


Controlling Algorithm of Reconfigurable Battery for State of Charge Balancing Using Amortized Q-Learning


Abstract
1. Introduction
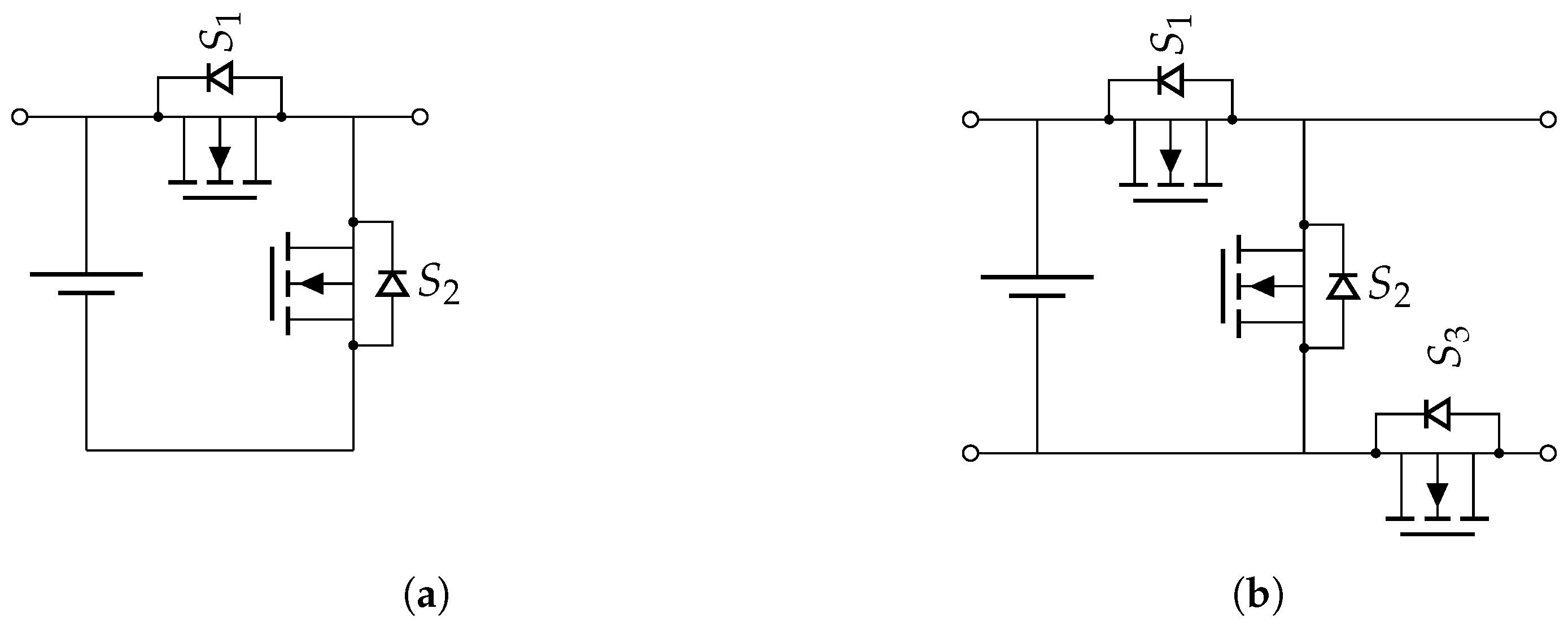
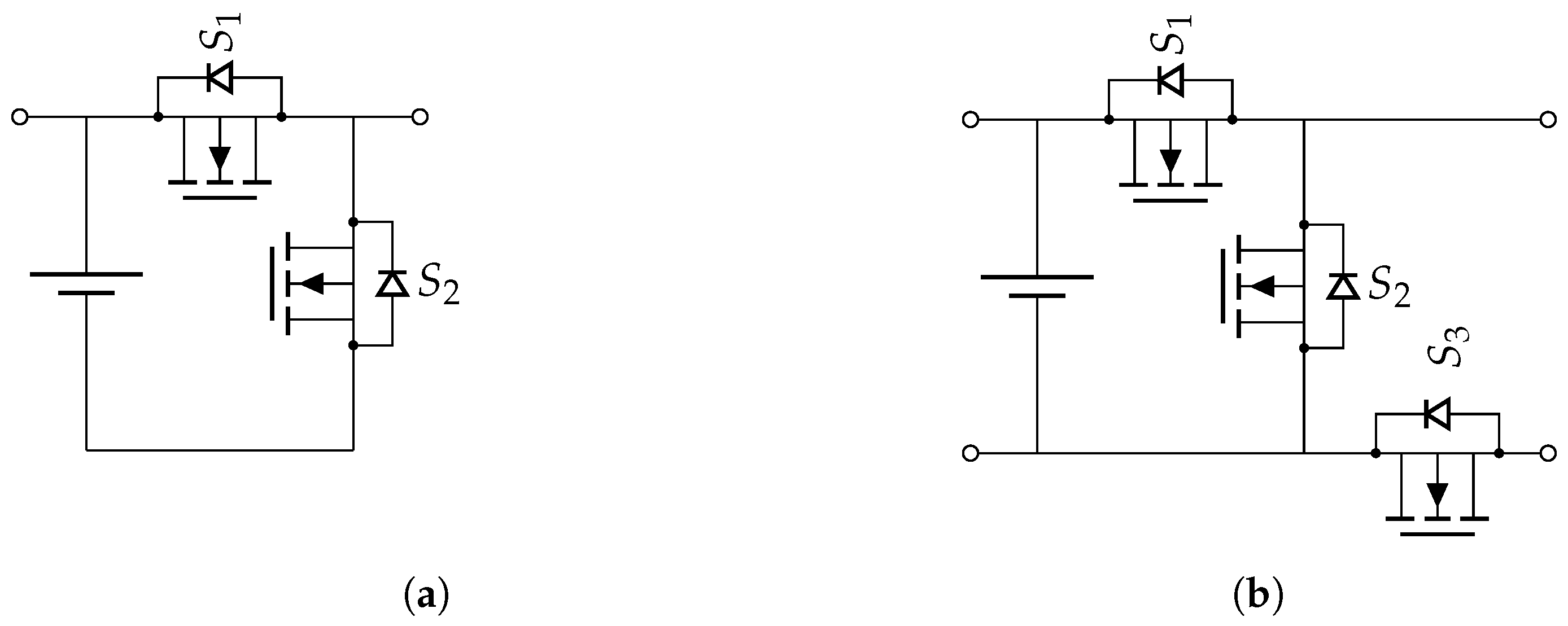
2. Reconfigurable Battery
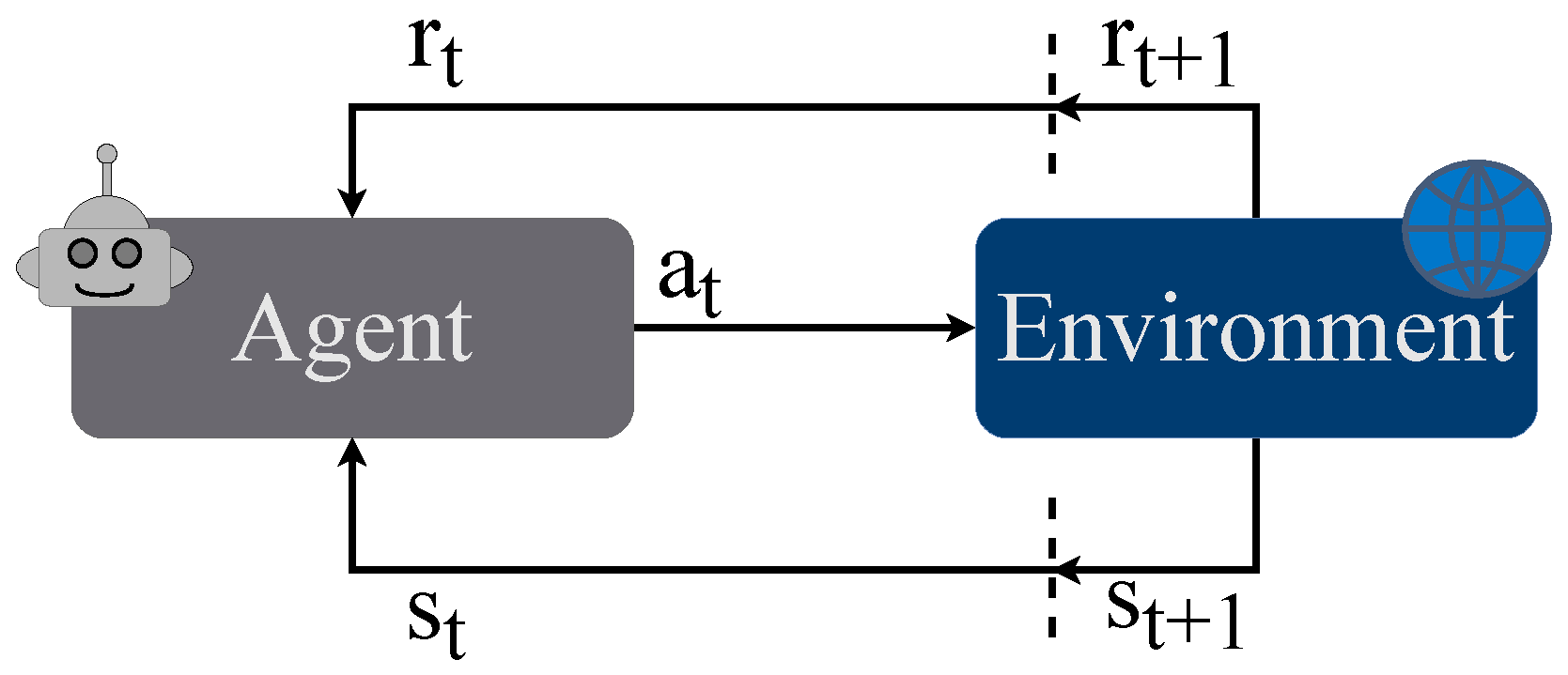
