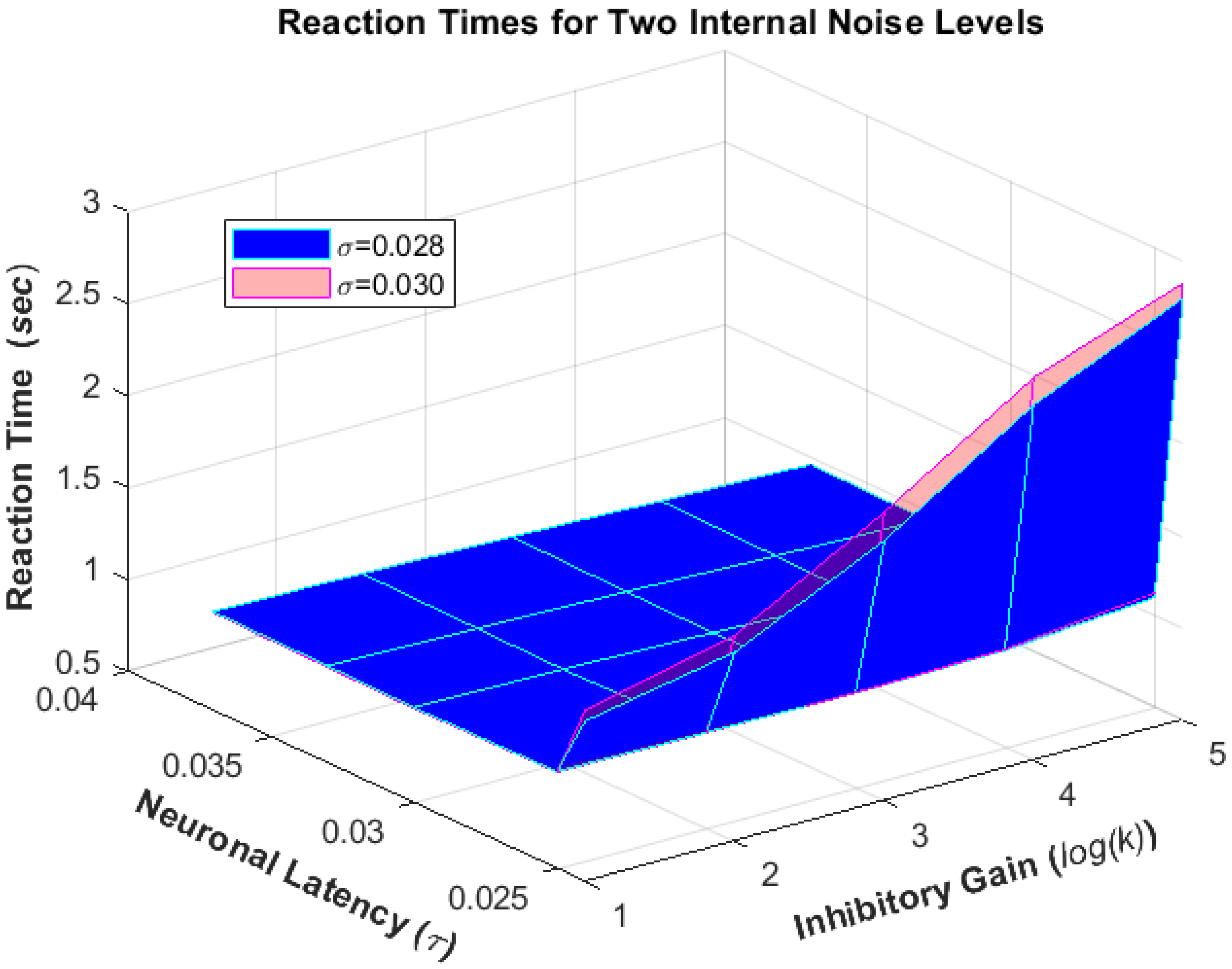
4.1. Extended Model Reaction Time Output
4.2. Integration of Rotation Detection in Opponent Motion Hierarchy Level
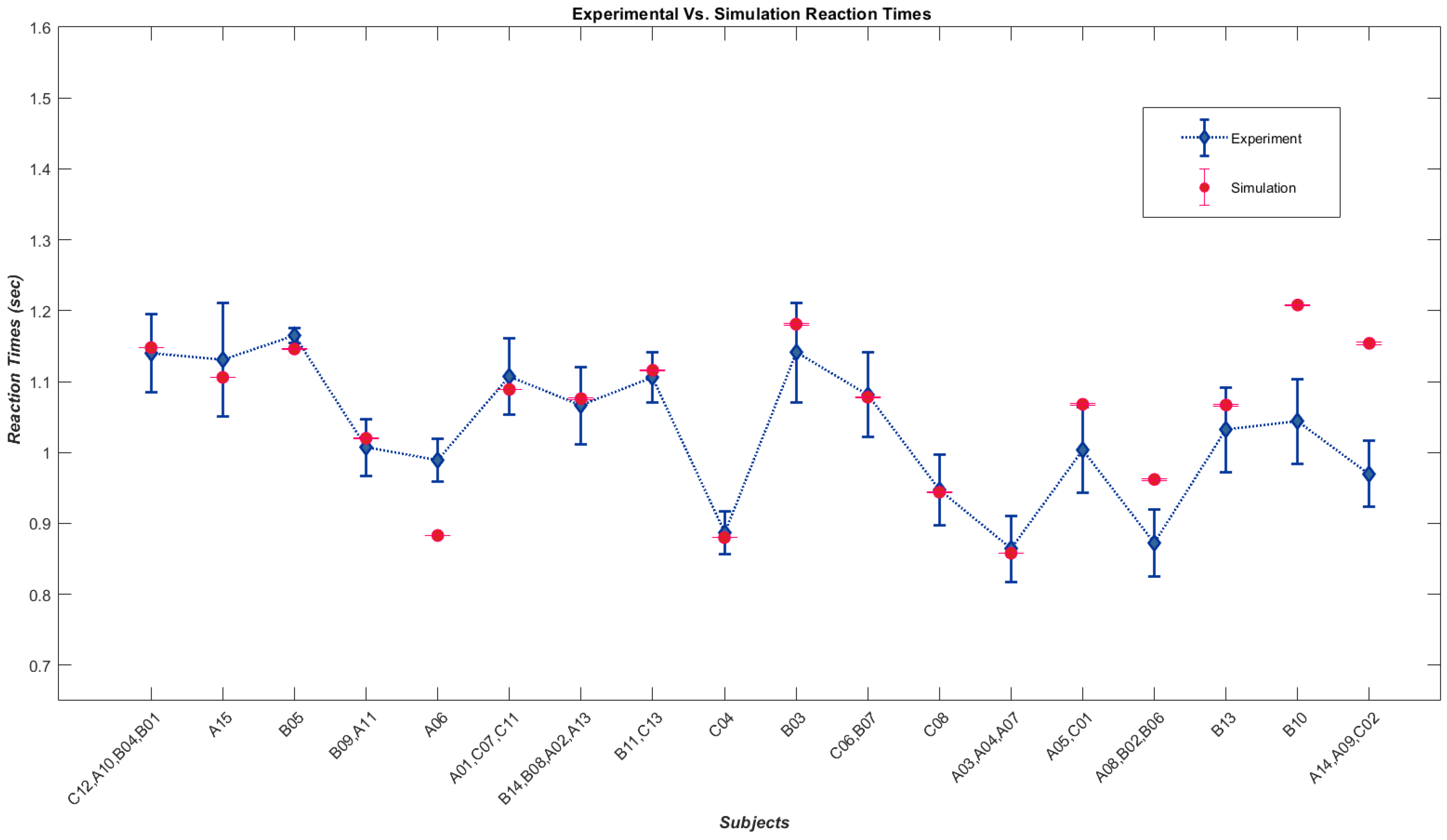
4.3. Human Results vs. Simulation Results
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Blake, R.; Shiffrar, M. Perception of human motion. Annu. Rev. Psychol. 2007, 58, 47–73. [Google Scholar] [CrossRef] [PubMed]
- Johansson, G. Visual perception of biological motion and a model for its analysis. Percept. Psychophys. 1973, 14, 201–211. [Google Scholar] [CrossRef]
- Gilaie-Dotan, S.; Saygin, A.P.; Lorenzi, L.J.; Rees, G.; Behrmann, M. Ventral aspect of the visual form pathway is not critical for the perception of biological motion. Proc. Natl. Acad. Sci. USA 2015, 112, E361–E370. [Google Scholar] [CrossRef] [PubMed]
- Giese, M.A.; Poggio, T. Neural mechanisms for the recognition of biological movements. Nat. Rev. Neurosci. 2003, 4, 179–192. [Google Scholar] [CrossRef] [PubMed]
- Saygin, A.P. Sensory and Motor Brain Areas Supporting Biological Motion Perception: Neuropsychological and Neuroimaging Studies. In People Watching: Social, Perceptual, and Neurophysiological Studies of Body Perception, online ed.; Johnson, K., Shiffrar, M., Eds.; Oxford Series in Visual Cognition; Oxford Academic: Oxford, UK, 2012; pp. 369–387. [Google Scholar] [CrossRef]
- Beintema, J.A.; Lappe, M. Perception of biological motion without local image motion. Proc. Natl. Acad. Sci. USA 2002, 99, 5661–5663. [Google Scholar] [CrossRef] [PubMed]
- Mather, G.; Radford, K.; West, S. Low-Level Visual Processing of Biological Motion. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1992, 249, 149–155. [Google Scholar] [CrossRef]
- Casile, A.; Giese, M.A. Critical features for the recognition of biological motion. J. Vis. 2005, 5, 6. [Google Scholar] [CrossRef] [PubMed]
- Bardi, L.; Regolin, L.; Simion, F. Biological motion preference in humans at birth: Role of dynamic and configural properties. Dev. Sci. 2011, 14, 353–359. [Google Scholar] [CrossRef]
