
Multiagent-Based Control for Plug-and-Play Batteries in DC Microgrids with Infrastructure Compensation †



Abstract
:
1. Introduction
1.1. Background and Motivation
1.2. Statement of Problem
- Infrastructure influences are the major source of power losses in any electrical power system, whether it is generation, transmission, or distribution, and heterogeneous infrastructure around storage systems can have complex destabilizing effects if not compensated for.
- Infrastructure is a major influencer on the optimization and steadiness of the control process. Therefore, the proper compensation of DC infrastructure influences is a key factor in a successful control approach, and will be required for the balanced management of energy flow and long-term sustainability.
1.3. State-of-the-Art Summary
- A commitment is compulsory to all or part of the local infrastructure information.
- Any modification in the local infrastructure requires a mandatory adjustment of the control strategy parameters and factors.
- Any reality variation in the local infrastructure influence, such as temperature variations, unmonitored infrastructure flaws, and an update of the infrastructure length or conductance material, results in the unbalance of the control process and a defectiveness of the microgrid operation.
1.4. Contributions
- Accurate charge–discharge synchronization and the enhanced steadiness of the output voltage of the BESSs under 24 h variations in the load, different operational conditions regarding different batteries’ capacities and dissimilar initial states-of-charge (SOCs), infrastructure influences, and the decentralization of the control and communication.
- A qualified compensation to the DC influence of the infrastructure on the control process during charge/discharge scenarios, with no need for preknown information regarding the local infrastructure specifications, such as the transmission line lengths and conductance material, under a decentralized communication and control.
- Enhanced overcoming of circulating current/overloading for the participating BESSs under the above-presented influences of the real operation.
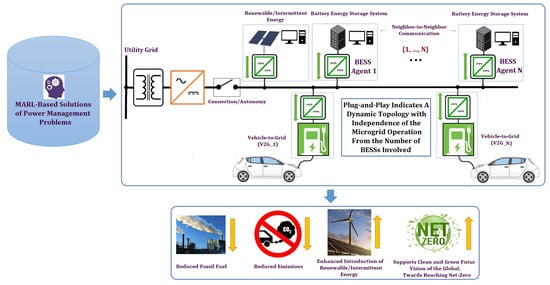
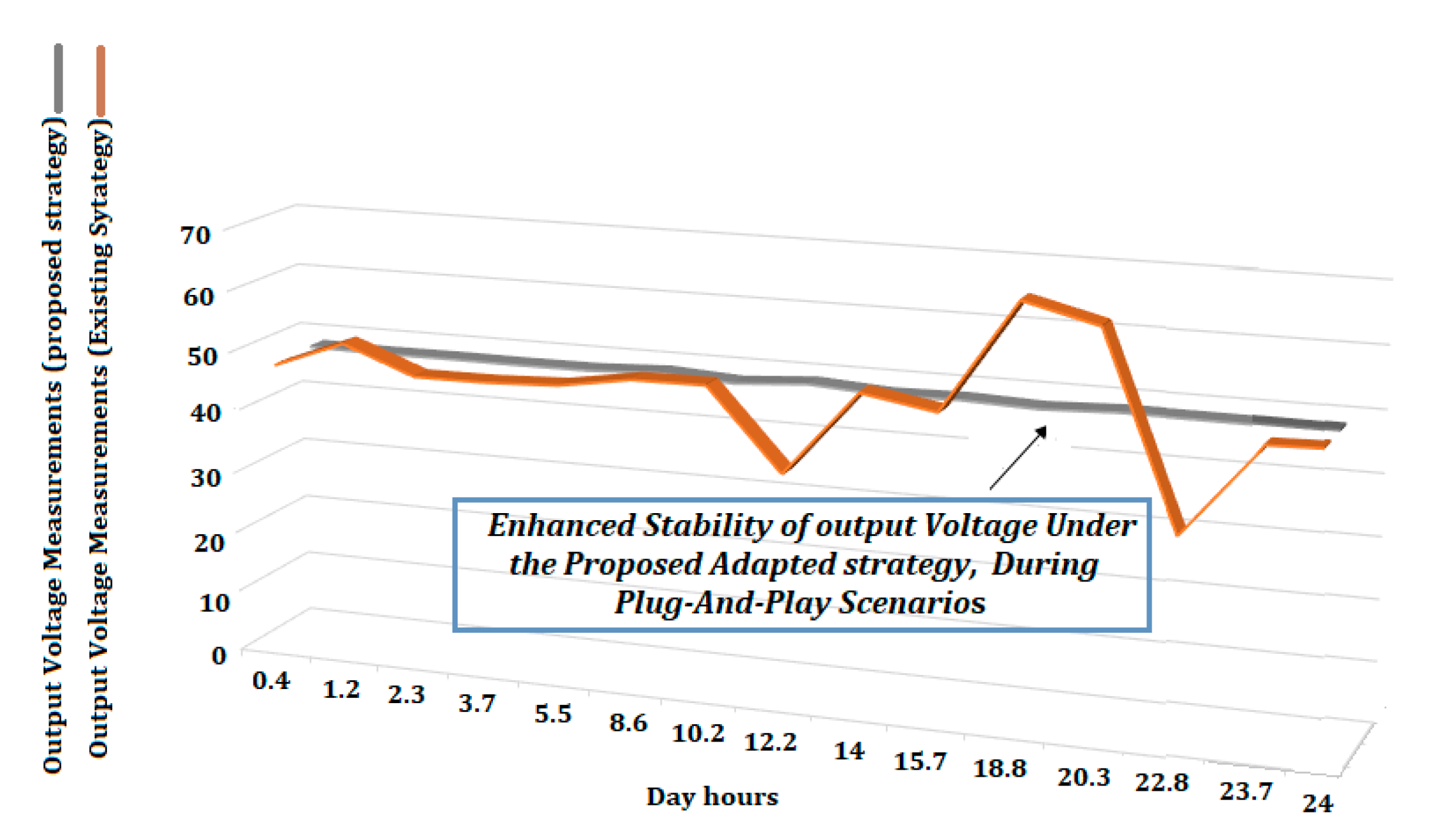
- A developed protective plug-and-play with no violation in the steadying of the control process, the steadying of the output voltage, and the precision of the charge–discharge synchronization. Hence, the independence of the microgrid operation from the number of participating BESSs.
