
Numerical and Theoretical Stability Study of a Viscoelastic Plate Equation with Nonlinear Frictional Damping Term and a Logarithmic Source Term


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
Preliminaries
- is a non-increasing function satisfyingand there exists a function that is linear or is strictly convex and strictly increasing function on , , with , such thatwhere is a positive non-increasing differentiable function.
- is a nondecreasing function and there exists a strictly increasing function , with , and such thatWe also assume that H, defined by , is a strictly convex function on , for some , when is nonlinear.
- The constant k in (1) satisfies , where is the positive real number satisfying:and is the smallest positive number satisfyingwhere .
2. Local and Global Existence
3. Technical Lemmas
4. Stability
- 1.
- Firstly, consider the case when and are both linear.Take where and . Then where and For the frictional nonlinearity, assume that . So, . Hence, it follows from (52) that
- 2.
- Secondly, we consider the case when is linear and is non-linear.
- 3.
- Thirdly, when is non-linear and is linear.We take where and is small enough so that (9) is satisfied. Then where and Also, assume that where . Then, after taking , we haveandTherefore, applying (72), we obtain
- 4.
- Lastly, we consider the case when and are non-linear.Let , where a is chosen so that hypothesis (9) remains true. Thenwhere b is a fixed constant. In this case, we let and Hence with we obtainandTherefore, applying (73), we obtain,
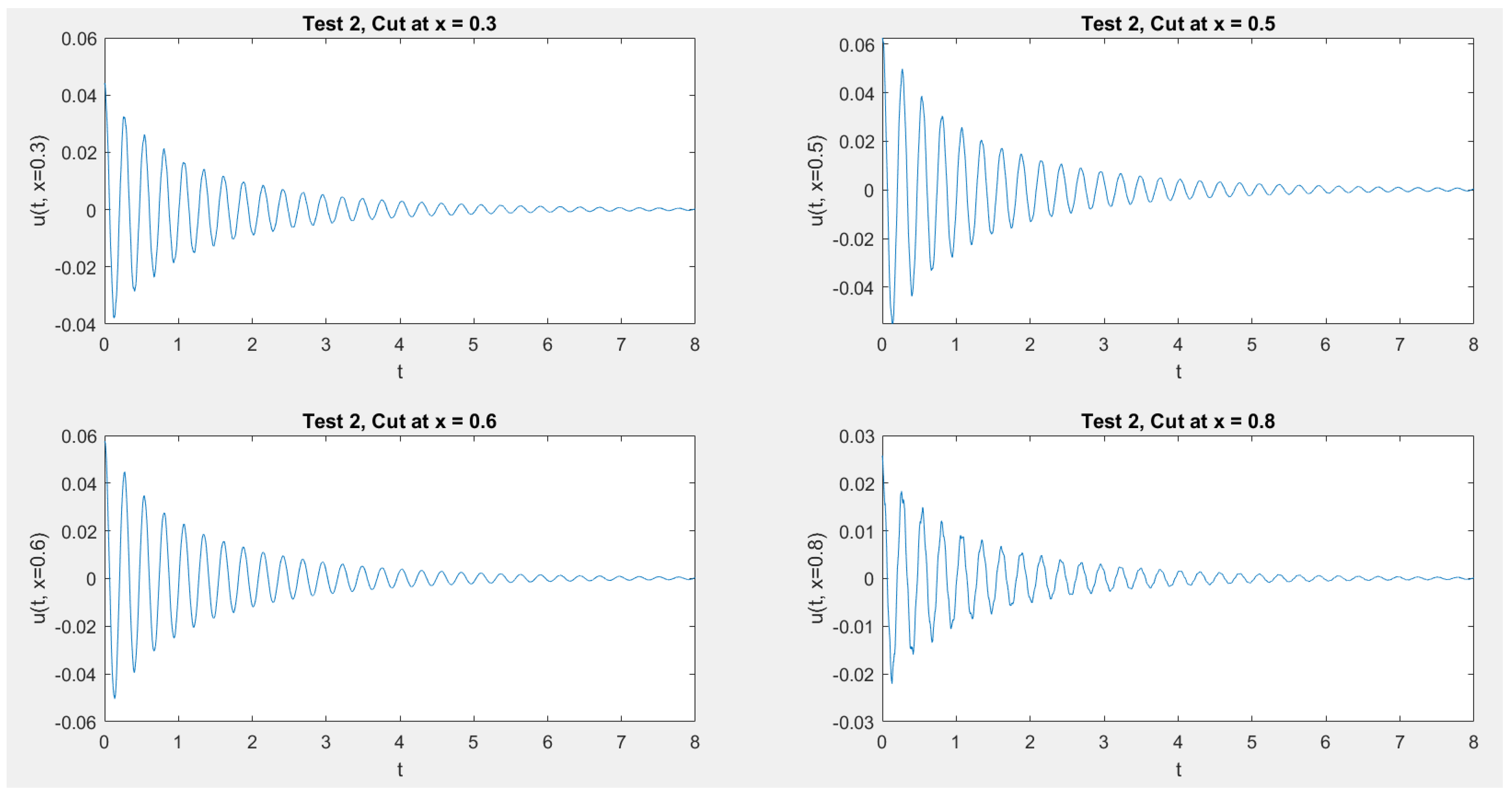
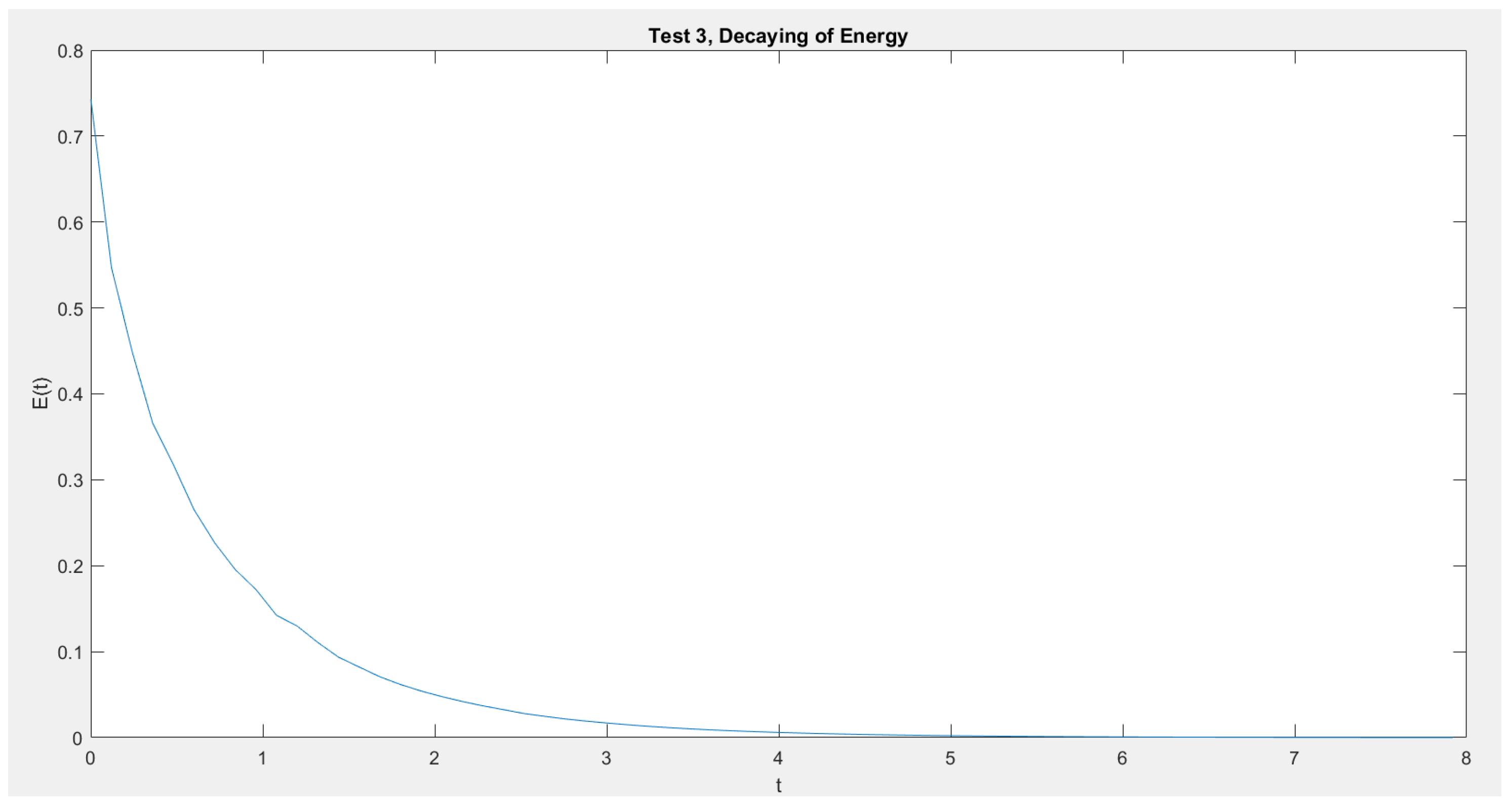
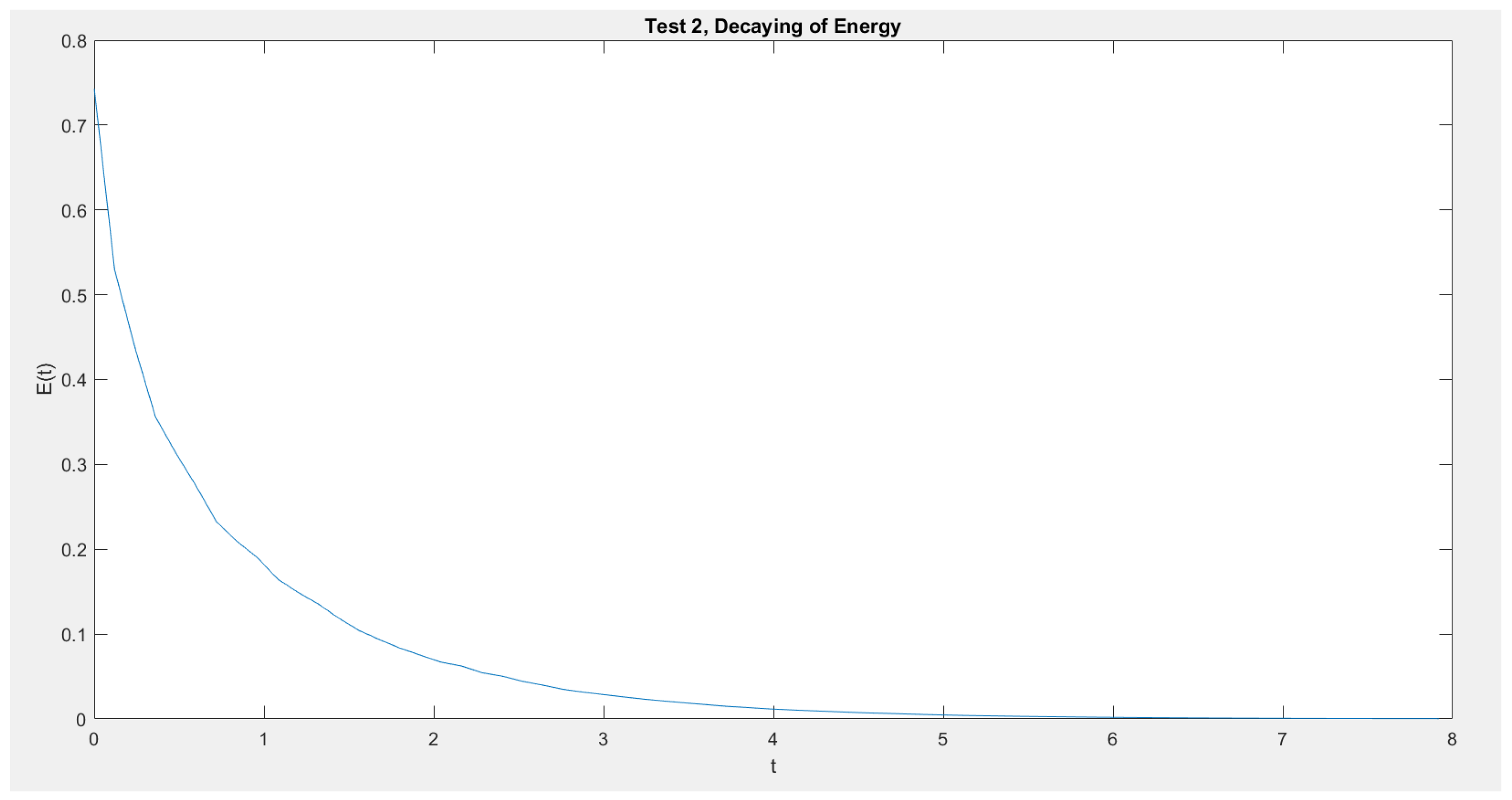
5. Numerical Results
- Test 1: We consider and .
- Test 2: We consider and .
- Test 3: We consider and
- Test 4: We consider and .