- Vallortigara, G.; Regolin, L.; Marconato, F. Visually inexperienced chicks exhibit spontaneous preference for biological motion patterns. PLoS Biol. 2005, 3, e208. [Google Scholar] [CrossRef]
- Chang, D.H.; Troje, N.F. The local inversion effect in biological motion perception is acceleration-based. J. Vis. 2008, 8, 911. [Google Scholar] [CrossRef]
- Troje, N.F.; Westhoff, C. The inversion effect in biological motion perception: Evidence for a “life detector”? Curr. Biol. 2006, 16, 821–824. [Google Scholar] [CrossRef] [PubMed]
- Thurman, S.M.; Lu, H. Bayesian integration of position and orientation cues in perception of biological and non-biological forms. Front. Hum. Neurosci. 2014, 8, 91. [Google Scholar] [CrossRef]
- Grosbras, M.H.; Beaton, S.; Eickhoff, S.B. Brain regions involved in human movement perception: A quantitative voxel-based meta-analysis. Hum. Brain Mapp. 2012, 33, 431–454. [Google Scholar] [CrossRef] [PubMed]
- Kourtzi, Z.; Krekelberg, B.; Van Wezel, R.J. Linking form and motion in the primate brain. Trends Cogn. Sci. 2008, 12, 230–236. [Google Scholar] [CrossRef] [PubMed]
- Misaghian, K.; Lugo, J.E.; Faubert, J. Descriptive risk-averse Bayesian decision-making” as a model for complex biological motion perception in the human dorsal pathway. Biomimetics 2022, 7, 193. [Google Scholar] [CrossRef]
- Misaghian, K. Bayesian Modeling of Biological Motion Perception in Sport. Ph.D. Thesis, Université de Montréal, Montréal, QC, Canada, 8 July 2020. [Google Scholar]
- Romeas, T.; Faubert, J. Soccer athletes are superior to non-athletes at perceiving soccer-specific and non-sport specific human biological motion. Front. Psychol. 2015, 6, 1343. [Google Scholar] [CrossRef]
- Smith, A.T.; Snowden, R.J. Visual Detection of Motion, 1st ed.; Academic Press: San Diego, CA, USA, 1994. [Google Scholar]
- Tanaka, K.; Saito, H.A. Analysis of motion of the visual field by direction, expansion/contraction, and rotation cells clustered in the dorsal part of the medial superior temporal area of the macaque monkey. J. Neurophysiol. 1989, 62, 626–641. [Google Scholar] [CrossRef]