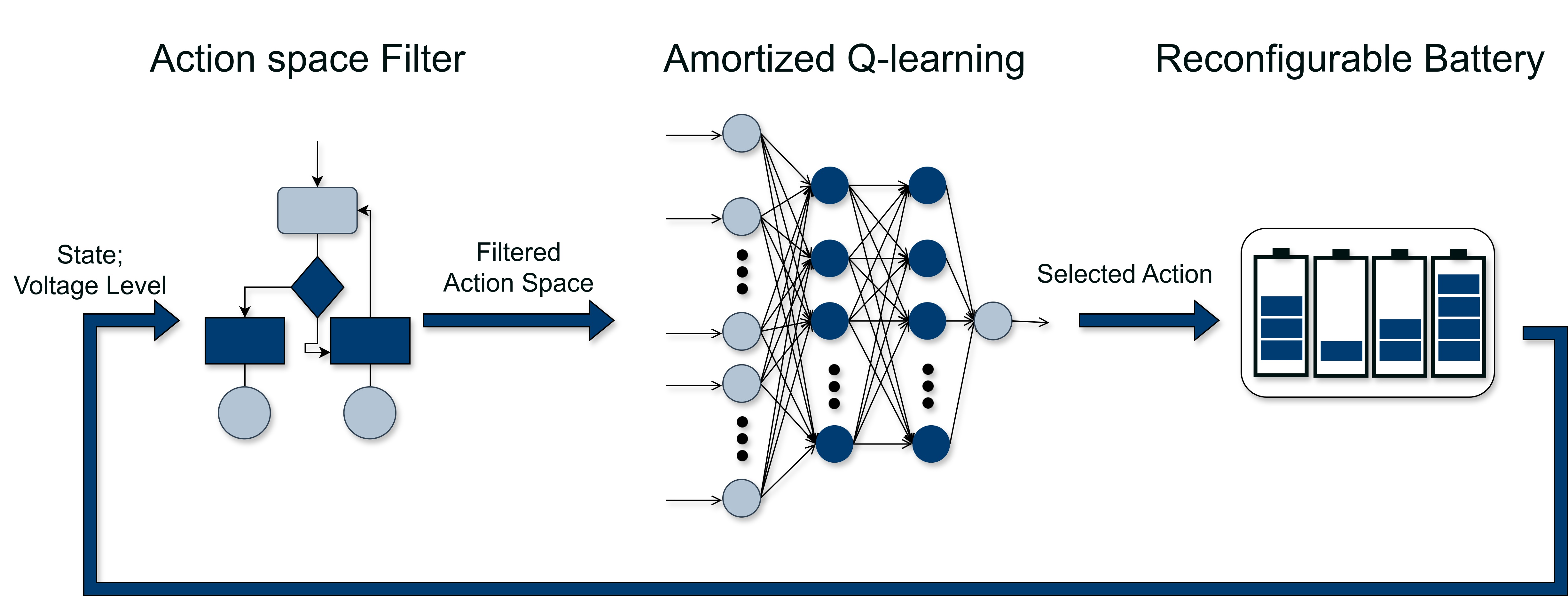
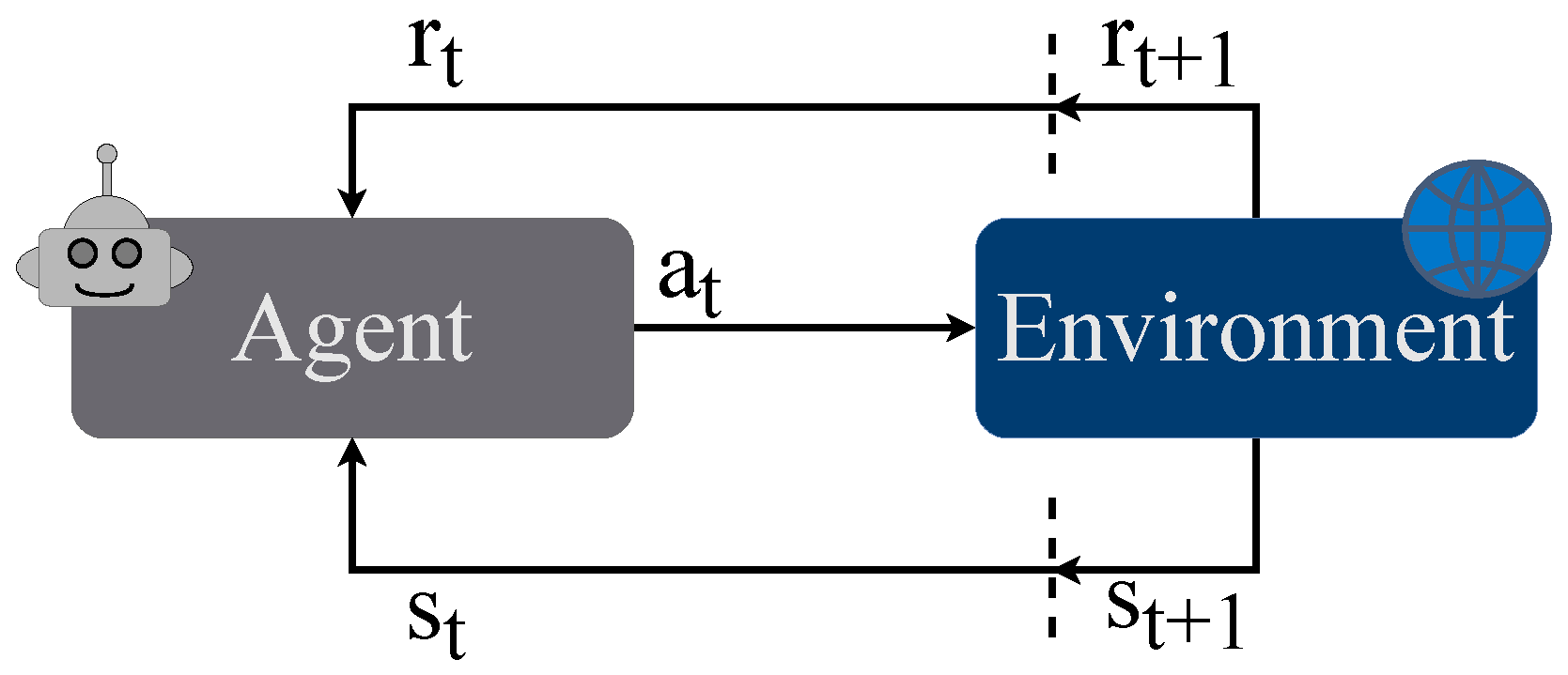
3. Reinforcement Learning Model
3.1. State Space
3.2. Action Space
3.3. Reward Function
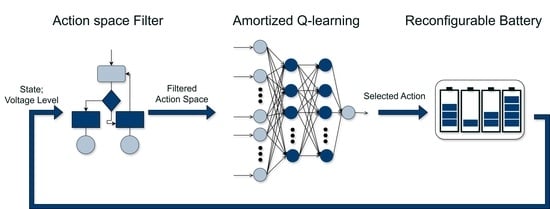
3.4. Learning Algorithm
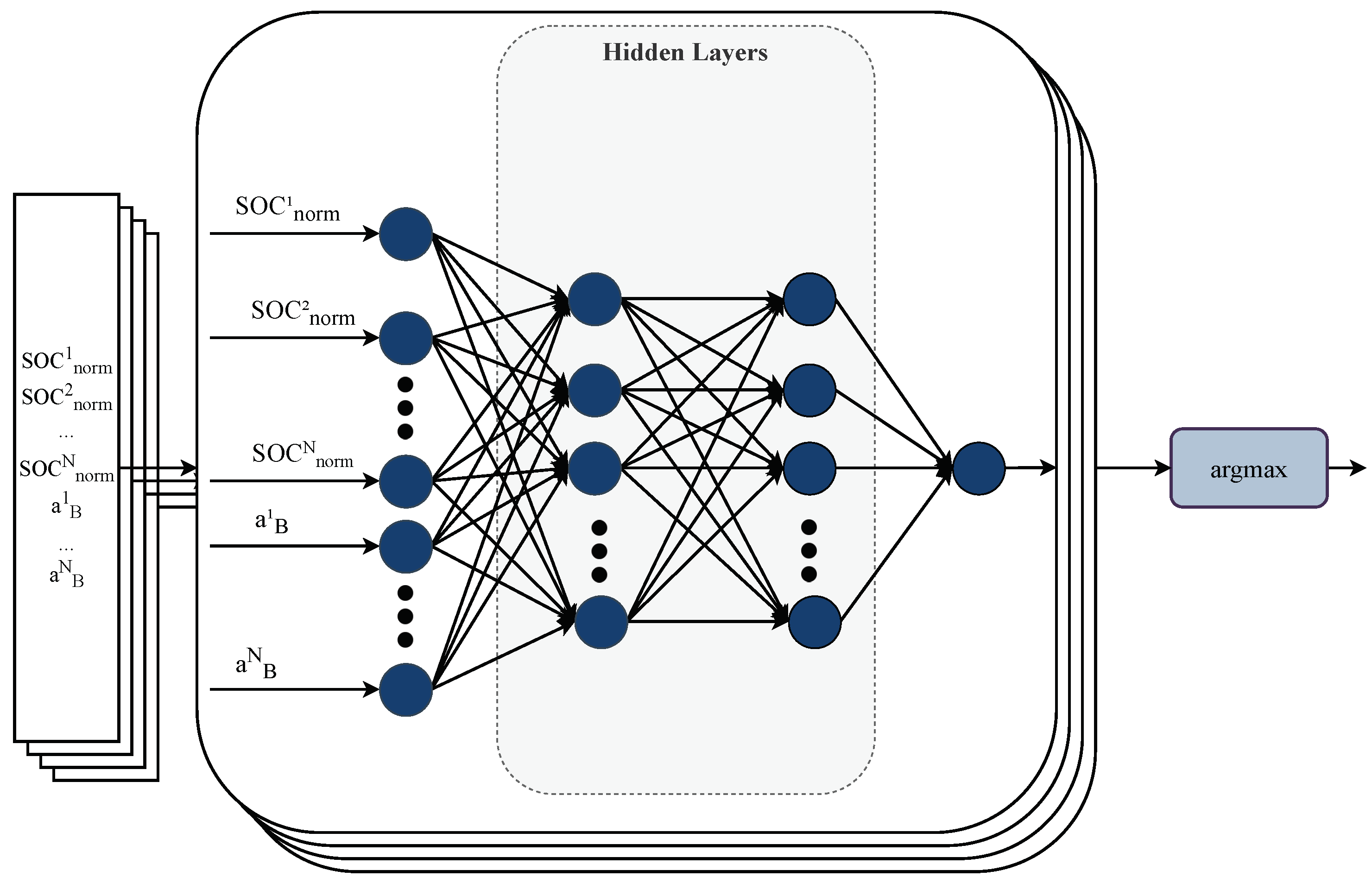
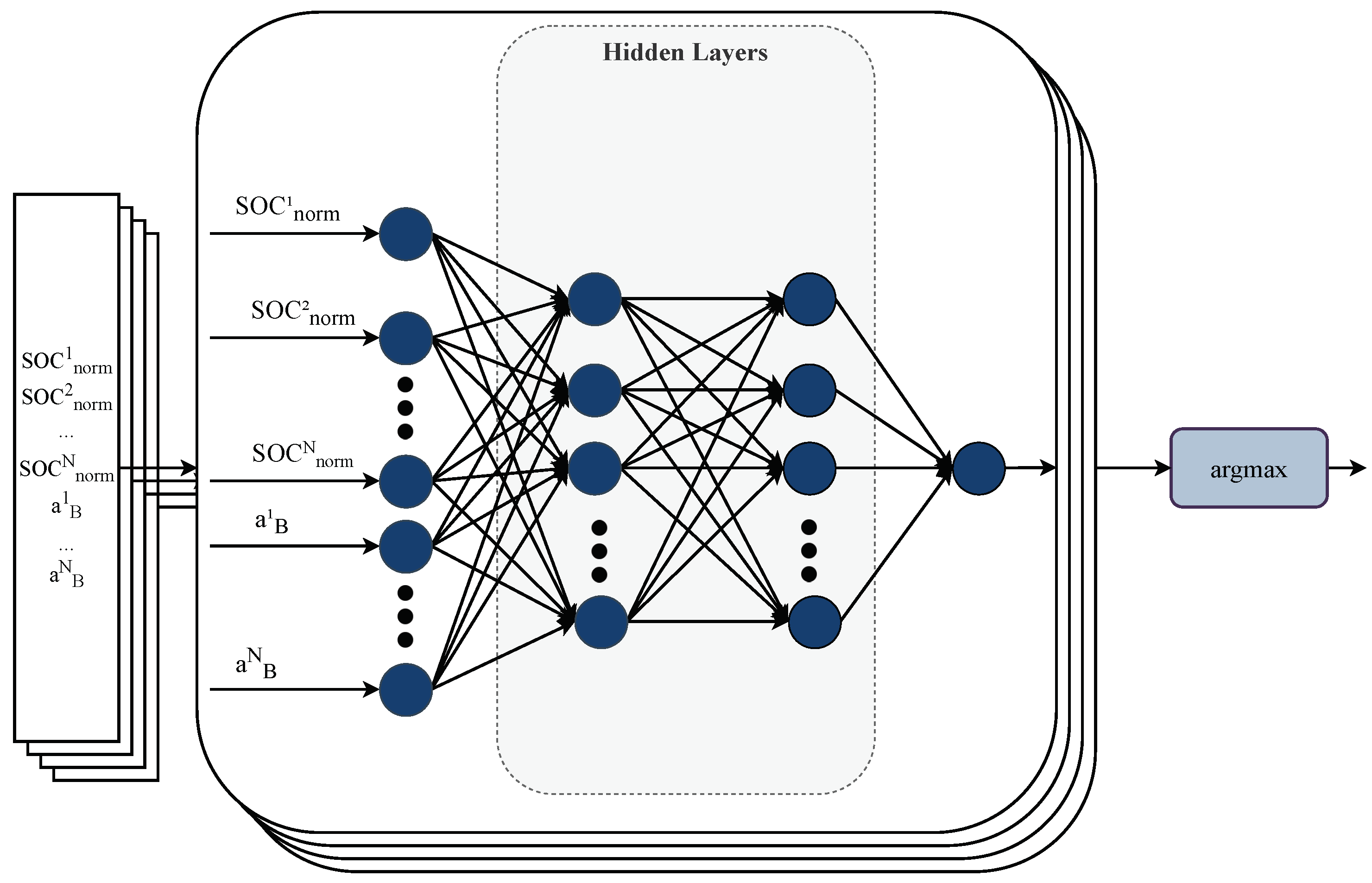
3.5. Neural Network and Training
| Algorithm 1 Amortized Q-learning (AQL) training |
|
4. Description of Environment and Model
4.1. Training Environment
4.2. Model Implementation and Training
5. Experimental Analysis
- The simulative balancing of a 12-cell BM3 converter system.
