
Identifying Key Issues in Integration of Autonomous Ships in Container Ports: A Machine-Learning-Based Systematic Literature Review


Abstract
1. Introduction
2. Literature Review
2.1. System Literature Review
2.2. Autonomous Ship
2.3. Topic Modelling
2.4. Research Questions
- RQ1:
- How does a machine-learning-based SLR compare to a human-based SLR?
- RQ2:
- What key issues can container ports face in integrating autonomous ships?
- RQ3:
- With a machine-learning-based SLR, what policy recommendations can be made?
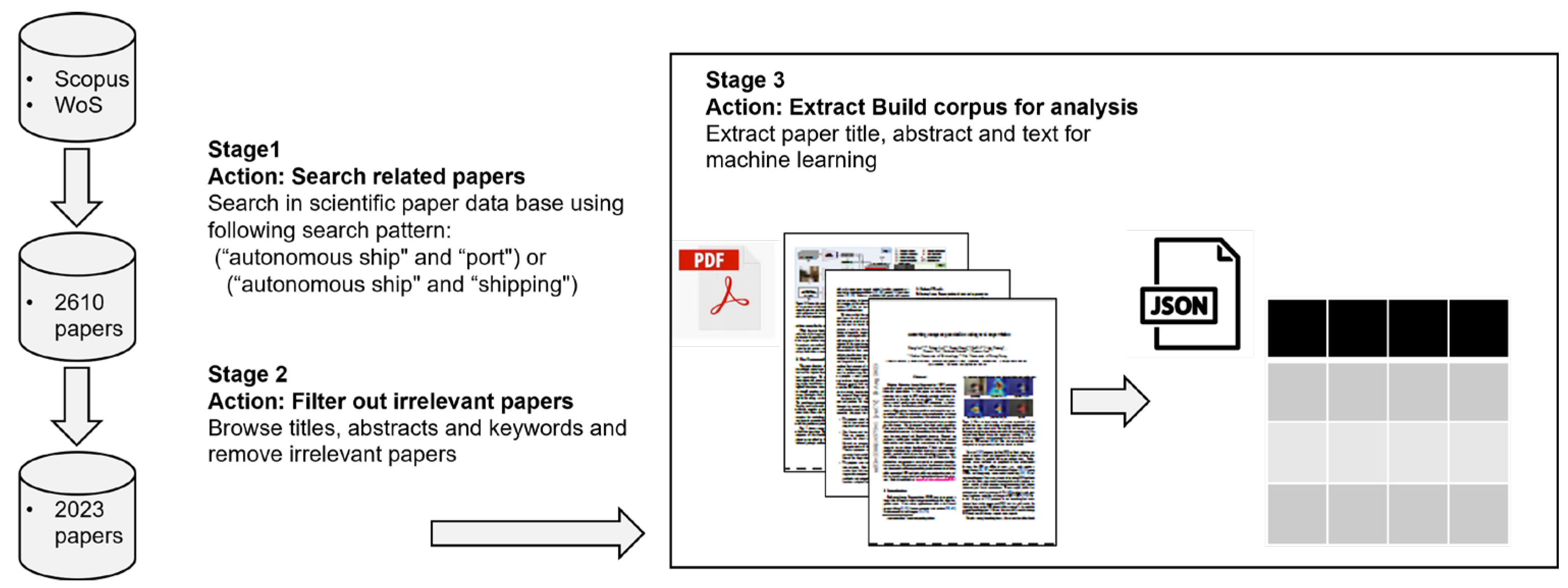
3. Literature Database Preparation
4. Methodology
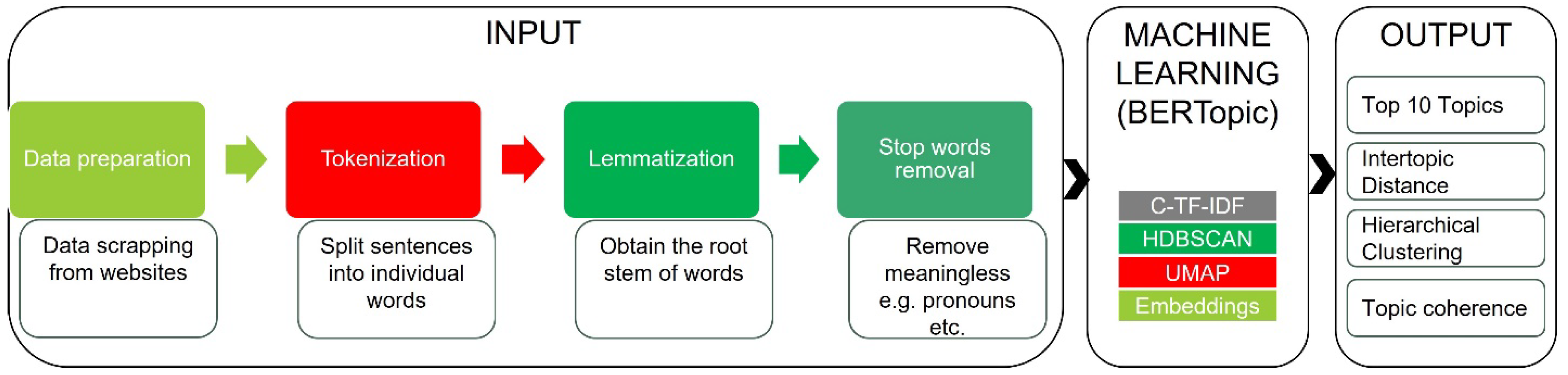
4.1. Analysis Process
4.2. Input Data
4.3. Training with BERTopic Model
4.3.1. Word Embedding
4.3.2. UMAP
4.3.3. HDBSCAN
4.3.4. C-TF-IDF
4.3.5. Fine-Tuning
5. Experiment Results
5.1. Top 10 Topics
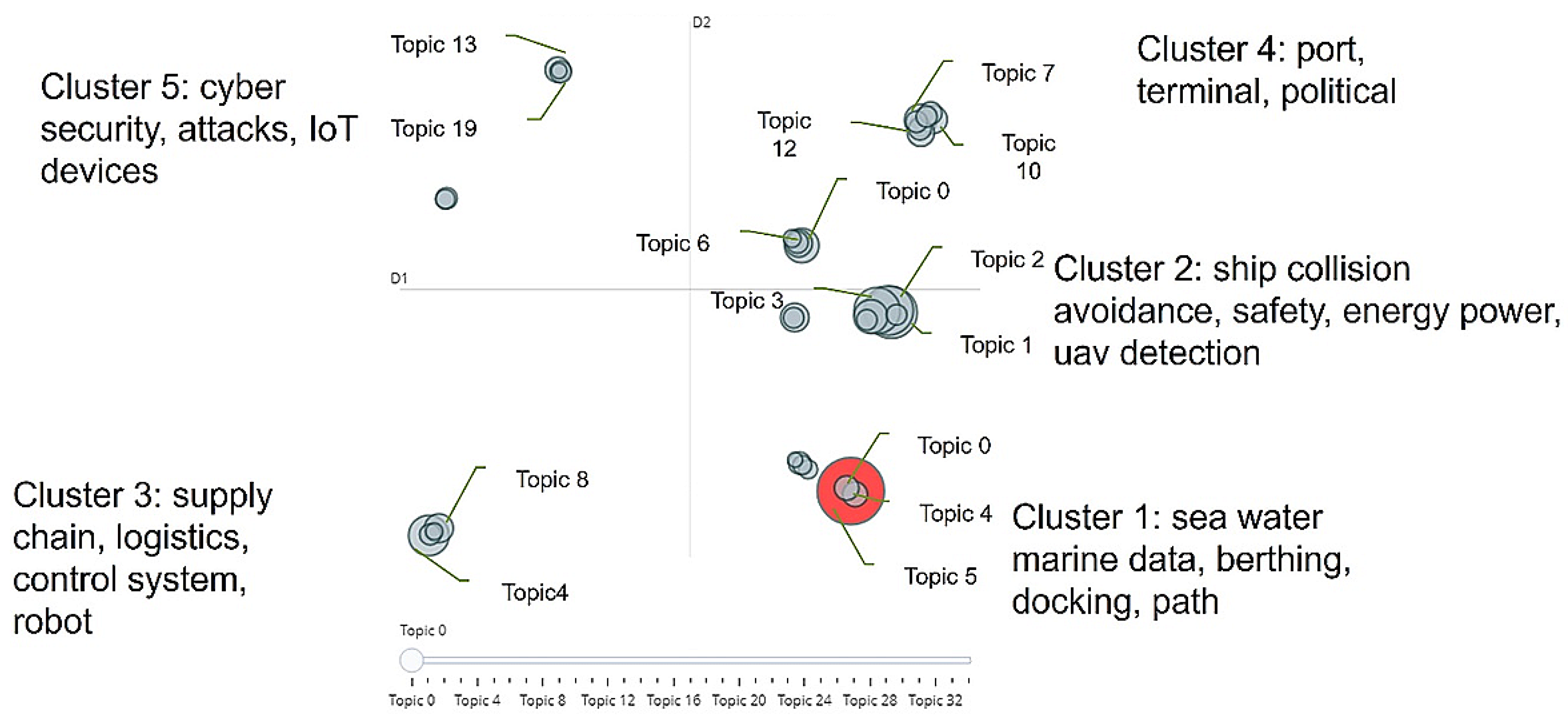