- Allman, J.; Miezin, F.; McGuinness, E. Direction-and velocity-specific responses from beyond the classical receptive field in the middle temporal visual area (MT). Perception 1985, 14, 105–126. [Google Scholar] [CrossRef]
- Gawne, T.J.; Martin, J.M. Responses of primate visual cortical neurons to stimuli presented by flash, saccade, blink, and external darkening. J. Neurophysiol. 2002, 88, 2178–2186. [Google Scholar] [CrossRef]
- Lampl, I.; Ferster, D.; Poggio, T.; Riesenhuber, M. Intracellular measurements of spatial integration and the MAX operation in complex cells of the cat primary visual cortex. J. Neurophysiol. 2004, 92, 2704–2713. [Google Scholar] [CrossRef]
- Riesenhuber, M.; Poggio, T. Hierarchical models of object recognition in cortex. Nat. Neurosci. 1999, 2, 1019. [Google Scholar] [CrossRef] [PubMed]
- Orban, G.A.; Dupont, P.; De Bruyn, B.; Vogels, R.; Vandenberghe, R.; Mortelmans, L. A motion area in human visual cortex. Proc. Natl. Acad. Sci. USA 1995, 92, 993–997. [Google Scholar] [CrossRef] [PubMed]
- Orban, G.A.; Lagae, L.; Verri, A.; Raiguel, S.; Xiao, D.; Maes, H.; Torre, V. First-order analysis of optical flow in monkey brain. Proc. Natl. Acad. Sci. USA 1992, 89, 2595–2599. [Google Scholar] [CrossRef] [PubMed]
- Mineiro, P.; Zipser, D. Analysis of direction selectivity arising from recurrent cortical interactions. Neural Comput. 1998, 10, 353–371. [Google Scholar] [CrossRef] [PubMed]
- Decety, J.; Grèzes, J. Neural mechanisms subserving the perception of human actions. Trends Cogn. Sci. 1999, 3, 172–178. [Google Scholar] [CrossRef] [PubMed]
- Oram, M.W.; Perrett, D.I. Responses of anterior superior temporal polysensory (STPa) neurons to “biological motion” stimuli. J. Cogn. Neurosci. 1994, 6, 99–116. [Google Scholar] [CrossRef] [PubMed]
- Perrett, D.I.; Smith, P.A.J.; Mistlin, A.J.; Chitty, A.J.; Head, A.S.; Potter, D.D.; Jeeves, M.A. Visual analysis of body movements by neurones in the temporal cortex of the macaque monkey: A preliminary report. Behav. Brain Res. 1985, 16, 153–170. [Google Scholar] [CrossRef]
- Vaina, L.M.; Solomon, J.; Chowdhury, S.; Sinha, P.; Belliveau, J.W. Functional neuroanatomy of biological motion perception in humans. Proc. Natl. Acad. Sci. USA 2001, 98, 11656–11661. [Google Scholar] [CrossRef]
