
Stretchable, Flexible, Breathable, Self-Adhesive Epidermal Hand sEMG Sensor System

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Fabrication of the Epidermal Hand sEMG Sensors
2.2. FEA of Mechanical Properties
2.3. Characterizations of Electrical Properties
2.4. In Vitro Evaluation of Cell Biocompatibility
3. Result
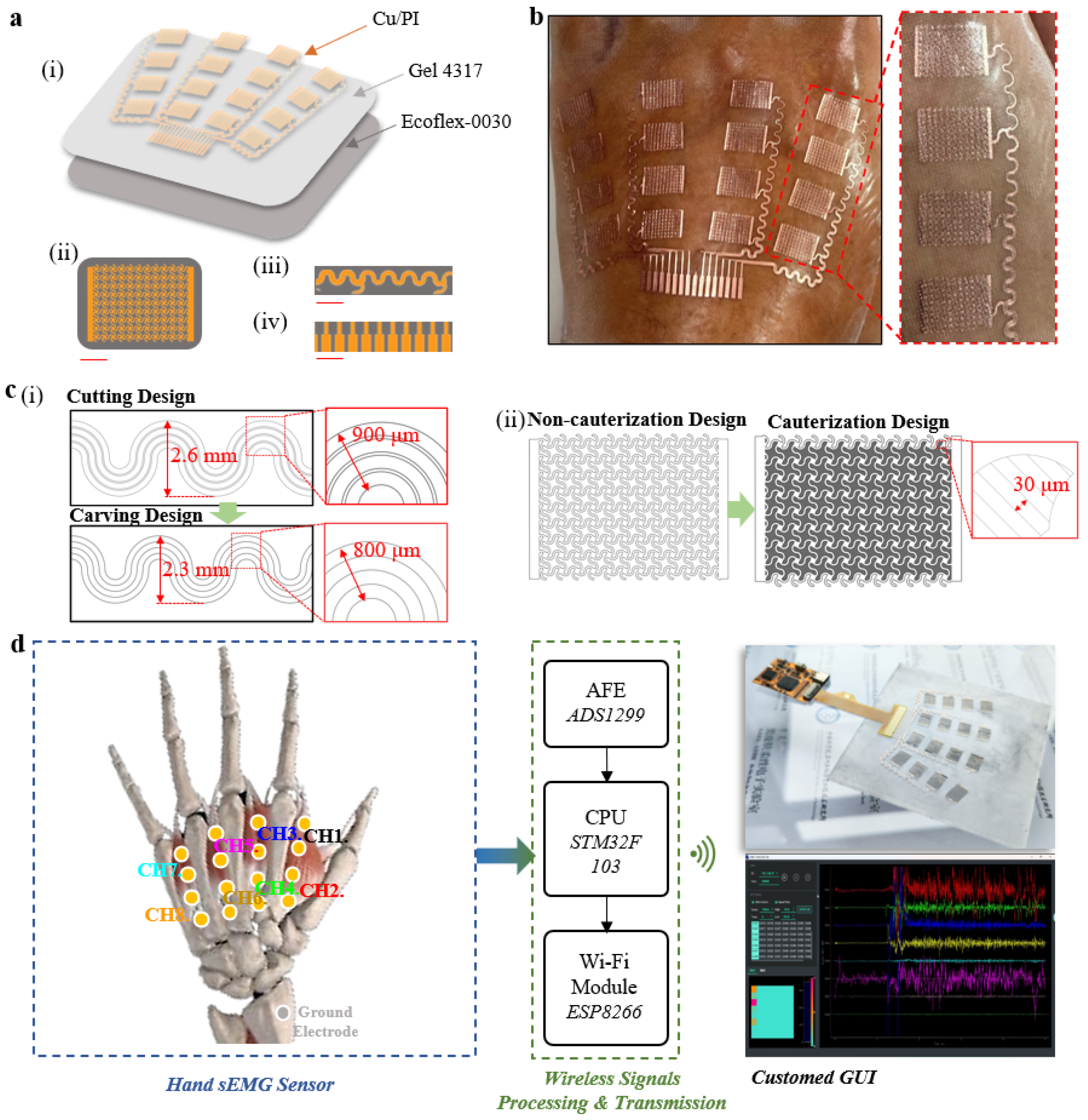
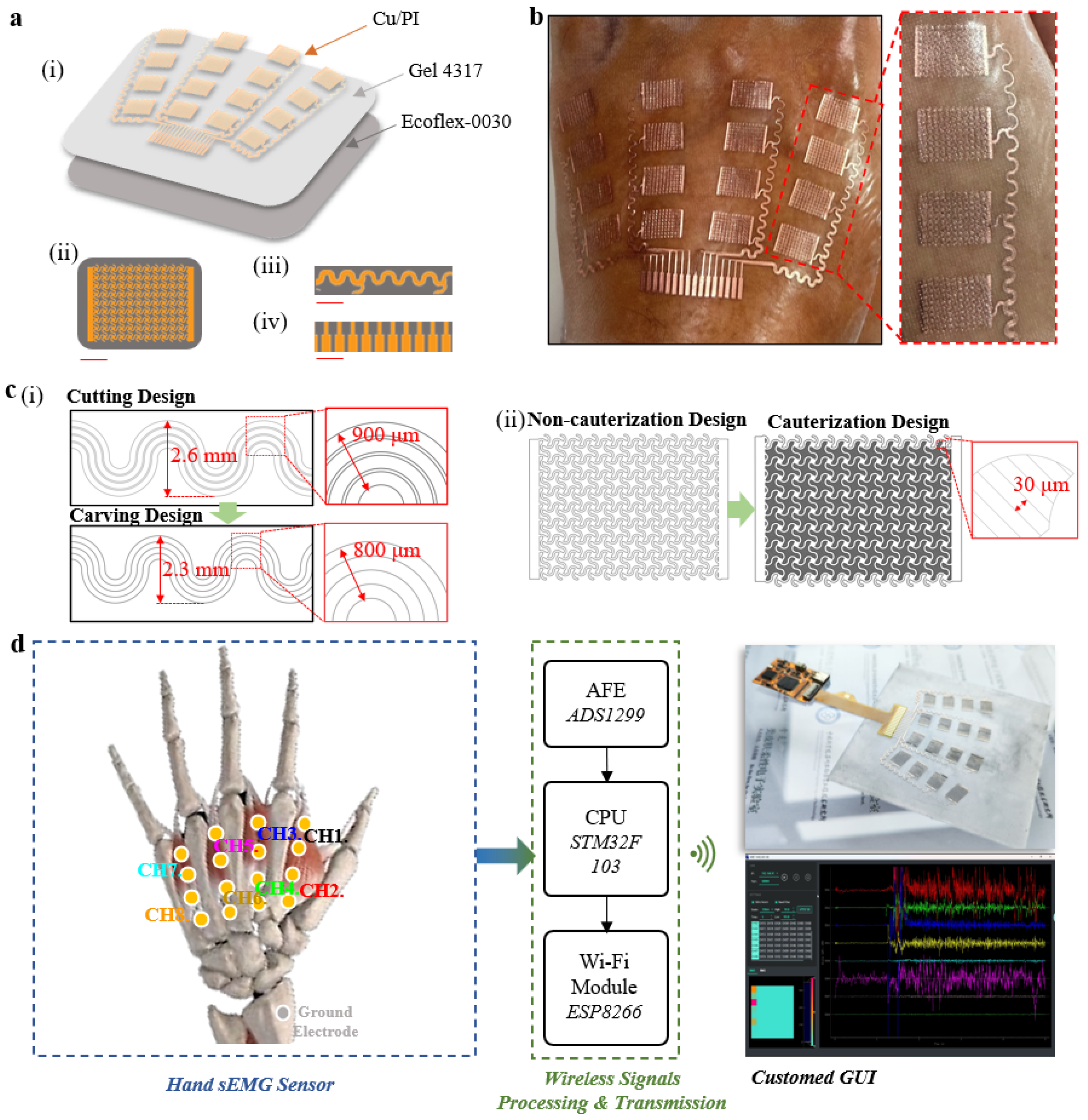
3.1. Design for Epidermal Hand sEMG Sensor System
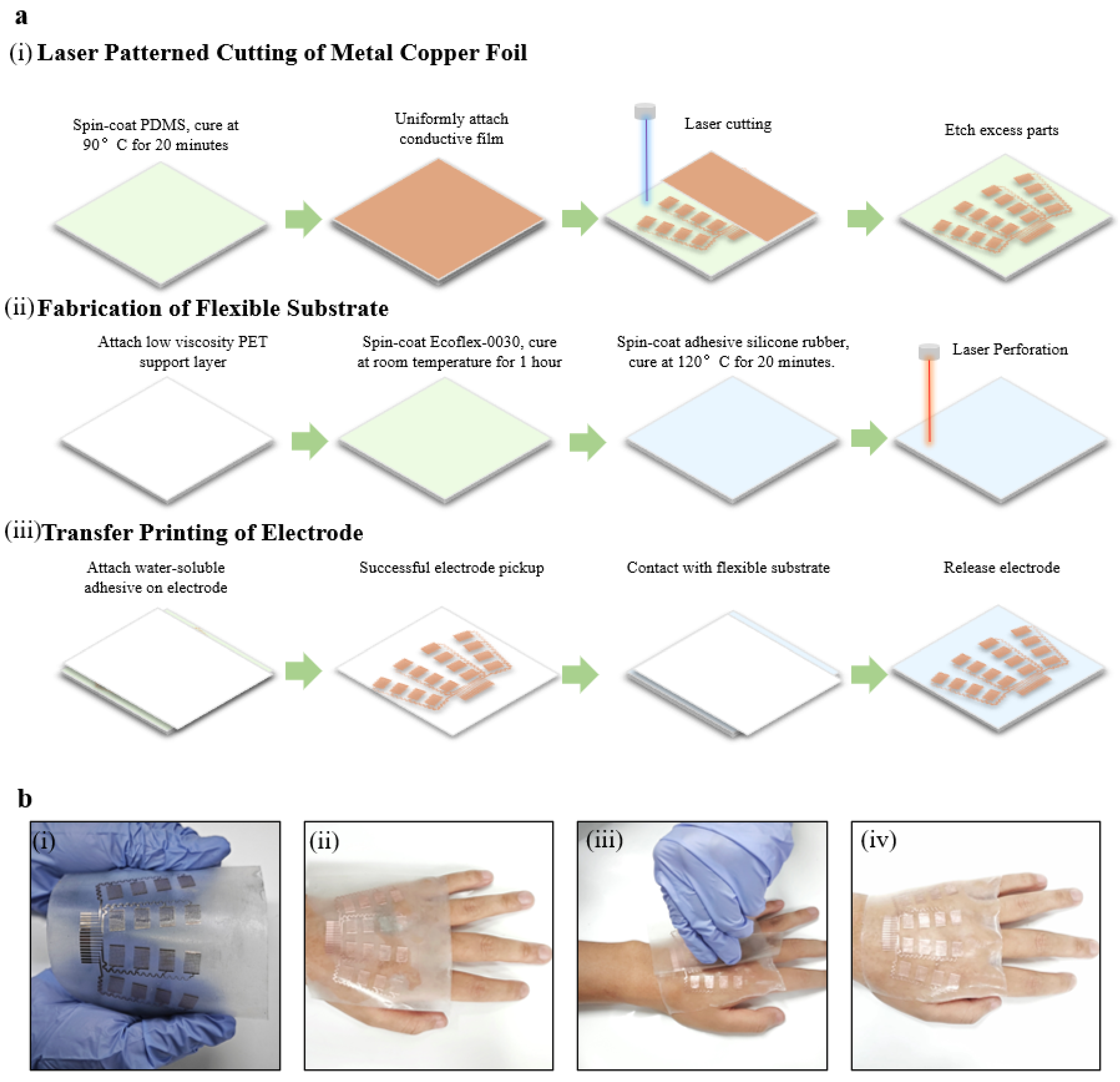
