1. Introduction
Most real systems, especially in the industrial and engineering fields, do not require very sophisticated control strategies to achieve good performance. However, to achieve the required specifications of precision, minimum control effort, energy savings, etc., it is essential that the regulators are well designed and configured [
1].
The task of adjusting regulators is a laborious and non-trivial job. Hence, numerous techniques have been applied for the optimal adjustment of their parameters, and it remains an open topic for research since the requirements are increasingly demanding [
2].
Furthermore, thanks to technological and computational advances, it has been possible to address the control of increasingly complex, non-linear systems, with coupled variables and disturbances. But this requires a greater effort in the design and adjustment of the controllers.
In this work, this challenge is addressed by applying two meta-heuristic techniques for the optimal adjustment of a conventional controller for two real systems.
The conventional controller is a Proportional–Integral–Derivative (or
PID), which is possibly the most widespread feedback control strategy in industry [
3]. The
PID control approach offers, in its most simplified setting [
4], a control action
determined as the weighted superposition of an error measure
, its temporal integral and its derivative, namely:
This simple formulation is sufficiently flexible to, upon proper setting (i.e.,
tuning) of the parameters
, provide satisfactory results in many situations. Note that, on many occasions, there might be many parameter combinations that lead to solutions of similar merit [
5].
There are many strategies to find those parameters
, e.g., the now classical Ziegler–Nichols heuristic method, or the pole placement approach, for instance; these methods work specially well for systems that can be accurately described with low order models, and wherever noise is not a concern [
6].
More recently, more sophisticated,
intelligent methods have been introduced, and have been applied not only to tackle new control challenges, but also to revisit the
PID tuning problem [
7,
8,
9]. Among these intelligent techniques, the so–called metaheuristic optimization algorithms have risen as a promising strategy [
10]. Genetic Algorithms (
GA) and Particle Swarm Optimization (
PSO) algorithms are well known methods of this class, that happen to be inspired by biological processes [
11,
12,
13,
14]. In this sense, neither
GA nor
PSO are a novelty: a plethora of nature–inspired metaheuristic optimization algorithms exists; a taxonomy for those is provided in [
8].
Among those methods, in this work we focus on two recent and relatively more unknown nature–inspired metaheuristic optimization algorithms: the Antlion Optimizer (or
ALO [
15]), and the Whale Optimization Algorithm (or
WOA [
16]). The first one draws from the stalking behavior of antlions, whereas the second tries to mimick the cooperative hunting behavior of humpback and Bryde’s whales. Both methods evidence an effective performance on a wide array of non–linear optimization problems.
Specifically, this paper analyzes the performance of these two bio–inspired metaheuristic optimization algorithms for tuning proportional–integral controllers (
PI, i.e., with
in Equation (
1)). The objective is to see their applicability in the control of complex non–linear systems and their dependence on the algorithms initial and configuration parameters. To do so, their application to two different dynamic systems is compared: the electromechanical hoop & ball system (
HB), as a system where a linearized description is adequate; and a wind turbine–generator–rectifier–load (
WTGRL) system, as an example of a system with a complex and nonlinear dynamics. To our knowledge, these techniques have not been applied in the field of control of these systems. Our objective is to evaluate the applicability of the
ALO and/or
WOA techniques to efficiently tune the
PI controllers using only information of feasible ranges for
and
gains.
The main contributions of this paper can be summarized as:
a methodology is proposed for the automatic optimal tuning of conventional PID controllers;
this methodology uses two advanced metaheuristic optimization algorithms of biological inspiration, the techniques ALO and WOA;
the only information needed is the feasible ranges for and ;
the performance of both optimization techniques has been compared in two nonlinear dynamic systems of increasing complexity, the hoop and ball system and the wind turbine-generator-rectifier-load system;
they have been compared with the solutions provided by other evolutionary techniques for the same hoop and ball system found in the literature;
a sensitivity analysis of the main parameters of the algorithms has been performed in terms of goodness of solution and computational time.
The rest of the document is organized as follows: next, we present the Methodology used in this work, including the systems modeling and the
ALO &
WOA optimization techniques description. In
Section 3, the results obtained with the two metaheuristic algorithms applied to the two non–linear systems are discussed. Finally, in
Section 4, we present the conclusions that can be drawn from this study, together with some recommendations for using the
ALO and
WOA to sintonize
PID controllers, and future works.
2. Methodology
In
Section 2.1 and
Section 2.2, we present the models of the dynamic systems considered in this work. Next, in
Section 2.3, we briefly review the two bioinspired metaheuristic algorithms leveraged for controller tuning.