1.5. Article Structure
2. Methodology
2.1. Approach and Theory of Control
2.1.1. Theory
2.1.2. Communication in MARL
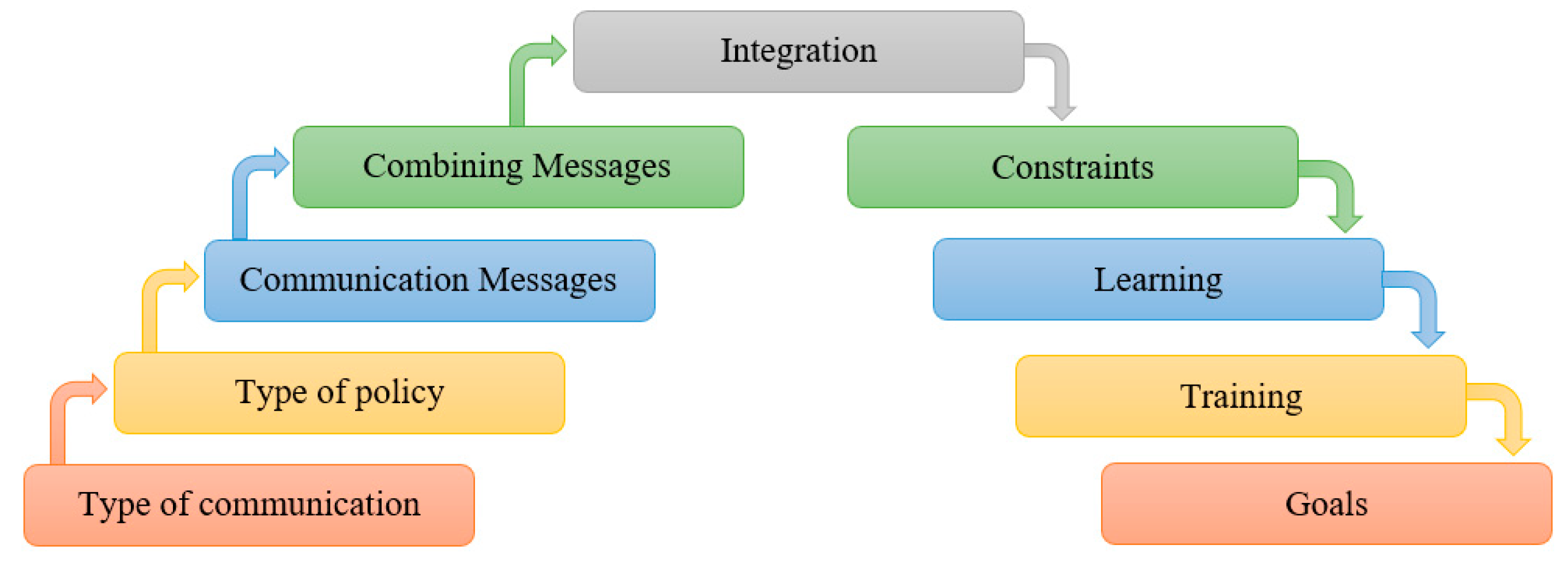
- Type of communication: This dimension identifies the communication topology for which agents intend to communicate with each other or send/receive immediate messages. In a multiagent system interacting in an environment, agents directly communicate with each other under different categories based on the communication topology. “Neighbor-to-Neighbor” learning allows communication only with the neighbors’ agents. This has several successful applications for fulfilling the intelligent decentralization of managing the power flow, particularly power storage, such as the multiagent primary–secondary strategy of managing the BESSs. While the communication is not limited to the neighbors’ agents in the “Other Agents Learning”, in the “proxy-based Comm-MARL”, communication is indirect between the agents, where a medium agent is provided to be viewed first by the agent.
- Type of policy: The policy in the Comm-MARL refers to the intentions and motives of making decisions to make communication and transfer messages (building a communication link). This can be either mandatory/predefined under specific requirements or learned based on the requirements of providing the best communication to enhance the learning of the environment.
- Communication messages: This signifies the piece of learning information that is decided to be transferred through the communication link. This might include a mandatory update of information and historical experiences/future intentions to enhance the learning. Furthermore, it can be sent directly between the agents or in multiple steps via the proxy agent.
- Combining messages: The immediately received multiple messages need to be combined before processing to the agent’s internal model. An independent decision by the agent is taken on how to combine the multiple messages if the proxy is missed. Otherwise, the combining role is the proxy’s responsibility.
- Integration: The integration of the combined messages to the agent’s learning is classified based on the part of the model involved in the “Policy-Level”, when the combined messages are imported to the policy model (which means the received messages are considered in the next intending action), the “Value-Level”, when the messages are received at the value function (the Q-table), and the “Policy-Value-Level”, when both levels are responsible for integrating the combined messages.
- Constraints: Real-world influences might establish limitations on communication in MARL, such as the cost of communication and noisy environments. Accordingly, a variety of constraints in communication were found, such as the limitation in the bandwidth, a change in the messages’ distribution due to noisy environments, and transmitted messages’ combinations through one medium.
- Learning: Learning in the Comm-MARL denotes the update, followed by communication protocols, communication policies, and the messages’ contents, based on the level of learning for the agent. Utilized feedback (or reward) exists in MARL, allowing for the backpropagation of the gradients between the agents to enrich the agents’ communication learning. In accordance, learning in communication can be classified based on the way to utilize the feedback, where the learning is “Reinforced” if another RL algorithm is employed, and “Differentiable” if the learning in communication is improved by the backpropagated gradients from the previous communicatees, with no further added RL algorithm.
- Training: The scheme of training in the Comm-MARL explains the dimensional determinations of utilizing the received experience. This can be classified as “Centralized-Learning” if the experiences are grouped in a central unit for the learning of all agents, and “Decentralized-Learning” if the experience is received individually by each agent through independent training.
- Goal: The aim of controlling the agents can be classed as “Cooperative” when the performance of the whole team is the point of focus, “Competitive” if the aim is only maximizing the local reward, and "Cooperative–Competitive" if a mixed aim of the previously explained aims is the requirement of the control.
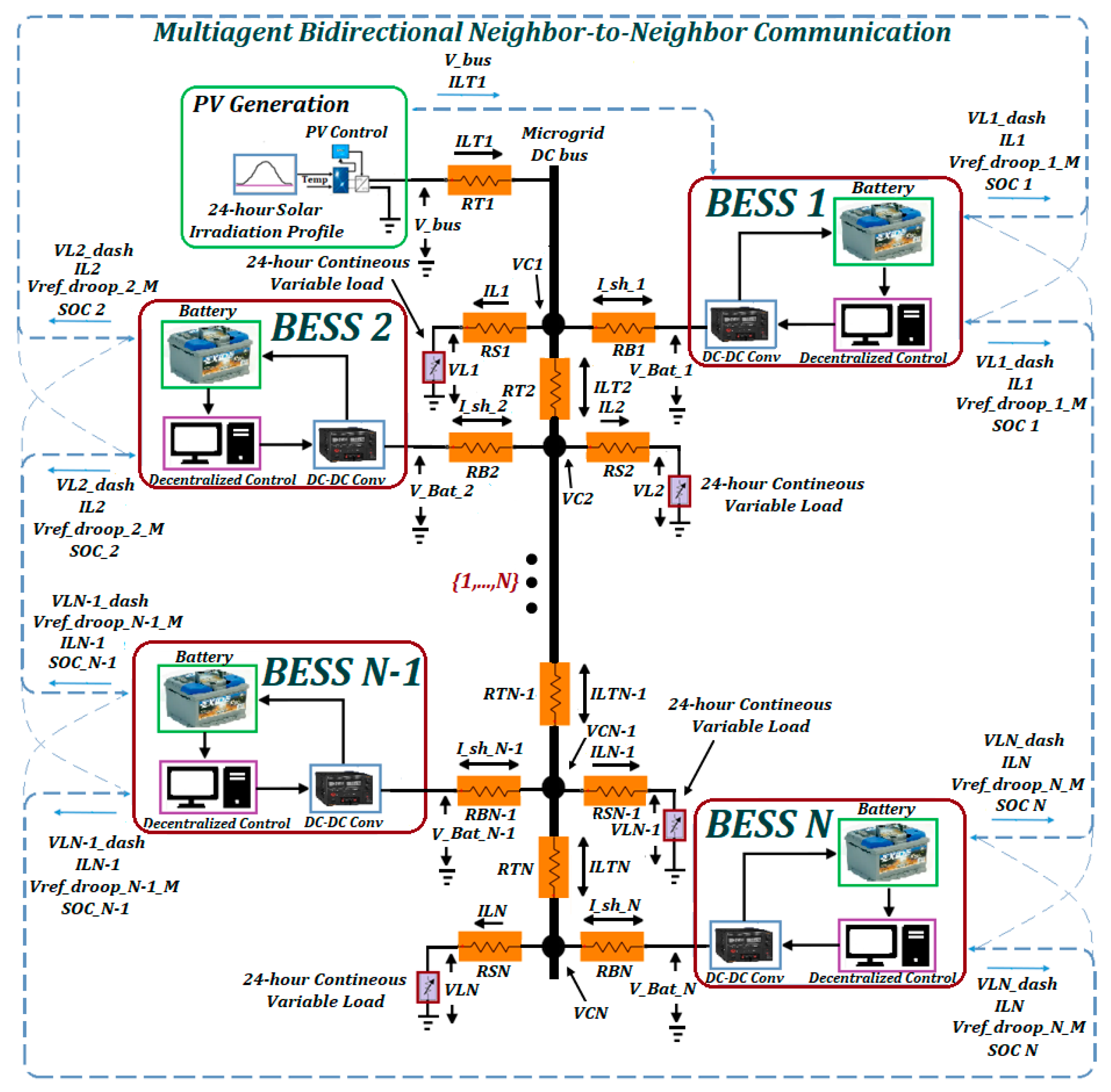
2.2. Principle of the Operation
2.2.1. The Compensation of the DC Infrastructure Influence on the Control
Infrastructure-Influence Compensation during Charging
- The voltage equilibrium of the microgrid DC bus is violated.