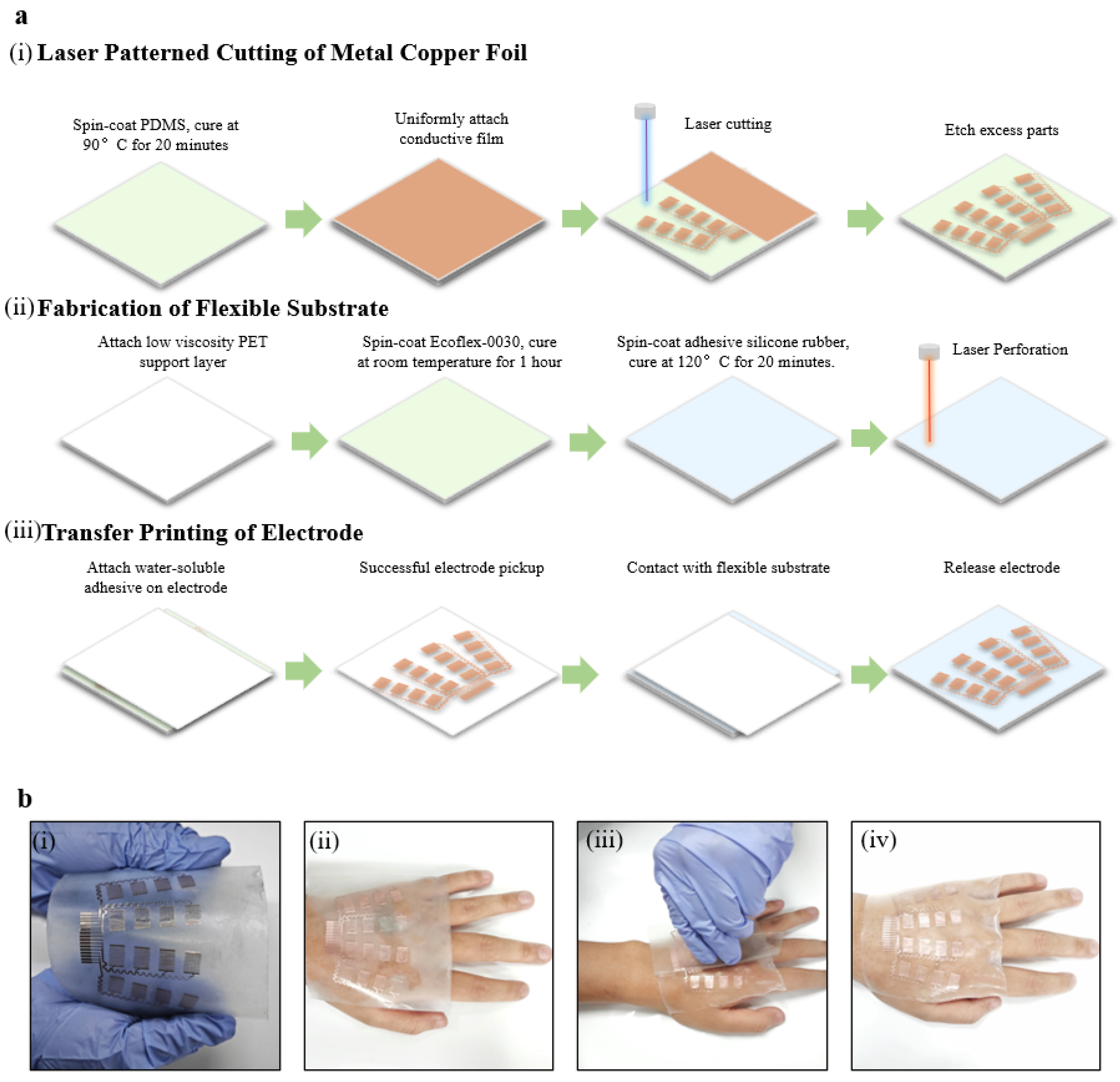
3.2. Fabrication and Wearing of Epidermal Hand sEMG Sensors
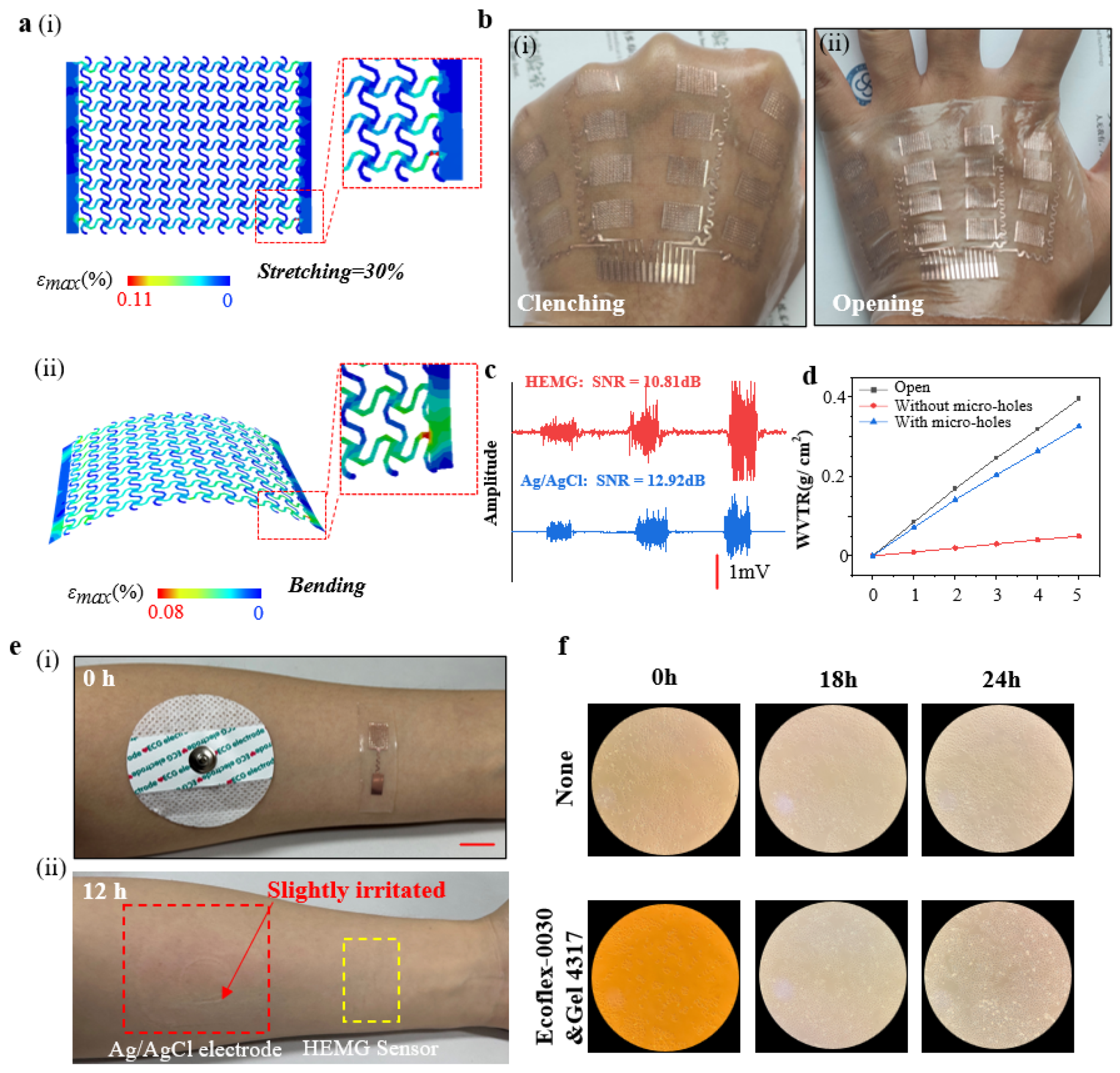
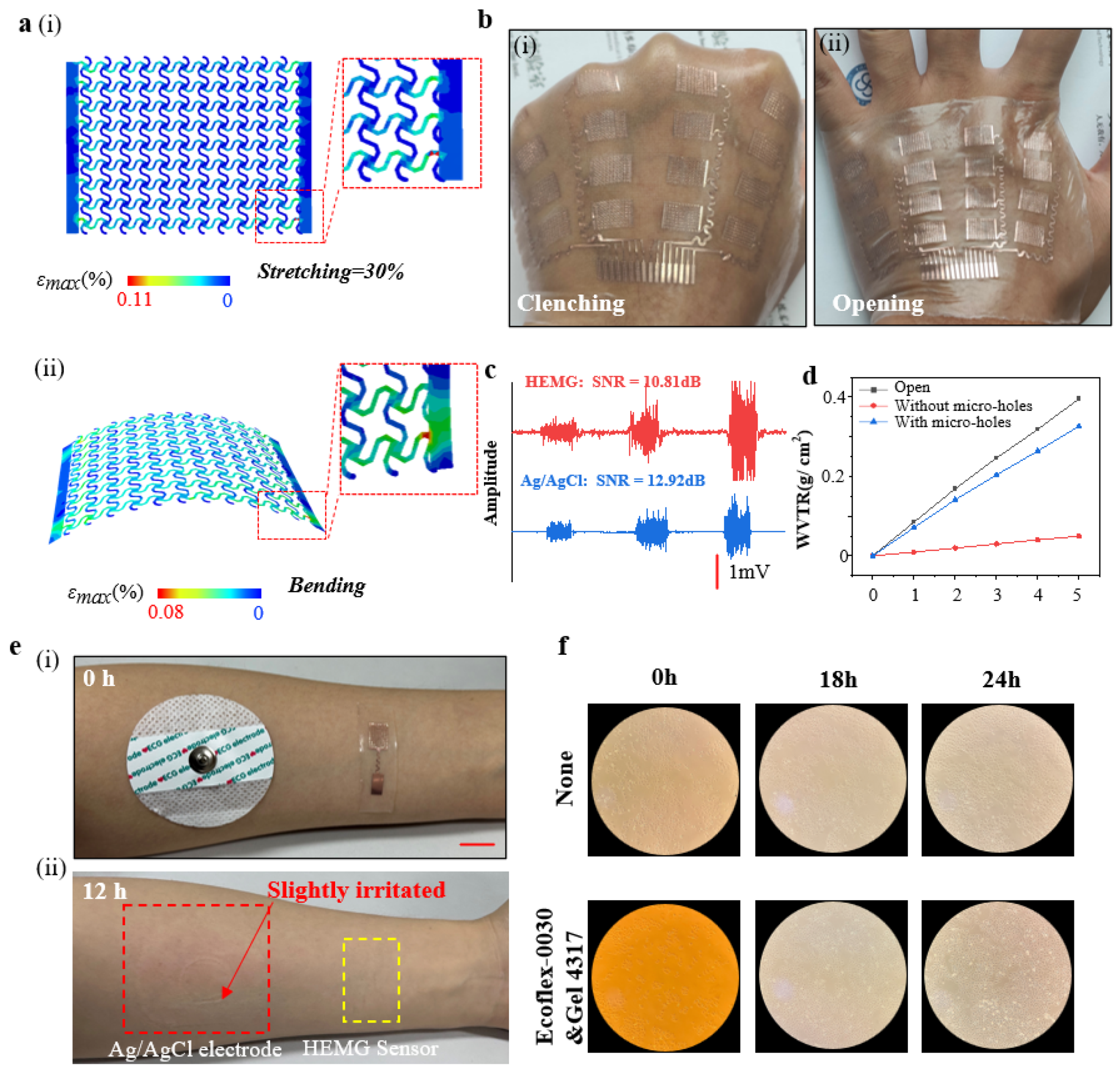
3.3. Mechanical, Electrical, and Biocompatibility Performance of Epidermal Hand sEMG Sensors