2.1. The Hoop & Ball System
The Hoop & Ball (
HB) system, initially presented in [
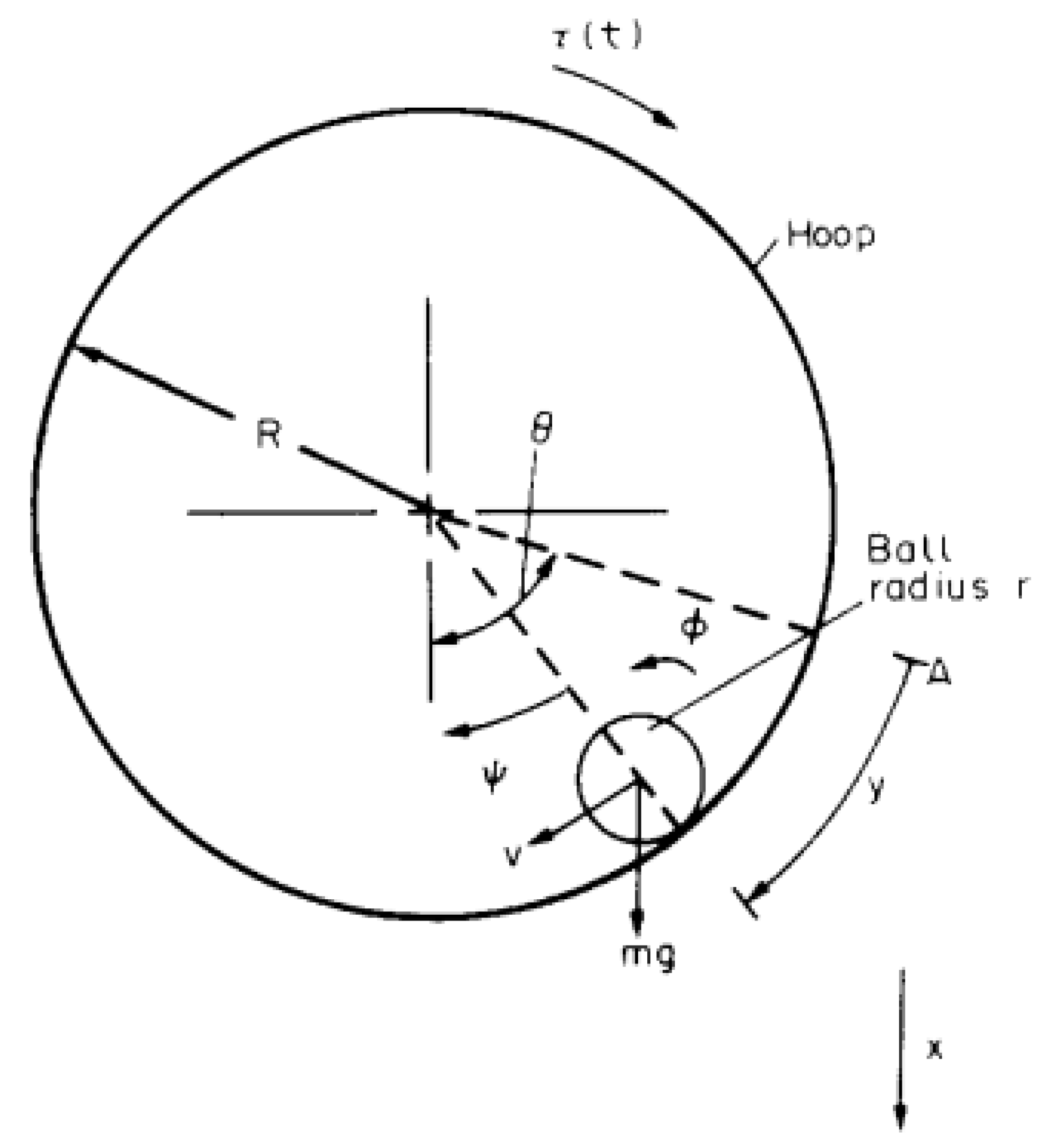
17], is a electro–mechanical non-linear dynamic system for which a linearized description is adequate over a relative wide range of conditions. This system consists of a small spherical bill of radius
, which is constrained to roll along the grooved interior surface of a hoop of radius
. This hoop is actioned by a servomotor connected to the hoop principal axis. A sketch of the
HB system is shown in
Figure 1.
This system is well established as an academic benchmark for testing control solutions. Although simple in construction, it shows an interesting behavior. Moreover, the ball–hoop system offers a useful analogy of the sloshing phenomenon, which is the fluid–structure interaction happening when a deposit partially filled with a liquid experiences a sudden acceleration/deceleration, i.e., in road or ship transportation, and more recently, it has been also considered for liquid metal cooled nuclear reactors.
Mathematical models of the Hoop–Ball systems of varying complexity are available in the bibliography [
17,
18]. The most general model is this non–linear system of equations [
19]:
where
R and
are respectively the hoop and ball radii, whereas
is the ball rolling radius; and
m is the ball mass. The inertia moments of hoop and ball are
and
. A servomotor actions the hoop with a moment
; this servomotor is affected by a friction
, whereas the rolling resistance of the ball is
. Finally, the relationship
closes the system of equations.
The system (
2) can be regard as a first order non–linear system by defining
and
, so that
and
. In this way, we obtain
Introducing now
, it is possible to reformulate Equation (
3) as:
It can be also expressed in more compact form as:
In this expression, it is possible to identify, on the right side, a linear contribution, another non–linear contribution proportional to , and the forcing term.
Under the assumption that and , . Thus, in the linearized model, the servomotor would act directly the hoop, which in turn excites the ball movement. The specific parameters of the HB model considered in this work are: m/s2, m, kg, kg, m, m, kg m2/s and kg m3/s.
In order to discretize the
HB model, the
matlab command
ode45 was used. The hoop axis is controlled by a Proportional Integral (
PI) controller, where the control signal is generated with feedback of the signal
:
where
is a sequence of step signals defined for
(see e.g.,
Figure 2c).
The tuning of the
and
gain is going to be carried out using the
ALO and
WOA optimization techniques, with the aim of minimizing the Squared Error norm
. The search space is defined for
and
[
20].
2.2. The Wind Turbine–Generator–Rectifier–Load System
Wind energy conversion systems are a typical example of a complex system, involving many mechanical, hydraulic, electrical, and electronic (possibly combined) subsystems that interact to reach a common goal, i.e.,extract power from the momentum in a wind stream [
21]. Therefore, modeling such systems can easily become complicated [
22,
23]. Regarding the goals of this contribution—extracting useful knowledge from the comparison of the
ALO and
WOA algorithms in the context of intelligent control of complex systems—we consider a relatively simple yet sufficiently rich model, inspired in those discussed in [
24,
25,
26,
27].