- The charge–discharge synchronization accuracy is disrupted.
- The balance of the BESSs’ participation level in load demand is compromised.
- The control process stabilization is negatively affected.
Infrastructure–Influence Compensation during Discharging
Infrastructure–Influence Compensation during Plug-and-Play
- Immediate real-time compensation of the DC infrastructural and operational influences on the control process, with no need for preknown information regarding the infrastructure details. A detailed explanation is presented in the below demonstration of the proposed control stages. Hence, the optimization, reliability, and robustness of the control are accomplished to verify the mandatory power-storage management of the microgrid in real operation.
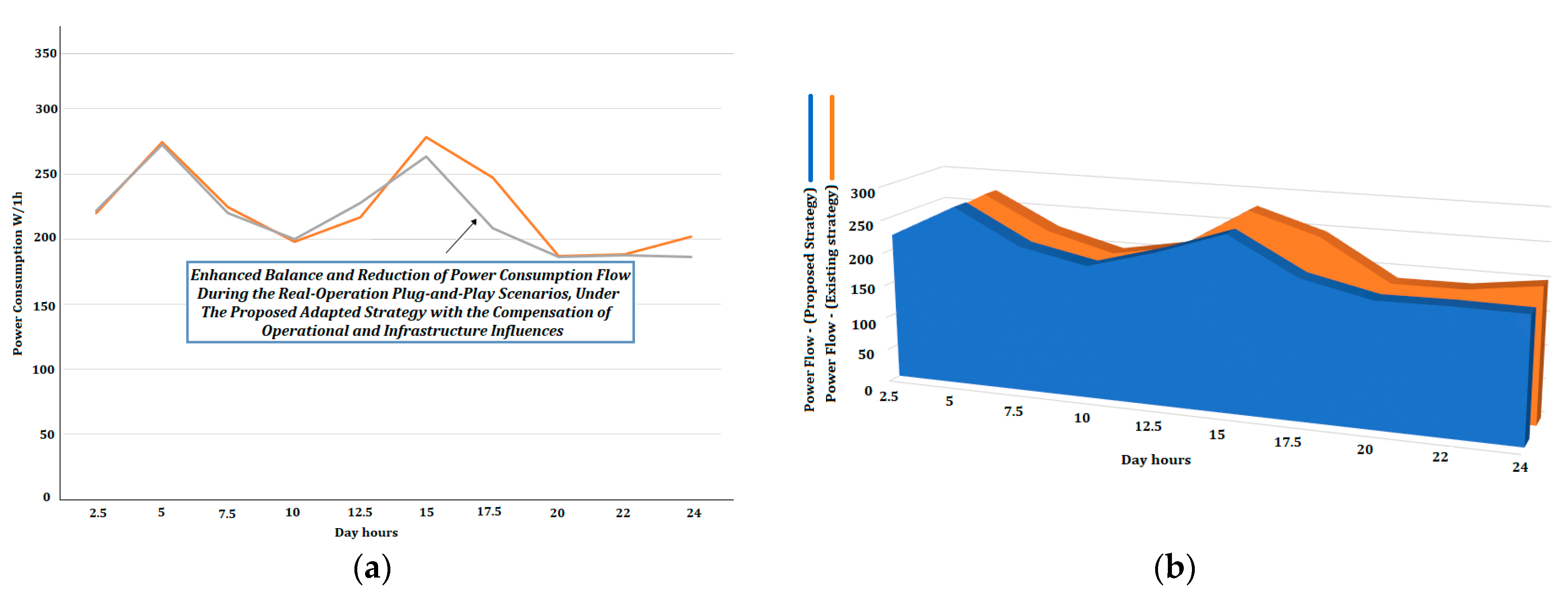
- Given the DC impact of most of the environmental and infrastructural influence, and many of the accidental and operational faults in DC networks are violations of the current balance, the proposed adapted