5.2. Relationships between Top Topics
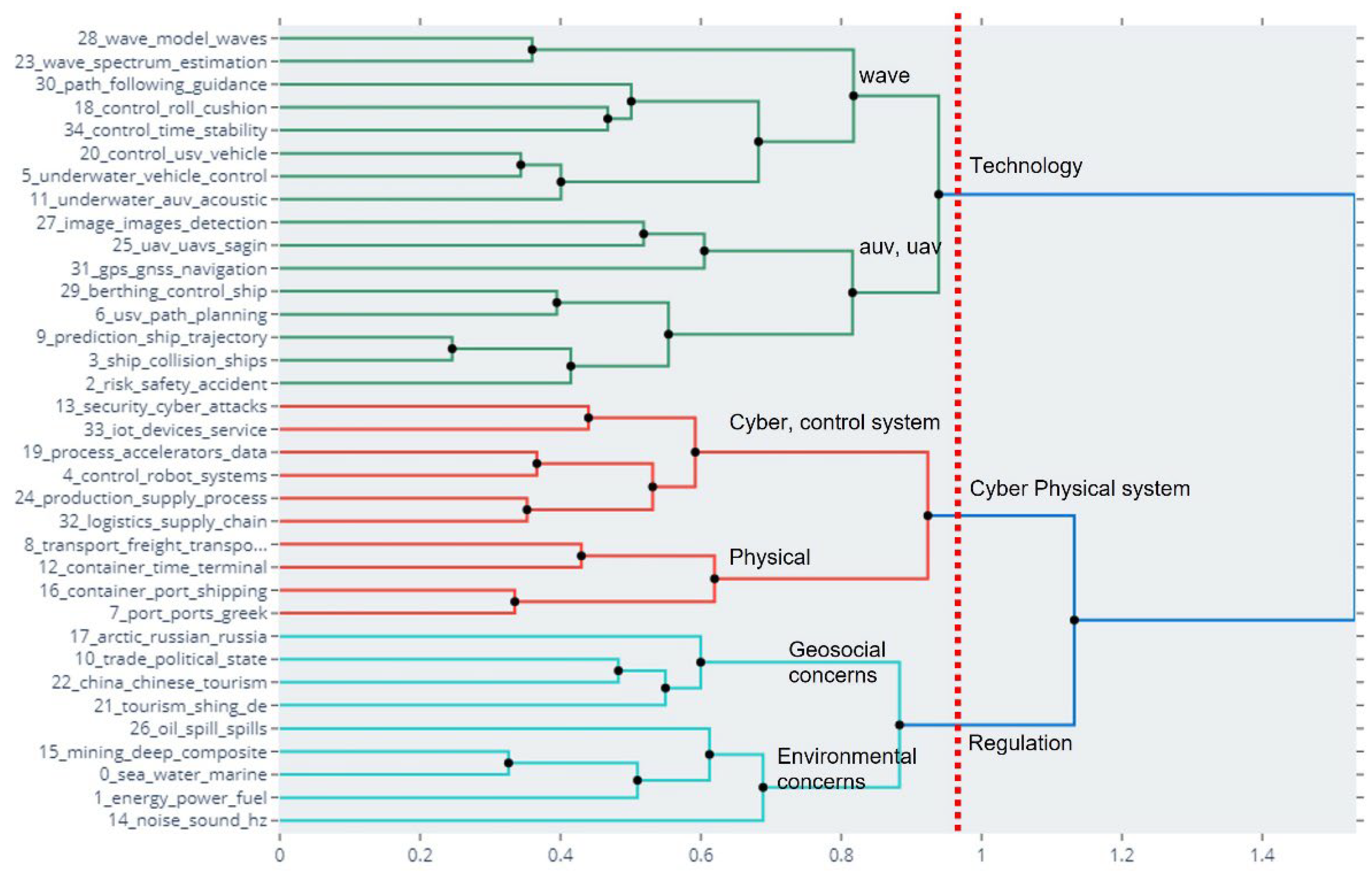
5.3. Hierarchical Groups
5.4. Performance Measurement
6. Discussion
6.1. Technology Dimensions
6.2. Cyber–Physical Systems Dimensions
6.3. Regulatory Dimensions
7. Conclusions
- (1)
- From a technology perspective, this review recommends supporting research and development of AUVs and UAVs, implementing comprehensive testing protocols for wave model systems.