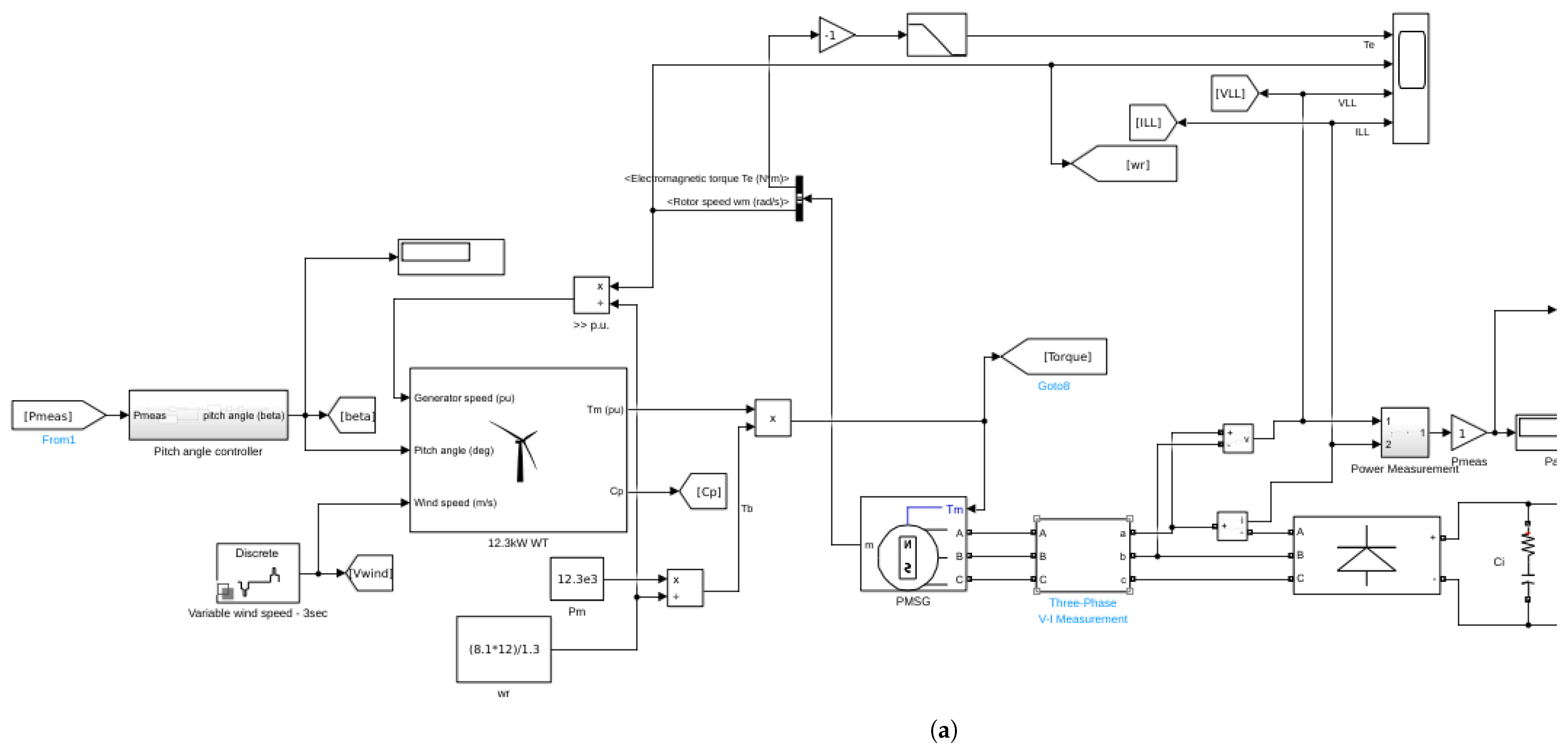
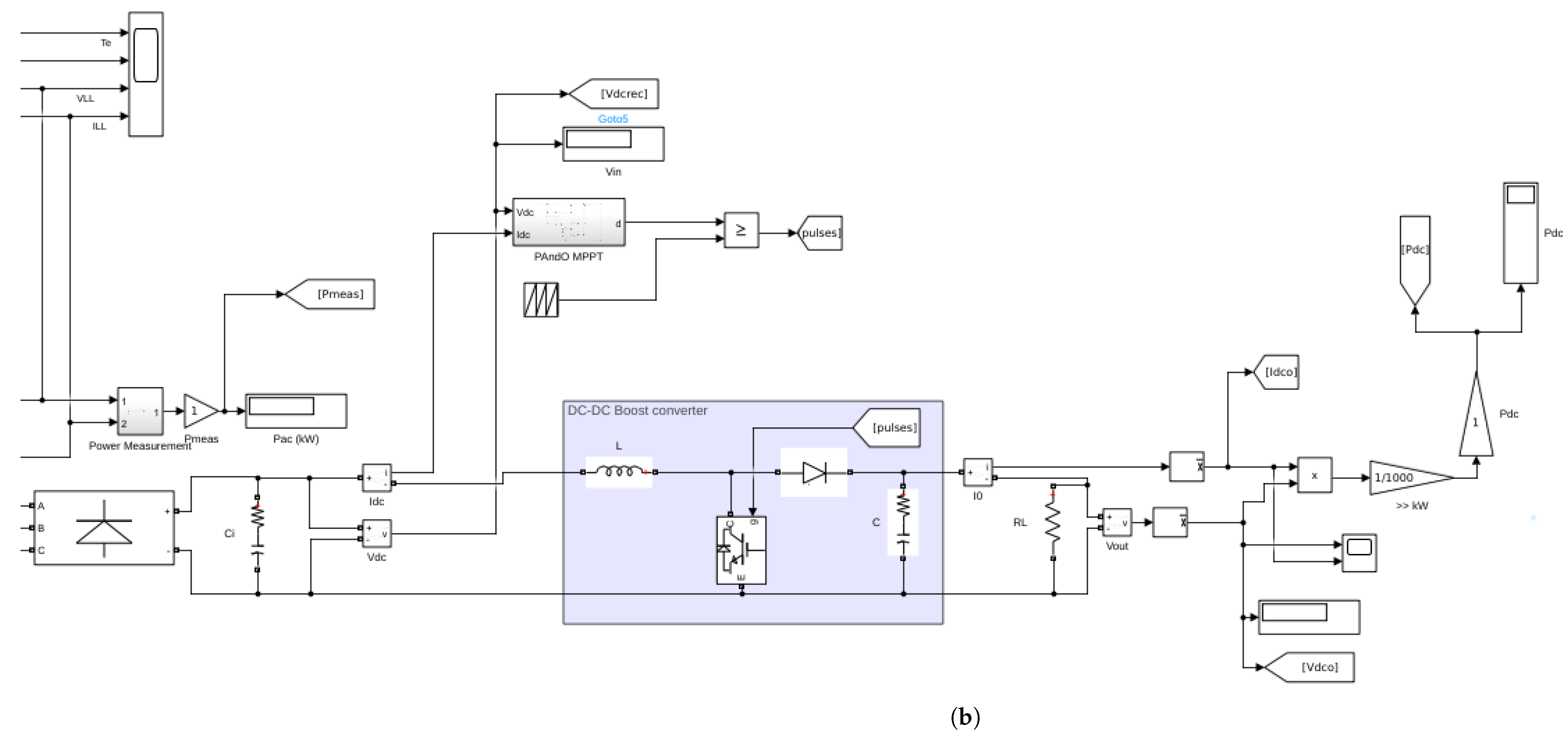
In this wind turbine–generator–rectifier–load system, a 12.3 kW three–bladed horizontal axis wind turbine is considered. It drives directly (i.e., no gearbox) a three–phase salient pole permanent magnet synchronous electric generator. This generator excites a rectifier module that enacts the AC/DC conversion; the rectifier, in turn, feeds through a DC-DC boost converter a resistive load of .
We consider that the turbine is exposed to several wind gusts,
Figure 3, acting in the interval
. The rectifier subsystem follows a Maximum Power Point Tracking (
MPPT) strategy, whereas in the operating regions of rated wind speed, a Proportional–Integral (
PI) controller adjusts the blade angle of attack (
). The angle of attack is constrained to remain in the range
, and is also affected by a Rate Limiter.
In our model we use
powergui: the simulation is performed in discrete mode (
s or
kHz), so that the
z-transfer function of the
PI controller is:
The simulink model for the WTGRL system is shown in
Figure 4.
The tuning values of
and
will be obtained with the two nature–inspired metaheuristic optimization algorithms (
ALO and
WOA). The optimization goal, in this case, is to dissipate as much power at the load
as possible. This power is given by,
Thus, the fitness function
J is defined as:
which is proportional to the discretized integral, quantifying the power dissipated at the load
. We shall explore the search space limited by
and
[
26,
27].
2.3. Metahuristic Optimization Algorithms
In this work we consider two metaheuristic optimization algorithms, the
Antlion Optimization Algorithm (
ALO) and the
Whale Optimization Algorithm (
WOA), both coined by Prof. S. Mirjalili’s research group. The biological phenomena that inspire these algorithms are illustrated in [
28] and [
29], respectively.
As metaheuristic algorithms, ALO and WOA present these advantages:
- i
they are formulated on simple principles and allow for an easy implementation;
- ii