- Martinez-Conde, S.; Macknik, S.L.; Hubel, D.H. The role of fixational eye movements in visual perception. Nat. Rev. Neurosci. 2004, 5, 229. [Google Scholar] [CrossRef]
- Mayo, J.P.; Smith, M.A. Neuronal Adaptation: Tired Neurons or Wired Networks? Trends Neurosci. 2017, 40, 127–128. [Google Scholar] [CrossRef]
- Theodoni, P.; Kovács, G.; Greenlee, M.W.; Deco, G. Neuronal adaptation effects in decision making. J. Neurosci. 2011, 31, 234–246. [Google Scholar] [CrossRef] [PubMed]
- Lugo, J.E.; Mejia-Romero, S.; Doti, R.; Ray, K.; Kothari, S.L.; Withers, G.S.; Faubert, J. A simple dynamic model that accounts for regulation of neuronal polarity. J. Integr. Neurosci. 2018, 17, 323–330. [Google Scholar]
- Wilson, H.R. Spikes, Decisions, and Actions: The Dynamical Foundations of Neurosciences, 1st ed.; Oxford University Press: New York, NY, USA, 1999; pp. 72–115. [Google Scholar]
- Botwinick, J.; Thompson, L.W. Premotor and motor components of reaction time. J. Exp. Psychol. 1966, 71, 9–15. [Google Scholar] [CrossRef] [PubMed]
- Hill, E.L. Executive dysfunction in autism. Trends Cogn. Sci. 2004, 8, 26–32. [Google Scholar] [CrossRef]
- Hosenbocus, S.; Chahal, R. A review of executive function deficits and pharmacological management in children and adolescents. J. Can. Acad. Child Adolesc. Psychiatry 2012, 21, 223. [Google Scholar] [PubMed]
- Rubenstein, J.; Merzenich, M.M. Model of autism: Increased ratio of excitation/inhibition in key neural systems. Genes Brain Behav. 2003, 2, 255–267. [Google Scholar] [CrossRef] [PubMed]
- Kriegeskorte, N.; Douglas, P.K. Cognitive computational neuroscience. Nat. Neurosci. 2018, 21, 1148–1160. [Google Scholar] [CrossRef] [PubMed]
- Cattaneo, L.; Rizzolatti, G. The mirror neuron system. Arch. Neurol. 2009, 66, 557–560. [Google Scholar] [CrossRef]
- Gallese, V.; Goldman, A. Mirror neurons and the simulation theory of mind-reading. Trends Cogn. Sci. 1998, 2, 493–501. [Google Scholar] [CrossRef]