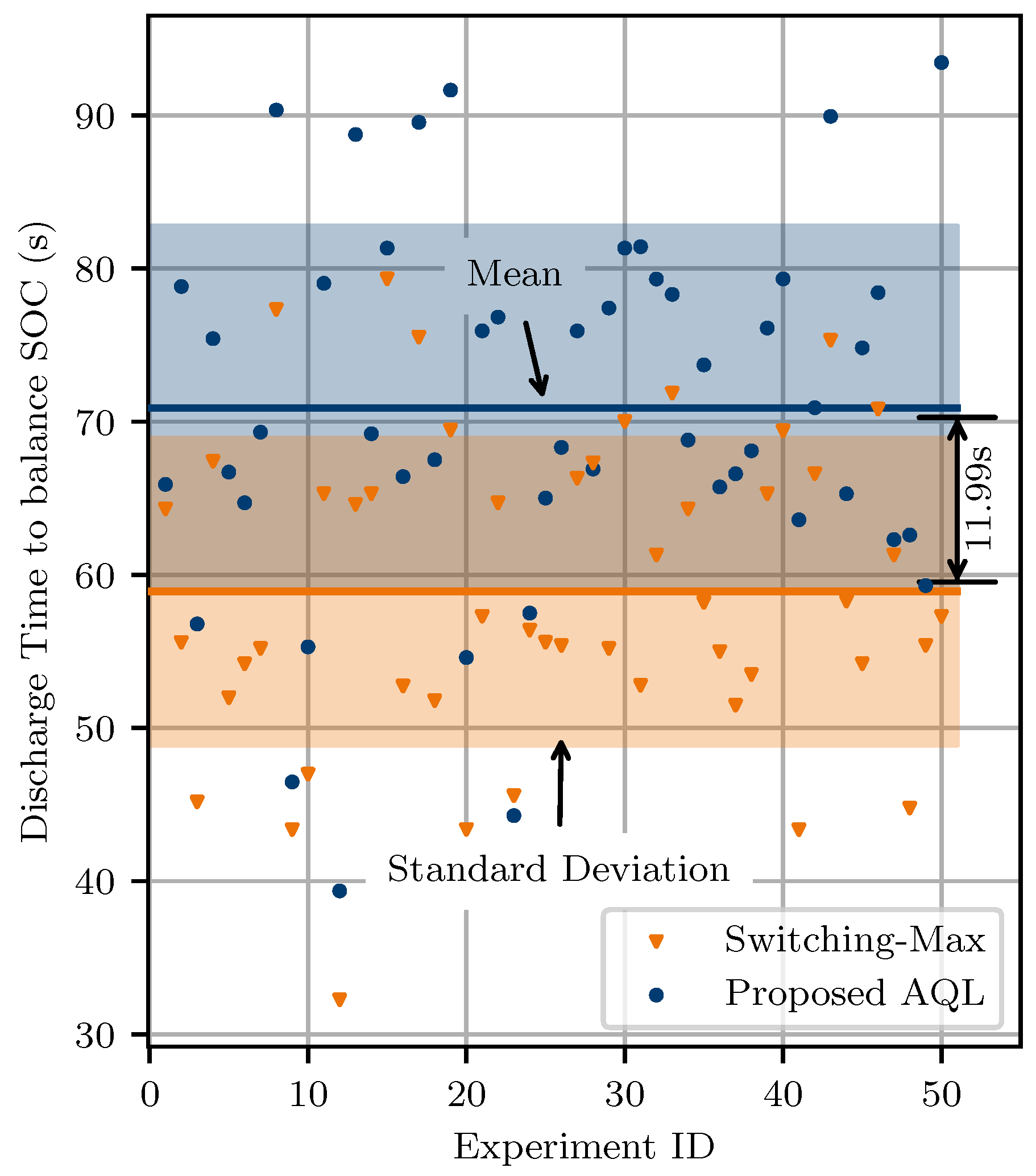
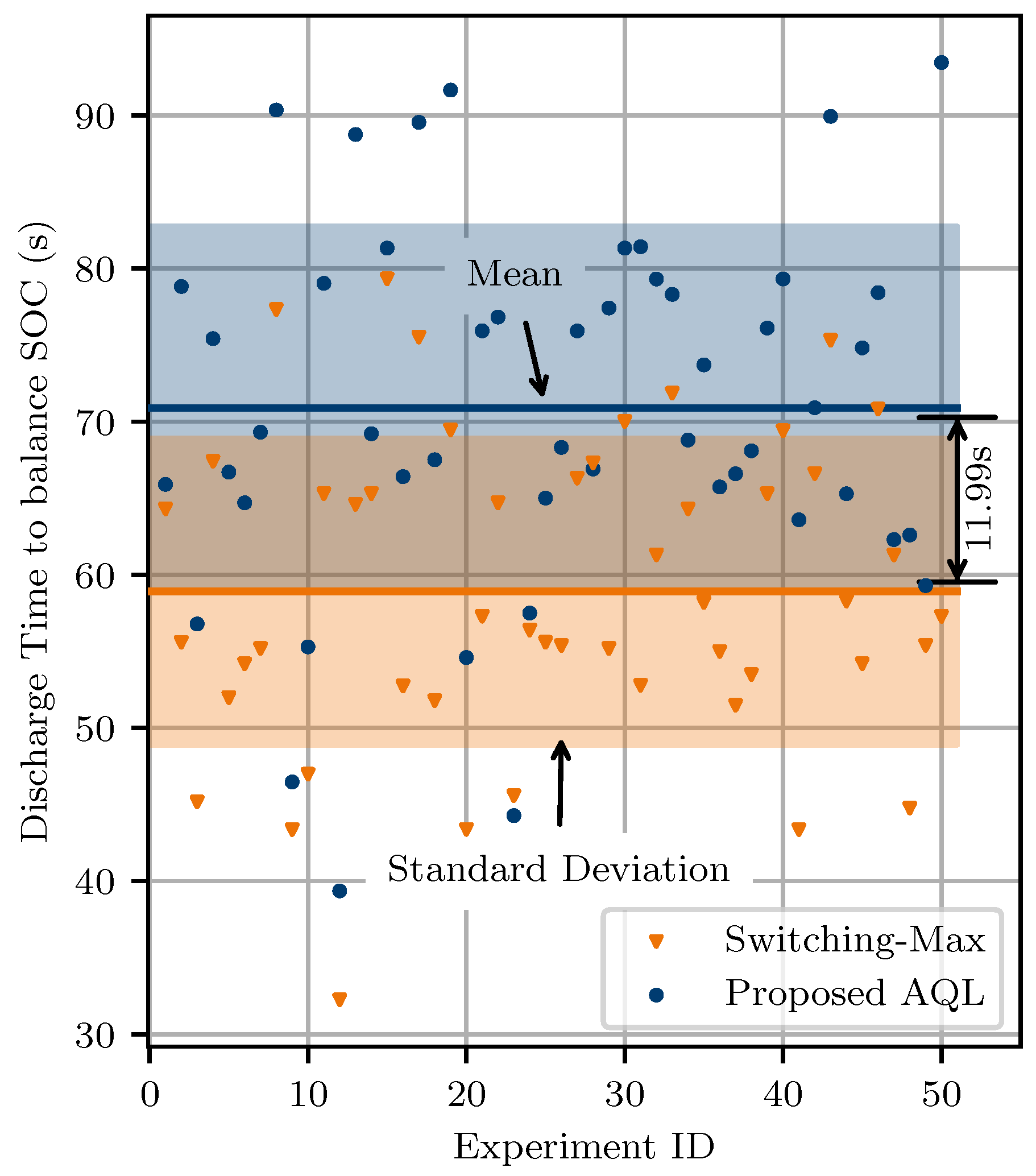
- The experimental evaluation of results with a 12-cell half-bridge converter system and comparison with the balancing algorithm proposed by Zheng [30].
