
Research on Adhesion Performance of Track Monomer with Bionic Structure


Abstract
1. Introduction
2. Materials and Methods
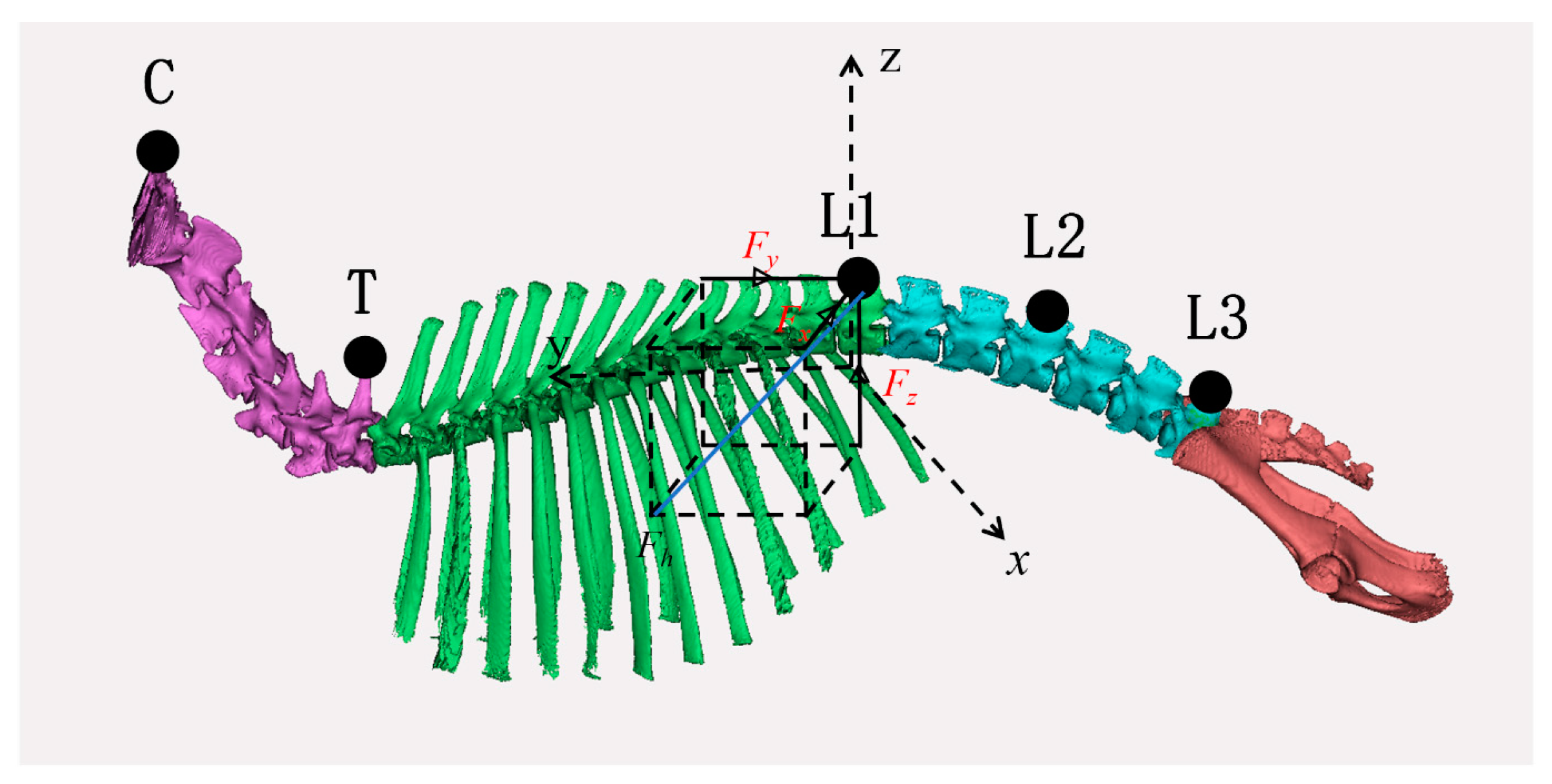
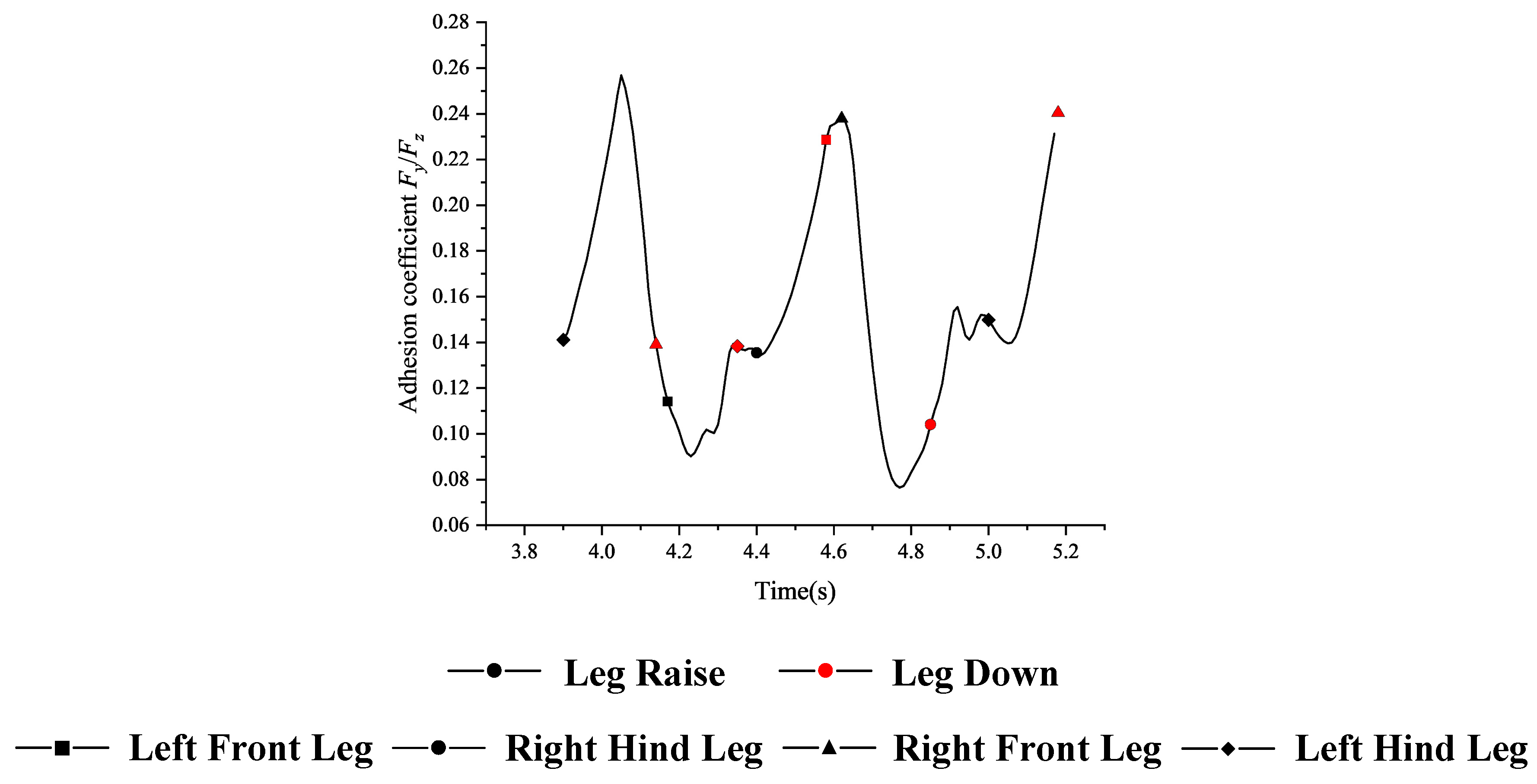
2.1. Analysis of Interaction Between Track Monomer and Soil
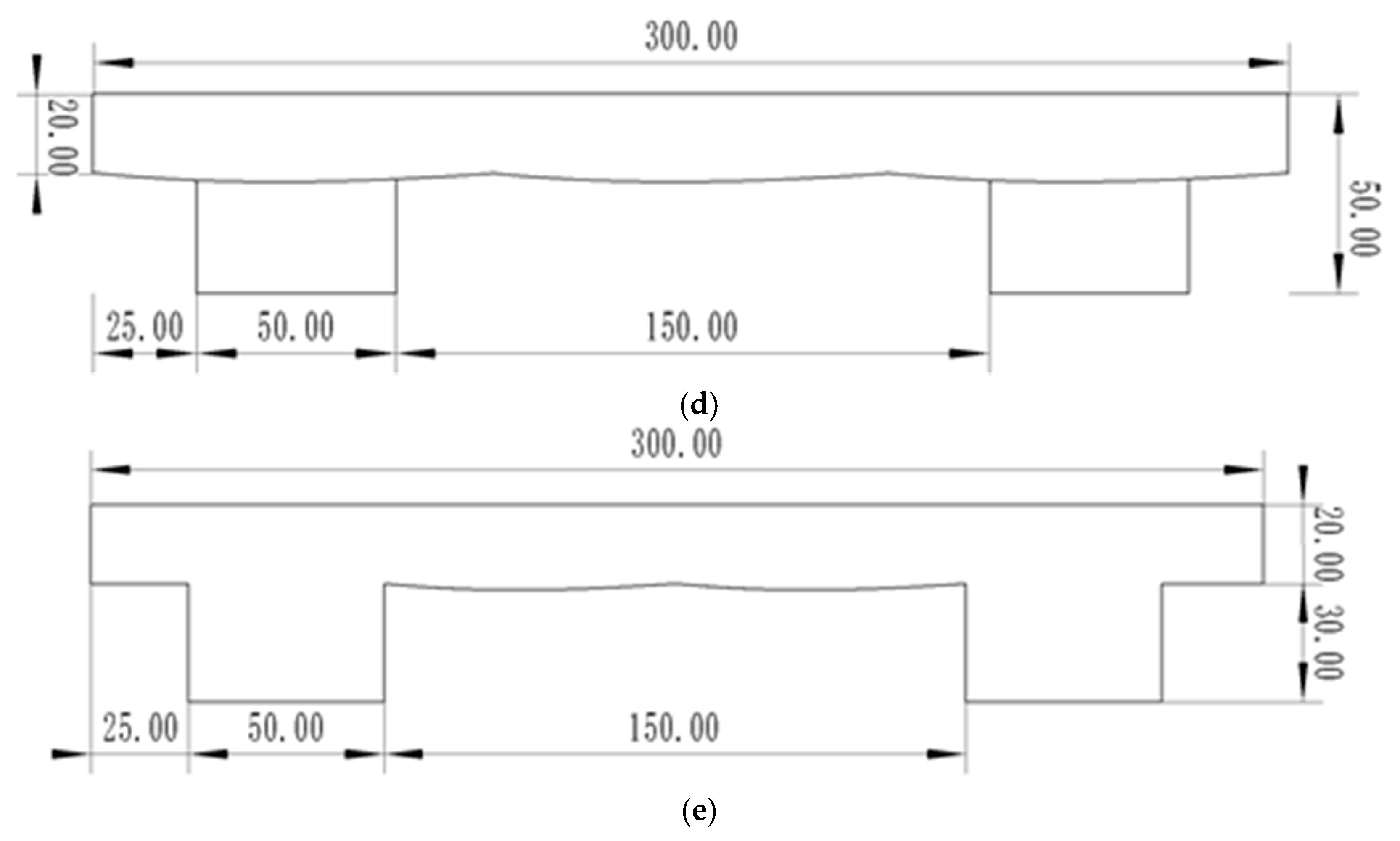
2.2. Bionic Structure Design of Track Monomer
