
The Application of Fuel-Cell and Battery Technologies in Unmanned Aerial Vehicles (UAVs): A Dynamic Study



Abstract
:1. Introduction
- As support when the load was too high for the fuel cell,
- As support when the fuel cell took too long to respond to a load variation,
- As additional load when the state of the charge of the battery was low (meaning that the fuel cell recharged the battery).
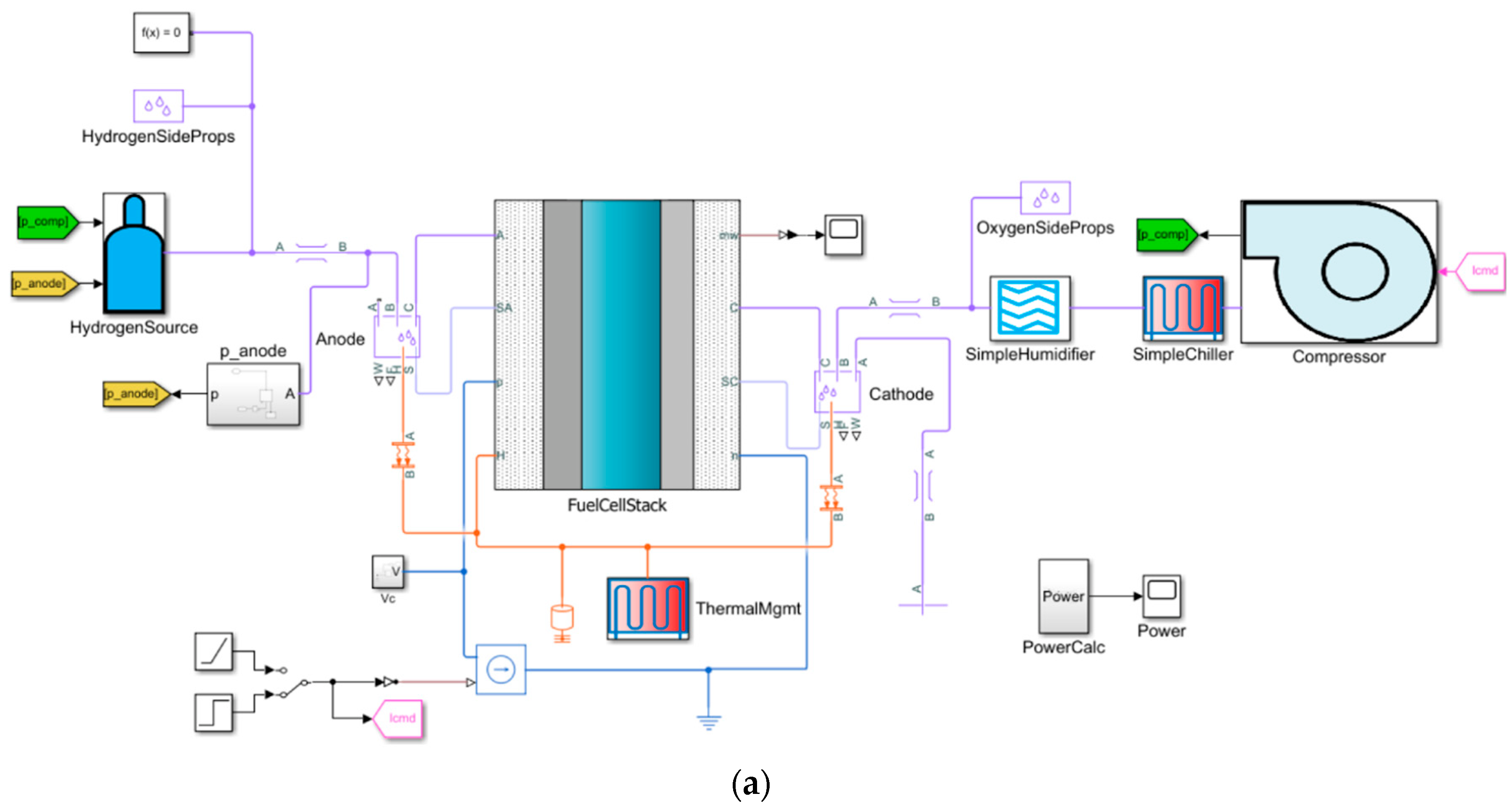
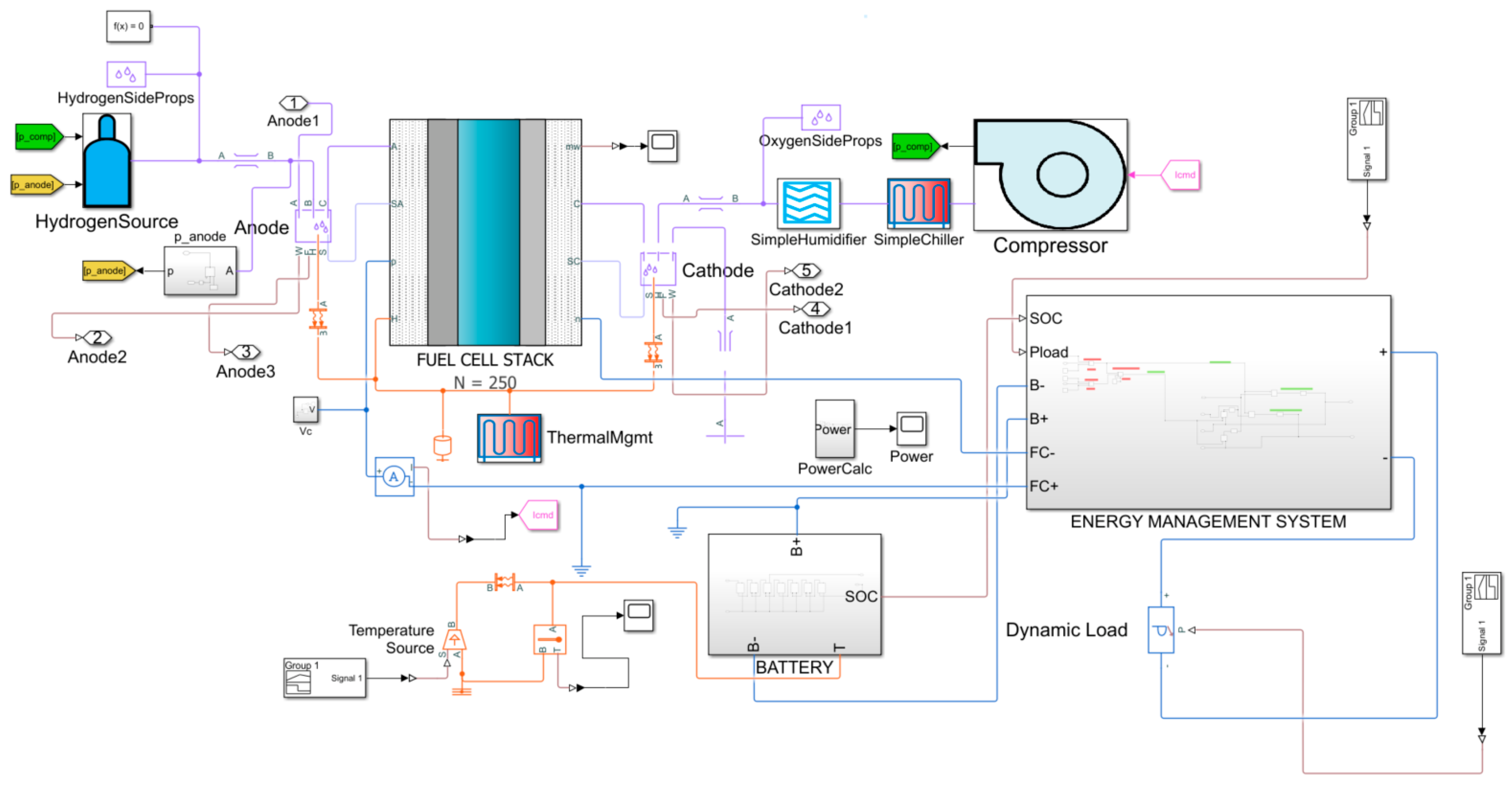
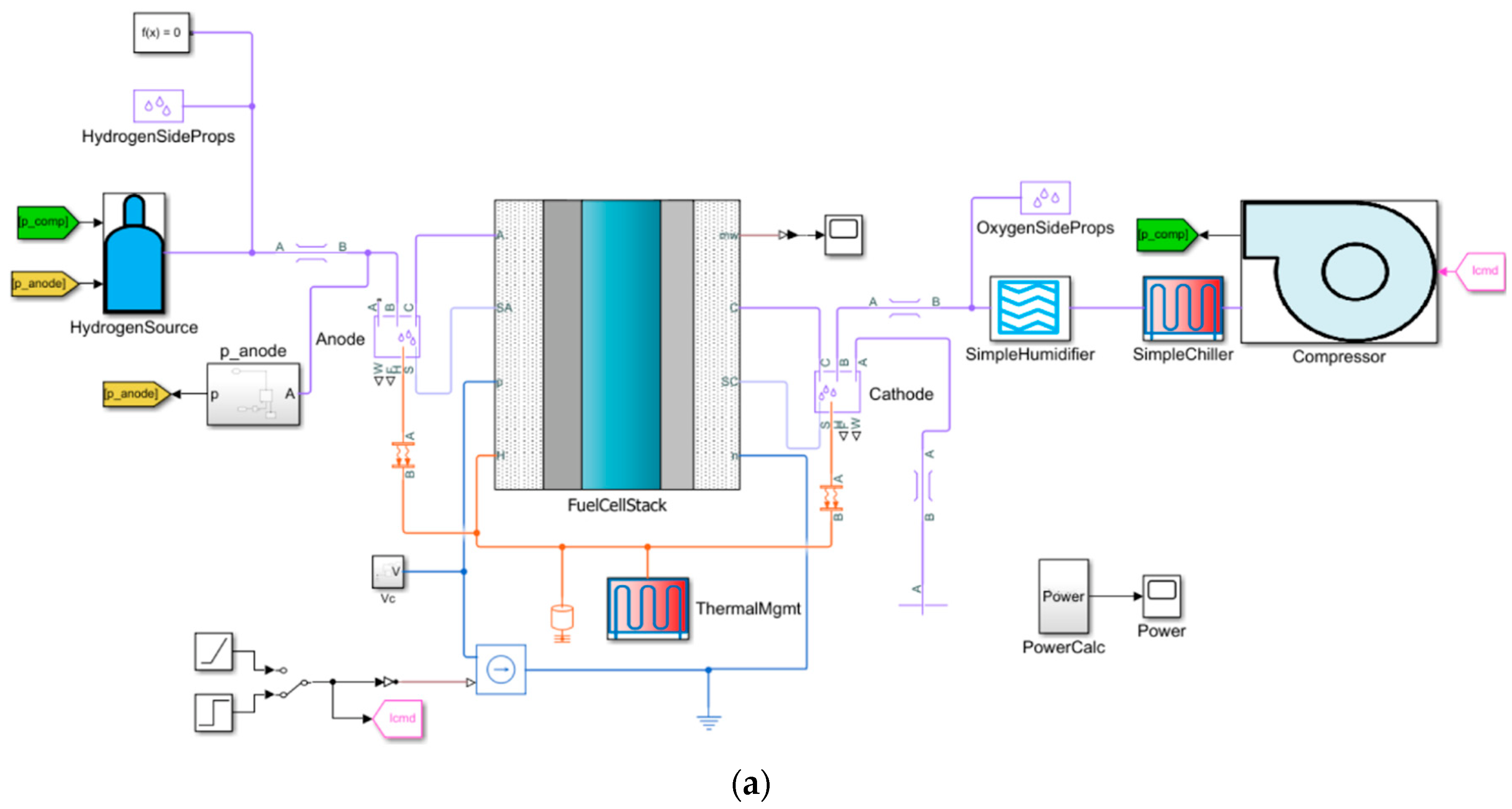
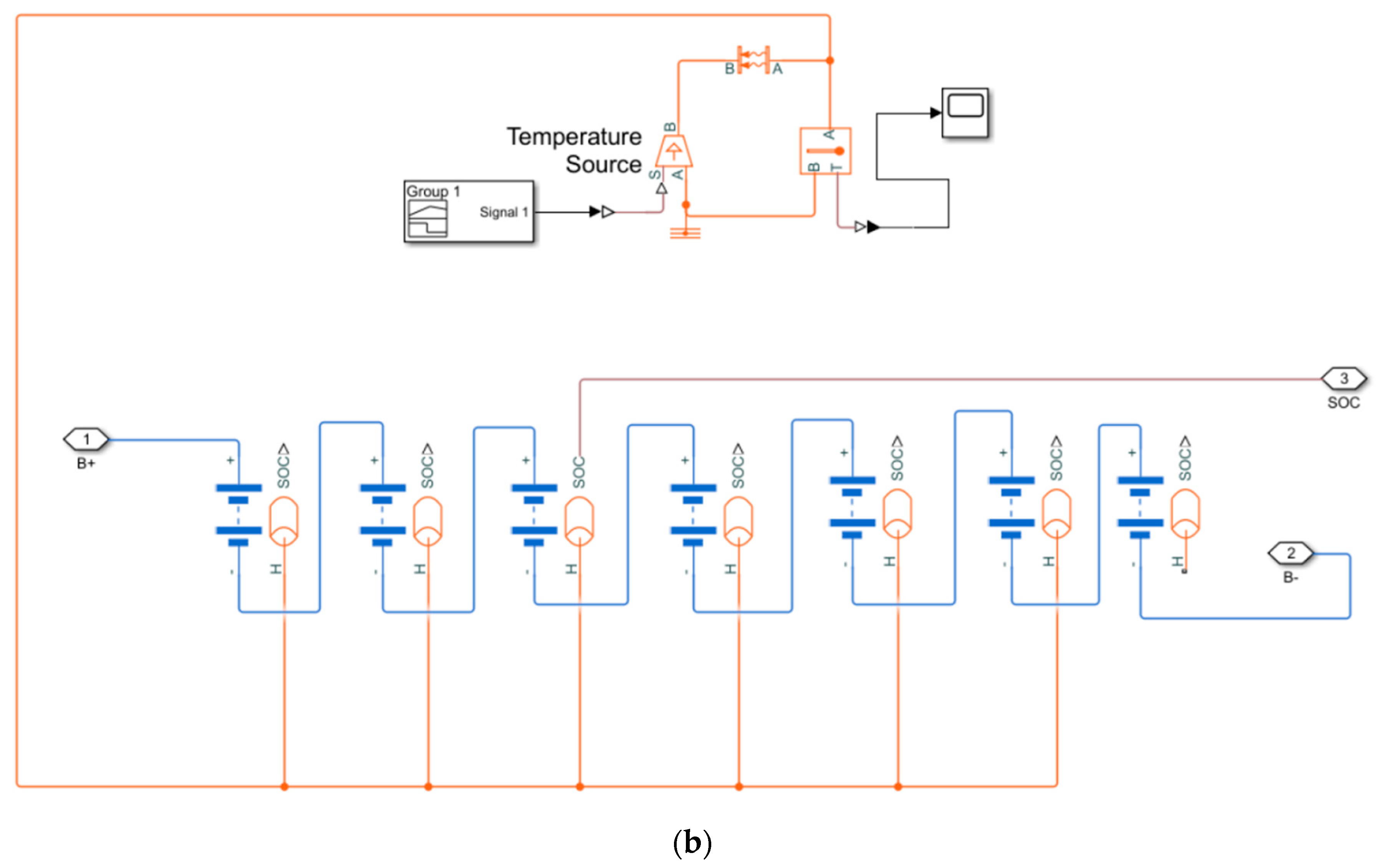
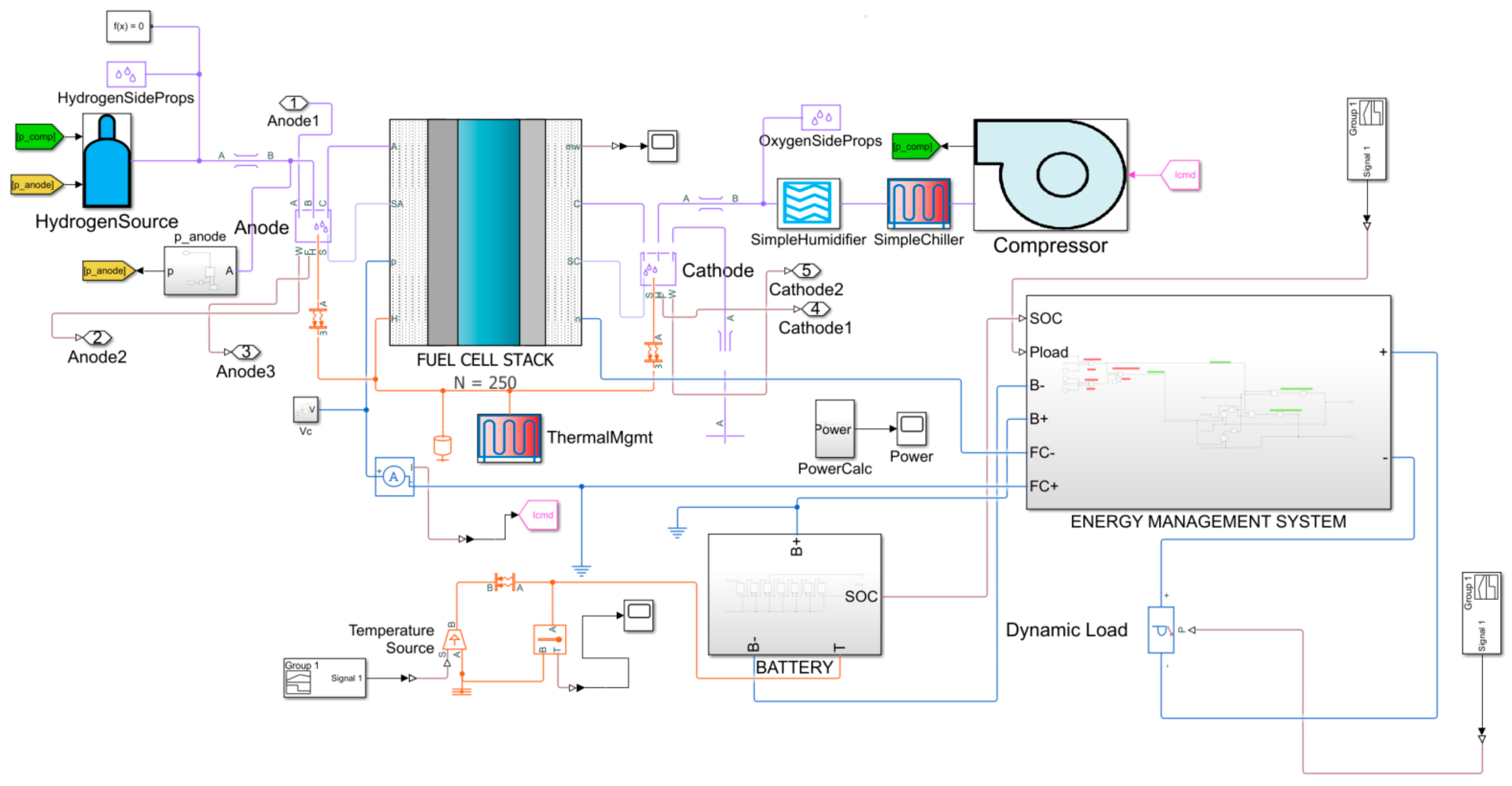
2. Methodology
- State (1) and SOC: In this condition, the PEMFC works between the rated and the minimum powers.