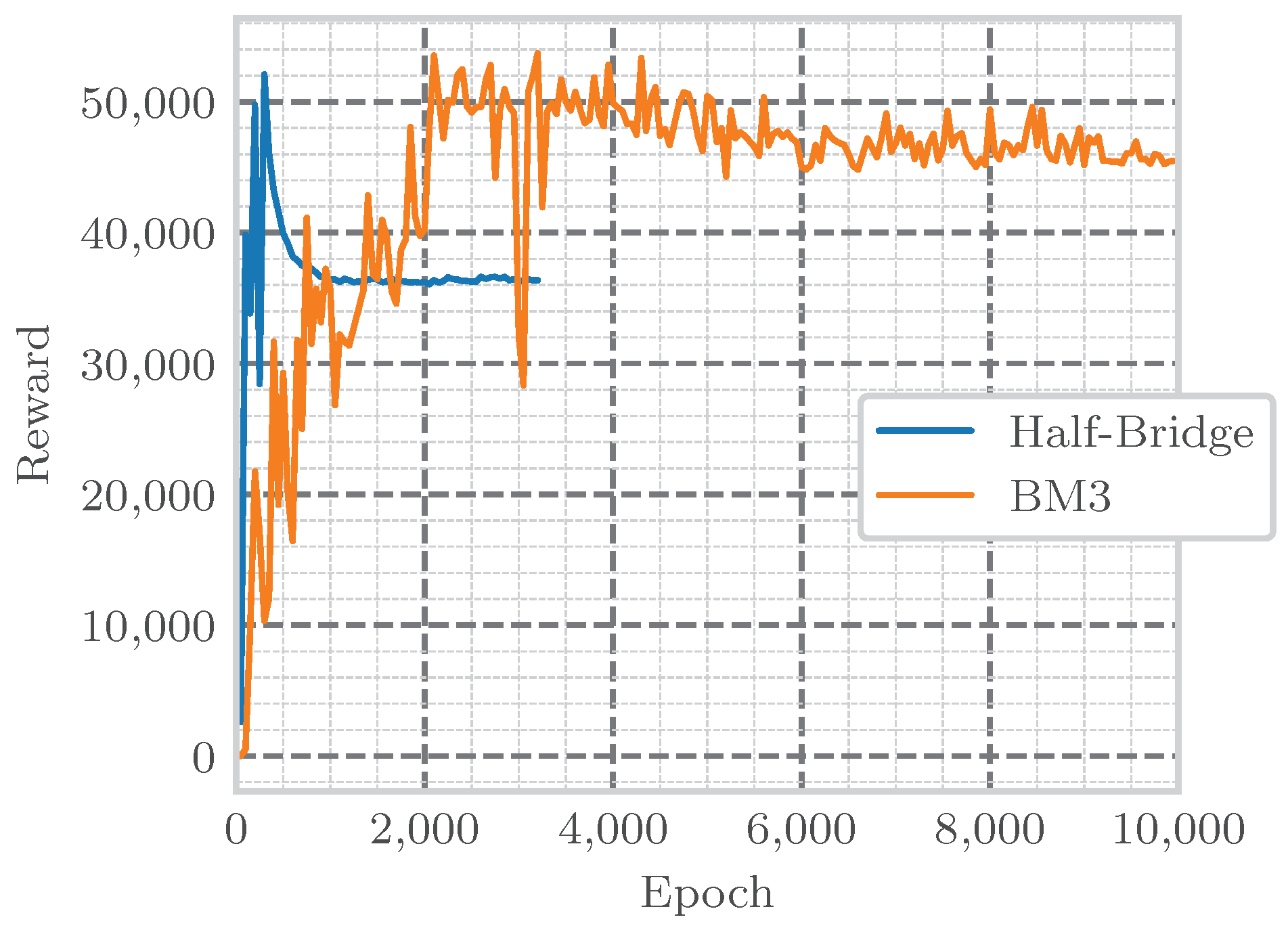
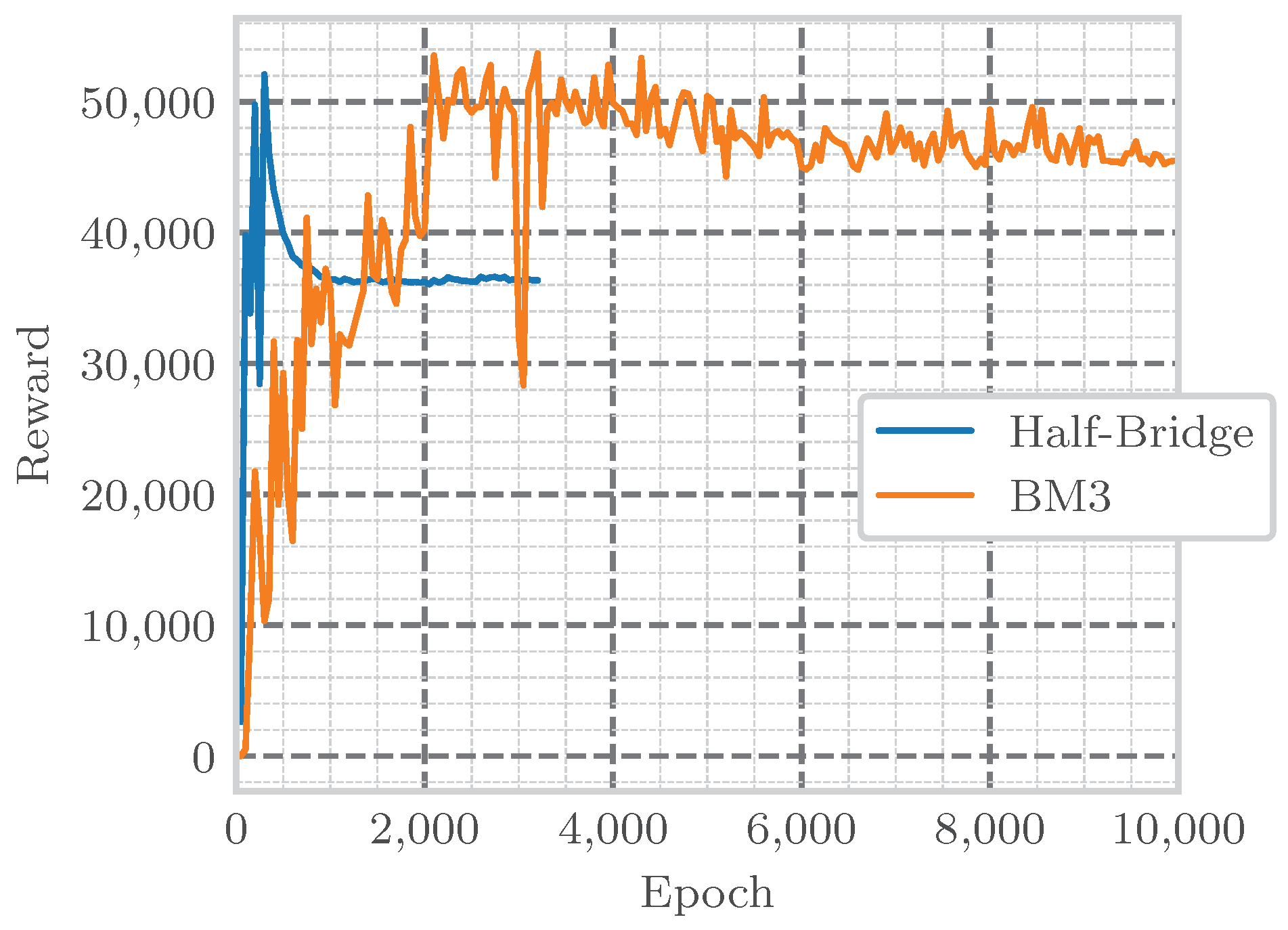
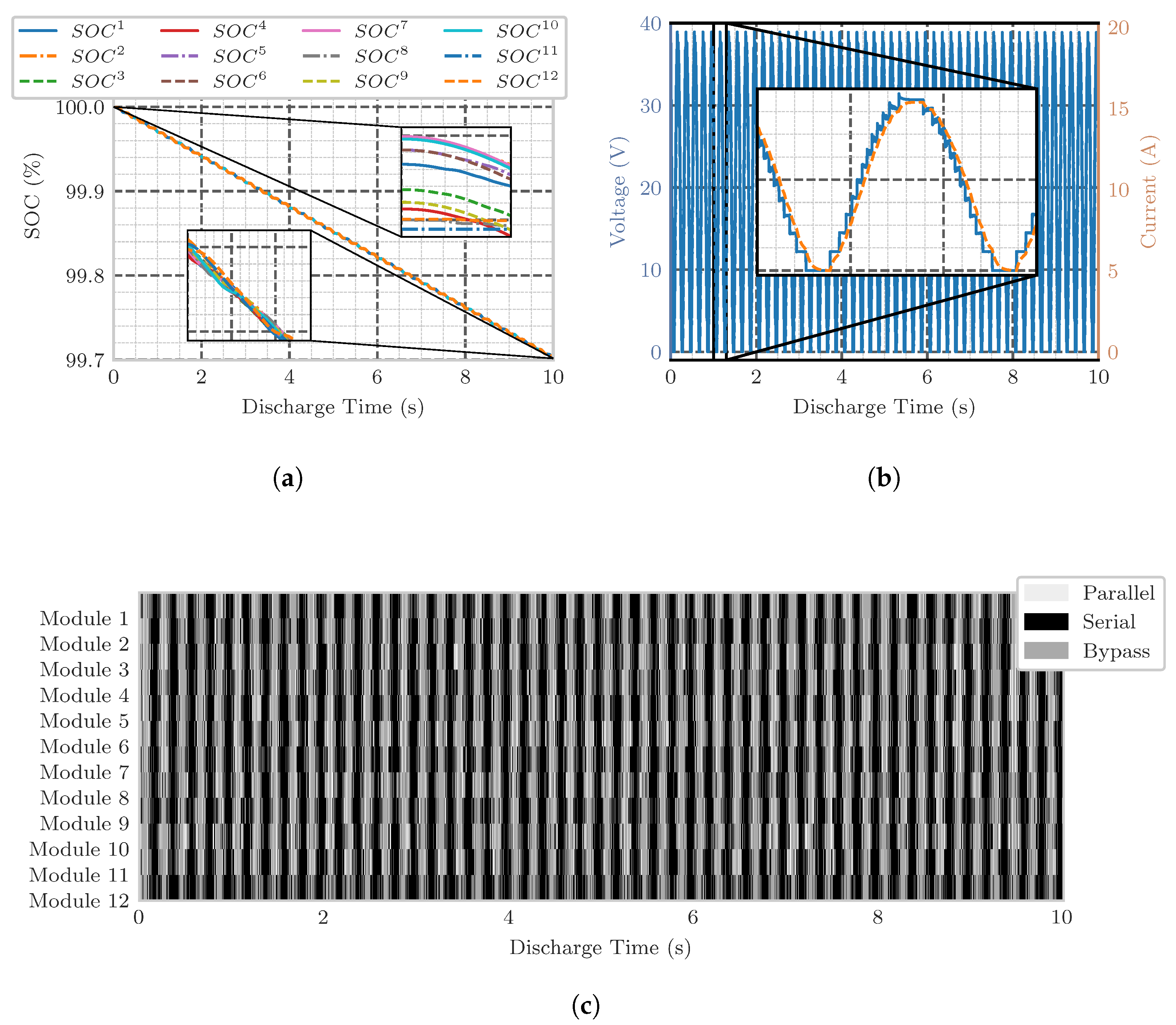
5.1. Simulative Evaluation
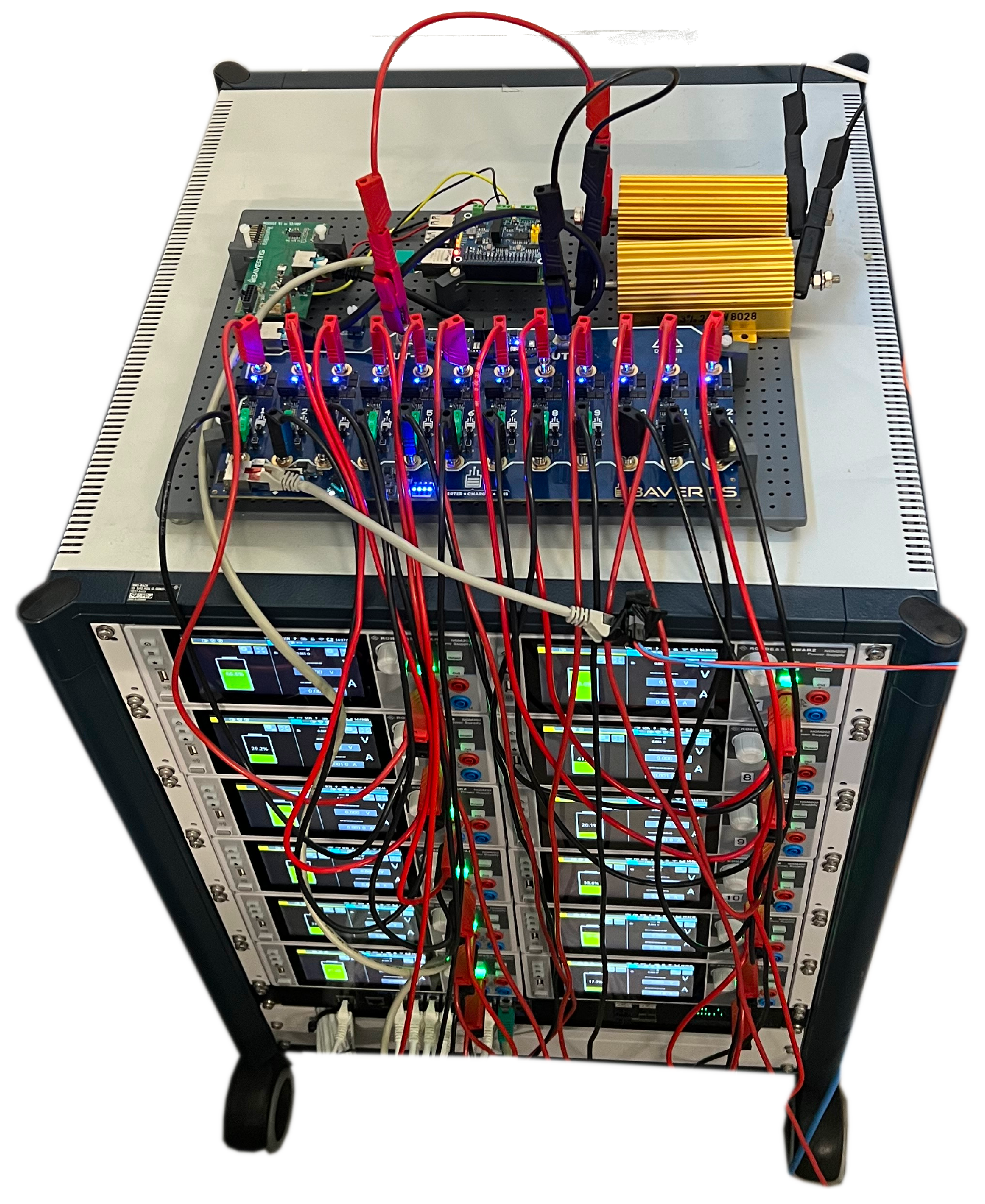
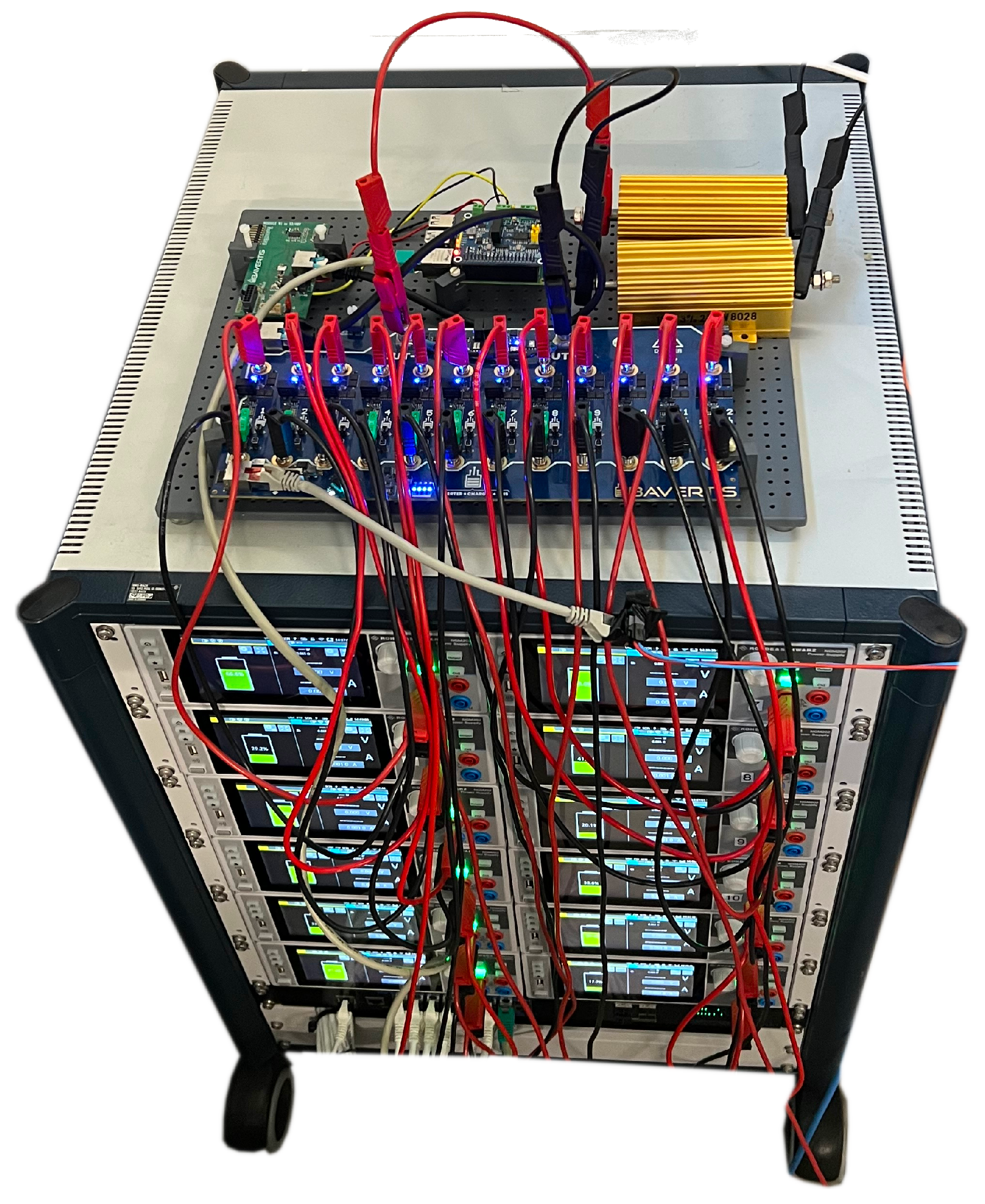
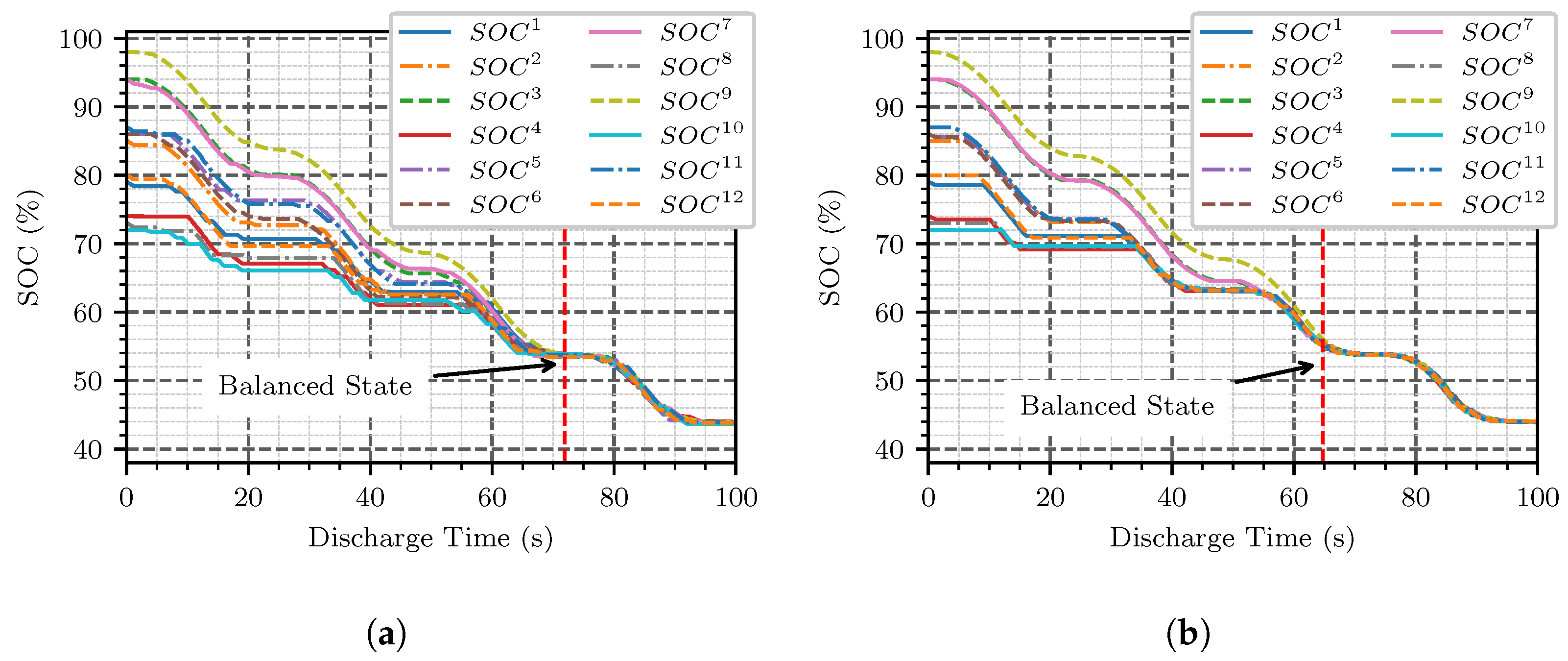
5.2. Experimental Evaluation
- DUT: 12-cell hybrid cascaded multilevel converter [30], a topology of interconnected half-bridge modules and an h-bridge converter, as a reconfigurable battery module;
- Raspberry Pi 4 (Raspberry Pi Foundation, Cambridge, UK) as the control unit;
- ThinkPad-P15-Gen-1 (Lenovo, Hong Kong, China) as the computing unit;
- Load resistor: MAL-200 MEG (MEGATRON Elektronik, Munich, Germany) 10 Ω in series;
- Battery cell simulator: NGM202 (Rohde and Schwarz, Munich, Germany) Power Supply.
6. Discussion
7. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AQL | Amortized Q-learning |
| AC | Alternating current |
| BM3 | Battery modular multilevel management |
| BMS | Battery Management System |
| DC | Direct Current |
| DUT | Device Under Test |
| DQN | Deep Q-Network |
| EVs | Electrical Vehicles |
| FNN | Feedforward Neural Network |
| MDP | Markov Decision Process |
| MOSFET | Metal-Oxide-Semiconductor Field-Effect Transistor |
| MMI | Modular Multilevel Inverter |
| MMC | Modular Multilevel Converter |
| RL | Reinforcement learning |
| SoC | State of Charge |
| SoH | State of Health |
| SoT | State of Temperature |
References
- Gallardo-Lozano, J.; Romero-Cadaval, E.; Milanes-Montero, M.I.; Guerrero-Martinez, M.A. A novel active battery equalization control with on-line unhealthy cell detection and cell change decision. J. Power Sources 2015, 299, 356–370. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, L.; Hu, L.; Huang, C. Active cell balancing of lithium-ion battery pack based on average state of charge. Int. J. Energy Res. 2020, 44, 2535–2548. [Google Scholar] [CrossRef]
- Ghaeminezhad, N.; Ouyang, Q.; Hu, X.; Xu, G.; Wang, Z. Active Cell Equalization Topologies Analysis for Battery Packs: A Systematic Review. IEEE Trans. Power Electron. 2021, 36, 9119–9135. [Google Scholar] [CrossRef]
- Cao, Y.; Abu Qahouq, J.A. Hierarchical SOC Balancing Controller for Battery Energy Storage System. IEEE Trans. Ind. Electron. 2021, 68, 9386–9397. [Google Scholar] [CrossRef]
- Van, C.N.; Vinh, T.N.; Ngo, M.D.; Ahn, S.J. Optimal SoC Balancing Control for Lithium-Ion Battery Cells Connected in Series. Energies 2021, 14, 2875. [Google Scholar] [CrossRef]