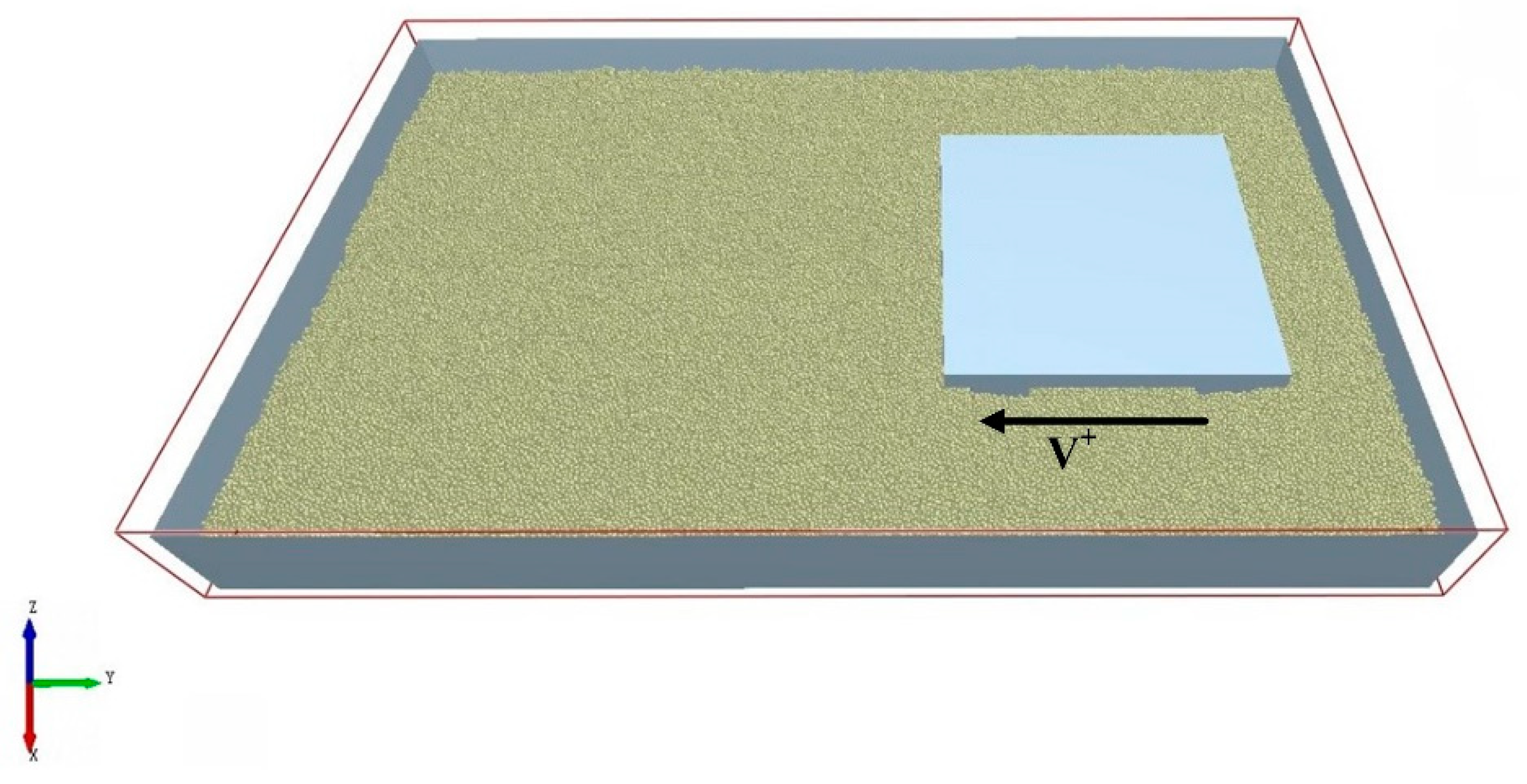
2.3. Construction of Track Monomer-Soil Interaction Simulation Model
- (1)
- Material intrinsic parameters
- (1.1) Soil moisture content
- (1.2) Soil density
- (1.3) Soil Poisson’s ratio
- (1.4) Soil elastic modulus
- (2)
- Material contact and contact model parameters
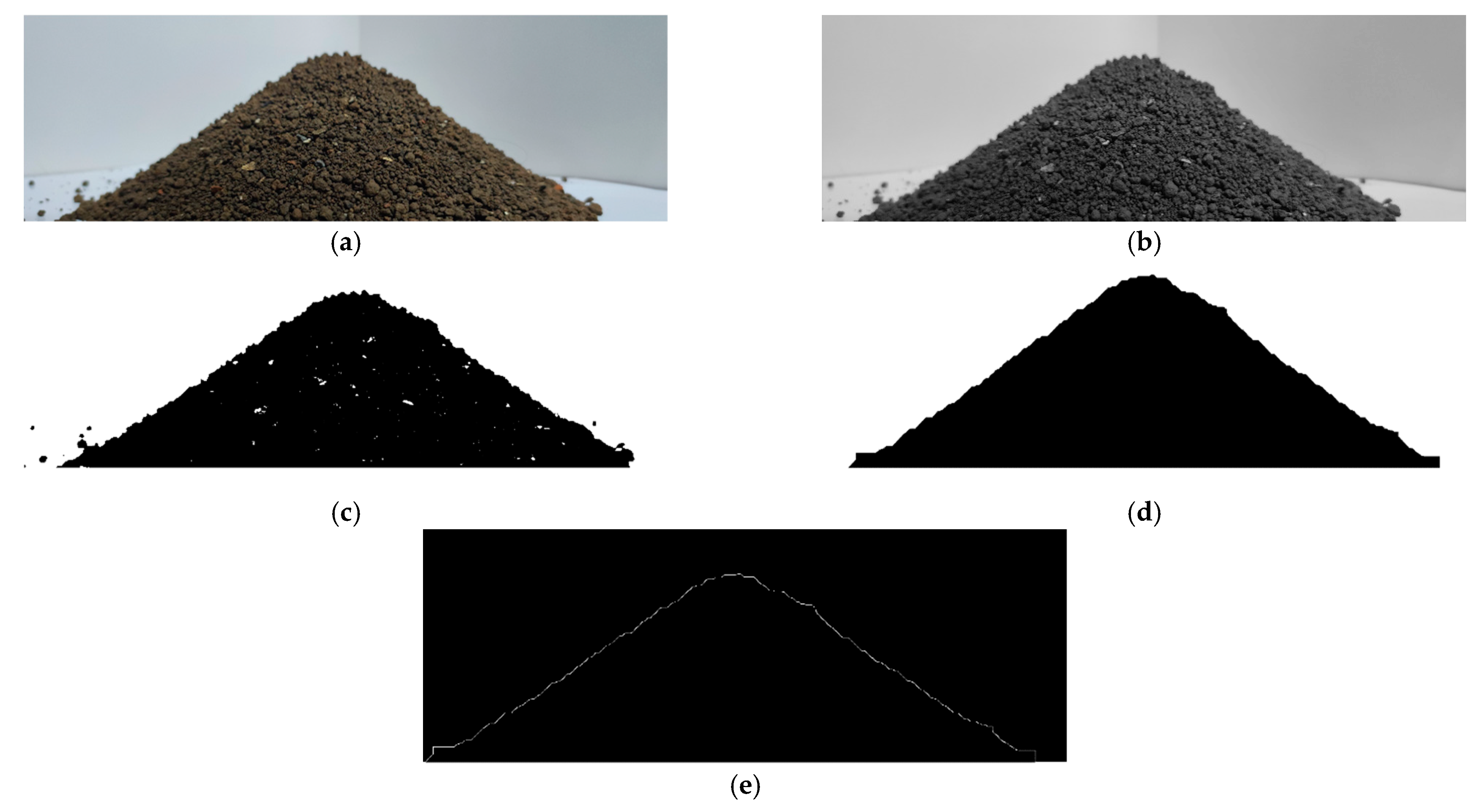
- (2.1) Physical test of repose angle
- (2.2) Construction of virtual geometric model of repose angle test and setting of initial parameters
2.4. Preparation of Rubber Track Monomer Sample
- (1)
- Mold preparation: According to the designed three-dimensional model of the bionic structure of the track monomer, the silica gel pouring mold was designed and manufactured by laser wire cutting technology.