- State (2) and high SOC: This case will not happen as the capacities of the PEMFC and battery were designed properly.
- State (3) and high SOC: The PEMFC works at the maximum power, while the SOC is reduced. The operating power of the battery is .
- State (4) and normal SOC: In this condition, the battery can be charged, and, if the battery reaches a high SOC, the hybrid system goes to state (1).
- State (5) and normal SOC: In this situation, the SOC is enhanced, while the PEMFC works at constant power while the battery is being charged.
- State (6) and normal SOC: The SOC is reduced at the maximum power of the PEMFC, similar to state (3).
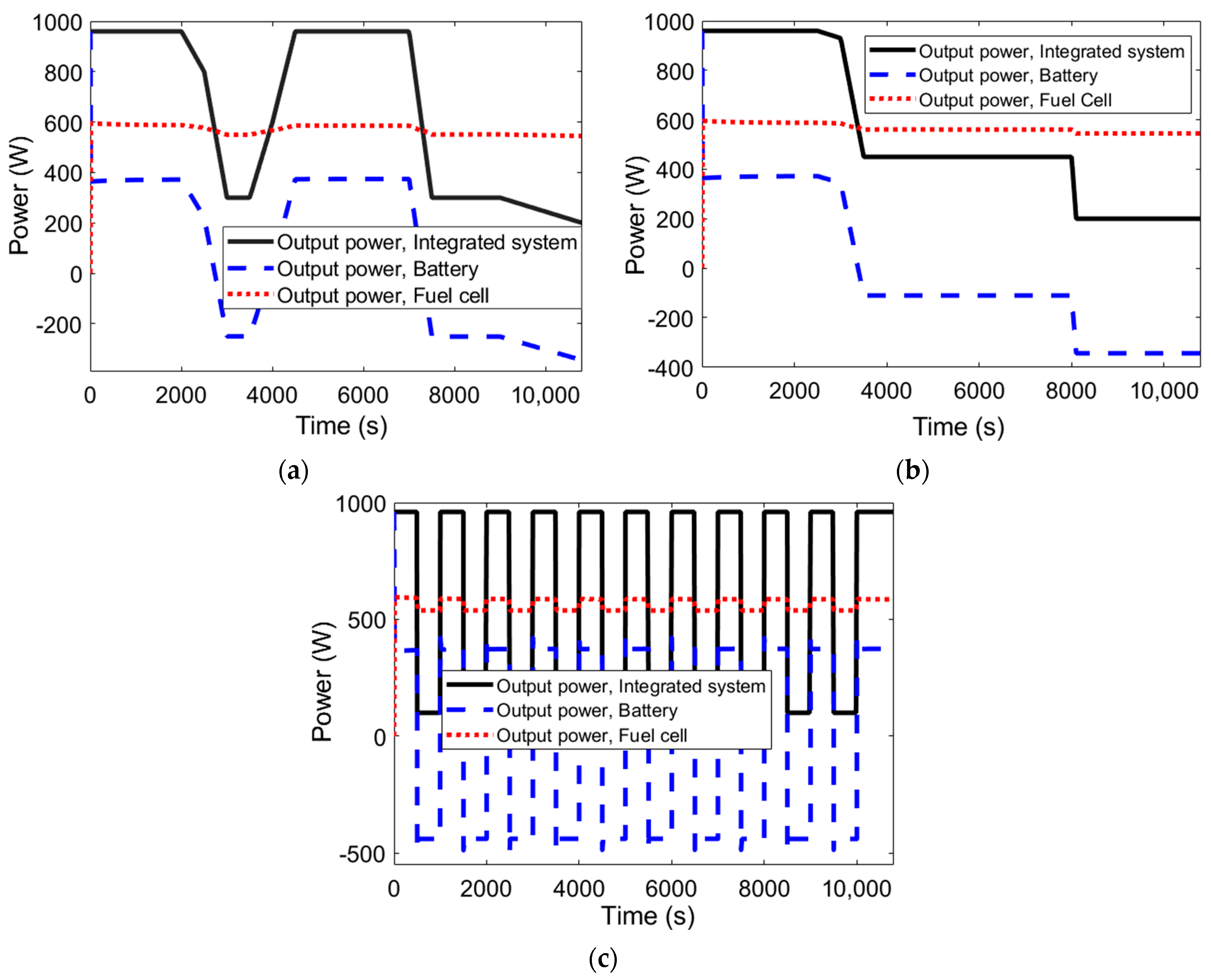
- First, if and (the nominal output of the fuel cell), the battery goes through discharging, given the conditions in state (3) and state (6).