- Jung, J.H.; Hosseini, E.; Liserre, M.; Fernández-Ramírez, L.M. Reinforcement Learning Based Modulation for Balancing Capacitor Voltage and Thermal Stress to Enhance Current Capability of MMCs. In Proceedings of the 2022 IEEE 13th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Kiel, Germany, 26–29 June 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Tang, Y.; Hu, W.; Cao, D.; Hou, N.; Li, Y.; Chen, Z.; Blaabjerg, F. Artificial Intelligence-Aided Minimum Reactive Power Control for the DAB Converter Based on Harmonic Analysis Method. IEEE Trans. Power Electron. 2021, 36, 9704–9710. [Google Scholar] [CrossRef]
- Tang, Y.; Hu, W.; Xiao, J.; Chen, Z.; Huang, Q.; Chen, Z.; Blaabjerg, F. Reinforcement Learning Based Efficiency Optimization Scheme for the DAB DC–DC Converter with Triple-Phase-Shift Modulation. IEEE Trans. Ind. Electron. 2021, 68, 7350–7361. [Google Scholar] [CrossRef]
- Tashakor, N.; Li, Z.; Goetz, S.M. A generic scheduling algorithm for low-frequency switching in modular multilevel converters with parallel functionality. IEEE Trans. Power Electron. 2020, 36, 2852–2863. [Google Scholar] [CrossRef]
- Kristjansen, M.; Kulkarni, A.; Jensen, P.G.; Teodorescu, R.; Larsen, K.G. Dual Balancing of SoC/SoT in Smart Batteries Using Reinforcement Learning in Uppaal Stratego. In Proceedings of the IECON 2023-49th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 16–19 October 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Mashayekh, A.; Kersten, A.; Kuder, M.; Estaller, J.; Khorasani, M.; Buberger, J.; Eckerle, R.; Weyh, T. Proactive SoC Balancing Strategy for Battery Modular Multilevel Management (BM3) Converter Systems and Reconfigurable Batteries. In Proceedings of the 2021 23rd European Conference on Power Electronics and Applications (EPE’21 ECCE Europe), Ghent, Belgium, 6–10 September 2021; pp. P.1–P.10. [Google Scholar] [CrossRef]
- Huang, H.; Ghias, A.M.; Acuna, P.; Dong, Z.; Zhao, J.; Reza, M.S. A fast battery balance method for a modular-reconfigurable battery energy storage system. Appl. Energy 2024, 356, 122470. [Google Scholar] [CrossRef]
- Han, W.; Zou, C.; Zhang, L.; Ouyang, Q.; Wik, T. Near-fastest battery balancing by cell/module reconfiguration. IEEE Trans. Smart Grid 2019, 10, 6954–6964. [Google Scholar] [CrossRef]
- McGrath, B.P.; Holmes, D.G.; Kong, W.Y. A decentralized controller architecture for a cascaded H-bridge multilevel converter. IEEE Trans. Ind. Electron. 2013, 61, 1169–1178. [Google Scholar] [CrossRef]
- Xu, B.; Tu, H.; Du, Y.; Yu, H.; Liang, H.; Lukic, S. A distributed control architecture for cascaded H-bridge converter with integrated battery energy storage. IEEE Trans. Ind. Appl. 2020, 57, 845–856. [Google Scholar] [CrossRef]