the computing of the objective function gradient is not necessary;
- iii
they can avoid eventual local optima; and
- iv
they can be applied in many diverse fields.
The implementation of either algorithm is publicly available; and since they share a common interface, so once a script is coded for one of the techniques, it can be easily reused with ay other similar algorithm.
2.3.1. The Antlion Optimization Algorithm
We provide here a brief description of the
ALO technique, initially presented in [
15]; the corresponding pseudo–code is reproduced in Algorithm 1 [
30]. As a flock/swarm type algorithm,
ALO employs
ant agents, but also
antlion agents within a
d-dimensional space. The ants move through the space following a random walk in all their coordinates. On the other hand, antlions build
sand pit traps, whose sizes are larger the lower the value of the objective function (i.e., fitness) at a specific location. The movement of the ants must respect the constraints set by the lower
and upper
coordinate vectors. This can be achieved with a random walk given by:
if the function
is defined in terms of a uniform random variable
, so that
if
and 0 elsewhere. We ensure that all the agents remain in the search space
by resorting to the normalization:
where
and
are the minimum and maximum of the random walk for variable
i, and
y
are, respectively, the minimum and the maximum of the
i-th variable at the
k-th step.
The
ALO algorithm starts by randomly distributing the
ants and the
antlions over the feasible solution space. Next, the best antlion
is identified, namely, the antlion that
. Then, for the number of iterations chosen a priori,
, the ants wander throughout the search space, whereas the antlions attempt to hunt them down. This guarantees the exploration of the search space. On the other hand, the exploitation of the areas of interest is guaranteed by the progressive contraction of antlion sand pit traps, which can be modeled as:
where
I is a compression ratio, and
/
are the minimum/maximum of all the variables in the
k-th iteration.