- Kilner, J.M.; Friston, K.J.; Frith, C.D. Predictive coding: An account of the mirror neuron system. Cogn. Process 2007, 8, 159–166. [Google Scholar] [CrossRef]
- Grossman, E.; Donnelly, M.; Price, R.; Pickens, D.; Morgan, V.; Neighbor, G.; Blake, R. Brain areas involved in perception of biological motion. J. Cogn. Neurosci. 2000, 12, 711–720. [Google Scholar] [CrossRef] [PubMed]
- Keysers, C.; Perrett, D.I. Demystifying social cognition: A Hebbian perspective. Trends Cogn. Sci. 2004, 8, 501–507. [Google Scholar] [CrossRef] [PubMed]
- Luppino, G.; Murata, A.; Govoni, P.; Matelli, M. Largely segregated parietofrontal connections linking rostral intraparietal cortex (areas AIP and VIP) and the ventral premotor cortex (areas F5 and F4). Exp. Brain Res. 1999, 128, 181–187. [Google Scholar] [CrossRef] [PubMed]
- Paszkiel, S.; Dobrakowski, P. Brain–computer technology-based training system in the field of motor imagery. IET Sci. Meas. Technol. 2020, 14, 1014–1018. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Threshold | τ | Threshold | τ | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.024 | 0.025 | 0.03 | 0.033 | 0.037 | 0.024 | 0.025 | 0.03 | 0.033 | 0.037 | ||||
| 2 | 9.82 | 5.57 | 5.28 | 5.20 | 5.02 | 2 | 12.26 | 6.40 | 5.89 | 5.81 | 5.67 | ||
| k | 4 | 10.96 | 5.96 | 5.60 | 5.59 | 5.43 | k | 4 | 13.97 | 6.87 | 6.41 | 6.17 | 5.98 |
| 8 | 13.97 | 6.83 | 6.34 | 6.15 | 5.93 | 8 | 16.32 | 7.73 | 7.23 | 7.05 | 6.80 | ||
| 16 | 14.72 | 8.30 | 7.69 | 7.40 | 6.96 | 16 | 16.71 | 9.28 | 8.59 | 8.47 | 7.95 | ||
| 32 | 14.88 | 10.18 | 9.31 | 9.04 | 8.91 | 32 | 15.45 | 11.13 | 10.59 | 10.26 | 9.90 | ||
| Slope | τ | Slope | τ | ||||||||||
| 0.024 | 0.025 | 0.03 | 0.033 | 0.037 | 0.024 | 0.025 | 0.03 | 0.033 | 0.037 | ||||
| 2 | 0.10 | 0.23 | 0.26 | 0.28 | 0.29 | 2 | 0.08 | 0.19 | 0.22 | 0.24 | 0.24 | ||
| k | 4 | 0.10 | 0.22 | 0.26 | 0.25 | 0.28 | k | 4 | 0.08 | 0.18 | 0.21 | 0.22 | 0.24 |
| 8 | 0.08 | 0.20 | 0.22 | 0.24 | 0.27 | 8 | 0.07 | 0.16 | 0.19 | 0.20 | 0.22 | ||
| 16 | 0.09 | 0.18 | 0.20 | 0.21 | 0.24 | 16 | 0.07 | 0.15 | 0.17 | 0.17 | 0.20 | ||
| 32 | 0.10 | 0.16 | 0.18 | 0.19 | 0.19 | 32 | 0.09 | 0.14 | 0.15 | 0.16 | 0.16 | ||
| RT | τ | RT | τ | ||||||||||