- (2)
- Colloid preparation: In order to increase the fluidity of silica gel material, silica gel material and curing agent were added in the container at a ratio of 100:1.8 and stirred in the same direction to break the large bubbles and reduce the bubbles.
- (3)
- Pouring and curing: In order to facilitate the release and reduce the damage to the silicone during the release process, the release agent was evenly sprayed at the position 20–25 cm away from the mold during operation. The stirred silica gel material was slowly injected into the mold, while shaking the mold from side to side to ensure that the silica gel was fully injected. After injection into the mold, an area of stainless steel plate was placed on the surface, and release agent was evenly sprayed on the surface of the stainless steel plate in contact with the silicone material. Then, heavy objects were evenly placed on the surface of the stainless steel plate, and the mold was frozen in the refrigerator for 30 min to reduce bubbles. After the completion of pouring, in order to ensure the curing quality of the silicone, the mold was fixed for 4 h, the edge was trimmed, and the mold was removed.
2.5. Building of Soil Tank Test System
- (1)
- First, the soil loosening tool was used to sort out the soil, and the track monomer was smoothly placed on the soil surface according to the length of the traction wire rope. When placed, the geometric center line of the track monomer was in the same straight line with the fixed pulley. At the same time, in order to avoid the boundary effect of soil disturbed by the track monomer touching the inner wall of the soil tank, it was necessary to ensure that the boundary of the track monomer was more than 10 cm away from the inner wall of the soil tank when placing the track monomer.
- (2)
- After the track monomer was placed according to the requirements, the track monomer was sunk into the soil to ensure that the soil was not over the grouser, the silica gel contact surface of the monomer sample completely contacted the soil, and, then, the test began. The placement of track monomer sample is shown in Figure 11.
- (3)
- The traction process should ensure that the traction position of the testing machine and the fixed pulley were in the same straight line. During the test, the traction speed was set to 480 mm/min, which was the same as the horizontal motion speed of the track monomer in the simulation test (the second stage motion speed). The test was stopped when the traction distance was set to 200 mm, and the traction distance was the same as the horizontal movement distance of the simulation test (the second stage movement distance). The test data were derived, and the next set of tests were carried out.
3. Results
3.1. Analysis of Discrete Element Simulation Results
- (1)