- Pinter, Z.M.; Papageorgiou, D.; Rohde, G.; Marinelli, M.; Træholt, C. Review of Control Algorithms for Reconfigurable Battery Systems with an Industrial Example. In Proceedings of the 2021 56th International Universities Power Engineering Conference (UPEC), Middlesbrough, UK, 31 August–3 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Morstyn, T.; Momayyezan, M.; Hredzak, B.; Agelidis, V.G. Distributed control for state-of-charge balancing between the modules of a reconfigurable battery energy storage system. IEEE Trans. Power Electron. 2015, 31, 7986–7995. [Google Scholar] [CrossRef]
- Jiang, B.; Tang, J.; Liu, Y.; Boscaglia, L. Active Balancing of Reconfigurable Batteries Using Reinforcement Learning Algorithms. In Proceedings of the 2023 IEEE Transportation Electrification Conference & Expo (ITEC), Detroit, MI, USA, 21–23 June 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Kuder, M.; Schneider, J.; Kersten, A.; Thiringer, T.; Eckerle, R.; Weyh, T. Battery modular multilevel management (bm3) converter applied at battery cell level for electric vehicles and energy storages. In Proceedings of the PCIM Europe Digital Days 2020; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 7–8 July 2020; pp. 1–8. [Google Scholar]
- Stevenson, A.; Tariq, M.; Sarwat, A. Reduced Operational Inhomogeneities in a Reconfigurable Parallelly-Connected Battery Pack Using DQN Reinforcement Learning Technique. In Proceedings of the 2023 IEEE Transportation Electrification Conference & Expo (ITEC), Detroit, MI, USA, 21–23 June 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Mashayekh, A.; Pohlmann, S.; Estaller, J.; Kuder, M.; Lesnicar, A.; Eckerle, R.; Weyh, T. Multi-Agent Reinforcement Learning-Based Decentralized Controller for Battery Modular Multilevel Inverter Systems. Electricity 2023, 4, 235–252. [Google Scholar] [CrossRef]
- Yang, F.; Gao, F.; Liu, B.; Ci, S. An adaptive control framework for dynamically reconfigurable battery systems based on deep reinforcement learning. IEEE Trans. Ind. Electron. 2022, 69, 12980–12987. [Google Scholar] [CrossRef]
- Yang, X.; Liu, P.; Liu, F.; Liu, Z.; Wang, D.; Zhu, J.; Wei, T. A DOD-SOH balancing control method for dynamic reconfigurable battery systems based on DQN algorithm. Front. Energy Res. 2023, 11, 1333147. [Google Scholar] [CrossRef]
- Karnehm, D.; Pohlmann, S.; Neve, A. State-of-Charge (SoC) Balancing of Battery Modular Multilevel Management (BM3) Converter using Q-Learning. In Proceedings of the 15th Annual IEEE Green Technologies (GreenTech) Conference, Denver, CO, USA, 19–21 April 2023. [Google Scholar]
- Sutton, R.; Barto, A. Reinforcement learning: An introduction 1st edition. Exp. Psychol. Learn. Mem. Cogn. 1998, 30, 1302–1321. [Google Scholar]