- (2)
- From a cyber–physical system perspective, this review suggests the development of logistics, supply chain networks, and data governance, especially to protect data privacy and improve data security for data collected from IoT devices, and establish cybersecurity measures.
- (3)
- From a regulatory perspective, this review suggests the introduction of measures for environmental, geosocial, and liability aspects to handle emissions, employment, and accident handling issues.
- (1)
- The findings suggest the need to enhance support for research and development of AUVs and UAVs, establish safety standards, mandate testing of wave model evaluation systems, and promote international standardization.
- (2)
- To strengthen logistics and supply chain for autonomous ships in cyber–physical systems, it is necessary to establish data governance and strict control of IoT device data, as well as cybersecurity measures.
- (3)
- The investment in the infrastructures of logistics and supply chain network.
- (4)
- Environmental regulations require measures to address the environmental impact of autonomous ships.
- (5)
- Additionally, from a global social perspective, it is important to advance international agreements and clarify the legal framework in the event of an accident with regard to the pursuit of liability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gu, Y.; Goez, J.C.; Guajardo, M.; Wallace, S.W. Autonomous Vessels: State of the Art and Potential Opportunities in Logistics. Int. Trans. Oper. Res. 2021, 28, 1706–1739. [Google Scholar] [CrossRef]
- Ziajka-Poznańska, E.; Montewka, J. Costs and Benefits of Autonomous Shipping—A Literature Review. Appl. Sci. 2021, 11, 4553. [Google Scholar] [CrossRef]
- Veitch, E.; Alsos, O.A. A Systematic Review of Human-AI Interaction in Autonomous Ship Systems. Saf. Sci. 2022, 152, 105778. [Google Scholar] [CrossRef]
- Grootendorst, M. BERTopic: Neural Topic Modeling with a Class-Based TF-IDF Procedure 2022. arXiv 2022, arXiv:2203.05794. [Google Scholar]
- Ierardi, C.; Orihuela, L.; Jurado, I. Distributed Estimation Techniques for Cyber-Physical Systems: A Systematic Review. Sensors 2019, 19, 4720. [Google Scholar] [CrossRef] [PubMed]
- Khan, N.; Solvang, W.D.; Yu, H. Industrial Internet of Things (IIoT) and Other Industry 4.0 Technologies in Spare Parts Warehousing in the Oil and Gas Industry: A Systematic Literature Review. Logistics 2024, 8, 16. [Google Scholar] [CrossRef]
- Xiao, Y.; Watson, M. Guidance on Conducting a Systematic Literature Review. J. Plan. Educ. Res. 2019, 39, 93–112. [Google Scholar] [CrossRef]
- IMO. IMO Takes First Steps to Address Autonomous Ships. Available online: https://www.imo.org/en/MediaCentre/PressBriefings/Pages/08-MSC-99-MASS-scoping.aspx (accessed on 11 January 2024).