Note how the combination of the ant random walks with the roulette wheel selection of the antlions contributes to avoid, with high probability, stagnating into local minima.
Even more, the random walk of each ant along every dimension fosters the diversity of the agents involved. And since the sand pit traps relocate to the position of the best ant found during the optimization, the promising areas of the search space are preserved.
Finally, elitism is applied, since the best antlion at every iteration is stored and compared against the best antlion so far (the elite). Algorithmically, ants roam randomly both around the antlion chosen by roulette wheel selection but also around the elite antlion:
where
denotes the trajectory around the antlion active in the current iteration, whereas
is the trajectory around the elite antlion.
The detailed procedure described above can be formalized in the successive application of three operators that can be found in [
15].
| Algorithm 1 The Antlion Optimization Algorithm [15]. |
- 1:
Algoritmo ALO() - 2:
Random initialization of ants and antlions . - 3:
Calculate the fitness of ants, and antlions . - 4:
Identify the best antlion (elite). - 5:
while do - 6:
for do - 7:
Choose an antlion using roulette wheel. - 8:
Update c and d with Equation ( 12). - 9:
Create a random walk (Equation ( 10)) and normalize it (Equation ( 11)). - 10:
Update the i-th ant position (Equation ( 13)). - 11:
end for - 12:
Recalculate the fitness of every ant. - 13:
Replace an antlion with the corresponding ant, provided it becomes fitter. - 14:
Update the elite agent if another antlion becomes better. - 15:
end while - 16:
return elite - 17:
end Algoritmo
|
2.3.2. The Whale Optimization Algorithm
A brief description of the
WOA technique with the corresponding pseudo–code is reproduced here as in Algorithm 2 and [
31].
WOA considers a pod (or herd) of
whales (or agents or particles), that evolve throughout a
d-dimensional space in search of prey, i.e., the local and/or global minima of the function