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dafermos, C.M. An abstract Volterra equation with applications to linear viscoelasticity. J. Differ. Equ. 1970, 7, 554–569. [Google Scholar] [CrossRef] [Green Version]
- Lagnese, J.E. Asymptotic energy estimates for Kirchhoff plates subject to weak viscoelastic damping. Int. Ser. Numer. Math. 1989, 91, 211–236. [Google Scholar]
- Rivera, J.M.; Lapa, E.C.; Barreto, R. Decay rates for viscoelastic plates with memory. J. Elast. 1996, 44, 61–87. [Google Scholar] [CrossRef]
- Komornik, V. On the nonlinear boundary stabilization of Kirchhoff plates. Nonlinear Differ. Equ. Appl. NoDEA 1994, 1, 323–337. [Google Scholar] [CrossRef]
- Messaoudi, S.A. Global existence and nonexistence in a system of Petrovsky. J. Math. Anal. Appl. 2002, 265, 296–308. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Zhou, Y. Global nonexistence for a semilinear Petrovsky equation. Nonlinear Anal. Theory Methods Appl. 2009, 70, 3203–3208. [Google Scholar] [CrossRef]
- Barrow, J.D.; Parsons, P. Inflationary models with logarithmic potentials. Phys. Rev. D 1995, 52, 5576. [Google Scholar] [CrossRef] [Green Version]
- Enqvist, K.; McDonald, J. Q-balls and baryogenesis in the MSSM. Phys. Lett. B 1998, 425, 309–321. [Google Scholar] [CrossRef] [Green Version]
- Bialynicki-Birula, I.; Mycielski, J. Nonlinear wave mechanics. Ann. Phys. 1976, 100, 62–93. [Google Scholar] [CrossRef]
- Cazenave, T.; Haraux, A. Équations d’évolution avec non linéarité logarithmique. Ann. Fac. Sci. Toulouse Mathématiques 1980, 2, 21–51. [Google Scholar]
- Gorka, P. Logarithmic Klein-Gordon equation. Acta Phys. Polon. 2009, 40, 59–66. [Google Scholar]
- Al-Gharabli, M.M.; Messaoudi, S.A. Existence and a general decay result for a plate equation with nonlinear damping and a logarithmic source term. J. Evol. Equ. 2018, 18, 105–125. [Google Scholar] [CrossRef]
- Bartkowski, K.; Górka, P. One-dimensional Klein–Gordon equation with logarithmic nonlinearities. J. Phys. A Math. Theor. 2008, 41, 355201. [Google Scholar] [CrossRef]
- Hiramatsu, T.; Kawasaki, M.; Takahashi, F. Numerical study of Q-ball formation in gravity mediation. J. Cosmol. Astropart. Phys. 2010, 2010, 008. [Google Scholar] [CrossRef] [Green Version]
- Han, X. Global existence of weak solutions for a logarithmic wave equation arising from Q-ball dynamics. Bull. Korean Math. Soc. 2013, 50, 275–283. [Google Scholar] [CrossRef] [Green Version]
- Kafini, M.; Messaoudi, S. Local existence and blow up of solutions to a logarithmic nonlinear wave equation with delay. Appl. Anal. 2020, 99, 530–547. [Google Scholar] [CrossRef]
- Peyravi, A. General stability and exponential growth for a class of semi-linear wave equations with logarithmic source and memory terms. Appl. Math. Optim. 2020, 81, 545–561. [Google Scholar] [CrossRef]
- Xu, R.; Lian, W.; Kong, X.; Yang, Y. Fourth order wave equation with nonlinear strain and logarithmic nonlinearity. Appl. Numer. Math. 2019, 141, 185–205. [Google Scholar] [CrossRef]
- Lian, W.; Xu, R. Global well-posedness of nonlinear wave equation with weak and strong damping terms and logarithmic source term. Adv. Nonlinear Anal. 2019, 9, 613–632. [Google Scholar] [CrossRef]
- Wang, X.; Chen, Y.; Yang, Y.; Li, J.; Xu, R. Kirchhoff-type system with linear weak damping and logarithmic nonlinearities. Nonlinear Anal. 2019, 188, 475–499. [Google Scholar] [CrossRef]
- Al-Mahdi, A.M. Optimal decay result for Kirchhoff plate equations with nonlinear damping and very general type of relaxation functions. Bound. Value Probl. 2019, 2019, 82. [Google Scholar] [CrossRef]
- Al-Gharabli, M.M.; Al-Mahdi, A.M.; Messaoudi, S.A. Decay Results for a Viscoelastic Problem with Nonlinear Boundary Feedback and Logarithmic Source Term. J. Dyn. Control. Syst. 2020, 28, 71–89. [Google Scholar] [CrossRef]