- Li, S.; Xu, Z.; Liu, J.; Hu, X. Towards the Testing and Validation of Autonomous Ships: Design of a Variable Stability Ship Control System. J. Mar. Sci. Eng. 2023, 11, 1274. [Google Scholar] [CrossRef]
- Tsimplis, M. Designing Norms for Autonomous Ships: The Obligation to Call for Help and the Duty to Save Life in Danger at Sea. In Autonomous Vessels in Maritime Affairs; Johansson, T.M., Fernández, J.E., Dalaklis, D., Pastra, A., Skinner, J.A., Eds.; Studies in National Governance and Emerging Technologies; Springer International Publishing: Cham, Switzerland, 2023; pp. 99–118. ISBN 978-3-031-24739-2. [Google Scholar]
- Chaal, M.; Banda, O.A.V.; Glomsrud, J.A.; Basnet, S.; Hirdaris, S.; Kujala, P. A Framework to Model the STPA Hierarchical Control Structure of an Autonomous Ship. Saf. Sci. 2020, 132, 104939. [Google Scholar] [CrossRef]
- Fan, C.; Wróbel, K.; Montewka, J.; Gil, M.; Wan, C.; Zhang, D. A Framework to Identify Factors Influencing Navigational Risk for Maritime Autonomous Surface Ships. Ocean Eng. 2020, 202, 107188. [Google Scholar] [CrossRef]
- Utne, I.B.; Rokseth, B.; Sørensen, A.J.; Vinnem, J.E. Towards Supervisory Risk Control of Autonomous Ships. Reliab. Eng. Syst. Saf. 2020, 196, 106757. [Google Scholar] [CrossRef]
- Shaobo, W.; Yingjun, Z.; Lianbo, L. A Collision Avoidance Decision-Making System for Autonomous Ship Based on Modified Velocity Obstacle Method. Ocean Eng. 2020, 215, 107910. [Google Scholar] [CrossRef]
- Chun, D.-H.; Roh, M.-I.; Lee, H.-W.; Ha, J.; Yu, D. Deep Reinforcement Learning-Based Collision Avoidance for an Autonomous Ship. Ocean Eng. 2021, 234, 109216. [Google Scholar] [CrossRef]
- Li, X.; Oh, P.; Zhou, Y.; Yuen, K.F. Operational Risk Identification of Maritime Surface Autonomous Ship: A Network Analysis Approach. Transp. Policy 2023, 130, 1–14. [Google Scholar] [CrossRef]
- Felski, A.; Zwolak, K. The Ocean-Going Autonomous Ship—Challenges and Threats. J. Mar. Sci. Eng. 2020, 8, 41. [Google Scholar] [CrossRef]
- de Vos, J.; Hekkenberg, R.G.; Valdez Banda, O.A. The Impact of Autonomous Ships on Safety at Sea—A Statistical Analysis. Reliab. Eng. Syst. Saf. 2021, 210, 107558. [Google Scholar] [CrossRef]
- Chaal, M.; Ren, X.; BahooToroody, A.; Basnet, S.; Bolbot, V.; Banda, O.A.V.; Van Gelder, P. Research on Risk, Safety, and Reliability of Autonomous Ships: A Bibliometric Review. Saf. Sci. 2023, 167, 106256. [Google Scholar] [CrossRef]
- Deling, W.; Dongkui, W.; Changhai, H.; Changyue, W. Marine Autonomous Surface Ship—A Great Challenge to Maritime Education and Training. Am. J. Water Sci. Eng. 2020, 6, 10–16. [Google Scholar] [CrossRef]
- Kooij, C.; Hekkenberg, R. Identification of a Task-Based Implementation Path for Unmanned Autonomous Ships. Marit. Policy Manag. 2022, 49, 954–970. [Google Scholar] [CrossRef]
- Munim, Z.H.; Haralambides, H. Advances in Maritime Autonomous Surface Ships (MASS) in Merchant Shipping. Marit. Econ. Logist. 2022, 24, 181–188. [Google Scholar] [CrossRef]
- Akbar, A.; Aasen, A.K.A.; Msakni, M.K.; Fagerholt, K.; Lindstad, E.; Meisel, F. An Economic Analysis of Introducing Autonomous Ships in a Short-Sea Liner Shipping Network. Int. Trans. Oper. Res. 2021, 28, 1740–1764. [Google Scholar] [CrossRef]
- Kurt, I.; Aymelek, M. Operational and Economic Advantages of Autonomous Ships and Their Perceived Impacts on Port Operations. Marit. Econ. Logist. 2022, 24, 302–326. [Google Scholar] [CrossRef]
- Karlis, T. Maritime Law Issues Related to the Operation of Unmanned Autonomous Cargo Ships. WMU J. Marit. Aff. 2018, 17, 119–128. [Google Scholar] [CrossRef]
- Kim, M.; Joung, T.-H.; Jeong, B.; Park, H.-S. Autonomous Shipping and Its Impact on Regulations, Technologies, and Industries. J. Int. Marit. Saf. Environ. Aff. Shipp. 2020, 4, 17–25. [Google Scholar] [CrossRef]
- Vojković, G.; Milenković, M. Autonomous Ships and Legal Authorities of the Ship Master. Case Stud. Transp. Policy 2020, 8, 333–340. [Google Scholar] [CrossRef]
- Deerwester, S.; Dumais, S.T.; Furnas, G.W.; Landauer, T.K.; Harshman, R. Indexing by Latent Semantic Analysis. J. Am. Soc. Inf. Sci. 1990, 41, 391–407. [Google Scholar] [CrossRef]