| 0.024 | 0.025 | 0.03 | 0.033 | 0.037 | 0.024 | 0.025 | 0.03 | 0.033 | 0.037 | ||||
| 2 | 1.375 | 1.028 | 1.019 | 1.030 | 1.039 | 2 | 1.434 | 1.025 | 1.014 | 1.022 | 1.034 | ||
| k | 4 | 1.530 | 1.021 | 1.006 | 1.014 | 1.025 | k | 4 | 1.622 | 1.019 | 0.996 | 1.007 | 1.019 |
| 8 | 1.915 | 1.016 | 0.985 | 0.994 | 1.006 | 8 | 2.070 | 1.017 | 0.976 | 0.986 | 0.996 | ||
| 16 | 2.433 | 1.027 | 0.957 | 0.968 | 0.981 | 16 | 2.581 | 1.033 | 0.948 | 0.960 | 0.974 | ||
| 32 | 2.793 | 1.096 | 0.938 | 0.948 | 0.960 | 32 | 2.876 | 1.121 | 0.928 | 0.937 | 0.951 |
| Rotation Detectors Are Active for Simulating B10 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Subjects | Angular Thresholds from Experiment | Angular Thresholds from Simulation | Slopes from Experiment | Slopes from Simulation | Reaction Time from Experiment | Reaction Time from Simulation | Inhibitory Gain (k) | () | ( ) | Adaptation Onset () |
| ‘C12’ | 4.041 ± 1.06 | 5.252 ± 0.20 | 0.261 ± 0.030 | 0.263 ± 0.0049 | 0.994 ± 0.07 | 1.148 ± 0.0005 | 4 | 0.025 | 0.022 | 1.22 |
| ‘A10’ | 4.176 ± 1.08 | ˶ | 0.252 ± 0.029 | ˶ | 0.929 ± 0.04 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘B04’ | 4.506 ± 1.11 | ˶ | 0.246 ± 0.028 | ˶ | 1.194 ± 0.05 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘B01’ | 4.805 ± 1.13 | ˶ | 0.243 ± 0.027 | ˶ | 1.443 ± 0.06 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘A15’ | 5.321 ± 1.15 | 5.317 ± 0.19 | 0.242 ± 0.025 | 0.276 ± 0.005 | 1.131 ± 0.08 | 1.106 ± 0.0002 | 2 | 0.033 | 0.032 | 1.34 |
| ‘B05’ | 5.361 ± 1.05 | 5.201 ± 0.18 | 0.284 ± 0.028 | 0.307 ± 0.0055 | 1.165 ± 0.01 | 1.146 ± 0.0002 | 4 | 0.037 | 0.030 | 1.40 |
| ‘B09’ | 6.602 ± 1.42 | 6.872 ± 0.27 | 0.188 ± 0.021 | 0.180 ± 0.0036 | 1.001 ± 0.03 | 1.020 ± 0.0003 | 4 | 0.025 | 0.034 | 1.22 |
| ‘A11’ | 6.637 ± 1.52 | ˶ | 0.171 ± 0.023 | ˶ | 1.013 ± 0.05 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘A06’ | 6.609 ± 1.22 | 6.793 ± 0.25 | 0.233 ± 0.020 | 0.200 ± 0.0038 | 0.989 ± 0.03 | 0.883 ± 0.0002 | 8 | 0.033 | 0.032 | 1.10 |
| ‘A01’ | 7.000 ± 1.52 | 6.909 ± 0.25 | 0.175 ± 0.02 | 0.205 ± 0.0038 | 1.007 ± 0.01 | 1.089 ± 0.0003 | 8 | 0.030 | 0.034 | 1.40 |