control strategy, with the suggested compensation of the infrastructure influence, supports an active, robust, reliable, and sustainable balanced power-storage flow in uncertain and inconstant environments with a large probability of load variations.
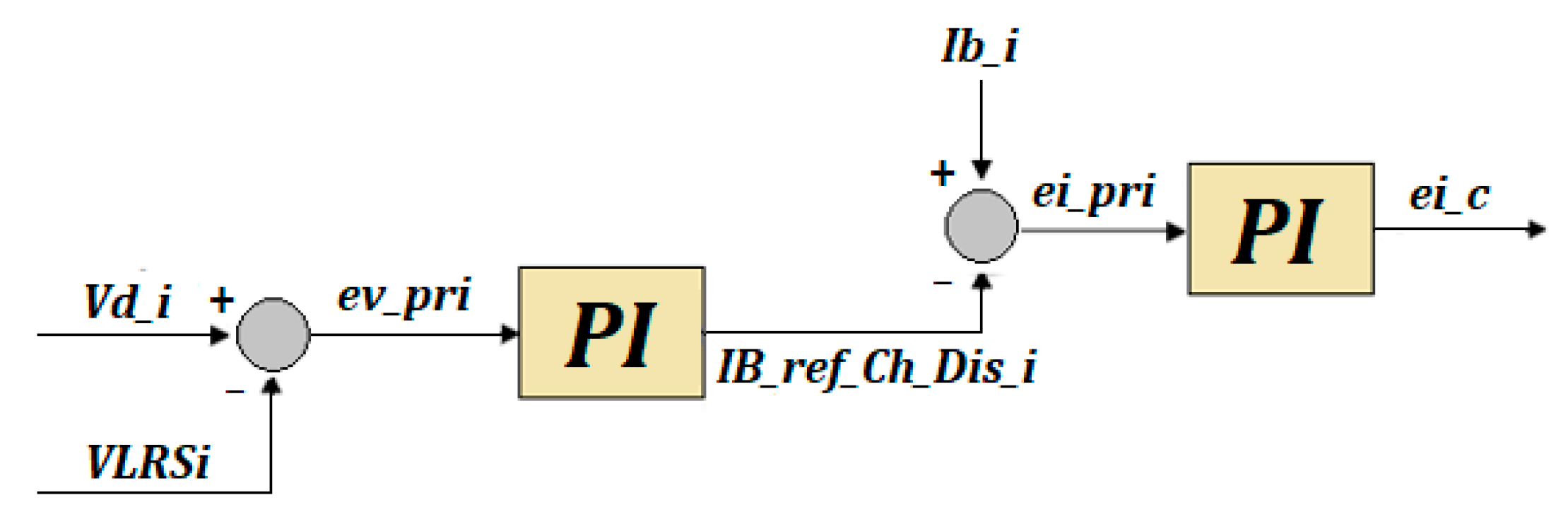
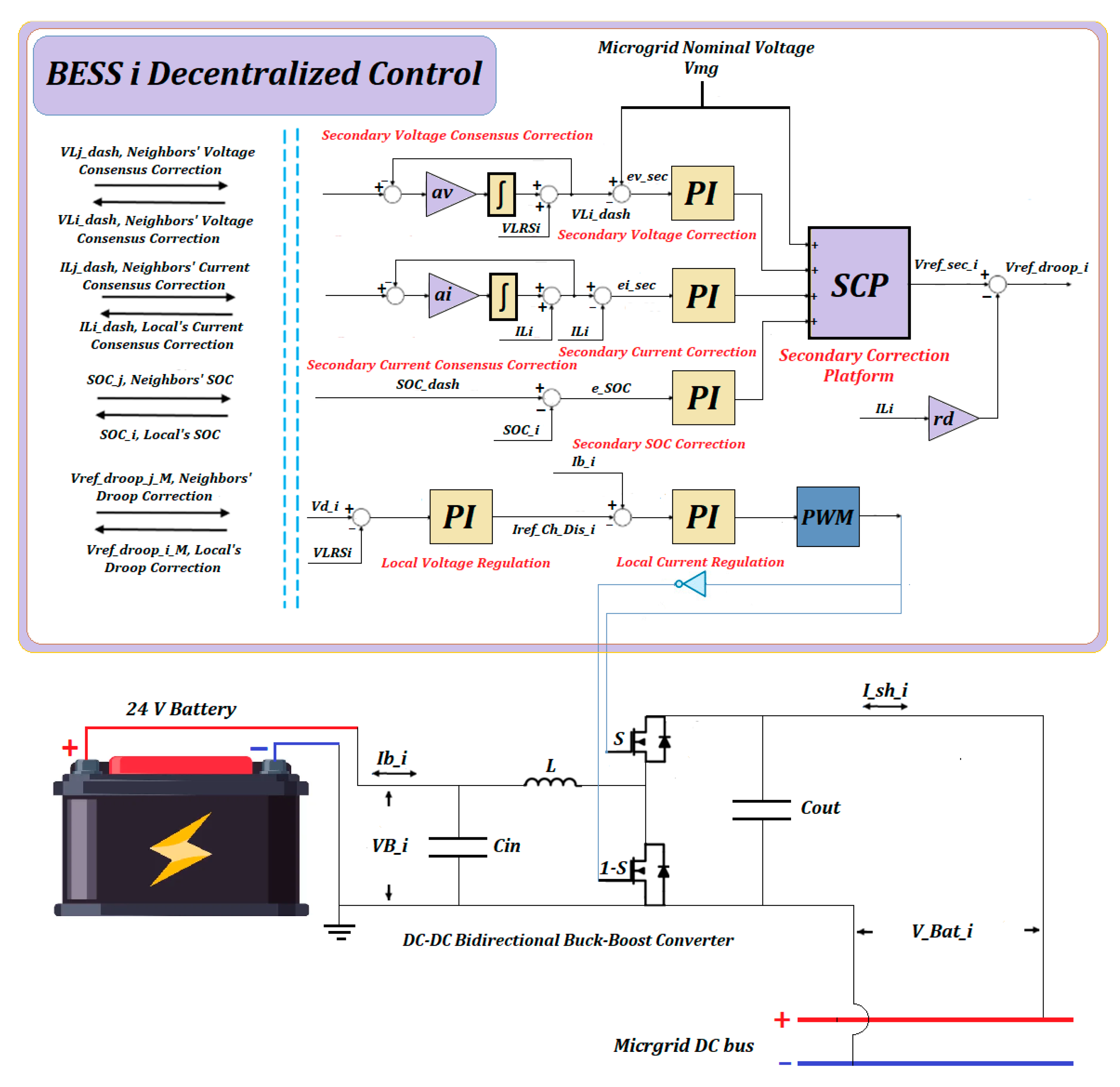
2.2.2. The Decentralized Control—Primary Level
2.2.3. The Decentralized Secondary Correction
The Decentralized Voltage Correction—Secondary Level
The Decentralized Secondary Correction of the Participation Current
The Secondary Correction of the SOC Synchronization
2.2.4. The Decentralized Secondary Correction Based on Consensus
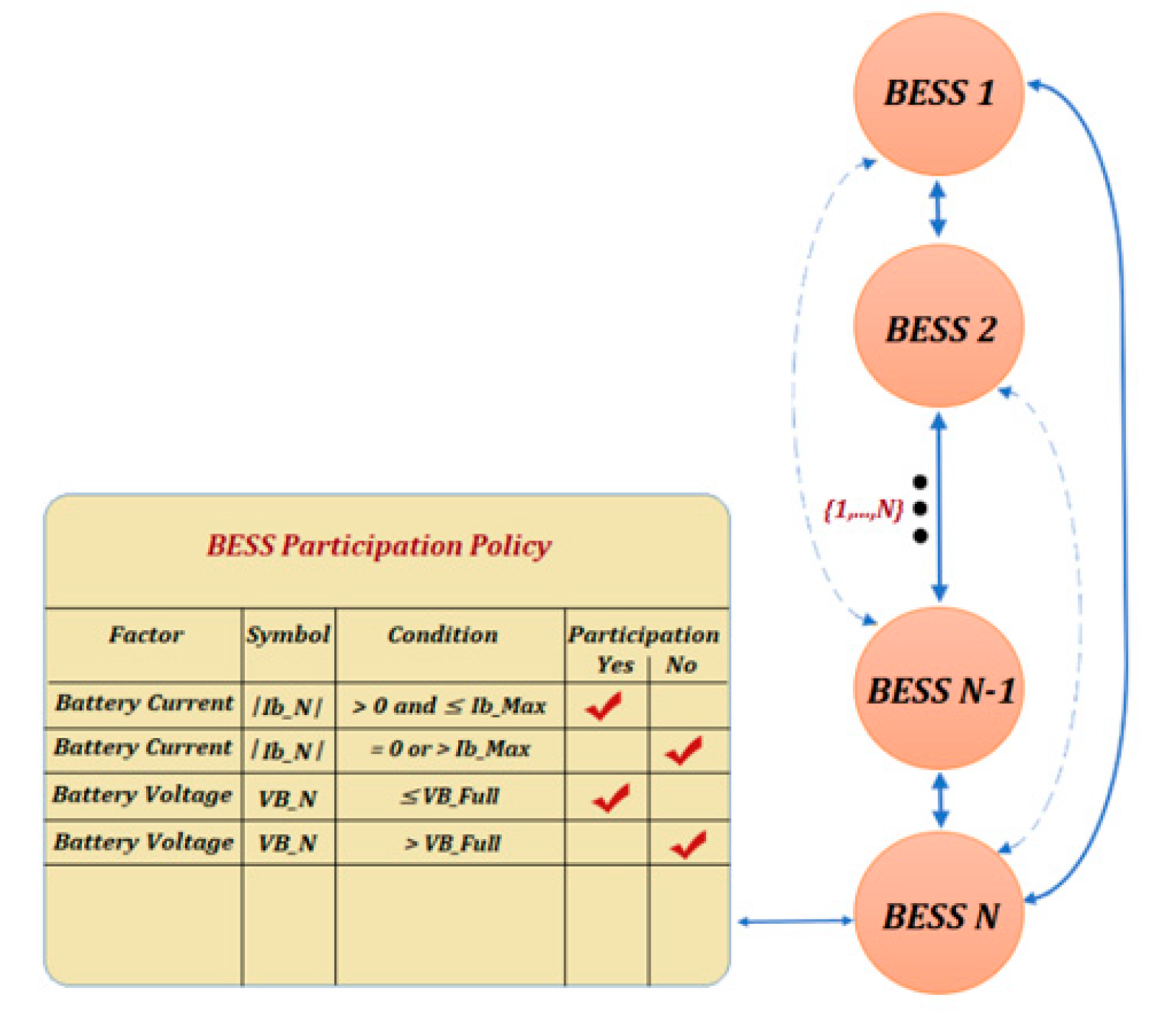
2.2.5. Plug-and-Play Insertions and the Removals of the BESSs
- Participating BESSs can end the participation individually at any time, and for an unknown time period, with no effect on the steadiness of the control strategy and the precision of the charge–discharge synchronization for the participating BESSs.