- Hofmann, T. Probabilistic Latent Semantic Analysis 2013. arXiv 2013, arXiv:1301.6705. [Google Scholar]
- Blei, D.M.; Ng, A.Y.; Jordan, M.I. Latent Dirichlet Allocation. J. Mach. Learn. Res. 2003, 3, 993–1022. [Google Scholar]
- Lee, D.D.; Seung, H.S. Learning the Parts of Objects by Non-Negative Matrix Factorization. Nature 1999, 401, 788–791. [Google Scholar] [CrossRef] [PubMed]
- Angelov, D. Top2Vec: Distributed Representations of Topics 2020. arXiv 2020, arXiv:2008.09470. [Google Scholar]
- Egger, R.; Yu, J. A Topic Modeling Comparison between LDA, NMF, Top2Vec, and BERTopic to Demystify Twitter Posts. Front. Sociol. 2022, 7, 886498. [Google Scholar] [CrossRef]
- Devlin, J.; Chang, M.-W.; Lee, K.; Toutanova, K. BERT: Pre-Training of Deep Bidirectional Transformers for Language Understanding 2019. arXiv 2019, arXiv:1810.04805. [Google Scholar]
- Hosseini, S.; Varzaneh, Z.A. Deep Text Clustering Using Stacked AutoEncoder. Multimed. Tools Appl. 2022, 81, 10861–10881. [Google Scholar] [CrossRef]
- Grootendorst, M.J. BERTopic. Available online: https://maartengr.github.io/BERTopic/index.html (accessed on 23 January 2024).
- McInnes, L.; Healy, J.; Melville, J. UMAP: Uniform Manifold Approximation and Projection for Dimension Reduction 2020. arXiv 2020, arXiv:1802.03426. [Google Scholar]
- Campello, R.J.G.B.; Moulavi, D.; Sander, J. Density-Based Clustering Based on Hierarchical Density Estimates. In Advances in Knowledge Discovery and Data Mining; Pei, J., Tseng, V.S., Cao, L., Motoda, H., Xu, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 160–172. [Google Scholar]
- Carbonell, J.; Goldstein, J. The Use of MMR, Diversity-Based Reranking for Reordering Documents and Producing Summaries. In Proceedings of the 21st Annual International ACM SIGIR Conference on Research and Development in Information Retrieval, Melbourne, Australia, 24–28 August 1998; ACM: Melbourne, Australia, 1998; pp. 335–336. [Google Scholar]
- Mifrah, S.; Benlahmar, E.H. Topic Modeling Coherence: A Comparative Study between Lda and Nmf Models Using COVID’19 Corpus. Int. J. Adv. Trends Comput. Sci. Eng. 2020, 9, 5756–5761. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DoA | Description |
|---|---|
| DoA 1 | Ship with automated processes and decision support, where the seafarers are on board for the operation and control of shipboard systems and functions. |
| DoA 2 | Remotely controlled ship with seafarers on board. The ship is controlled and operated from another location, but seafarers are on board. |
| DoA 3 | Remotely controlled ship without seafarers on board. The ship is controlled and operated from another location. There are no seafarers on board. |
| DoA 4 | Fully autonomous ship, where the operating system of the ship is able to make decisions and determine actions by itself. |
| Design | Navigation | Safety | Implementation | Impact | Legal |
|---|---|---|---|---|---|
| General design Sub-systems | Trajectory planning Maneuvering Risk control | Cybersecurity Collision avoidance | Implementation path Adoption Training | Cost–benefit analysis Environmental | Law Regulation |
| Category | Year | Author(s) | Insights |
|---|---|---|---|
| Design | 2023 | Li et al. [9] | This paper performs simulations and proposes the novel concept of a variable stability ship and the design of its control system, which can be used to test the performance of different control strategies on different types of ships, thus reducing the R&D costs of physical-model-based testing and the time spent on developing physical ship models. |
| 2023 | Tsimplis [10] | This study proposes two legal norms that new autonomous ships should comply with for safety at sea. The first concerns the arguable obligation of a carrier to call for salvage assistance when the ship is in distress. The second legal norm concerns the contribution of merchant ships to search and rescue operations and the safety of life at sea. | |
| Navigation | 2020 | Chaal et al. [11] | This study presents a framework for modeling a hierarchical control structure for systems theoretical process analysis of an autonomous ship. |