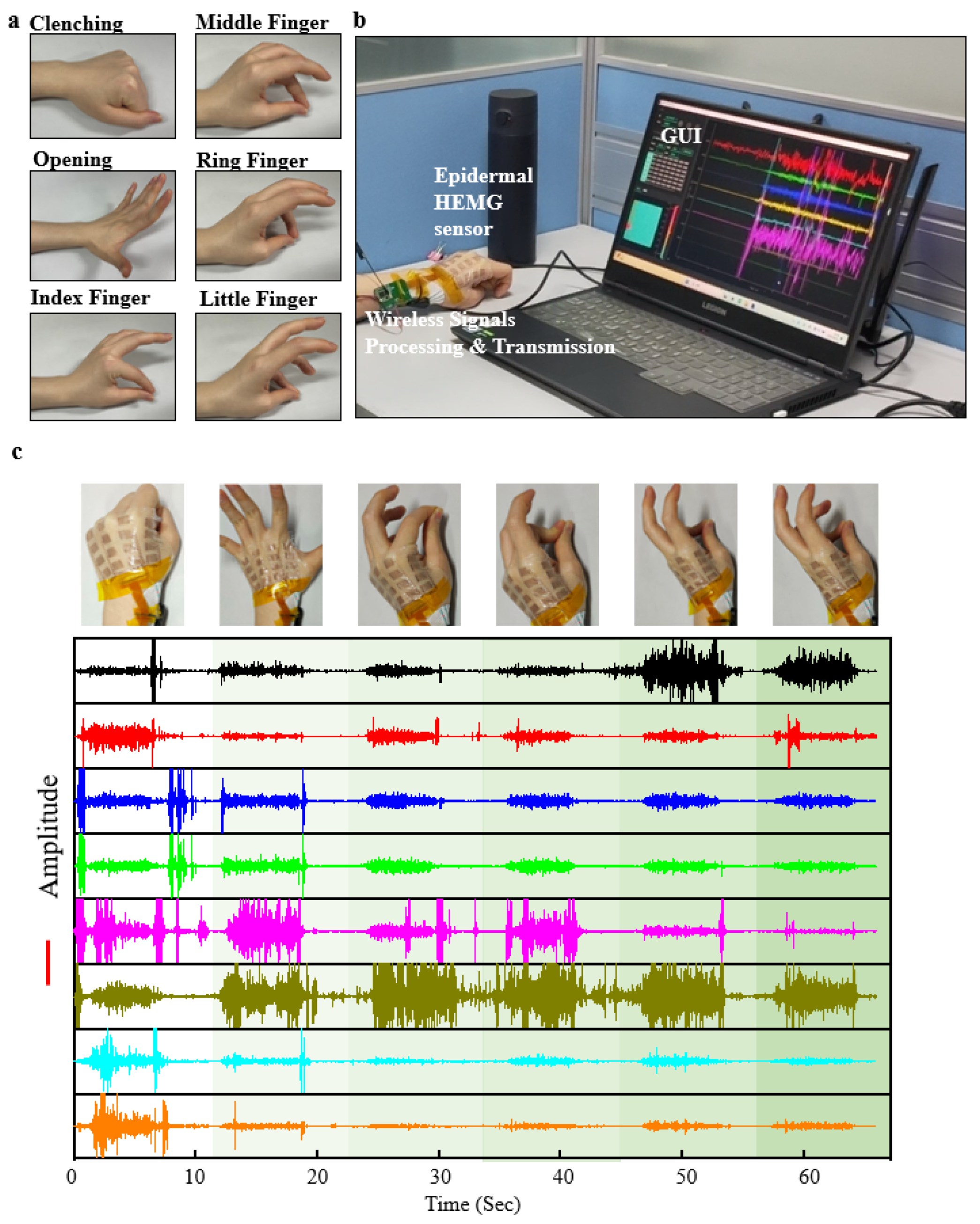
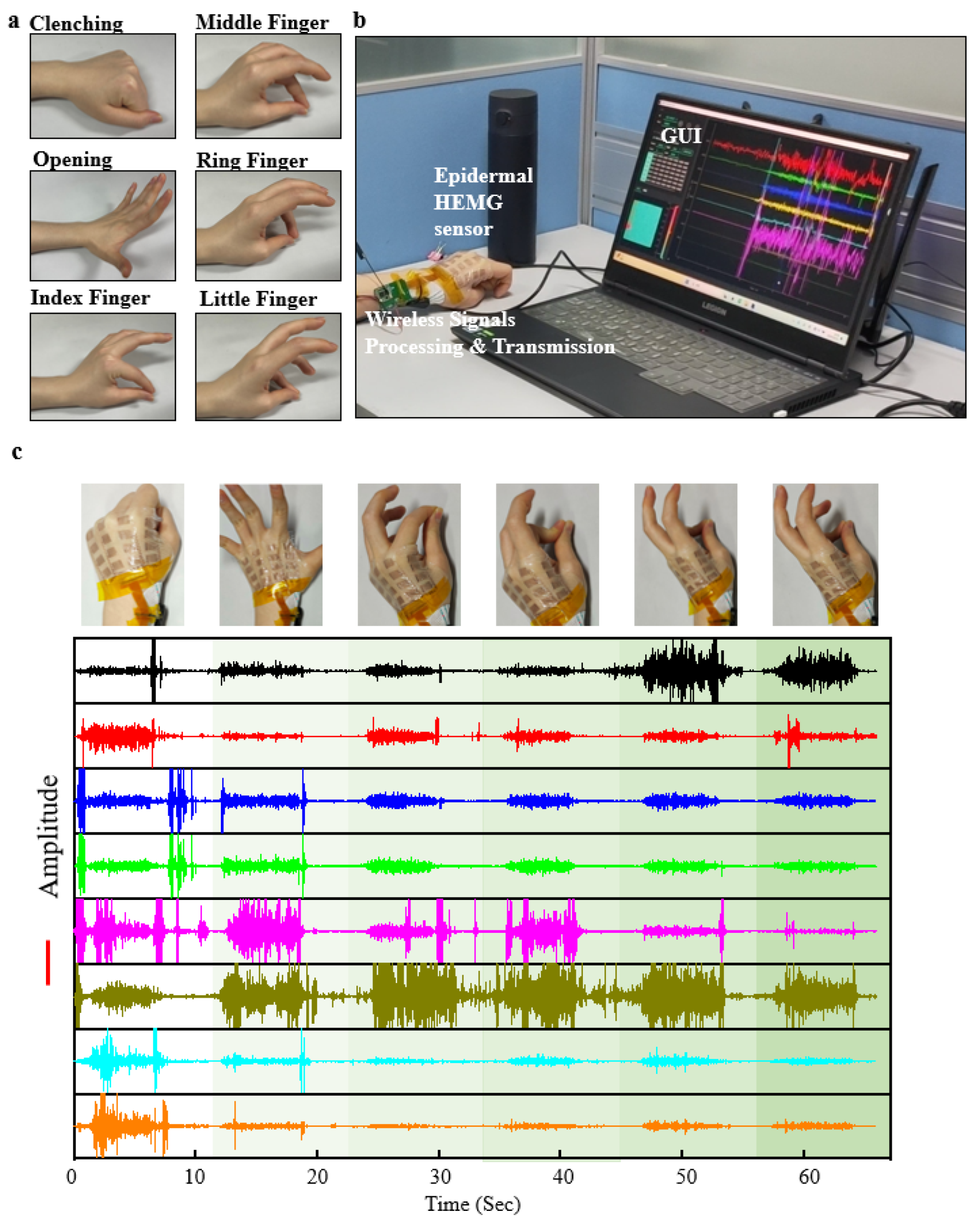
3.4. Signal Acquisition Applications of Epidermal Hand sEMG Sensors
4. Discussion
- (1)
- The sensor adopts a circular structure design with stretchability, flexibility, and a high metal filling rate. This improves the scalability and signal acquisition ability of the electromyographic sensor. The process design of laser engraving ensures the maximum electrode reserve size, further optimizing the performance of the sensor.