| ‘C07’ | 7.097 ± 1.42 | ˶ | 0.192 ± 0.02 | ˶ | 1.169 ± 0.07 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘C11’ | 7.165 ± 1.39 | ˶ | 0.197 ± 0.02 | ˶ | 1.146 ± 0.08 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘B14’ | 7.692 ± 1.80 | 7.701 ± 0.36 | 0.147 ± 0.018 | 0.131 ± 0.0032 | 1.005 ± 0.04 | 1.076 ± 0.0009 | 1 | 0.024 | 0.026 | 0.96 |
| ‘B08’ | 7.753 ± 1.81 | ˶ | 0.146 ± 0.018 | ˶ | 0.923 ± 0.06 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘A02’ | 7.837 ± 1.87 | ˶ | 0.141 ± 0.018 | ˶ | 1.133 ± 0.04 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘A13’ | 7.873 ± 1.69 | ˶ | 0.159 ± 0.018 | ˶ | 1.203 ± 0.08 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘B11’ | 8.132 ± 2.00 | 8.459 ± 0.39 | 0.132 ± 0.017 | 0.124 ± 0.0031 | 1.065 ± 0.02 | 1.116 ± 0.0009 | 1 | 0.024 | 0.028 | 1.00 |
| ‘C13’ | 8.594 ± 2.09 | ˶ | 0.128 ± 0.017 | ˶ | 1.147 ± 0.05 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘C04’ | 9.173 ± 1.78 | 9.685 ± 0.35 | 0.158 ± 0.017 | 0.148 ± 0.003 | 0.887 ± 0.03 | 0.880 ± 0.0003 | 16 | 0.025 | 0.034 | 1.04 |
| ‘B03’ | 9.191 ± 2.64 | 9.292 ± 0.45 | 0.103 ± 0.016 | 0.111 ± 0.0029 | 1.141 ± 0.07 | 1.181 ± 0.0012 | 2 | 0.024 | 0.028 | 1.00 |
| ‘C06’ | 9.543 ± 2.34 | 9.709 ± 0.41 | 0.118 ± 0.016 | 0.123 ± 0.0029 | 0.899 ± 0.05 | 1.078 ± 0.001 | 2 | 0.024 | 0.030 | 0.90 |
| ‘B07’ | 9.589 ± 2.86 | ˶ | 0.096 ± 0.016 | ˶ | 1.264 ± 0.07 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘C08’ | 9.747 ± 1.70 | 9.838 ± 0.32 | 0.170 ± 0.017 | 0.167 ± 0.0031 | 0.947 ± 0.05 | 0.944 ± 0.0003 | 32 | 0.033 | 0.032 | 1.22 |
| ‘A03’ | 10.490 ± 1.56 | 12.076 ± 0.43 | 0.130 ± 0.011 | 0.130 ± 0.0028 | 0.964 ± 0.04 | 0.858 ± 0.0006 | 32 | 0.025 | 0.340 | 0.88 |
| ‘A04’ | 10.801 ± 2.20 | ˶ | 0.132 ± 0.016 | ˶ | 0.757 ± 0.05 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘A07’ | 10.843 ± 2.26 | ˶ | 0.128 ± 0.016 | ˶ | 0.871 ± 0.05 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘A05’ | 10.770 ± 2.72 | 10.747 ± 0.41 | 0.105 ± 0.015 | 0.130 ± 0.0029 | 1.098 ± 0.06 | 1.068 ± 0.0014 | 4 | 0.024 | 0.028 | 0.80 |