to be optimized. The whales movement remains in the interior of the cartesian product defined by the corresponding components of the lower
and upper
constrain vectors.
The algorithm begins by randomly distributing the whales over the feasible solution space; then, the best solution so far, , is singled out, namely, that one fulfilling .
For a pre-set number of iterations , the whale positions are updated, alternating phases of:
- i
prey search (exploration or diversification),
- ii
prey encircling, and
- iii
bubble net attacking (exploitation or intensification).
At every iteration k, and for every whale, a random number is considered. If , and depending on the magnitude of a vector , the method alternates between the circling phase –if – or the search of prey phase –when .
The circling phase is described by equations:
where
y
, with
is a vector with random components, and
is a vector whose components shrink linearly with
k from 2 to 0. These equations describe the global effect of having the best–positioned whale so far (i.e., with a lower
) to
warn her mates of how promising her current location is.
The exploratory phase, namely the search of preys, is controlled by equation:
but here
is given by:
On the other side, whenever
, the hunting phase is active, and the agents position is updated according to:
where yet another random number
controls whether the whale encircles her prey, or whether she
decides to approach the prey describing the famous spiral of decreasing radius.
| Algorithm 2 Whale Optimization Algorithm [16]. |
- 1:
Algoritmo WOA() - 2:
Random whale positions initialization . - 3:
Calculate the fitness of every whale, . - 4:
Identify the best whale . - 5:
while do - 6:
for do - 7:
Update , , , l, p y q. - 8:
if then - 9:
if then - 10:
- 11:
else if then - 12:
Choose a whale at random, , and use Equation ( 15). - 13:
end if - 14:
else - 15:
- 16:
end if - 17:
end for - 18:
Identify whales that wandered beyond region , and bring them back. - 19:
Recalculate the fitness for every whale, . - 20:
Update if a better solution was found. - 21:
end while - 22:
end Algoritmo
|
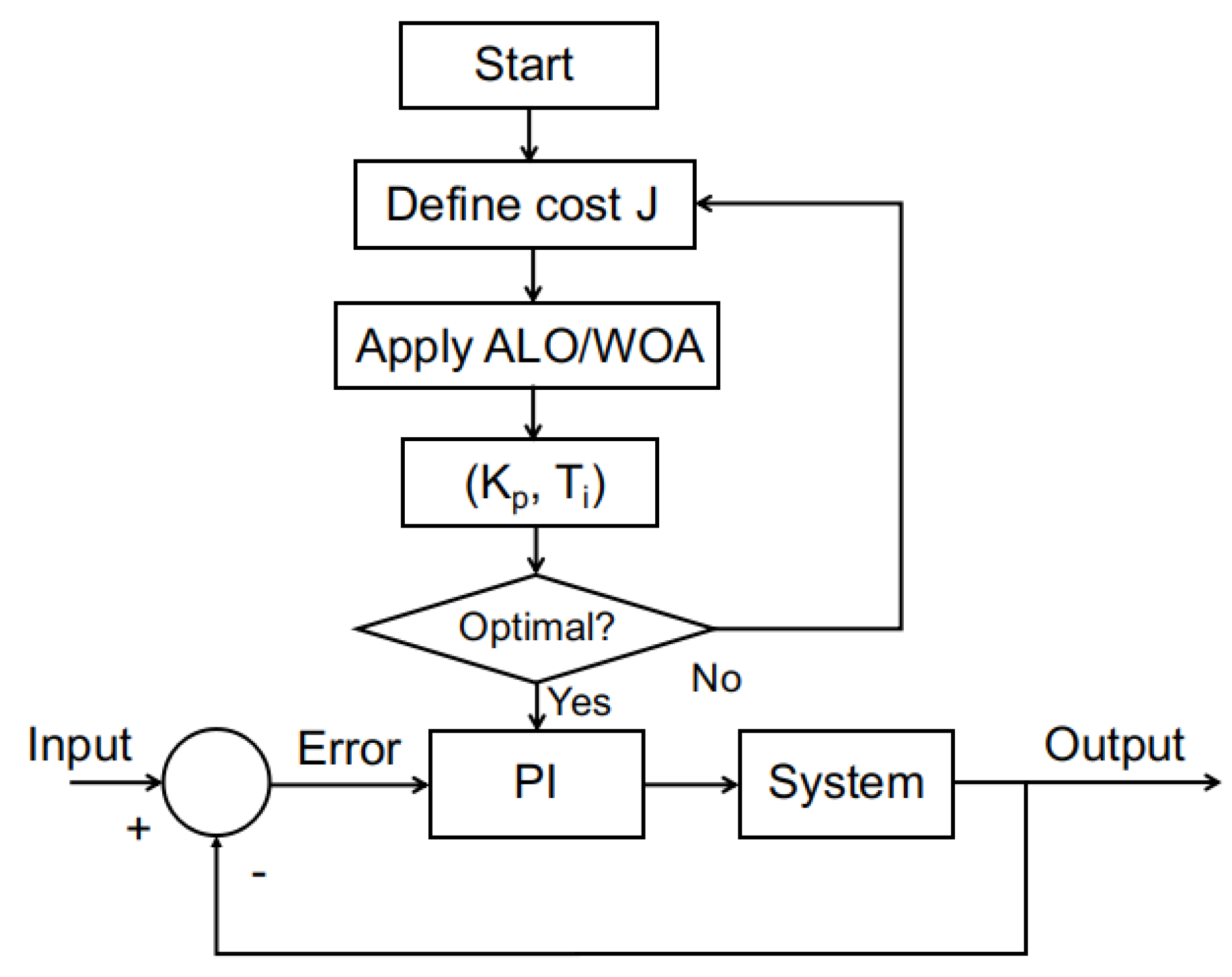
The methodology of the application of any of those metaheuristic optimization strategies to adjust the
PI controller parameters is shown in the flowchart of
Figure 5.
4. Conclusions and Future Works
In this work, the performance of two bio-inspired metaheuristic optimization algorithms, the Antlion Optimizer (or ALO) and the Whale Optimization Algorithm (or WOA), has been investigated. They have been applied to the adjustment of a conventional Proportional Integral (PI) controller for two systems of different complexity, the electromechanical Hoop and Ball (HB) system, and a wind turbine, generator, rectifier and load (WTGRL) system. Both techniques have been shown to present a robust and effective performance in the problems addressed.
The application to these systems is motivated by comparing both algorithms in two different scenarios. The Hoop and Ball (HB) system, allows a linearized description of it, while the wind turbine (WTGRL) system is an example of a complex non-linear dynamic system, of interest in the field of renewable energies, which cannot be adequately represented by a linear model.
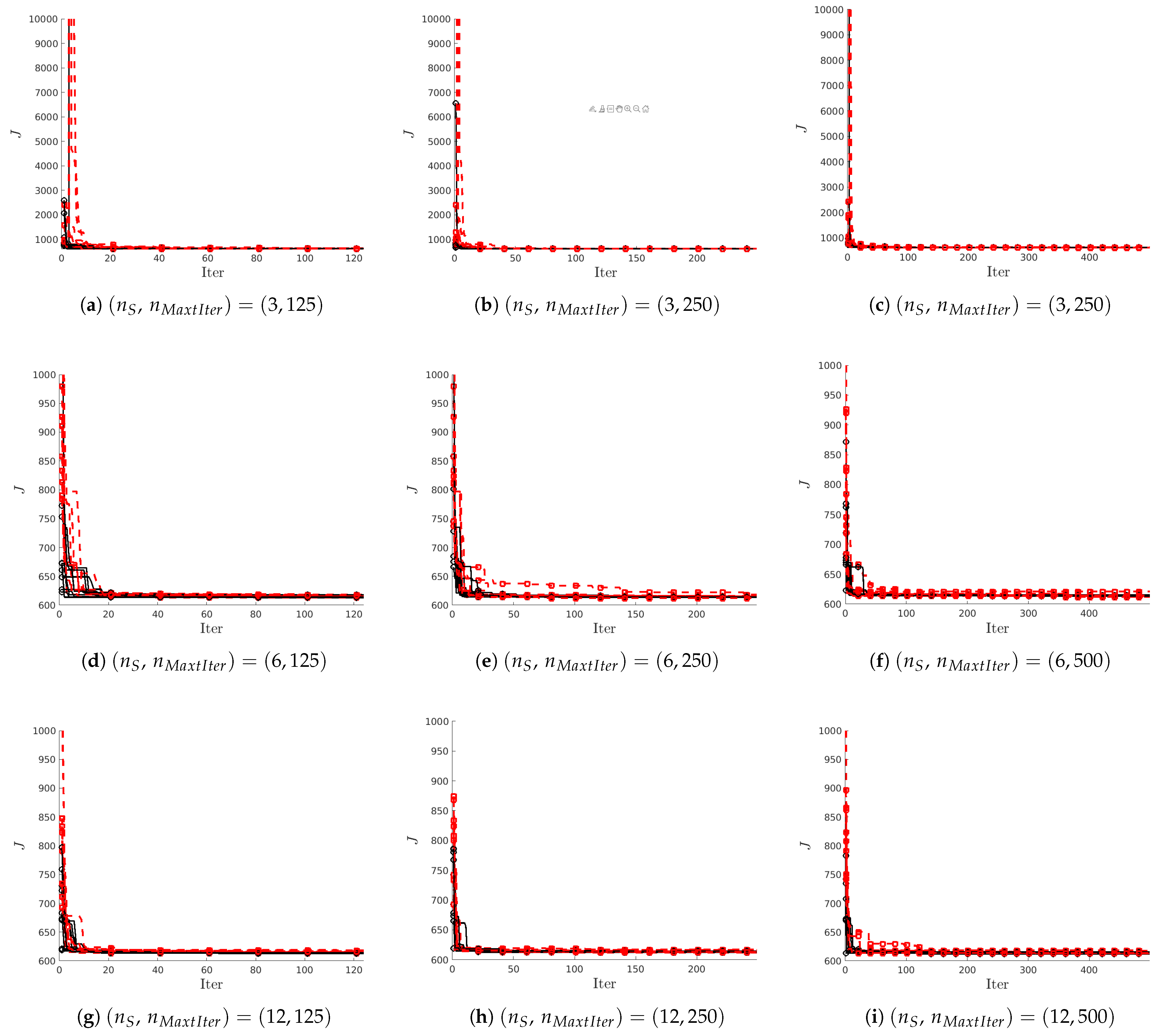
In evaluating the performance of the ALO and WOA techniques for tuning the PI controllers, a sensitivity analysis of the two most relevant parameters has been considered: the number of agents and the maximum number of iterations . The repeatability properties (i.e., the dependence on the seed for the random number generator) and the computational effort required have also been studied.
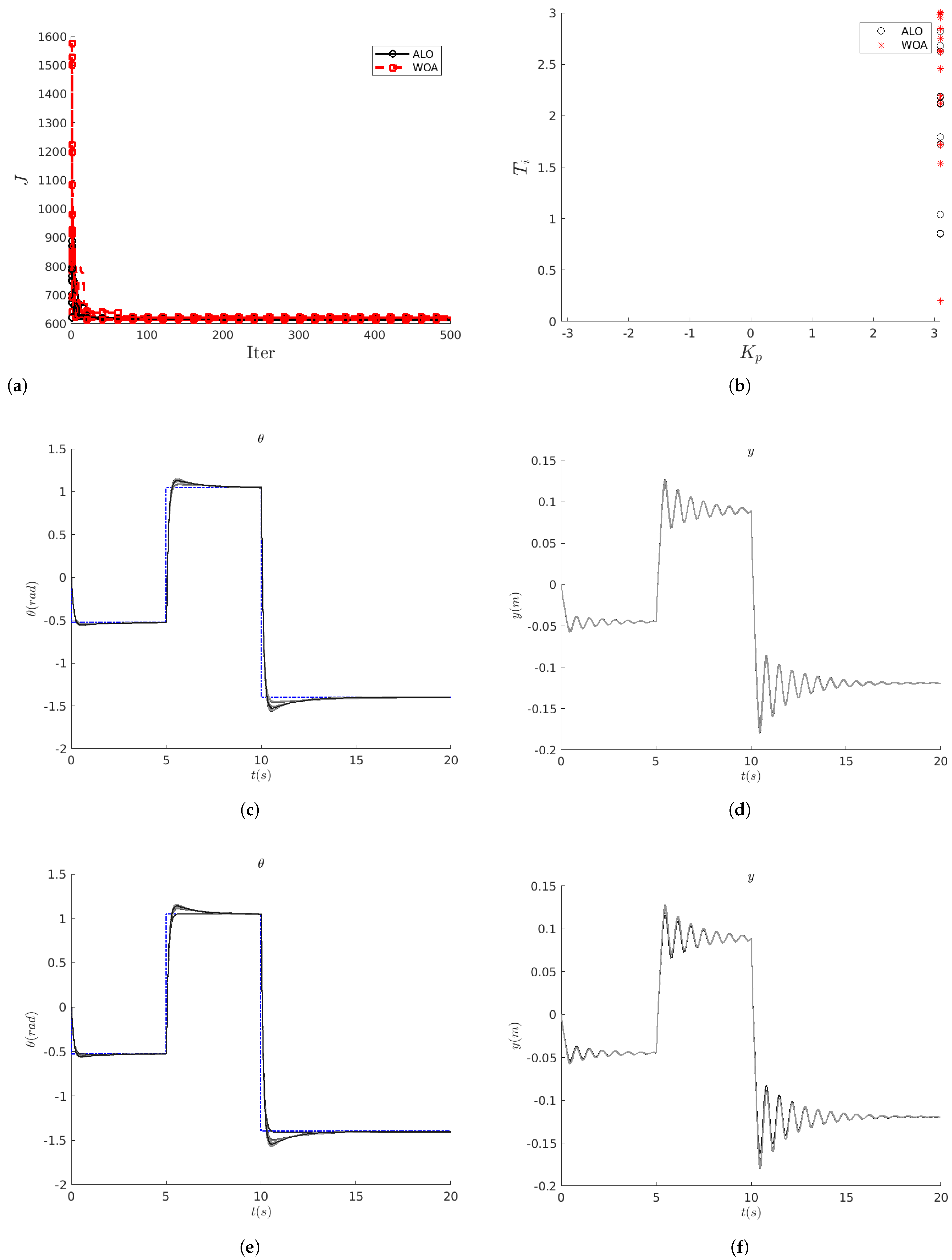
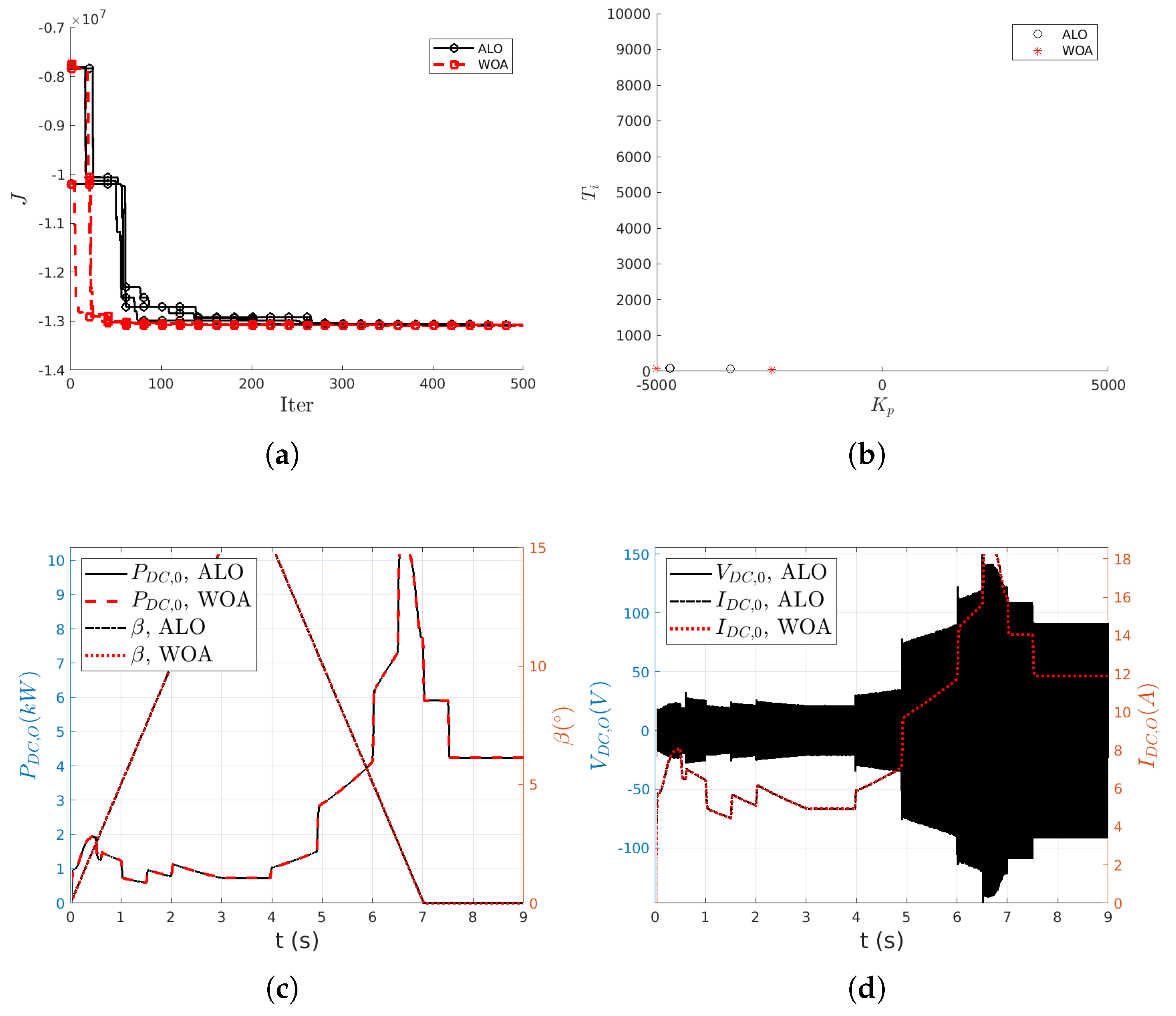
From the results obtained with both optimization techniques, it has been observed that both methods reach similar optimal values for the fitness (cost) function J. In general, the more agents and the more time they are allowed to explore the search space, the better solution, i.e., the lower the value of J, is found.