- (2)
- The sensor adopts a multi-layer strategy combined with a low modulus, high viscosity, and biocompatible materials. At the same time, the CO2 laser micro-holes treatment allows the sensor to seamlessly and breathably combine with the skin, avoiding irritation and allergic reactions to the skin. These characteristics help optimize the signal-to-noise ratio of sensors, improve signal quality, and maintain user comfort.
- (3)
- The sensors and their manufacturing processes proposed in this article are lower cost, and the cauterization design reduces labor costs and improves the fabrication success rate, which makes it easy to manufacture on a large scale, thus promoting the possibility of their widespread application.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, S.; Guo, S.; Gao, B.; Huang, Q.; Pang, M.; Hirata, H.; Ishihara, H. Muscle strength assessment system using sEMG-based force prediction method for wrist joint. J. Med. Biol. Eng. 2016, 36, 121–131. [Google Scholar] [CrossRef]
- Lulic-Kuryllo, T.; Negro, F.; Jiang, N.; Dickerson, C.R. Standard bipolar surface EMG estimations mischaracterize pectoralis major activity in commonly performed tasks. J. Electromyogr. Kinesiol. 2021, 56, 102509. [Google Scholar] [CrossRef]
- Ma, K.; Chen, Y.; Zhang, X.; Zheng, H.; Yu, S.; Cai, S.; Xie, L. sEMG-based trunk compensation detection in rehabilitation training. Front. Neurosci. 2019, 13, 1250. [Google Scholar] [CrossRef] [PubMed]
- Cai, S.; Chen, Y.; Huang, S.; Wu, Y.; Zheng, H.; Li, X.; Xie, L. SVM-based classification of sEMG signals for upper-limb self-rehabilitation training. Front. Neurorobot. 2019, 13, 31. [Google Scholar] [CrossRef]
- Wang, L.; Li, H.; Wang, Z.; Meng, F. Study on upper limb rehabilitation system based on surface EMG. Bio-Med. Mater. Eng. 2015, 26 (Suppl. S1), S795–S801. [Google Scholar] [CrossRef] [PubMed]
- Khoshdel, V.; Akbarzadeh, A.; Naghavi, N.; Sharifnezhad, A.; Souzanchi-Kashani, M. sEMG-based impedance control for lower-limb rehabilitation robot. Intell. Serv. Robot. 2018, 11, 97–108. [Google Scholar] [CrossRef]
- Gao, B.; Wei, C.; Ma, H.; Yang, S.; Ma, X.; Zhang, S. Real-time evaluation of the signal processing of sEMG used in limb exoskeleton rehabilitation system. Appl. Bionics Biomech. 2018, 2018, 1391032. [Google Scholar] [CrossRef]
- Xiong, D.; Zhang, D.; Zhao, X.; Zhao, Y. Deep learning for EMG-based human-machine interaction: A review. IEEE/CAA J. Autom. Sin. 2021, 8, 512–533. [Google Scholar] [CrossRef]
- Simao, M.; Mendes, N.; Gibaru, O.; Neto, P. A review on electromyography decoding and pattern recognition for human-machine interaction. IEEE Access 2019, 7, 39564–39582. [Google Scholar] [CrossRef]
- Sayin, F.S., Ozen, S., Baspinar, U., Eds.; Hand gesture recognition by using sEMG signals for human machine interaction applications. In Proceedings of the 2018 Signal Processing: Algorithms, Architectures, Arrangements, and Applications (SPA), Poznan, Poland, 19–21 September 2018. [Google Scholar]
- Meattini, R.; Benatti, S.; Scarcia, U.; De Gregorio, D.; Benini, L.; Melchiorri, C. An sEMG-based human–robot interface for robotic hands using machine learning and synergies. IEEE Trans. Compon. 2018, 8, 1149–1158. [Google Scholar] [CrossRef]
- Disselhorst-Klug, C.; Schmitz-Rode, T.; Rau, G. Surface electromyography and muscle force: Limits in sEMG–force relationship and new approaches for applications. Clin. Biomech. 2009, 24, 225–235. [Google Scholar] [CrossRef]
- Arjunan, S.P.; Kumar, D.K.; Naik, G. Computation and evaluation of features of surface electromyogram to identify the force of muscle contraction and muscle fatigue. BioMed Res. Int. 2014, 2014, 197960. [Google Scholar] [CrossRef]
- Jang, M.H.; Ahn, S.J.; Lee, J.W.; Rhee, M.-H.; Chae, D.; Kim, J.; Shin, M.J. Validity and reliability of the newly developed surface electromyography device for measuring muscle activity during voluntary isometric contraction. Comput. Math. Methods Med. 2018, 2018, 4068493. [Google Scholar] [CrossRef] [PubMed]
- Rogers, D.R.; MacIsaac, D.T. A comparison of EMG-based muscle fatigue assessments during dynamic contractions. J. Electromyogr. Kinesiol. 2013, 23, 1004–1011. [Google Scholar] [CrossRef]
- Del Toro, S.F.; Santos-Cuadros, S.; Olmeda, E.; Álvarez-Caldas, C.; Díaz, V.; San Román, J.L. Is the use of a low-cost sEMG sensor valid to measure muscle fatigue? Sensors 2019, 19, 3204. [Google Scholar] [CrossRef]