- The enhanced protection of the power and control infrastructure against a faulty out-of-control increase in the batteries’ voltages and currents higher than the nominal ratings. Hence, this supports enhanced system protection and healthier long-life batteries.
- Since balanced plug-and-play can be verified on each BESS, independence is verified in the power-flow balance from the number of participating BESSs in the microgrid.
3. Results and Discussions
3.1. Case 1: The Suggested Adaptjve Strategy—Three BESS Agents in the Microgrid
- The successful multiagent-based balance of the participation level in the load-demand implementation.
- The enhanced precision of the charge–discharge synchronization for the participating BESSs in the microgrid under real operational influences.
- The good compensation of the DC infrastructural/operational influence on the control strategy. Thus, the balance of the control process was improved under the most expected real-world operations.
- The defilement of currents’ balance due to the DC infrastructure/operational influences.
- The disparity of the load participation by the heterogeneous batteries (different batteries’ capacities/initial SOCs).
- The impact of excessive continuous load variation.
- The violation in the charge–discharge synchronization accuracy.
3.2. Case 2: The Verification under the Plug-and-Play Operations
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| V2G | Vehicle-to-grid charging |
| MARL | Multiagent reinforcement learning |
| AI | Artificial intelligence |
| Near-optimal | Close to the best possible, asymptotically optimal |
| MARL agent’s action | |
| MARL agent’s status | |
| MARL agent’s reward | |
| ANN | Artificial neural network |
| ML | Machine learning |
| Comm-MARL | Agents’ communication in MARL |
| MDP | Markov decision process |
| MG | Markov game |
| S | Set of states in the agent |
| Qi | Agent observations |
| Ri | Agent reward |
| γ | Learning discounting factor |
| Ai | Agent actions |
| Encoded message | |
| Scheduled graph | |
| fshed | Scheduling function |
| fmp | Processing function |
| Nm | Number of encoded messages |
| Lg | Number of scheduled graphs |
| BESS | Battery-energy-storage system |
| BESSs | Battery-energy-storage systems |
| SOC | State-of-charge |
| SOC_i | Local measured state-of-charge |
| Voltage consensus correction/ith BESS | |
| Current consensus correction/ith BESS | |
| DC infrastructure influence at load branch/ith microgrid region | |
| DC infrastructure influence at BESS branch/ith microgrid region | |
| DC infrastructure influence at the connection/ith microgrid region | |
| N | Number of BESSs in the microgrid |
| HiL | Hardware-in-the-loop |
| PVs | Photovoltaics |
| BESS N − 1 | Battery-energy-storage system/N − 1th region |
| BESSN | Battery-energy-storage system/Nth region |
| Microgrid bus voltage | |
| Node voltage/Nth microgrid region | |
| Node voltage/N − 1th microgrid region | |
| The DC infrastructure influence at the connection/Nth BESS | |
| The current at transmission connection/Nth BESS | |
| The voltage of DC impact at the load branch/Nth microgrid region | |
| The voltage of DC impact at the BESS branch/Nth microgrid region | |
| The voltage of DC impact at the connection/Nth microgrid region | |
| Real-time measurement of the output voltage/Nth microgrid region | |
| Voltage difference between the VCN and VLN/Nth microgrid region | |
| Immediate real-time influence-compensation/Nth microgrid region | |
| Immediate real-time BESS voltage/Nth BESS | |
| Battery current/Nth BESS | |
| EV | Electric vehicle |
| EVs | Electric vehicles |
| VLRSi | Real-time locally measured reality-influencing output voltage |
| PWM | Power-width modulation |
| Real-time measurement of the output voltage/ith BESS | |
| Microgrid nominal voltage | |
| Real-time current reference of the local control/ith BESS | |
| Error of the local voltage control/ith BESS | |
| Local control proportional voltage gain/ith BESS | |
| Local control integral voltage gain/ith BESS | |
| Local control proportional current gain/ith BESS | |
| Local control integral current grain/ith BESS | |
| Adapted real-time local reference/ith BESS | |
| Error of the local current control/ith BESS | |
| Local control current action | |
| Droop coefficient/ith BESS | |
| Real-time droop reference | |
| Real-time neighbors’ droop correction of load demand/ith BESS | |
| Real-time local’s droop correction of load demand/ith BESS | |
| Real-time secondary correction reference/ith BESS | |
| Secondary correction of the output voltage/ith BESS | |
| Secondary correction of the participation current/ith BESS | |
| Secondary correction of the SOC synchronization | |
| Error of the secondary voltage correction/ith BESS | |
| Secondary voltage correction proportional gain/ith BESS | |
| Secondary voltage correction integral gain/ith BESS | |
| Error of the secondary current correction/ith BESS | |
| Secondary-current-correction proportional gain/ith BESS | |
| Secondary-current-correction integral gain/ith BESS | |
| Real-time measured participation current/ith BESS | |