- Jang, B.; Kim, M.; Harerimana, G.; Kim, J.W. Q-Learning Algorithms: A Comprehensive Classification and Applications. IEEE Access 2019, 7, 133653–133667. [Google Scholar] [CrossRef]
- Mirchevska, B.; Hügle, M.; Kalweit, G.; Werling, M.; Boedecker, J. Amortized Q-learning with Model-based Action Proposals for Autonomous Driving on Highways. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 1028–1035. [Google Scholar] [CrossRef]
- Van de Wiele, T.; Warde-Farley, D.; Mnih, A.; Mnih, V. Q-Learning in enormous action spaces via amortized approximate maximization. Technical Report. arXiv 2020, arXiv:2001.08116. [Google Scholar]
- Karnehm, D.; Sorokina, N.; Pohlmann, S.; Mashayekh, A.; Kuder, M.; Gieraths, A. A High Performance Simulation Framework for Battery Modular Multilevel Management Converter. In Proceedings of the 2022 International Conference on Smart Energy Systems and Technologies (SEST), Eindhoven, The Netherlands, 5–7 September 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, K.; Xu, L.; Li, Y. A Hybrid Cascaded Multilevel Converter for Battery Energy Management Applied in Electric Vehicles. IEEE Trans. Power Electron. 2014, 29, 3537–3546. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Half-Bridge | |||
| Bypass | on | off | - |
| Series | off | on | - |
| BM3 | |||
| Bypass | on | off | off |
| Series | off | on | off |
| Parallel | on | off | on |
| Layers | Model |
|---|---|
| Input Layer | Dense (24) |
| Hidden Layer 1 | Dense (128) |
| ReLU | |
| Dropout(0.1) | |
| Hidden Layer 2 | Dense (64) |
| ReLU | |
| Dropout (0.1) | |
| Hidden Layer 3 | Dense (32) |
| ReLU | |
| Dropout (0.1) | |
| Output Layer | Dense (1) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karnehm, D.; Bliemetsrieder, W.; Pohlmann, S.; Neve, A. Controlling Algorithm of Reconfigurable Battery for State of Charge Balancing Using Amortized Q-Learning. Batteries 2024, 10, 131. https://doi.org/10.3390/batteries10040131
Karnehm D, Bliemetsrieder W, Pohlmann S, Neve A. Controlling Algorithm of Reconfigurable Battery for State of Charge Balancing Using Amortized Q-Learning. Batteries. 2024; 10(4):131. https://doi.org/10.3390/batteries10040131
Chicago/Turabian StyleKarnehm, Dominic, Wolfgang Bliemetsrieder, Sebastian Pohlmann, and Antje Neve. 2024. "Controlling Algorithm of Reconfigurable Battery for State of Charge Balancing Using Amortized Q-Learning" Batteries 10, no. 4: 131. https://doi.org/10.3390/batteries10040131
APA StyleKarnehm, D., Bliemetsrieder, W., Pohlmann, S., & Neve, A. (2024). Controlling Algorithm of Reconfigurable Battery for State of Charge Balancing Using Amortized Q-Learning. Batteries, 10(4), 131. https://doi.org/10.3390/batteries10040131