- González-Izal, M.; Malanda, A.; Gorostiaga, E.; Izquierdo, M. Electromyographic models to assess muscle fatigue. J. Electromyogr. Kinesiol. 2012, 22, 501–512. [Google Scholar] [CrossRef]
- Hug, F. Can muscle coordination be precisely studied by surface electromyography? J. Electromyogr. Kinesiol. 2011, 21, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Tu, P.; Li, J.; Wang, H.; Li, Y.; Xiang, W. A Novel Lower-Limb Coordination Assessment Scheme Using Multi-Scale Nonlinear Coupling Characteristics with sEMG. IEEE Trans. Instrum. Meas. 2023, 72, 1–11. [Google Scholar] [CrossRef]
- Svendsen, J.H.; Samani, A.; Mayntzhusen, K.; Madeleine, P. Muscle coordination and force variability during static and dynamic tracking tasks. Hum. Mov. Sci. 2011, 30, 1039–1051. [Google Scholar] [CrossRef]
- Sbriccoli, P.; Felici, F.; Rosponi, A.; Aliotta, A.; Castellano, V.; Mazza, C.; Bernardi, M.; Marchetti, M. Exercise induced muscle damage and recovery assessed by means of linear and non-linear sEMG analysis and ultrasonography. J. Electromyogr. Kinesiol. 2001, 11, 73–83. [Google Scholar] [CrossRef]
- Héroux, M.E.; Butler, A.A.; Gandevia, S.C.; Taylor, J.L.; Butler, J.E. Time course of human motoneuron recovery after sustained low-level voluntary activity. J. Neurophysiol. 2016, 115, 803–812. [Google Scholar] [CrossRef] [PubMed]
- Roy, S.H.; Cheng, M.S.; Chang, S.-S.; Moore, J.; De Luca, G.; Nawab, S.H.; De Luca, C.J. A combined sEMG and accelerometer system for monitoring functional activity in stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2009, 17, 585–594. [Google Scholar] [CrossRef]
- Zhou, Y.; Fang, Y.; Gui, K.; Li, K.; Zhang, D.; Liu, H. sEMG bias-driven functional electrical stimulation system for upper-limb stroke rehabilitation. IEEE Sens. J. 2018, 18, 6812–6821. [Google Scholar] [CrossRef]
- Chen, M., Cheng, L., Huang, F., Yan, Y., Hou, Z.-G., Eds.; Towards robot-assisted post-stroke hand rehabilitation: Fugl-Meyer gesture recognition using sEMG. In Proceedings of the 2017 IEEE 7th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Honolulu, HI, USA, 31 July–4 August 2017. [Google Scholar]
- Balbinot, G.; Wiest, M.J.; Li, G.; Pakosh, M.; Furlan, J.C.; Kalsi-Ryan, S.; Zariffa, J. The use of surface EMG in neurorehabilitation following traumatic spinal cord injury: A scoping review. Clin. Neurophysiol. 2022, 138, 61–73. [Google Scholar] [CrossRef] [PubMed]
- Meattini, R.; Caporali, A.; Bernardini, A.; Palli, G.; Melchiorri, C. Self-Supervised Regression Of sEMG Signals Combining Non-Negative Matrix Factorization with Deep Neural Networks for Robot Hand Multiple Grasping Motion Control. IEEE Robot. Autom. Lett. 2023, 8, 8533–8540. [Google Scholar] [CrossRef]
- Biagiotti, L.; Meattini, R.; Chiaravalli, D.; Palli, G.; Melchiorri, C. Robot Programming by Demonstration: Trajectory Learning Enhanced by sEMG-Based User Hand Stiffness Estimation. IEEE Trans. Robot. 2023, 39, 3259–3278. [Google Scholar] [CrossRef]
- Vangi, M.; Brogi, C.; Topini, A.; Secciani, N.; Ridolfi, A. Enhancing sEMG-Based Finger Motion Prediction with CNN-LSTM Regressors for Controlling a Hand Exoskeleton. Machines 2023, 11, 747. [Google Scholar] [CrossRef]
- Diao, Y.; Chen, Q.; Liu, Y.; He, L.; Sun, Y.; Li, X.; Chen, Y.; Li, G.; Zhao, G. A fuzzy granular logistic regression algorithm for sEMG-based cross-individual prosthetic hand gesture classification. J. Neural Eng. 2023, 20, 026029. [Google Scholar] [CrossRef]
- Chen, C.; Chai, G.; Guo, W.; Sheng, X.; Farina, D.; Zhu, X. Prediction of finger kinematics from discharge timings of motor units: Implications for intuitive control of myoelectric prostheses. J. Neural Eng. 2019, 16, 026005. [Google Scholar] [CrossRef]
- Hu, X.; Song, A.; Wang, J.; Zeng, H.; Wei, W. Finger movement recognition via high-density electromyography of intrinsic and extrinsic hand muscles. Sci. Data 2022, 9, 373. [Google Scholar] [CrossRef]
- Rogers, J.A.; Someya, T.; Huang, Y. Materials and mechanics for stretchable electronics. Science 2010, 327, 1603–1607. [Google Scholar] [CrossRef]
- Kim, D.-H.; Lu, N.; Ma, R.; Kim, Y.-S.; Kim, R.-H.; Wang, S.; Wu, J.; Won, S.M.; Tao, H.; Islam, A.; et al. Epidermal electronics. Science 2011, 333, 838–843. [Google Scholar] [CrossRef]