| ‘C01’ | 10.830 ± 2.61 | ˶ | 0.110 ± 0.016 | ˶ | 0.909 ± 0.06 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘A08’ | 12.132 ± 2.76 | 12.722 ± 0.45 | 0.109 ± 0.015 | 0.124 ± 0.0027 | 0.793 ± 0.03 | 0.962 ± 0.0013 | 4 | 0.024 | 0.032 | 0.66 |
| ‘B02’ | 12.173 ± 2.68 | ˶ | 0.113 ± 0.015 | ˶ | 0.936 ± 0.05 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘B06’ | 12.525 ± 2.82 | ˶ | 0.108 ± 0.015 | ˶ | 0.888 ± 0.06 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘B13’ | 12.860 ± 3.94 | 11.549 ± 0.49 | 0.078 ± 0.015 | 0.109 ± 0.0028 | 1.032 ± 0.06 | 1.067 ± 0.0011 | 2 | 0.024 | 0.034 | 0.84 |
| *’B10’ | 13.160 ± 3.02 | 13.363 ± 0.56 | 0.103 ± 0.015 | 0.101 ± 0.0027 | 1.044 ± 0.06 | 1.208 ± 0.0009 | 64 | 0.025 | 0.036 | 1.15 |
| ‘A14’ | 16.617 ± 4.89 | 17.319 ± 0.74 | 0.071 ± 0.014 | 0.088 ± 0.0025 | 1.058 ± 0.06 | 1.154 ± 0.0017 | 4 | 0.024 | 0.038 | 0.60 |
| ‘A09’ | 17.194 ± 5.84 | ˶ | 0.061 ± 0.014 | ˶ | 1.014 ± 0.04 | ˶ | ˶ | ˶ | ˶ | ˶ |
| ‘C02’ | 17.787 ± 5.36 | ˶ | 0.068 ± 0.014 | ˶ | 0.842 ± 0.04 | ˶ | ˶ | ˶ | ˶ | ˶ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Misaghian, K.; Lugo, J.E.; Faubert, J. “Extended Descriptive Risk-Averse Bayesian Model” a More Comprehensive Approach in Simulating Complex Biological Motion Perception. Biomimetics 2024, 9, 27. https://doi.org/10.3390/biomimetics9010027
Misaghian K, Lugo JE, Faubert J. “Extended Descriptive Risk-Averse Bayesian Model” a More Comprehensive Approach in Simulating Complex Biological Motion Perception. Biomimetics. 2024; 9(1):27. https://doi.org/10.3390/biomimetics9010027
Chicago/Turabian StyleMisaghian, Khashayar, J. Eduardo Lugo, and Jocelyn Faubert. 2024. "“Extended Descriptive Risk-Averse Bayesian Model” a More Comprehensive Approach in Simulating Complex Biological Motion Perception" Biomimetics 9, no. 1: 27. https://doi.org/10.3390/biomimetics9010027
APA StyleMisaghian, K., Lugo, J. E., & Faubert, J. (2024). “Extended Descriptive Risk-Averse Bayesian Model” a More Comprehensive Approach in Simulating Complex Biological Motion Perception. Biomimetics, 9(1), 27. https://doi.org/10.3390/biomimetics9010027