- Second, if the and the load is below 600 W, the battery is charged, indicating state (4) and state (5).
- Third, if the load is below 600 W and the , the battery is not used, signifying state (1).
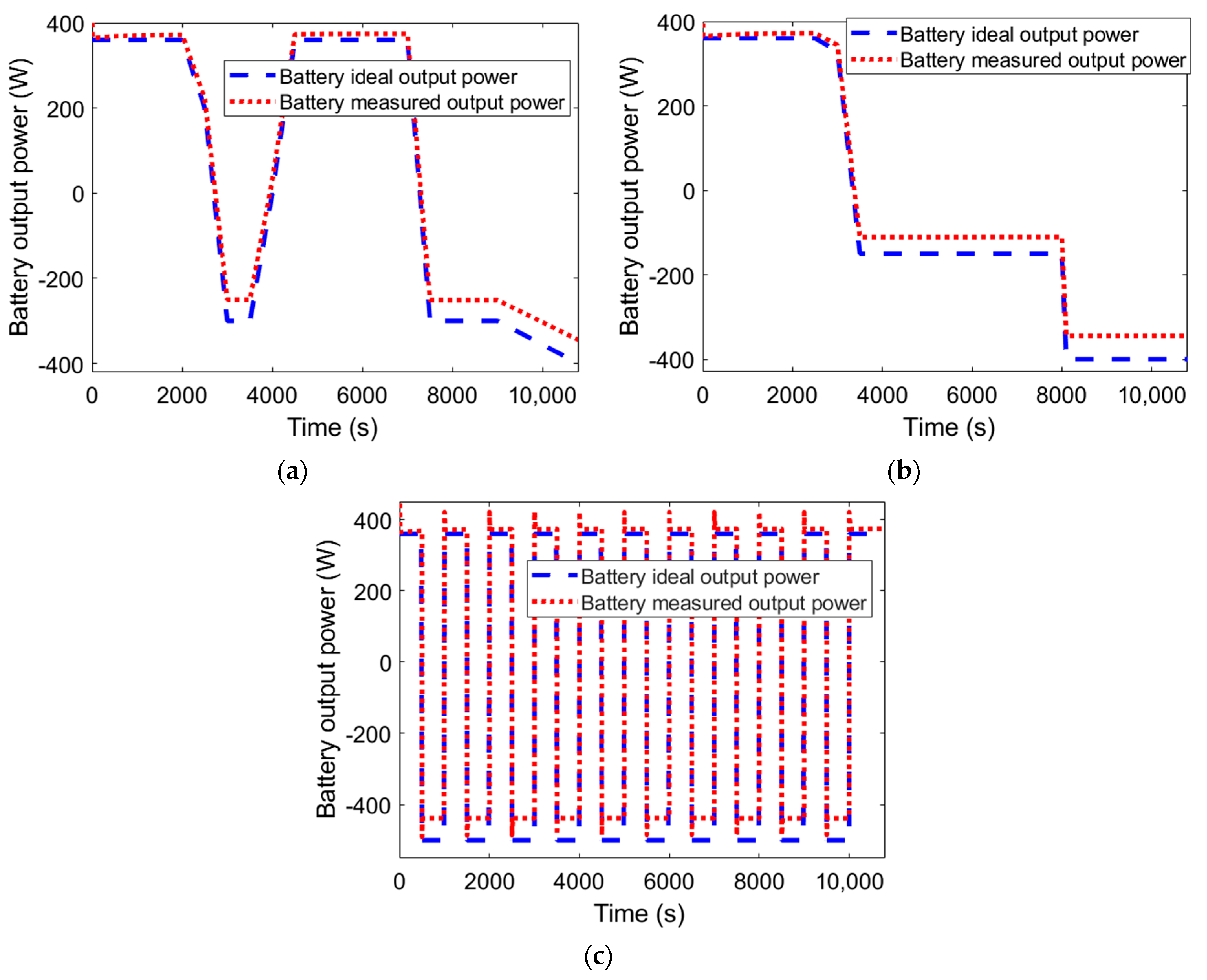
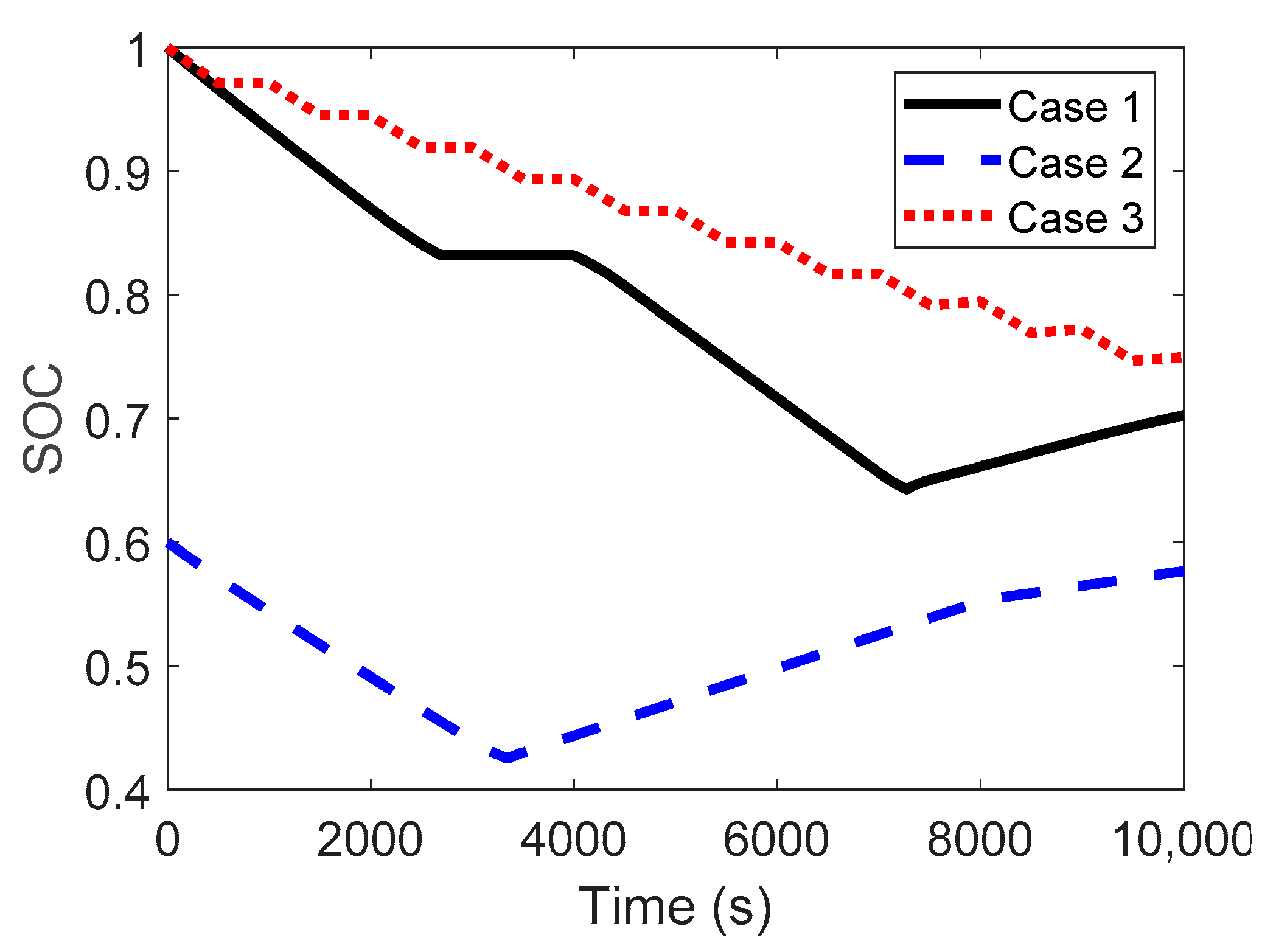
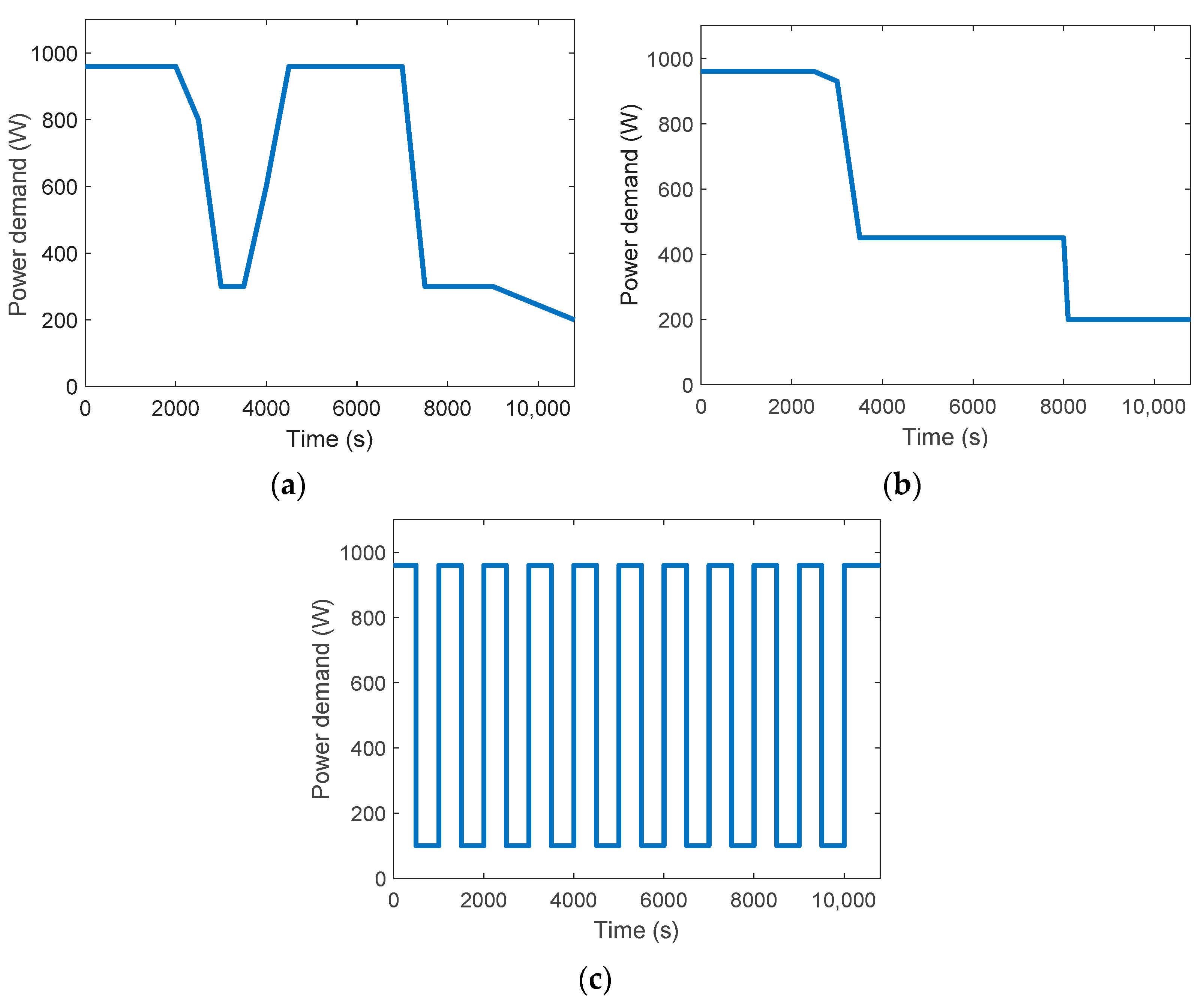
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pandyaswargo, A.H.; Wibowo, A.D.; Maghfiroh, M.F.; Rezqita, A.; Onoda, H. The Emerging Electric Vehicle and Battery Industry in Indonesia: Actions around the Nickel Ore Export Ban and a SWOT Analysis. Batteries 2021, 7, 80. [Google Scholar] [CrossRef]
- Kotak, B.; Kotak, Y.; Brade, K.; Kubjatko, T.; Schweiger, H.-G. Battery Crush Test Procedures in Standards and Regulation: Need for Augmentation and Harmonisation. Batteries 2021, 7, 63. [Google Scholar] [CrossRef]
- Gay, M.; Pourrahmani, H.; Van Herle, J. Fuel cell and battery technologies for a 800 kW ferry: Two optimized scenarios. Sci. Talks 2022, 3, 100039. [Google Scholar] [CrossRef]
- Pelegov, D.V.; Pontes, J. Main Drivers of Battery Industry Changes: Electric Vehicles—A Market Overview. Batteries 2018, 4, 65. [Google Scholar] [CrossRef] [Green Version]
- Kovachev, G.; Astner, A.; Gstrein, G.; Aiello, L.; Hemmer, J.; Sinz, W.; Ellersdorfer, C. Thermal Conductivity in Aged Li-Ion Cells under Various Compression Conditions and State-of-Charge. Batteries 2021, 7, 42. [Google Scholar] [CrossRef]
- Li, Y.; Liang, W.; Xu, W.; Jia, X. Data Collection of IoT Devices Using an Energy-Constrained UAV. In Proceedings of the 2020 IEEE International Parallel and Distributed Processing Symposium (IPDPS), New Orleans, LA, USA, 18–22 May 2020; pp. 644–653. [Google Scholar]
- Li, X.; Yang, L. Design and Implementation of UAV Intelligent Aerial Photography System. In Proceedings of the 2012 4th International Conference on Intelligent Human-Machine Systems and Cybernetics, Nanchang, China, 26–27 August 2012; Volume 2, pp. 200–203. [Google Scholar]
- Perez, D.; Maza, I.; Caballero, F.; Scarlatti, D.; Casado, E.; Ollero, A. A ground control station for a multi-UAV surveillance system. J. Intell. Robot. Syst. 2013, 69, 119–130. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Yahya, Z.; Imane, S.; Hicham, H.; Ghassane, A.; Bouchini-Idrissi Safia, E. Applied imagery pattern recognition for photovoltaic modules’ inspection: A review on methods, challenges and future development. Sustain. Energy Technol. Assess. 2022, 52, 102071. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef] [Green Version]