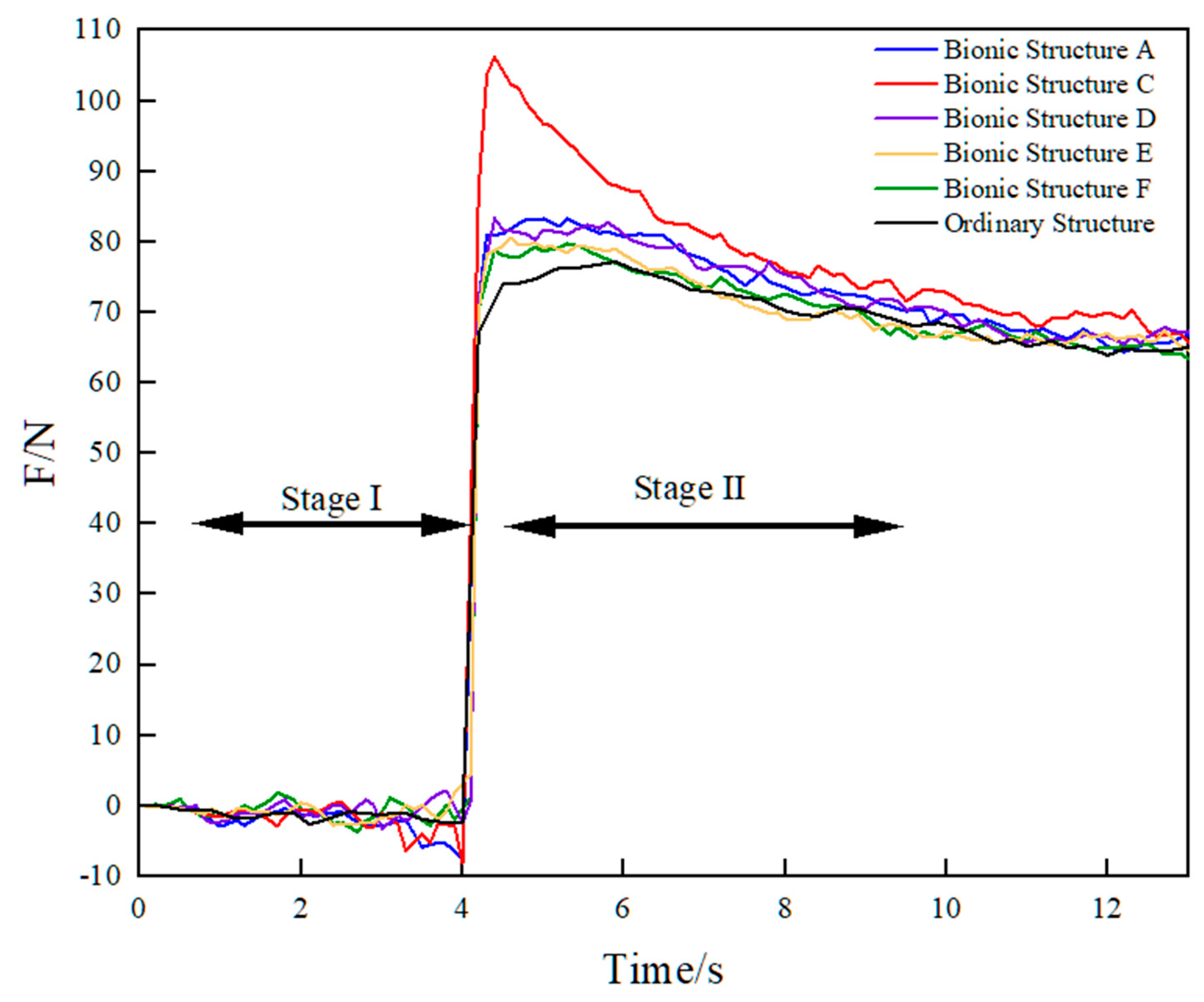
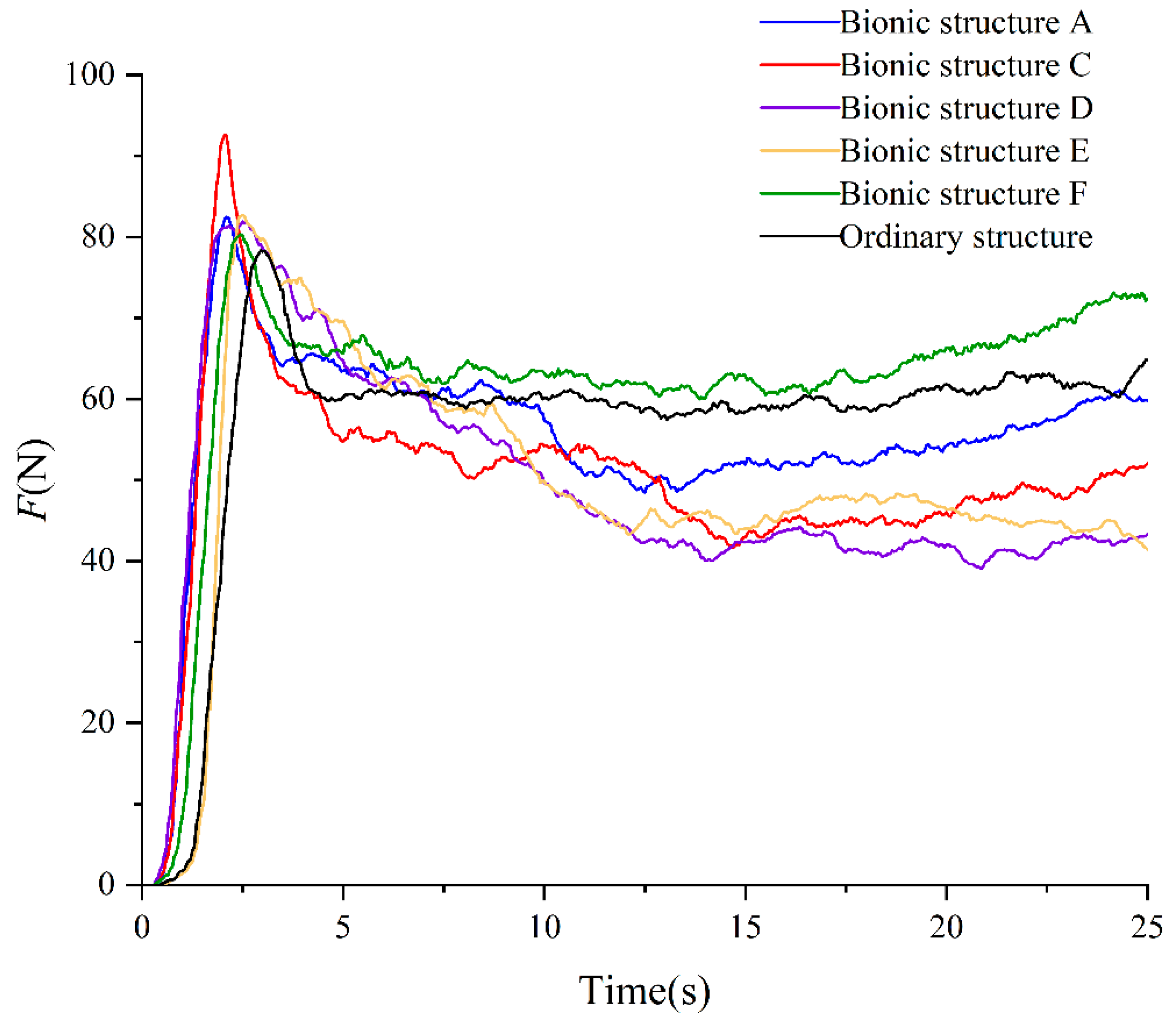
- Numerical analysis of tractive force
- (2)
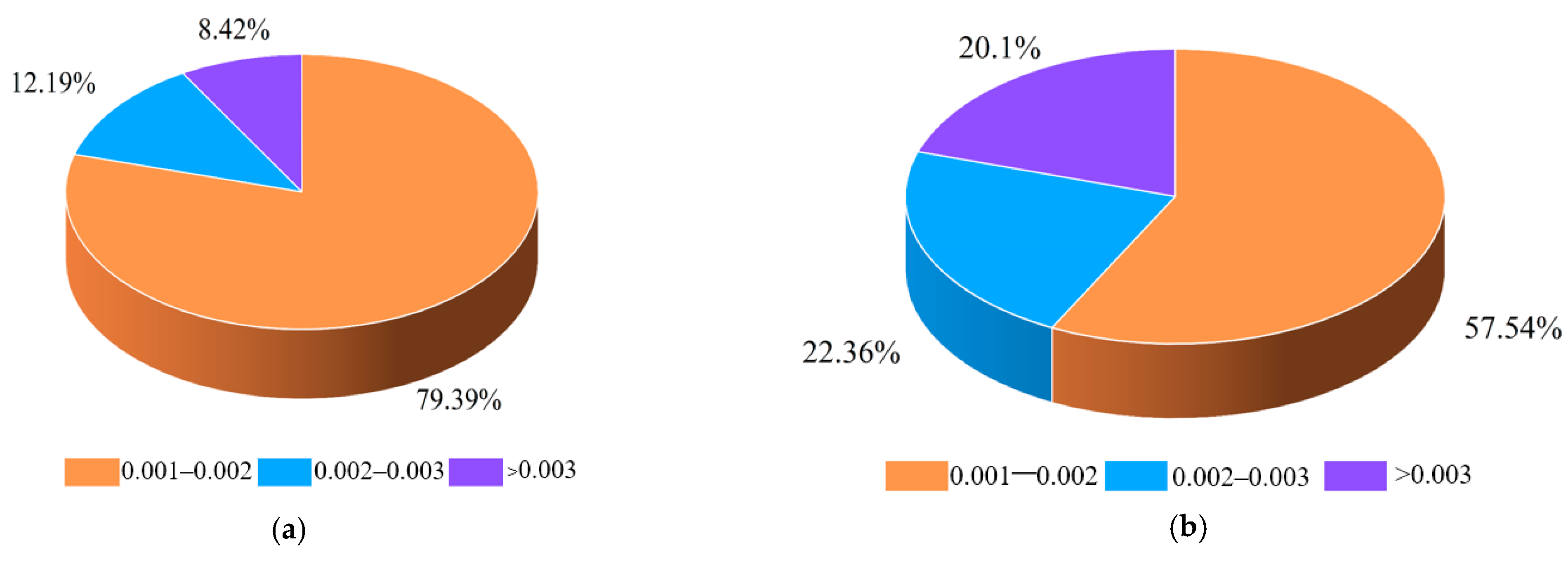
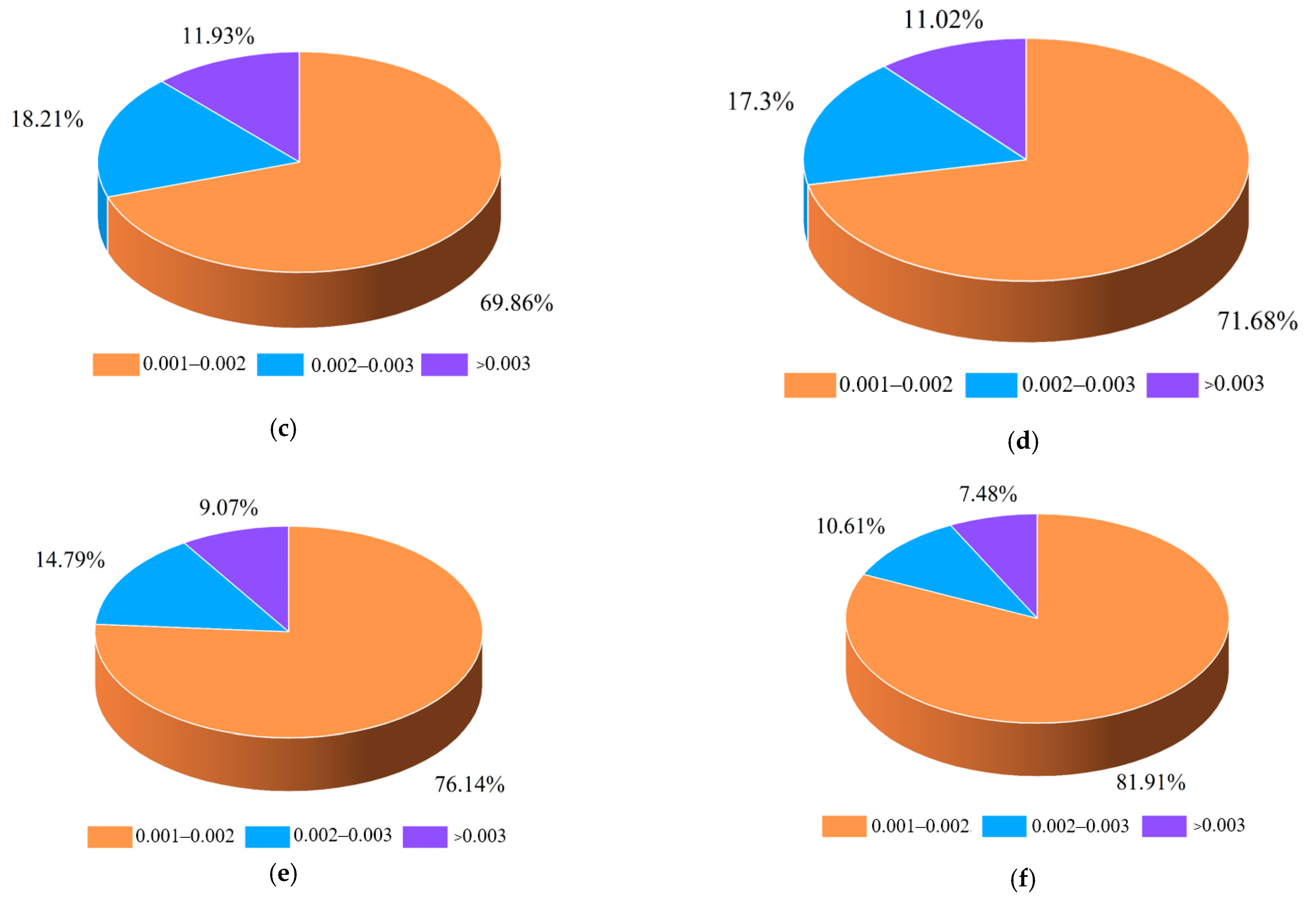
- Contact force field of soil particles
3.2. Analysis of Soil Tank Verification Test Results
4. Conclusions
- (1)
- The track monomer bionic structure was designed based on the above spinal space curve equation. Based on EDEM discrete element simulation parameter calibration and measurements, taking the maximum tractive force (adhesion) and the surface pressure of track monomer at the time of maximum adhesion as evaluation indexes, it was found that positive deformation of the bionic curve was the best, and the adhesion performance of track monomer with a positive deformation bionic curve was the best.
- (2)
- In order to further analyze the influence of bionic curve arrangement and placement on the adhesion performance of the track monomer, different bionic structures of the track monomer were designed. Soil trench test results showed that the adhesion force was 19.22 N higher than that of the ordinary structure of the tracked monomer, and the maximum error between simulation analysis and test verification was 9.02%, which verified the superiority of the design of the bionic structure of the tracked monomer.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Luo, X.; Liao, J.; Zang, Y.; Ou, Y.; Wang, P. Developing from Mechanized to Smart Agricultural Production in China. Strateg. Study CAE 2022, 24, 46–54. [Google Scholar] [CrossRef]
- Zhang, R.; Pang, H.; Ji, Q.; Li, G.; Dong, W.; Wen, L.; Li, J. Structure design and traction trafficability analysis of multiposture wheel-legs bionic walking wheels for sand terrain. J. Terramechanics 2020, 91, 31–43. [Google Scholar] [CrossRef]
- Huang, X.T.; Xie, H.; Li, J.K.; Chen, L.Y.; Dong, M.M.; Lü, W.W. Study on clay loam transmissibility of crawler agricultural equipment. J. Chin. Agric. Mech. 2023, 44, 114–119. [Google Scholar]
- Li, J. Research on Sliding and Sliding Test Device of Tracked Vehicle. Intern. Combust. Engine Parts 2022, 10–12. [Google Scholar]
- Sun, Y.H.; Hao, Y.; Shi, X.F.; Li, H. Analysis of Grouser Dimension for Vehicle Mobility Performance. J. Ordnance Equip. Eng. 2014, 35, 9–11. [Google Scholar]
- Zhang, J.Q.; Yang, F.Z.; Liu, S. Simulation of Hydraulic Steering By-wire System Based on Fuzzy PID Control. J. Agric. Mech. Res. 2013, 35, 190–193+198. [Google Scholar]
- Yang, C.B.; Dong, M.M.; Gu, L.; Li, Q.; Gao, X.D. Research on Soil Shear Strength Considering the Shape of Grouser. Trans. Beijing Inst. Technol. 2015, 35, 1118–1121. [Google Scholar]
- Li, Y.; He, D.C.; Si, Q.R.; Meng, X.P. Effect of track shoes structural parameters on traction performance of unmanned underwater tracked bulldozer. Ocean. Eng. 2021, 237, 109655. [Google Scholar] [CrossRef]