| Error of the secondary SOC correction/ith BESS | |
| Average neighbors’ SOC/ith BESS | |
| Secondary SOC correction proportional gain/ith BESS | |
| Secondary SOC correction integral gain/ith BESS | |
| Number of the neighbors’ BESSs/ith BESS | |
| Voltage consensus gain | |
| Current consensus | |
| Battery-rated current | |
| Battery voltage/Nth BESS | |
| Battery full charge (maximum) voltage | |
| CV | Constant voltage charging |
| SoH | State-of-health |
| Convergence time |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hours of the Day | Output-Voltage Measurements/Existing Strategy (V) | Output-Voltage Measurements/Proposed Strategy (V) |
|---|---|---|
| 2.1 (convergence point) | 47.99 | 48.01 |
| 5 | 47.6 | 47.9 |
| 10 | 48.3 | 48.04 |
| 15 | 47.8 | 48.03 |
| 16.3 | 47.1 | 47.95 |
| 17 | 46.2 | 47.93 |
| 17.5 | 45.5 | 47.8 |
| 18.3 | 47.3 | 47.98 |
| 20.4 | 47.5 | 48.01 |
| 22.5 | 47.8 | 47.99 |
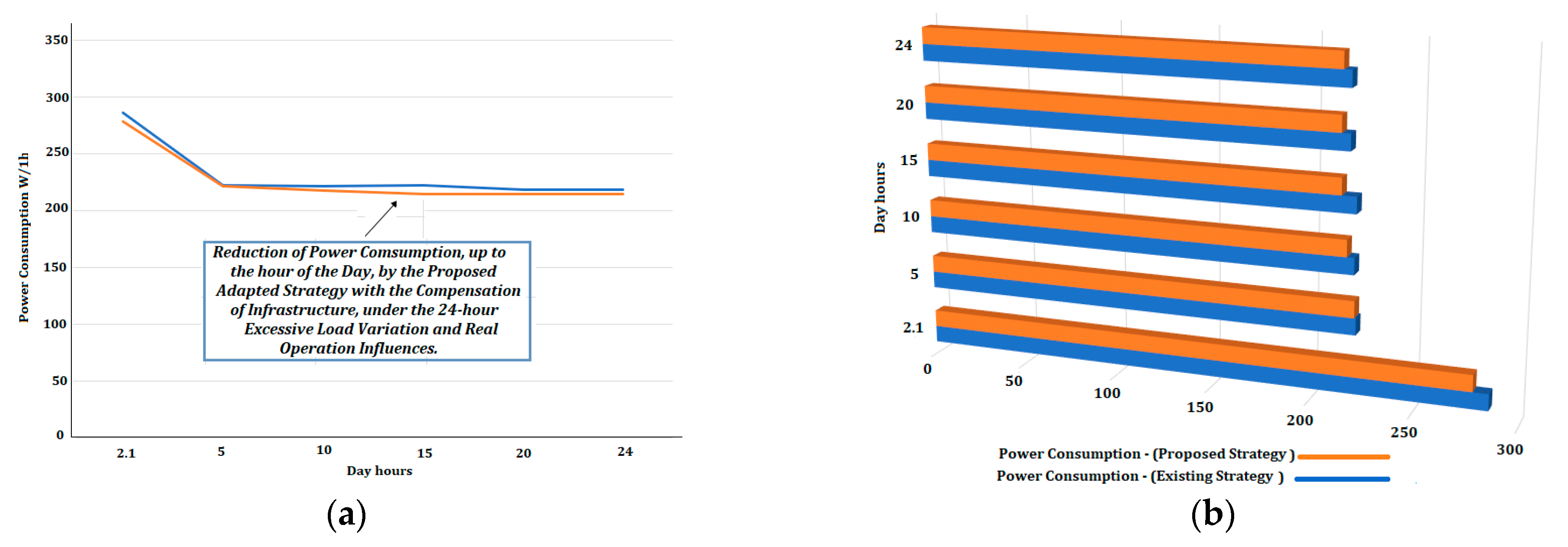
| Hours of the Day | Total Power Consumption (W/1 h), Existing Strategy | Total Power Consumption (W/1 h) Proposed Design |
|---|---|---|
| 2.1 (convergence point) | 286.19 | 278.57 |
| 5 | 222.6 | 221.8 |
| 10 | 221.4 | 217.7 |
| 15 | 222.066 | 214.8 |
| 20 | 218.7 | 214.35 |
| 24 | 218.833 | 214.8333 |
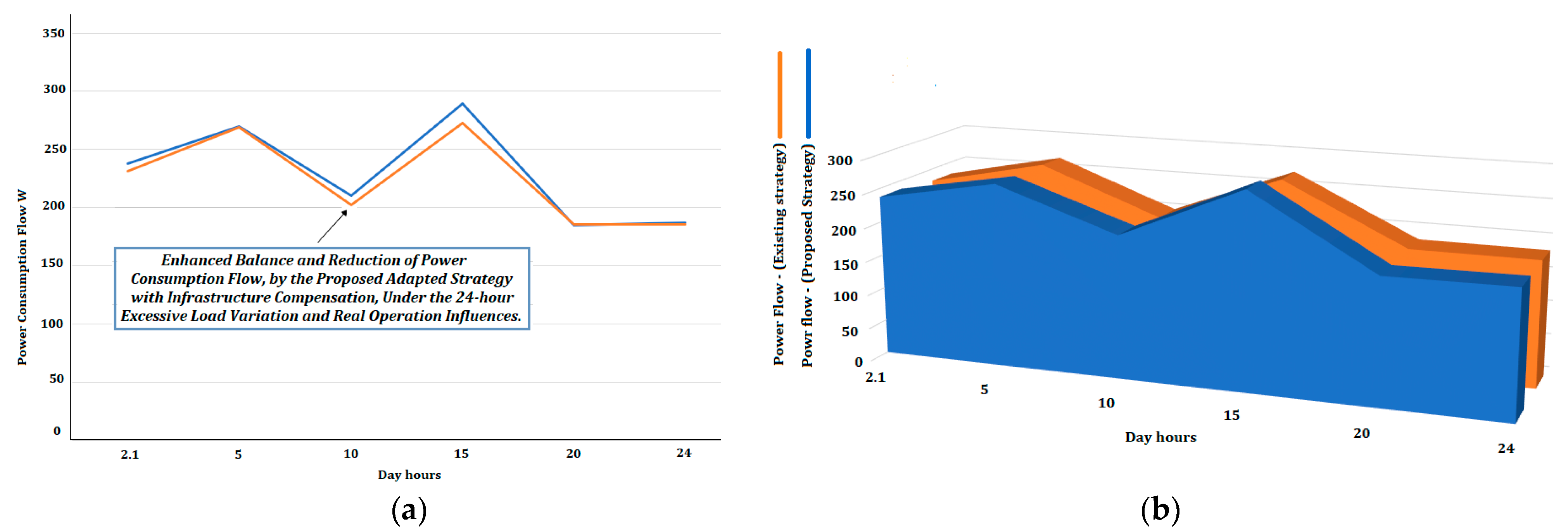
| Hours of the Day | Power-Flow Measurements (W), Existing Strategy | Power-Flow Measurements (W), Proposed Strategy |
|---|---|---|
| 2.1 (convergence point) | 237.68 | 231.69 |
| 5 | 269.95 | 268.88 |
| 10 | 210.32 | 202.27 |
| 15 | 289.36 | 272.68 |
| 20 | 185.25 | 185.95 |
| 24 | 187.02 | 185.64 |
Appendix B
| Period BESSS | Off-Participation Time Existing/Proposed | Participation Time Existing/Proposed | Convergence Time Existing/Proposed |
|---|---|---|---|
| P1 BESS 3 | a1, 0.4/0.4 | b1, 0.9/0.8 | c1, 2.2/2 |
| P2 BESS 2 | a2, 1.2/1.2 | b2, 2.2/2 | c2, 3.1/2.9 |
| P3 BESS 1 | a3, 2.3, 2.3 | b3, 3/2.9 | c3, 3.5/3.3 |
| P4 BESS 3 | a4, 3.7/3.7 | b4, 4.5/4.5 | c4, 4.8/4.6 |
| P5 BESS 2 | a5, 5.5/5.5 | b5, 6.7/6.6 | c5, 7.1/6.9 |
| P6 BESS 1 | a6, 8.6/8.6 | b6, 9.3/9.3 | c6, 9.8/9.6 |
| P7 BESS 3 | a7, 10.2/10.2 | b7, 11/10.97 | c7, 11.6/11.4 |
| P8 BESS 2 | a8, 12.2/12.1 | b8, 12.9/12.83 | c8, 13.4/13.2 |
| P9 BESS 1 | a9, 14/14 | b9, 14.6/14.6 | c8, 15/14.9 |
| P10 BESS 3 | a10, 15.7/15.7 | b10, 16.4/16.4 | c10, 20.2/17.5 |
| P11 BESS 2 | a11, 18.8/18.8 | b11, 19.6/19.6 | c11, 20.1/19.8 |
| P12 BESS 1 | a12, 21.7/21.7 | b12, 22.5/22.5 | c12, 23.6/23.4 |
| Hours of the Day | Output-Voltage Measurement/Existing Strategy (V) | Output-Voltage Measurement/Proposed Strategy (V) |
|---|---|---|
| 0.4 | 47.6 | 48.1 |
| 1.2 | 52.1 | 47.9 |
| 2.3 | 47.65 | 47.96 |
| 3.7 | 47.7 | 47.9 |
| 5.5 | 48.2 | 47.95 |
| 8.6 | 50.1 | 48.5 |
| 10.2 | 50.2 | 47.8 |
| 12.2 | 37.2 | 48.65 |
| 14 | 51.12 | 47.9 |
| 15.7 | 49 | 48.12 |
| 18.8 | 67 | 47.7 |
| 20.3 | 64 | 48.2 |
| 22.8 | 33.13 | 48.17 |
| 23.7 | 47.6 | 48.1 |
| 24 | 47.9 | 48.02 |
| Hours of the Day | Power Consumption (W/1 h), Existing Strategy | Power Consumption (W/1 h), Proposed Strategy |
|---|---|---|
| 2.5 | 222.23 | 222.68 |
| 5 | 223 | 222.8 |
| 7.5 | 223.6 | 221.6 |
| 10 | 222 | 218.7 |
| 12.5 | 220.48 | 215.76 |
| 15 | 221.533 | 215.466 |
| 17.5 | 223.0857 | 215.14 |
| 20 | 220.15 | 214.65 |
| 22 | 222.545 | 215.363 |
| 24 | 222.958 | 215 |
| Hours of the Day | Power-Flow Measurements (W), Existing Strategy | Power-Flow Measurements (W), Proposed Strategy |
|---|---|---|
| 2.5 | 219.87 | 222.11 |
| 5 | 274.06 | 272.45 |
| 7.5 | 224.22 | 220.06 |
| 10 | 198.04 | 199.78 |
| 12.5 | 216.51 | 228.03 |
| 15 | 278.2 | 263.09 |
| 17.5 | 247.24 | 208.48 |
| 20 | 187.19 | 186.01 |
| 22 | 188.01 | 187.51 |
| 24 | 202.09 | 186.32 |
References
- Short, M.; Crosbie, T.; Al-Greer, M. Future Smart Grid Systems; MDPI-Multidisciplinary Digital Publishing Institute: Basel, Switzerland, 2021; ISBN 978-3-0365-1335-5. [Google Scholar]
- Khosravi, N.; Baghbanzadeh, R.; Oubelaid, A.; Tostado-Véliz, M.; Bajaj, M.; Hekss, Z.; Echalih, S.; Belkhier, Y.; Abou Houran, M.; Aboras, K.M. A novel control approach to improve the stability of hybrid AC/DC microgrids. Appl. Energy 2023, 344, 121261. [Google Scholar] [CrossRef]
- Altin, N.; Eyimaya, S.E.; Nasiri, A. Multi-Agent-Based Controller for Microgrids: An Overview and Case Study. Energies 2023, 16, 2445. [Google Scholar] [CrossRef]
- Saha, D.; Bazmohammadi, N.; Vasquez, J.C.; Guerrero, J.M. Multiple microgrids: A review of architectures and operation and control strategies. Energies 2023, 16, 600. [Google Scholar] [CrossRef]
- Niri, M.F.; Dinh, T.Q.; Yu, T.F.; Marco, J.; Bui, T.M.N. State of power prediction for lithium-ion batteries in electric vehicles via wavelet-Markov load analysis. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5833–5848. [Google Scholar] [CrossRef]
- Bui, T.M.; Sheikh, M.; Dinh, T.Q.; Gupta, A.; Widanalage, D.W.; Marco, J. A study of reduced battery degradation through state-of-charge pre-conditioning for vehicle-to-grid operations. IEEE Access 2021, 9, 155871–155896. [Google Scholar] [CrossRef]