Regarding the computational time, it is observed that increases linearly with both the number of agents and the number of iterations with both optimization techniques.
On the other hand, the versatility of these techniques is shown since in some cases the ALO and/or WOA techniques have arrived at very different solutions, finding very different values of the parameters / of the controller that, however, give the same fitness function and very similar responses of the dynamic systems considered.
In general, the effectiveness and robustness demonstrated by both bio-inspired metaheuristic techniques, the Antlion Optimizer and the Whale Optimization Algorithm, shown in their application to various optimization problems, have been confirmed here for the tuning of a conventional controller for non-linear dynamical systems.
Another interesting consideration that can be deduced is that ALO/WOA methods should be used, whenever computationally affordable, by considering a sufficient number of runs, i.e., . This allows for considering the randomness of the initial conditions and the repeatability of the experiments and results obtained.
This last conclusion supports the need to have relatively simple models in terms of their simulation. This is one of the main limitations identified in the application of these techniques. Indeed, the faster a model is executed (the better the computational efficiency), the greater the number of search agents, iterations and realizations that can be performed and, therefore, the more complete the exploration of the solution space will be.
Other future work includes the possibility of applying these techniques ALO/WOA to other control problems in various fields. Specifically, and addressing another limitation of these metaheuristic methods, it would be desirable to have well-defined problems where these or other techniques could be compared. For this reason, in this work an effort has been made to establish the repeatability of the experiments.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}