1. Introduction
We consider the numerical solution of the boundary value problems (BVPs) defined on semi-infinite intervals belonging to the class of problems
where
satisfies appropriate smoothness conditions,
,
and
are given constants. BVPs belonging to (
1) arise mainly in boundary layer theory, see Schlichting and Gersten [
1], but also in fields of current interest such as biology, chemistry, engineering, mechanics or physics. For instance, an interesting mathematical model for the deflection of a semi-infinite pile embedded in soft soil at a distance
x below the surface of the soil can be found in Lentini and Keller [
2] or Fazio [
3]. This model is a fourth-order ordinary differential equation with two boundary conditions at the origin and two at infinity.
Before considering the application of any numerical method, a question naturally arises: Is the BVP (
1) well-posed? Indeed, few results are known about the existence and uniqueness question. On this subject, we can quote a paper by Weyl [
4] about the celebrated Blasius problem [
5] and several papers concerning the more general Falkner–Skan model [
6]. Hence, any new idea for investigating that question is worth considering.
In this paper, we prove a theorem relating the existence and uniqueness question to the number of real zeros of a “transformation function” defined within the formulation of the iterative transformation method (ITM). Then, as a numerical test for the existence and uniqueness of solutions of (
1) we propose the application of the ITM to look for the number of real zeros of that function. In this context, the first application of that test was considered in [
7].
The ITM discussed herein allows us to numerically integrate the class of BVPs (
1). The method in point allows us to transform a BVP to a sequence of initial value problems. Such a transformation also has theoretical interest because it may represent an intermediate step to prove existence and uniqueness theorems (see [
8] (pp. 7–13)).
A first application of the ITM to a simple problem describing a biological model was given, on an intuitive basis, in [
9]. Moreover, other applications arose in connection with the shock front propagation in rate-type materials [
10], the classical Stefan’s problem [
11], and the spreading of a viscous fluid under the influence of gravity [
11]. A recent review concerning the applications of the ITM can be found, by the interested reader, in Fazio [
12].
It was proved in [
13] that the ITM is an extension of the non-ITM proposed in [
9]. However, the applicability of non-ITMs is based on the invariance properties of the governing differential equation and of the given boundary conditions. As a consequence, non-ITMs are considered as
ad hoc methods (see [
14,
15,
16,
17]). For the interested reader, a recent review reporting on the applications of the non-ITM can be found in Fazio [
18].
To the best of our knowledge, the ITM is the first transformation method applicable to a general class of problems.
The remainder of the paper is organized as follows. In
Section 6, we define the ITM. In
Section 3, we provide a simple constructive proof of the main result that relates the existence and uniqueness of solutions of BVPs defined on infinite intervals to the number of real zeros of the transformation function. There, we point out how the present approach reduces the question of existence and uniqueness to find the number of real zeros of the transformation function. A similar theorem has been proved by this author for a class of free BVPs governed by second-order differential equations, see [
19]. Some guidelines on the definition of the transformation function and a discussion on its sensitivity analysis are developed in
Section 4. In
Section 5, we apply the iterative method to two BVPs describing, respectively, the Sakiadis problem and the Falkner–Skan model. Our main concern is to verify numerically whether the considered problem has a unique solution. In this context, the test indicates the existence and uniqueness of the solution for the first model and nonuniqueness for the second one. The last section is devoted to the final remarks and conclusions. On the basis of the theorem proved in
Section 3, the proposed numerical test represents a possible way to investigate the existence and uniqueness of solution of BVPs. Further evidence for this conclusion is given by the numerical experiments proposed in
Section 5, as well as by the study reported in [
7].
In the following sections, we apply the ITM to the Sakiadis problem [
20,
21]
Moreover, we apply our ITM to the Falkner–Skan equation with relevant boundary conditions
where
f and
are appropriate similarity variables and
is a parameter. This set is called the Falkner–Skan model, after the names of two English mathematicians who first studied it [
6]. Let us notice that for
, the BVP (
3) reduces to the celebrated Blasius problem [
5]. As pointed out by Na [
16] (pp. 146–147), if
, the BVP (
3) cannot be solved by a non-ITM. Indeed, the governing differential equation in (
3) is not invariant with respect to any scaling group of point transformations.