- Mao, R.; Du, B.; Sun, D.; Kong, N. Optimizing a UAV-based emergency medical service network for trauma injury patients. In Proceeding of the 2015 IEEE 15th Conference onAutomation Science and Engineering (CASE), Vancouver, BC, Canada, 22–26 August 2019; pp. 721–726. [Google Scholar]
- Herwerth, C.; Chiang, C.; Ko, A.; Matsuyama, S.; Choi, S.B.; Mirmirani, M.; Gamble, D.; Paul, R.; Sanchez, V.; Arena, A.; et al. Development of a small long endurance hybrid PEM fuel cell powered UAV. In Proceedings of the 2007 Aerospace Technology Conference and Exposition, Long Beach, CA, USA, 18–20 September 2007. [Google Scholar] [CrossRef]
- Nguyen, T.-T.; Fushinobu, K. Effect of operating conditions and geometric structure on the gas crossover in PEM fuel cell. Sustain. Energy Technol. Assess. 2020, 37, 100584. [Google Scholar] [CrossRef]
- González-Espasandín, Ó.; Leo, T.J.; Navarro-Arévalo, E. Fuel cells: A real option for unmanned aerial vehicles propulsion. Sci. World J. 2014, 2014, 497642. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pourrahmani, H.; Van herle, J. Water management of the proton exchange membrane fuel cells: Optimizing the effect of microstructural properties on the gas diffusion layer liquid removal. Energy 2022, 256, 124712. [Google Scholar] [CrossRef]
- Wu, J.; Yuan, X.Z.; Martin, J.J.; Wang, H.; Zhang, J.; Shen, J.; Wu, S.; Merida, W. A review of PEM fuel cell durability: Degradation mechanisms and mitigation strategies. J. Power Sources 2008, 184, 104–119. [Google Scholar] [CrossRef]
- Pourrahmani, H.; Van herle, J. The impacts of the gas diffusion layer contact angle on the water management of the proton exchange membrane fuel cells: Three-dimensional simulation and optimization. Int. J. Energy Res. 2022. [Google Scholar] [CrossRef]
- Pourrahmani, H.; Shakeri, H.; Van herle, J. Thermoelectric Generator as the Waste Heat Recovery Unit of Proton Exchange Membrane Fuel Cell: A Numerical Study. Energies 2022, 15, 18. [Google Scholar] [CrossRef]
- Pourrahmani, H.; Gay, M.; Van herle, J. Electric vehicle charging station using fuel cell technology: Two different scenarios and thermodynamic analysis. Energy Rep. 2021, 7, 6955–6972. [Google Scholar] [CrossRef]
- Wang, Y.; Ruiz Diaz, D.F.; Chen, K.S.; Wang, Z.; Adroher, X.C. Materials, technological status, and fundamentals of PEM fuel cells—A review. Mater. Today 2020, 32, 178–203. [Google Scholar] [CrossRef]