- Kim, D.-H.; Ahn, J.-H.; Choi, W.M.; Kim, H.-S.; Kim, T.-H.; Song, J.; Huang, Y.Y.; Liu, Z.; Lu, C.; Rogers, J.A. Stretchable and foldable silicon integrated circuits. Science 2008, 320, 507–511. [Google Scholar] [CrossRef] [PubMed]
- Kwon, S.; Kim, H.S.; Kwon, K.; Kim, H.; Kim, Y.S.; Lee, S.H.; Kwon, Y.-T.; Jeong, J.-W.; Trotti, L.M.; Duarte, A.; et al. At-home wireless sleep monitoring patches for the clinical assessment of sleep quality and sleep apnea. Sci. Adv. 2023, 9, eadg9671. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Song, Y.; Bo, X.; Min, J.; Pak, O.S.; Zhu, L.; Wang, M.; Tu, J.; Kogan, A.; Zhang, H.; et al. A laser-engraved wearable sensor for sensitive detection of uric acid and tyrosine in sweat. Nat. Biotechnol. 2020, 38, 217–224. [Google Scholar] [CrossRef] [PubMed]
- Jeong, J.-W.; Yeo, W.-H.; Akhtar, A.; Norton, J.J.; Kwack, Y.-J.; Li, S.; Jung, S.-Y.; Su, Y.; Lee, W.; Xia, J.; et al. Materials and optimized designs for human-machine interfaces via epidermal electronics. Adv. Mater. 2013, 25, 47. [Google Scholar] [CrossRef] [PubMed]
- Jang, K.-I.; Han, S.Y.; Xu, S.; Mathewson, K.E.; Zhang, Y.; Jeong, J.-W.; Kim, G.-T.; Webb, R.C.; Lee, J.W.; Dawidczyk, T.J.; et al. Rugged and breathable forms of stretchable electronics with adherent composite substrates for transcutaneous monitoring. Nat. Commun. 2014, 5, 4779. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Li, M.; Wu, J.; Kim, D.-H.; Lu, N.; Su, Y.; Kang, Z.; Huang, Y.; Rogers, J.A. Mechanics of epidermal electronics. J. Appl. Mech. 2012, 79, 03102. [Google Scholar] [CrossRef]
- Liu, S.; Shah, D.S.; Kramer-Bottiglio, R. Highly stretchable multilayer electronic circuits using biphasic gallium-indium. Nat. Mater. 2021, 20, 851–858. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Wang, S.; Wang, G.-J.N.; Zhu, C.; Luo, S.; Jin, L.; Gu, X.; Chen, S.; Feig, V.R.; To, J.W.F.; et al. Highly stretchable polymer semiconductor films through the nanoconfinement effect. Science 2017, 355, 59–64. [Google Scholar] [CrossRef]
- Wang, S.; Xu, J.; Wang, W.; Wang, G.-J.N.; Rastak, R.; Molina-Lopez, F.; Chung, J.W.; Niu, S.; Feig, V.R.; Lopez, J.; et al. Skin electronics from scalable fabrication of an intrinsically stretchable transistor array. Nature 2018, 555, 83–88. [Google Scholar] [CrossRef] [PubMed]
- Huang, S.; Liu, Y.; Zhao, Y.; Ren, Z.; Guo, C. Flexible electronics: Stretchable electrodes and their future. Adv. Funct. Mater. 2019, 29, 1805924. [Google Scholar] [CrossRef]
- Ottenio, M.; Tran, D.; Annaidh, A.N.; Gilchrist, M.D.; Bruyère, K. Strain rate and anisotropy effects on the tensile failure characteristics of human skin. J. Mech. Behav. Biomed. Mater. 2015, 41, 241–250. [Google Scholar] [CrossRef]
- Gruber, P.A.; Böhm, J.; Onuseit, F.; Wanner, A.; Spolenak, R.; Arzt, E. Size effects on yield strength and strain hardening for ultra-thin Cu films with and without passivation: A study by synchrotron and bulge test techniques. Acta Mater. 2008, 56, 2318–2335. [Google Scholar] [CrossRef]
- Balasubramanian, S.; Klein, J.; Burdet, E. Robot-assisted rehabilitation of hand function. Curr. Opin. Neurol. 2010, 23, 661–670. [Google Scholar] [CrossRef]
- Lum, P.S.; Godfrey, S.B.; Brokaw, E.B.; Holley, R.J.; Nichols, D. Robotic approaches for rehabilitation of hand function after stroke. Am. J. Phys. Med. Rehabil. 2012, 91, S242–S254. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, K.; Zhang, S.; Hu, X.; Li, J.; Zhang, Y.; Tong, Y.; Yang, H.; Guo, K. Stretchable, Flexible, Breathable, Self-Adhesive Epidermal Hand sEMG Sensor System. Bioengineering 2024, 11, 146. https://doi.org/10.3390/bioengineering11020146
Yang K, Zhang S, Hu X, Li J, Zhang Y, Tong Y, Yang H, Guo K. Stretchable, Flexible, Breathable, Self-Adhesive Epidermal Hand sEMG Sensor System. Bioengineering. 2024; 11(2):146. https://doi.org/10.3390/bioengineering11020146
Chicago/Turabian StyleYang, Kerong, Senhao Zhang, Xuhui Hu, Jiuqiang Li, Yingying Zhang, Yao Tong, Hongbo Yang, and Kai Guo. 2024. "Stretchable, Flexible, Breathable, Self-Adhesive Epidermal Hand sEMG Sensor System" Bioengineering 11, no. 2: 146. https://doi.org/10.3390/bioengineering11020146
APA StyleYang, K., Zhang, S., Hu, X., Li, J., Zhang, Y., Tong, Y., Yang, H., & Guo, K. (2024). Stretchable, Flexible, Breathable, Self-Adhesive Epidermal Hand sEMG Sensor System. Bioengineering, 11(2), 146. https://doi.org/10.3390/bioengineering11020146