- Al-Gharabli, M.M.; Al-Mahdi, A.M.; Kafini, M. Global existence and new decay results of a viscoelastic wave equation with variable exponent and logarithmic nonlinearities. AIMS Math. 2021, 6, 10105–10129. [Google Scholar] [CrossRef]
- Cavalcanti, M.M.; Domingos Cavalcanti, V.N.; Soriano, J.A. Exponential decay for the solution of semilinear viscoelastic wave equations with localized damping. Electron. J. Differ. Equ. (EJDE) 2002, 2002, 1–14. [Google Scholar]
- Messaoudi, S.A. General decay of the solution energy in a viscoelastic equation with a nonlinear source. Nonlinear Anal. Theory Methods Appl. 2008, 69, 2589–2598. [Google Scholar] [CrossRef]
- Messaoudi, S.A. General decay of solutions of a viscoelastic equation. J. Math. Anal. Appl. 2008, 341, 1457–1467. [Google Scholar] [CrossRef] [Green Version]
- Alabau-Boussouira, F.; Cannarsa, P. A general method for proving sharp energy decay rates for memory-dissipative evolution equations. Comptes Rendus Math. 2009, 347, 867–872. [Google Scholar] [CrossRef] [Green Version]
- Lasiecka, I.; Messaoudi, S.A.; Mustafa, M.I. Note on intrinsic decay rates for abstract wave equations with memory. J. Math. Phys. 2013, 54, 031504. [Google Scholar] [CrossRef]
- Messaoudi, S.A.; Al-Khulaifi, W. General and optimal decay for a quasilinear viscoelastic equation. Appl. Math. Lett. 2017, 66, 16–22. [Google Scholar] [CrossRef]
- Al-Gharabli, M.M.; Guesmia, A.; Messaoudi, S.A. Existence and a general decay results for a viscoelastic plate equation with a logarithmic nonlinearity. Commun. Pure Appl. Anal. 2019, 18, 159–180. [Google Scholar] [CrossRef] [Green Version]
- Mustafa, M.I. Optimal decay rates for the viscoelastic wave equation. Math. Methods Appl. Sci. 2018, 41, 192–204. [Google Scholar] [CrossRef]
- Gross, L. Logarithmic sobolev inequalities. Am. J. Math. 1975, 97, 1061–1083. [Google Scholar] [CrossRef]
- Chen, H.; Luo, P.; Liu, G. Global solution and blow-up of a semilinear heat equation with logarithmic nonlinearity. J. Math. Anal. Appl. 2015, 422, 84–98. [Google Scholar] [CrossRef]
- Al-Gharabli, M.M.; Al-Mahdi, A.M.; Messaoudi, S.A. General and optimal decay result for a viscoelastic problem with nonlinear boundary feedback. J. Dyn. Control Syst. 2019, 25, 551–572. [Google Scholar] [CrossRef]
- Arnol’d, V.I. Mathematical Methods of Classical Mechanics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 60. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Gharabli, M.M.; Almahdi, A.M.; Noor, M.; Audu, J.D. Numerical and Theoretical Stability Study of a Viscoelastic Plate Equation with Nonlinear Frictional Damping Term and a Logarithmic Source Term. Math. Comput. Appl. 2022, 27, 10. https://doi.org/10.3390/mca27010010
Al-Gharabli MM, Almahdi AM, Noor M, Audu JD. Numerical and Theoretical Stability Study of a Viscoelastic Plate Equation with Nonlinear Frictional Damping Term and a Logarithmic Source Term. Mathematical and Computational Applications. 2022; 27(1):10. https://doi.org/10.3390/mca27010010
Chicago/Turabian StyleAl-Gharabli, Mohammad M., Adel M. Almahdi, Maher Noor, and Johnson D. Audu. 2022. "Numerical and Theoretical Stability Study of a Viscoelastic Plate Equation with Nonlinear Frictional Damping Term and a Logarithmic Source Term" Mathematical and Computational Applications 27, no. 1: 10. https://doi.org/10.3390/mca27010010
APA StyleAl-Gharabli, M. M., Almahdi, A. M., Noor, M., & Audu, J. D. (2022). Numerical and Theoretical Stability Study of a Viscoelastic Plate Equation with Nonlinear Frictional Damping Term and a Logarithmic Source Term. Mathematical and Computational Applications, 27(1), 10. https://doi.org/10.3390/mca27010010