- Bahari, M.; Rostami, M.; Entezari, A.; Ghahremani, S.; Etminan, M. Performance evaluation and multi-objective optimization of a novel UAV propulsion system based on PEM fuel cell. Fuel 2022, 311, 122554. [Google Scholar]
- Depcik, C.; Cassady, T.; Collicott, B.; Burugupally, S.P.; Li, X.; Alam, S.S.; Arandia, J.R.; Hobeck, J. Comparison of lithium ion Batteries, hydrogen fueled combustion Engines, and a hydrogen fuel cell in powering a small Unmanned Aerial Vehicle. Energy Convers. Manag. 2020, 207, 112514. [Google Scholar] [CrossRef]
- Dudek, M.; Tomczyk, P.; Wygonik, P.; Korkosz, M.; Bogusz, P.; Lis, B. Hybrid fuel cell–battery system as a main power unit for small unmanned aerial vehicles (UAV). Int. J. Electrochem. Sci 2013, 8, 8442–8463. [Google Scholar]
- Baazouzi, S.; Rist, F.P.; Weeber, M.; Birke, K.P. Optimization of Disassembly Strategies for Electric Vehicle Batteries. Batteries 2021, 7, 74. [Google Scholar] [CrossRef]
- Dündar, Ö.; Bilici, M.; Ünler, T. Design and performance analyses of a fixed wing battery VTOL UAV. Eng. Sci. Technol. Int. J. 2020, 23, 1182–1193. [Google Scholar] [CrossRef]
- Traub, L.W. Validation of endurance estimates for battery powered UAVs. Aeronaut. J. 2013, 117, 1155–1166. [Google Scholar] [CrossRef]
- Saha, B.; Koshimoto, E.; Quach, C.C.; Hogge, E.F.; Strom, T.H.; Hill, B.L.; Vazquez, S.L.; Goebel, K. Battery health management system for electric UAVs. In Proceedings of the 2011 Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011; pp. 1–9. [Google Scholar]
- Wang, L.; Chen, Y.; Wen, X.; Li, J.; Meng, P.; Tao, S. Preparation of Li1.2Ni0.2Mn0.6O2 hollow stratified sphere by self-template method and surface vulcanization. Sustain. Energy Technol. Assess. 2022, 52, 102006. [Google Scholar] [CrossRef]
- Da Silva Lima, L.; Quartier, M.; Buchmayr, A.; Sanjuan-Delmás, D.; Laget, H.; Corbisier, D.; Mertens, J.; Dewulf, J. Life cycle assessment of lithium-ion batteries and vanadium redox flow batteries-based renewable energy storage systems. Sustain. Energy Technol. Assess. 2021, 46, 101286. [Google Scholar] [CrossRef]
- Bayat, M.; Özalp, M.; Gürbüz, H. Comprehensive performance analysis of a high-temperature PEM fuel cell under different operating and design conditions. Sustain. Energy Technol. Assess. 2022, 52, 102232. [Google Scholar] [CrossRef]