- Rifkin, R.E.; Grzeskowiak, R.M.; Mulon, P.Y.; Adair, H.S.; Biris, A.S.; Dhar, M.; Anderson, D.E. Use of a pressure-sensing walkway system for biometric assessment of gait characteristics in goats. PLoS ONE 2019, 14, e0223771. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.Y.; Kui, H.L.; Qian, Z.H.; Ren, L. Vertical ground reaction force characteristics of blue sheep based on different slopes walking. J. Zhejiang Univ. 2021, 55, 1668–1675+1704. [Google Scholar]
- Zhang, Q. Study on Anti-Slip and Buffer Characteristics of Goat Foot and Design of Bionic Foot; Jilin University: Changchun, China, 2019. [Google Scholar]
- Fu, J.; Li, J.; Fu, Q.; Qiao, Y. Development and verification of adhesion models for track shoes operating on clay soils. Biosyst. Eng. 2023, 235, 69–82. [Google Scholar] [CrossRef]
- Fu, J.; Li, J.; Tang, X.; Wang, R.; Chen, Z. Optimization of Structure Parameters of the Grouser Shoes for Adhesion Reduction under Black Soil. Agriculture 2021, 11, 795. [Google Scholar] [CrossRef]
- Li, G.; Zhao, J.; Li, M.; Chen, X.; Li, Z.; Yu, A.; Yu, L. Numerical investigation of shear effects between seafloor sediment and grousers of deep-sea mining vehicles: A comparison of bionic buffalo hoof grousers and straight grousers. Ocean. Eng. 2025, 321, 120407. [Google Scholar] [CrossRef]
- Yang, C.B. Research on the Adhesion Property of High-Speed Track on Soft Ground and Optimization of Track Shoe; Beijing Institute of Technology: Beijing, China, 2015. [Google Scholar]
- Pan, G. Reserach on Adhesion Characteristics of a Hillside Trackedtractor and the Application in Climbing Obstacles; Northwest A & F University: Shaanxi, China, 2021. [Google Scholar]
- Zhang, F.; Cui, X.; Wang, S. Analysis of Kinematic Characteristics of Saanen Goat Spine under Multi-Slope. Biomimetics 2022, 7, 181. [Google Scholar] [CrossRef] [PubMed]
- Tian, X.L.; Cong, X.; Qi, J.T.; Guo, H.; Li, M.; Fan, X.H. Parameter Calibration of Discrete Element Model for Corn Straw-Soil Mixture in Black Soil Areas. Trans. Chin. Soc. Agric. Mach. 2021, 52, 100–108+242. [Google Scholar]
- Han, W.; Wang, S.Z.; Zhang, Q.; Tian, Y.H. Discrete element parameter calibration of micron sized powder particles based on JKR contact model. China Powder Sci. Technol. 2021, 27, 60–69. [Google Scholar]
- Wang, Y.X.; Liang, Z.J.; Zhang, D.X.; Cui, T.; Shi, S.; Li, K.H.; Yang, L. Calibration method of contact characteristic parameters for corn seeds based on EDEM. Trans. Chin. Soc. Agric. Eng. 2016, 32, 36–42. [Google Scholar]
- Ma, S.; Xu, L.M.; Yuan, Q.C.; Niu, C.; Zeng, J.; Chen, C.; Wang, S.S.; Yuan, X.T. Calibration of discrete element simulation parameters of grapevine antifreezing soil and its interaction with soil-cleaning components. Trans. Chin. Soc. Agric. Eng. 2020, 36, 40–49. [Google Scholar]