- Zhang, J.; Jia, R.; Yang, H.; Dong, K. Does electric vehicle promotion in the public sector contribute to urban transport carbon emissions reduction? Transp. Policy 2022, 125, 151–163. [Google Scholar] [CrossRef]
- Qian, J.; Jiang, Y.; Liu, X.; Wang, Q.; Wang, T.; Shi, Y.; Chen, W. Federated Reinforcement Learning for Electric Vehicles Charging Control on Distribution Networks. IEEE Internet Things J. 2023, 14. [Google Scholar] [CrossRef]
- Al-Saadi, M.; Al-Greer, M.; Short, M. Strategies for controlling microgrid networks with energy storage systems: A review. Energies 2021, 14, 7234. [Google Scholar] [CrossRef]
- Al-Saadi, M.; Al-Greer, M.; Short, M. Reinforcement learning-based intelligent control strategies for optimal power management in advanced power distribution systems: A survey. Energies 2023, 16, 1608. [Google Scholar] [CrossRef]
- Kang, H.; Jung, S.; Lee, M.; Hong, T. How to better share energy towards a carbon-neutral city? A review on application strategies of battery energy storage system in city. Renew. Sustain. Energy Rev. 2022, 157, 112113. [Google Scholar] [CrossRef]
- Dong, J.; Yassine, A.; Armitage, A.; Hossain, M.S. Multi-Agent Reinforcement Learning for Intelligent V2G Integration in Future Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2023, 24, 15974–15983. [Google Scholar] [CrossRef]
- Huang, Y.; Li, G.; Chen, C.; Bian, Y.; Qian, T.; Bie, Z. Resilient distribution networks by microgrid formation using deep reinforcement learning. IEEE Trans. Smart Grid 2022, 13, 4918–4930. [Google Scholar] [CrossRef]
- Morstyn, T.; Hredzak, B.; Agelidis, V.G. Cooperative multi-agent control of heterogeneous storage devices distributed in a DC microgrid. IEEE Trans. Power Syst. 2015, 31, 2974–2986. [Google Scholar] [CrossRef]
- Al-Saadi, M.; Short, M. Multiagent Power Flow Control for Plug-and-Play Battery Energy Storage Systems in DC Microgrids. In Proceedings of the 2023 58th International Universities Power Engineering Conference (UPEC), Dublin, Ireland, 30 August–1 September 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Rafaq, M.S.; Basit, B.A.; Mohammed SA, Q.; Jung, J.W. A comprehensive state-of-the-art review of power conditioning systems for energy storage systems: Topology and control applications in power systems. IET Renew. Power Gener. 2022, 16, 1971–1991. [Google Scholar] [CrossRef]
- Smolenski, R.; Szczesniak, P.; Drozdz, W.; Kasperski, L. Advanced metering infrastructure and energy storage for location and mitigation of power quality disturbances in the utility grid with high penetration of renewables. Renew. Sustain. Energy Rev. 2022, 157, 111988. [Google Scholar] [CrossRef]
- Yu, H.; Niu, S.; Shang, Y.; Shao, Z.; Jia, Y.; Jian, L. Electric vehicles integration and vehicle-to-grid operation in active distribution grids: A comprehensive review on power architectures, grid connection standards and typical applications. Renew. Sustain. Energy Rev. 2022, 168, 112812. [Google Scholar] [CrossRef]
- Ma, J.; Yuan, L.; Zhao, Z.; He, F. Transmission loss optimization-based optimal power flow strategy by hierarchical control for DC microgrids. IEEE Trans. Power Electron. 2016, 32, 1952–1963. [Google Scholar] [CrossRef]
- Jiang, Y.; Yang, Y.; Tan, S.-C.; Hui, S.Y.R. Power loss minimization of parallel-connected distributed energy resources in DC microgrids using a distributed gradient algorithm-based hierarchical control. IEEE Trans. Smart Grid 2022, 13, 4538–4550. [Google Scholar] [CrossRef]
- Aluko, A.; Buraimoh, E.; Oni, O.E.; Davidson, I.E. Advanced distributed cooperative secondary control of Islanded DC Microgrids. Energies 2022, 15, 3988. [Google Scholar] [CrossRef]
- Mohamed, M.A.; Rashed, M.; Lang, X.; Atkin, J.; Yeoh, S.; Bozhko, S. Droop control design to minimize losses in DC microgrid for more electric aircraft. Electr. Power Syst. Res. 2021, 199, 107452. [Google Scholar] [CrossRef]
- Guo, C.; Liao, J.; Zhang, Y. Adaptive droop control of unbalanced voltage in the multi-node bipolar DC microgrid based on fuzzy control. Int. J. Electr. Power Energy Syst. 2022, 142, 108300. [Google Scholar] [CrossRef]
- Yang, J.; Yuan, C.; Meng, F. Multi-Agent Reinforcement Learning for Active Voltage Control on Multi-Hybrid Microgrid Interconnection System. In Proceedings of the 2022 China Automation Congress (CAC), Xiamen, China, 25–27 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 4700–4704. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, J.; Qin, B.; Guo, L. Coordinated control of wind turbine and hybrid energy storage system based on multi-agent deep reinforcement learning for wind power smoothing. J. Energy Storage 2023, 57, 106297. [Google Scholar] [CrossRef]
- Wang, T.; Ma, S.; Tang, Z.; Xiang, T.; Mu, C.; Jin, Y. A Multi-Agent Reinforcement Learning Method for Cooperative Secondary Voltage Control of Microgrids. Energies 2023, 16, 5653. [Google Scholar] [CrossRef]
- Yang, N.; Han, L.; Liu, R.; Wei, Z.; Liu, H.; Xiang, C. Multi-objective intelligent energy management for hybrid electric vehicles based on multi-agent reinforcement learning. IEEE Trans. Transp. Electrif. 2023, 9, 15974–15983. [Google Scholar] [CrossRef]