| 2020 | Fan et al. [12] | This study investigates the risk influencing factors for an autonomous surface vessel operating at DoA 3. As a result, 23 human-related factors, 12 ship-related factors, 8 environmental-related factors, and 12 technology-related factors were defined. | |
| 2020 | Utne et al. [13] | This study proposes a new framework for online risk modeling for autonomous ships. The proposed framework has general relevance for systems other than autonomous ships, both manned and unmanned, and with different levels of autonomy. | |
| 2020 | Wang et al. [14] | This study proposes a novel collision avoidance decision system for autonomous ships. | |
| 2021 | Chun et al. [15] | This study deals with a ship collision avoidance method considering COLREGs. The proposed deep reinforcement learning method shows good performance for various validation situations. | |
| 2023 | Li et al. [16] | This study suggests that design faults, cyber-attacks, inapplicable regulations, propulsion and steering system malfunction, shore control center poor performance, and autonomous navigation controller malfunction are influential both from the perspective of local connectivity and the whole network. | |
| Safety | 2020 | Felski and Zwolak [17] | This study describes the dangers arising from the specificity of systems that can be used to solve navigational problems, pointing out the importance of testing under real traffic conditions; improvements in the transmission of radar data from vessels to shore; self-diagnosis systems, including positioning devices, communication, and power supply, play a crucial role; lack of regulations on the qualification of operators of unmanned vessels. |
| 2021 | de Vos et al. [18] | This study suggests that crew removal has a much greater impact on safety than autonomous navigation. It is concluded that the implementation of autonomy on small cargo vessels under 120 m in length will have the greatest safety benefit, as these vessels account for the majority of recorded ship and life losses. | |
| 2023 | Chaal et al. [19] | This study conducts a bibliometric analysis of 417 publications on the safety of autonomous ships and suggests three main themes in this research domain: “safety engineering and risk assessment for decision making”, “navigation safety and collision avoidance”, and “cybersecurity risk analysis”. | |
| Implementation | 2020 | Deling et al. [20] | This study analyzes seafarers’ competency requirements for MASSs at different levels of development, predicts the impact of MASSs on MET, and proposes the direction of seafarers’ MET in the future. |
| 2021 | Kooij and Hekkenberg [21] | This study proposes a logical path to unmanned autonomous vessels, concluding that near-shore navigation, engine room maintenance, responsibility, and life support can be replaced. The most difficult cluster to replace is engine room maintenance. | |
| 2022 | Munim and Haralambides [22] | This study reviews 152 studies related to autonomous ships and suggests ongoing issues related to MASS adoption, including the classification of levels of automation (LOA), the status quo of maritime education and training (MET), social impacts and prospects for maritime employment, intelligent ship–port interfaces, cyber threats, and finally, value creation for all maritime stakeholders. | |
| Impact | 2021 | Akbar et al. [23] | This study presents a path–flow-based model formulation and a heuristic route generation method to optimize the network, providing evidence that autonomous ships could contribute to significant cost savings. |
| 2021 | Poznańska and Montewka [2] | This study presents the state-of-the-art system of costs and benefits of operation of future autonomous merchant vessels with respect to estimation of operating, voyage, and capital costs in future autonomous shipping and vessel platooning. | |
| 2022 | Kurt and Aymelek [24] | This study evaluates the processes for realizing autonomous ship–port interoperability, highlights the navigational issues facing port areas, and the challenges of MASS–port interactions during cargo operations. | |