The existence and uniqueness question for the problem (
3) is a complex matter. Assuming that
and under the restriction
, known as normal flow condition, Hartree [
22] and Stewartson [
23] proved that the problem (
3) has a unique solution, whose first derivative tends to one exponentially. Coppel [
24] and Craven and Peletier [
25] pointed out that the above restriction on the first derivative can be omitted when
. For each value of the parameter
, there exists a physical solution with a positive monotone decreasing second derivative, in the domain
, that approaches zero as the independent variables goes to infinity, as proved by Weyl [
4]. In the case
, the Falkner–Skan model loses the uniqueness and a hierarchy of solutions with reverse flow exists. In fact, for
, Craven and Peletier [
26] computed solutions for which
for some value of
. In each of these solutions, the velocity approaches its limit exponentially in
. Here and in the following, the term normal flow indicates that the flow velocity has a unique direction, and instead, reverse flow means that the velocity is both positive and negative in the integration interval.
The considered problem also has multiple solutions for
, as reported by Veldman and van de Vooren [
27], with the minimum value of
given by
In this range there exist two physical solutions, one for normal flow and one for reverse flow. For
, only one solution exists. Finally, for
, the problem has no solution at all. Our interest here is to apply the ITM to the range of
where multiple solutions are admitted, in particular, we would like to numerically compute the famous solutions of Stewartson [
23,
28]. As we shall see in the following sections, the obtained results are in very good agreement with those available in the literature.
Hartree [
22] was the first to numerically solve the Falkner–Skan model. Then, Cebeci and Keller [
29] applied shooting and parallel shooting methods requiring asymptotic boundary conditions to be imposed at a changing unknown boundary in the computation process. As a result, they reported convergence difficulties, which can be avoided by moving towards more complex methods. Moreover, to guarantee reasonable accuracy, they were forced to use a
small enough step-size and extensive computations for the solution of the IVPs. Na [
16] (pp. 280–286) described the application of invariant imbedding to the Falkner–Skan model. For this problem, a modified shooting method [
30] and finite-difference methods [
31,
32] were presented by Asaithambi. Sher and Yakhot [
33] defined a new approach to solve this problem by shooting from infinity, using some simple analysis of the asymptotic behaviour of the solution at infinity. Kuo [
34] used a differential transformation method, to compute a series solution of the Falkner–Skan equation. Asaithambi [
35] proposed a faster shooting method by using a recursive evaluation of Taylor coefficients. Zhang and Chen [
36] investigated a modification of the shooting method, where the computation of the Jacobian matrix was obtained by solving two IVPs. A Galerkin–Laguerre spectral method was defined and applied to the Falkner–Skan model by Auteri and Quartapelle [
37].
2. The Iterative Transformation Method
By requiring the invariance of (
1) with respect to a given transformation group, we characterize a subclass of problems. As a consequence, non-ITMs are applicable only to special classes of problems. To overcome this drawback, we let the function
in (
1) also depend on a numerical parameter
h and we use
h also to modify the initial conditions to obtain invariant initial conditions, and in this way, we introduce the problem
This allows us to consider the extended stretching group
where
and
are constants that are different from zero and
is the exponential of the group parameter, and therefore, it is not zero. Our intention is to require the invariance of the governing differential equation in (
5) with respect to (
6). To this end, we have to require that the following relation
holds true. We impose (
7) in order to recover (
1) from (
5) as
. Therefore, (
1) can be embedded in the BVP
Of course, a given problem belonging to (
1) can always be embedded into (
8) for every value of
and
different from zero. The requested invariance means that (
6) transforms a problem of form (
8) to a problem of the same form but with different values of
h and
if
.
From a numerical viewpoint, we have to consider the initial value problem (IVP) in the starred variables defined by
where
and
have to be considered as fixed values. If for every value of
, the problem (
9) is well posed, then
is uniquely defined. Consequently, the application of invariance considerations allows us to obtain, if
,
If
, then we can use
h to get a non-invariant boundary condition at infinity. In fact, we can use the new side condition
Therefore, if
, then we apply the new boundary condition (
11) and get
by
In both cases, for a positive value of
, we get the value of
h given by
A solution of (
1) is determined when the value of
is obtained from (
13). If
and
are fixed, then
is a function of
only, i.e.,
where, in general, the functional form of
is not known. Thus, we are interested in the zeros of the “transformation function”
This function is defined implicitly by the solution of the IVP (
9).