- Charfi, S.; Atieh, A.; Chaabene, M. The effect of batteries DOD range setting values on diesel engine generator pollution and overall cost of a hybrid solar/diesel/battery system. In Proceedings of the 2016 International Renewable and Sustainable Energy Conference (IRSEC), Marrakech, Morocco, 14–17 November 2016; pp. 956–960. [Google Scholar]
- Li, J.; Wang, D.; Pecht, M. An electrochemical model for high C-rate conditions in lithium-ion batteries. J. Power Sources 2019, 436, 226885. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Capacity | 15 (Ah) |
| Charging temperature | 0 °C to 45 °C |
| Cycle life | 1000 cycles |
| Dimension | ) |
| Discharging temperature | −20 °C to 60 °C |
| Energy storage | 360 (Wh) |
| Internal resistance () | / |
| Maximum charge C-rate | 1C |
| Maximum discharge C-rate | 5/3C |
| Maximum discharge current | 15 (A) |
| Nominal discharge current | 7.5 (A) |
| Normal charge current | 3.0 (A) |
| Operating and storage humidity | 60% ± 25% RH |
| Standard charge C-rate | 0.5C |
| Standard discharge C-rate | 0.2C |
| Voltage | 24 (V) |
| Weight | 2.3 (kg) |
| Parameter | Value |
|---|---|
| Nominal voltage | 24 (V) |
| Nominal power | 600 (W) |
| Nominal current density | 25 (A) |
| Number of cells | 255 cells |
| DC voltage range | 22–36 (V) |
| Hydrogen pressure | 0.04–0.06 (MPa) |
| Hydrogen consumption at nominal power | 7000 (mL/min) |
| System weight | 2.590 kg |
| System size | ) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pourrahmani, H.; Bernier, C.M.I.; Van herle, J. The Application of Fuel-Cell and Battery Technologies in Unmanned Aerial Vehicles (UAVs): A Dynamic Study. Batteries 2022, 8, 73. https://doi.org/10.3390/batteries8070073
Pourrahmani H, Bernier CMI, Van herle J. The Application of Fuel-Cell and Battery Technologies in Unmanned Aerial Vehicles (UAVs): A Dynamic Study. Batteries. 2022; 8(7):73. https://doi.org/10.3390/batteries8070073
Chicago/Turabian StylePourrahmani, Hossein, Claire Marie Isabelle Bernier, and Jan Van herle. 2022. "The Application of Fuel-Cell and Battery Technologies in Unmanned Aerial Vehicles (UAVs): A Dynamic Study" Batteries 8, no. 7: 73. https://doi.org/10.3390/batteries8070073
APA StylePourrahmani, H., Bernier, C. M. I., & Van herle, J. (2022). The Application of Fuel-Cell and Battery Technologies in Unmanned Aerial Vehicles (UAVs): A Dynamic Study. Batteries, 8(7), 73. https://doi.org/10.3390/batteries8070073