- Fang, X.; Zhao, Q.; Wang, J.; Han, Y.; Li, Y. Multi-agent deep reinforcement learning for distributed energy management and strategy optimization of microgrid market. Sustain. Cities Soc. 2021, 74, 103163. [Google Scholar] [CrossRef]
- Shen, R.; Zhong, S.; Wen, X.; An, Q.; Zheng, R.; Li, Y.; Zhao, J. Multi-agent deep reinforcement learning optimization framework for building energy system with renewable energy. Appl. Energy 2022, 312, 118724. [Google Scholar] [CrossRef]
- Chung, S.; Zhang, Y. Artificial Intelligence Applications in Electric Distribution Systems: Post-Pandemic Progress and Prospect. Appl. Sci. 2023, 13, 6937. [Google Scholar] [CrossRef]
- Dong, Z.; Huang, X.; Dong, Y.; Zhang, Z. Multilayer perception-based reinforcement learning supervisory control of energy systems with application to a nuclear steam supply system. Appl. Energy 2020, 259, 114193. [Google Scholar] [CrossRef]
- Wang, C.; Deng, C.; Pan, X. Line impedance compensation control strategy for multiple interlinking converters in hybrid AC/DC microgrid. IET Gener. Transm. Distrib. 2023, 17, 1272–1286. [Google Scholar] [CrossRef]
- Pitt, J.; Mamdani, A. Communication protocols in multi-agent systems: A development method and reference architecture. In Issues in Agent Communication; Springer: Berlin, Germany, 2000; pp. 160–177. [Google Scholar] [CrossRef]
- Zhu, C.; Dastani, M.; Wang, S. A survey of multi-agent reinforcement learning with communication. arXiv 2022, arXiv:2203.08975. [Google Scholar] [CrossRef]
- Niu, Y.; Paleja, R.R.; Gombolay, M.C. Multi-Agent Graph-Attention Communication and Teamin. In Proceedings of the AAMAS, Online, 3–7 May 2021; pp. 964–973. Available online: https://yaruniu.com/assets/pdf/aamas_2021_with_sup.pdf (accessed on 15 August 2023).
- Rahme, S.Y.; Islam, S.; Amrr, S.M.; Iqbal, A.; Khan, I.; Marzband, M. Adaptive sliding mode control for instability compensation in DC microgrids due to EV charging infrastructure. Sustain. Energy Grids Netw. 2023, 35, 101119. [Google Scholar] [CrossRef]
- Al-Saadi, M.; Al-Greer, M. Adaptive Multiagent Primary Secondary Control for Accurate Synchronized Charge-Discharge Scenarios of Battery Distributed Energy Storage Systems in DC Autonomous Microgrid. In Proceedings of the 2022 57th International Universities Power Engineering Conference (UPEC), Istanbul, Turkey, 30 August–2 September 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Pires, V.F.; Pires, A.; Cordeiro, A. DC Microgrids: Benefits, Architectures, Perspectives and Challenges. Energies 2023, 16, 1217. [Google Scholar] [CrossRef]
- Zhang, J.; She, B.; Peng, J.C.-H.; Li, F. A distributed consensus-based optimal energy management approach in DC microgrids. Int. J. Electr. Power Energy Syst. 2022, 140, 108015. [Google Scholar] [CrossRef]
- Alsharif, A.; Ahmed, A.A.; Khaleel, M.M.; Alarga AS, D.; Jomah, O.S.; Imbayah, I. Comprehensive state-of-the-art of vehicle-to-grid technology. In Proceedings of the 2023 IEEE 3rd International Maghreb Meeting of the Conference on Sciences and Techniques of Automatic Control and Computer Engineering (MI-STA), Benghazi, Libya, 21–23 May 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 530–534. [Google Scholar] [CrossRef]












| Parameters and Factors | Symbol | Value |
|---|---|---|
| Voltages, Nominal/Battery | 48, 24 V | |
| Nominal Current of Batteries | 3.913–4.782 A | |
| Batteries’ Maximum Capacity | 9–11 Ah | |
| Converter Capacitances | 125–1000 µf | |
| Converter Inductance | L | 2.4 mH |
| Switching Frequency | 5 KHz | |
| Local Voltage Control Proportional/Integral Gains | 0.85, 10 | |
| Local Current Control Proportional/Integral Gains | 0.1, 10 | |
| Droop Coefficient | rd | 0.5 |
| SOC Correction Proportional/Integral Gains | 0.4, 20 | |
| Secondary Voltage Correction Proportional/Integral Gains | 10, 0.5 | |
| Secondary Current Correction Proportional/Integral Gains | 0.4, 20 | |
| Consensus Gains | 10, 20 |
| Branch | Symbol | Value/Ω |
|---|---|---|
| Entry 1: Transmission connection between the renewable resource and the DC microgrid bus | 0.06 | |
| BESS 1 line | 0.04 | |
| Load 1 line | 0.05 | |
| Transmission connection between the BESS 1 and BESS N − 1 | 0.06 | |
| BESS N − 1 line | 0.05 | |
| Load N − 1 line | 0.03 | |
| Transmission connection between the BESS N − 1 and BESS N | 0.04 | |
| BESS N line | 0.03 | |
| Load N line | 0.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Saadi, M.; Short, M. Multiagent-Based Control for Plug-and-Play Batteries in DC Microgrids with Infrastructure Compensation. Batteries 2023, 9, 597. https://doi.org/10.3390/batteries9120597
Al-Saadi M, Short M. Multiagent-Based Control for Plug-and-Play Batteries in DC Microgrids with Infrastructure Compensation. Batteries. 2023; 9(12):597. https://doi.org/10.3390/batteries9120597
Chicago/Turabian StyleAl-Saadi, Mudhafar, and Michael Short. 2023. "Multiagent-Based Control for Plug-and-Play Batteries in DC Microgrids with Infrastructure Compensation" Batteries 9, no. 12: 597. https://doi.org/10.3390/batteries9120597
APA StyleAl-Saadi, M., & Short, M. (2023). Multiagent-Based Control for Plug-and-Play Batteries in DC Microgrids with Infrastructure Compensation. Batteries, 9(12), 597. https://doi.org/10.3390/batteries9120597