Along the lines of the analysis sketched above, the ITM can be defined as follows: the original BVP is embedded into (
5) by fixing non-vanishing values of
and
; starting with suitable values of
and
a root-finder method, secant, regula-falsi, quasi-Newton or bisection, is used to define a sequence
for
. At each iteration, a related sequence given by
for
is defined according to (
14); suitable termination criteria have to be used to verify whether
as
; a numerical approximation of
can be obtained by rescaling the numerical solution
corresponding to
.
We are now ready to present the iterative method of solution in the form of an Algorithm 1.
| Algorithm 1: The iterative algorithm. |
1. Input , , , , .
2. ; repeat through step 5 until condition is satisfied.
3. Solve (9) in the starred variables on .
4. Compute by (12).
5. Use equation (14) to get .
6. Rescale according to (6).
|
The above algorithm defines an ITM for the numerical solution of the class of problems (
1).
4. The Transformation Function
In this section, we provide some guidelines for the definition of
Let us define the function
by considering
and
as variables. Of course, for different values of these variables, we obtain different transformation functions. In any case, the analysis proposed in the previous section does not depend upon the choice of the values of
and
. A sensitivity analysis for the dependence of
with respect to
and
is not necessary because the ITM is defined for fixed values of these variables. As a consequence, once we have fixed the values of
and
, it is unimportant if we use only approximations of these values.
Moreover, by the proof of the theorem above, we know in advance that every real zero of the transformation function belongs to and, therefore, we can restrict the domain of to whereupon its range will be reduced to . We remark that the values of and can always be chosen to consider only positive values of .
On the other hand, the sensitivity of (and consequently of ) with respect to is of paramount interest. In fact, the numerical determination of the roots of is a well-conditioned problem if and only if at the root is bigger than the machine rounding unit (a simple proof of this statement is possible under suitable regularity conditions on ). Therefore, it is relevant to verify the sensitivity of at each zero. Of course, since is not given explicitly, we cannot evaluate its sensitivity directly. Hence, monitoring of the sensitivity will require an increase in the computational cost. A simple procedure is to apply the secant method as the root-finder because in this case, we compute a finite difference approximation for the first derivative of in each iteration. Some caution has to be used because finite difference approximations of derivatives are prone to rounding errors that, for really small increments, could dominate the approximations.
Let us consider the definition of
in (
10) or in (
12), since the initial conditions are invariant with respect to the extended scaling group (
6),
must have the following functional form
so that
In other words, depends on , instead of only. This can be used when the zeros of the transformation function are very close to one endpoint of its domain. In particular, we can modify the value of , or both values to define a function with more amenable zeros.
5. Numerical Tests and Results
In this section, we test the ITM with respect to the existence and uniqueness question and obtain a numerical solution for the given BVP.
5.1. Sakiadis Problem
In order to apply the ITM to (
2) we introduce, see Fazio [
39], the extended problem
In (
15), the governing differential equation and the two initial conditions are invariant, whereas the asymptotic boundary condition is not invariant, with respect to the extended scaling group
Moreover, it is worth noticing that the extended problem (
15) reduces to the Sakiadis problem (
2) for
. This means that in order to find a solution of the Sakiadis problem, we have to find a zero of the transformation function
where the group parameter
is defined by the formula
and to this end we can use a root-finder method.
Let us notice that
and the transformation function are defined implicitly by the solution of the IVP
In particular, we are interested to compute
, where
is a suitable truncated boundary, an approximation of the asymptotic value
, which is used in the definition (
12) of
.
It is evident that our numerical method is based on the behaviour of the transformation function. Our interest is to study the behaviour of this function with respect to its independent variable. We notice that because of the two terms
, which have been introduced in the modified boundary conditions in (
15), we are allowed to consider only positive values of
.