- You, X.C.; Yu, J.H.; Qian, S.H.; Cao, S. Research on design and deformation of flexible soft-bodied manipulator. Mod. Manuf. Eng. 2020, 10, 45–50. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation Indexes | The Three-Dimensional Force | Moving | Lowess | Loess | Sgolay | Rlowess | Rloess |
|---|---|---|---|---|---|---|---|
| SNR | 23.7108 | 24.9864 | 26.0318 | 25.3184 | 23.8431 | 25.3032 | |
| 35.5948 | 37.5373 | 39.3775 | 38.2828 | 34.4383 | 37.8937 | ||
| 53.6476 | 56.2609 | 58.9847 | 57.1225 | 52.0155 | 56.7734 | ||
| 54.4331 | 58.0150 | 62.0709 | 59.6972 | 50.8870 | 57.4044 | ||
| 59.6121 | 63.7341 | 66.8021 | 65.9467 | 55.5029 | 62.9150 | ||
| 62.3318 | 66.1048 | 68.7752 | 67.9366 | 56.2001 | 64.7932 | ||
| RMSE | 0.0118 | 0.0102 | 0.0090 | 0.0098 | 0.0116 | 0.0098 | |
| 0.0171 | 0.0137 | 0.0111 | 0.0125 | 0.0195 | 0.0131 | ||
| 0.0198 | 0.0147 | 0.0107 | 0.0133 | 0.0239 | 0.0138 | ||
| 0.0371 | 0.0246 | 0.0154 | 0.0203 | 0.0559 | 0.0264 | ||
| 0.0515 | 0.0320 | 0.0225 | 0.0248 | 0.0826 | 0.0352 | ||
| 0.0806 | 0.0522 | 0.0384 | 0.0423 | 0.1634 | 0.0607 | ||
| R2 | 0.9672 | 0.9756 | 0.9808 | 0.9774 | 0.9682 | 0.9773 | |
| 0.9842 | 0.9899 | 0.9934 | 0.9915 | 0.9794 | 0.9907 | ||
| 0.9954 | 0.9975 | 0.9986 | 0.9979 | 0.9932 | 0.9977 | ||
| 0.9943 | 0.9975 | 0.9990 | 0.9983 | 0.9871 | 0.9971 | ||
| 0.9983 | 0.9994 | 0.9997 | 0.9996 | 0.9957 | 0.9992 | ||
| 0.9989 | 0.9996 | 0.9998 | 0.9997 | 0.9956 | 0.9994 |
| Soil Intrinsic Parameter | Value |
|---|---|
| moisture content | 12.73% |
| density | 1.50 g/cm3 |
| Poisson’s ratio | 0.31 |
| elastic modulus | 1.60 × 107 Pa |
| Variable | Experimental Factors | Low Level | Center Level | High Level |
|---|---|---|---|---|
| A | JKR surface energy | 0 | 8 | 16 |
| B | recovery coefficient | 0.15 | 0.45 | 0.75 |
| C | static friction coefficient | 0.20 | 0.68 | 1.16 |
| D | rolling friction coefficient | 0 | 0.1 | 0.2 |
| No. | Experiment Factors | Experiment Index | |||
|---|---|---|---|---|---|
| JKR Surface Energy (J/m2) | Recovery Coefficient | Static Friction Coefficient | Rolling Friction Coefficient | Soil Repose Angle (°) | |
| 1 | 0 | 0.15 | 0.68 | 0.1 | 24.17 |
| 2 | 0 | 0.45 | 0.2 | 0.1 | 20.34 |
| 3 | 0 | 0.45 | 0.68 | 0 | 20.24 |
| 4 | 0 | 0.45 | 0.68 | 0.2 | 26.12 |
| 5 | 0 | 0.45 | 1.16 | 0.1 | 29.00 |
| 6 | 0 | 0.75 | 0.68 | 0.1 | 22.73 |
| 7 | 8 | 0.45 | 0.68 | 0.1 | 34.20 |
| 8 | 8 | 0.15 | 0.2 | 0.1 | 33.84 |
| 9 | 8 | 0.15 | 0.68 | 0 | 36.97 |
| 10 | 8 | 0.15 | 0.68 | 0.2 | 37.34 |
| 11 | 8 | 0.15 | 1.16 | 0.1 | 40.90 |
| 12 | 8 | 0.45 | 0.2 | 0 | 34.34 |
| 13 | 8 | 0.45 | 0.2 | 0.2 | 35.25 |
| 14 | 8 | 0.45 | 0.68 | 0.1 | 33.33 |
| 15 | 8 | 0.45 | 0.68 | 0.1 | 33.73 |
| 16 | 8 | 0.45 | 0.68 | 0.1 | 33.75 |
| 17 | 8 | 0.45 | 0.68 | 0.1 | 33.69 |
| 18 | 8 | 0.45 | 1.16 | 0 | 34.86 |