| Legal | 2018 | Karlis [25] | The international regulatory framework is based on manned ships. Significant changes or a completely new convention will be required to allow unmanned vessels to enter the trade. Until the necessary changes are made and the operational status of unmanned vessels is clarified, the risk of investing in the new concept is significantly higher than investing in a manned vessel. |
| 2019 | Kim et al. [26] | This study suggests that key issues such as safety, security, jobs and training, and legal and ethical issues need to be addressed to find a solution. Holistic approaches to the development of technology and regulatory frameworks need to be implemented, and communication and cooperation among multiple stakeholders based on mutual understanding are essential for the successful arrival of MASS in the maritime industry. | |
| 2020 | Vojković and Milenković [27] | This study suggests that the main challenge is for engineers to combine technologies to avoid risks and collisions, to navigate to the destination and to perform complex maneuvers. It is necessary to create teams at the level of companies and universities, scientists, and lawyers who will work on the development of new legal rules of navigation. |
| Name | Description | Value |
|---|---|---|
| embedding model | The initial BERTopic model applied for fine-tuning. | all-MiniLM-L6-v2 |
| HDBSCAN | Density-based clustering algorithm. The eom (excess of mass) method is adopted to determine cluster selection. | min_cluster_size = 10, metric = ‘Euclidean’, cluster_selection_method = ‘eom’, prediction_data = True |
| umap | Model for dimensionality reduction. The parameter ‘n_neighbors’ influences UMAP’s trade-off between local and global structural preservation, while ‘n_components’ enables the user to specify the desired dimensionality of the reduced data embedding space. ‘min_dist’ regulates the extent to which UMAP can cluster data points closely together. Cosine distance is employed for similarity calculations. | n_neighbors = 15, n_components = 5, min_dist = 0.1, metric = ‘cosine’ |
| diversity | Assessing the diversity of the chosen keywords and key phrases. The diversity score falls between 0 and 1, where 0 indicates minimal diversity, and 1 represents maximum diversity. | 0.2 |
| top_n_words | This parameter defines how many keywords or key phrases should be returned. | 10 |
| Topic | Count | Name | Topic Label |
|---|---|---|---|
| −1 | 365 | −1_ship_control_fig_model | −1_ship_control_fig |
| 0 | 786 | 0_port_systems_control_time | 0_port_systems_control |
| 1 | 327 | 1_sea_water_marine_data | 1_sea_water_marine |
| 2 | 271 | 2_ship_collision_risk_ships | 2_ship_collision_risk |
| 3 | 179 | 3_control_underwater_vehicle_fig | 3_control_underwater_vehicle |
| 4 | 34 | 4_wave_waves_model_sea | 4_wave_waves_model |
| 5 | 20 | 5_detection_image_learning_images | 5_detection_image_learning |
| 6 | 16 | 6_uav_uavs_flight_detection | 6_uav_uavs_flight |
| 7 | 15 | 7_oil_spill_spills_pollution | 7_oil_spill_spills |
| 8 | 10 | 8_gps_gnss_navigation_position | 8_gps_gnss_navigation |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hirata, E.; Hansen, A.S. Identifying Key Issues in Integration of Autonomous Ships in Container Ports: A Machine-Learning-Based Systematic Literature Review. Logistics 2024, 8, 23. https://doi.org/10.3390/logistics8010023
Hirata E, Hansen AS. Identifying Key Issues in Integration of Autonomous Ships in Container Ports: A Machine-Learning-Based Systematic Literature Review. Logistics. 2024; 8(1):23. https://doi.org/10.3390/logistics8010023
Chicago/Turabian StyleHirata, Enna, and Annette Skovsted Hansen. 2024. "Identifying Key Issues in Integration of Autonomous Ships in Container Ports: A Machine-Learning-Based Systematic Literature Review" Logistics 8, no. 1: 23. https://doi.org/10.3390/logistics8010023
APA StyleHirata, E., & Hansen, A. S. (2024). Identifying Key Issues in Integration of Autonomous Ships in Container Ports: A Machine-Learning-Based Systematic Literature Review. Logistics, 8(1), 23. https://doi.org/10.3390/logistics8010023