| 19 | 8 | 0.45 | 1.16 | 0.2 | 36.41 |
| 20 | 8 | 0.75 | 0.2 | 0.1 | 41.00 |
| 21 | 8 | 0.75 | 0.68 | 0 | 35.25 |
| 22 | 8 | 0.75 | 0.68 | 0.2 | 39.12 |
| 23 | 8 | 0.75 | 1.16 | 0.1 | 42.38 |
| 24 | 16 | 0.15 | 0.68 | 0.1 | 44.89 |
| 25 | 16 | 0.45 | 0.2 | 0.1 | 47.96 |
| 26 | 16 | 0.45 | 0.68 | 0 | 47.29 |
| 27 | 16 | 0.45 | 0.68 | 0.2 | 45.57 |
| 28 | 16 | 0.45 | 1.16 | 0.1 | 45.95 |
| 29 | 16 | 0.75 | 0.68 | 0.1 | 44.27 |
| Source of Variance | Quadratic Sum | Degree of Freedom | Mean Square | F Value | p Value | Significance |
|---|---|---|---|---|---|---|
| model | 1646.74 | 14 | 117.62 | 30.89 | <0.0001 | ** |
| A | 1481.41 | 1 | 1481.41 | 389.07 | <0.0001 | ** |
| B | 3.67 | 1 | 3.67 | 0.9650 | 0.3426 | |
| C | 23.44 | 1 | 23.44 | 6.16 | 0.0264 | * |
| D | 9.83 | 1 | 9.83 | 2.58 | 0.1304 | |
| AB | 0.1681 | 1 | 0.1681 | 0.0441 | 0.8366 | |
| AC | 28.46 | 1 | 28.46 | 7.48 | 0.0161 | * |
| AD | 14.44 | 1 | 14.44 | 3.79 | 0.0718 | |
| BC | 8.07 | 1 | 8.07 | 2.12 | 0.1676 | |
| BD | 3.06 | 1 | 3.06 | 0.8043 | 0.3850 | |
| CD | 0.1024 | 1 | 0.1024 | 0.0269 | 0.8721 | |
| A2 | 2.70 | 1 | 2.70 | 0.7087 | 0.4140 | |
| B2 | 37.25 | 1 | 37.25 | 9.78 | 0.0074 | ** |
| C2 | 34.84 | 1 | 34.84 | 9.15 | 0.0091 | ** |
| D2 | 2.61 | 1 | 2.61 | 0.6842 | 0.4220 | |
| pure error | 0.3824 | 4 | 0.0956 | |||
| total | 1700.05 | 28 |
| No. | Structure | Maximum Adhesion Value (N) | Adhesion Value Optimization Effect (N) |
|---|---|---|---|
| 1 | A | 83.29 | 6.13 |
| 2 | C | 106.27 | 29.11 |
| 3 | D | 83.35 | 6.19 |
| 4 | E | 80.54 | 3.38 |
| 5 | F | 79.76 | 2.60 |
| 6 | Ordinary | 77.16 | -- |
| No. | Structures | Simulated Adhesion Value (N) | Test Adhesion Value (N) | Error (%) |
|---|---|---|---|---|
| 1 | A | 83.29 | 85.04 | 2.06 |
| 2 | C | 106.27 | 97.48 | 9.02 |
| 3 | D | 83.35 | 86.41 | 3.54 |
| 4 | E | 80.54 | 82.77 | 2.69 |
| 5 | F | 79.76 | 80.39 | 0.78 |
| 6 | Ordinary | 77.16 | 78.26 | 1.41 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, S.; Cui, X.; Yang, L.; Wang, X.; Guo, Z.; Zhang, F. Research on Adhesion Performance of Track Monomer with Bionic Structure. Biomimetics 2025, 10, 250. https://doi.org/10.3390/biomimetics10040250
Fu S, Cui X, Yang L, Wang X, Guo Z, Zhang F. Research on Adhesion Performance of Track Monomer with Bionic Structure. Biomimetics. 2025; 10(4):250. https://doi.org/10.3390/biomimetics10040250
Chicago/Turabian StyleFu, Sanling, Xiahua Cui, Le Yang, Xinyue Wang, Zhijun Guo, and Fu Zhang. 2025. "Research on Adhesion Performance of Track Monomer with Bionic Structure" Biomimetics 10, no. 4: 250. https://doi.org/10.3390/biomimetics10040250
APA StyleFu, S., Cui, X., Yang, L., Wang, X., Guo, Z., & Zhang, F. (2025). Research on Adhesion Performance of Track Monomer with Bionic Structure. Biomimetics, 10(4), 250. https://doi.org/10.3390/biomimetics10040250