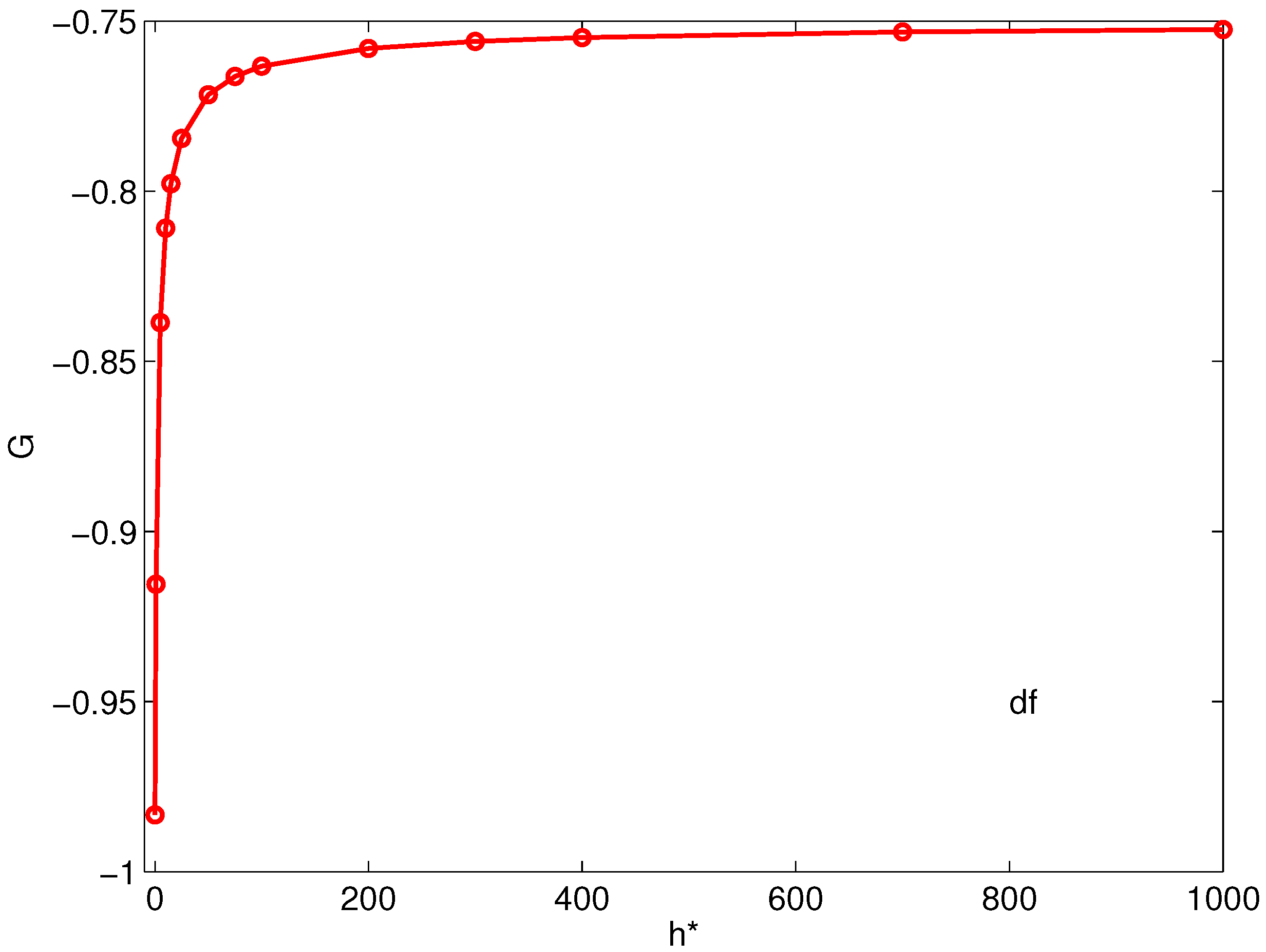
From our numerical study concerning the dependence of
with respect to the missing initial condition
we have used the results plotted on
Figure 1 and
Figure 2. Each o-symbol represents a numerical solution of the IVP (
19) with the corresponding value of
. The solid line joining these symbols is used to show the behaviour of the transformation function. By considering the results reported in
Figure 1, we realize that the missing initial condition cannot be positive.
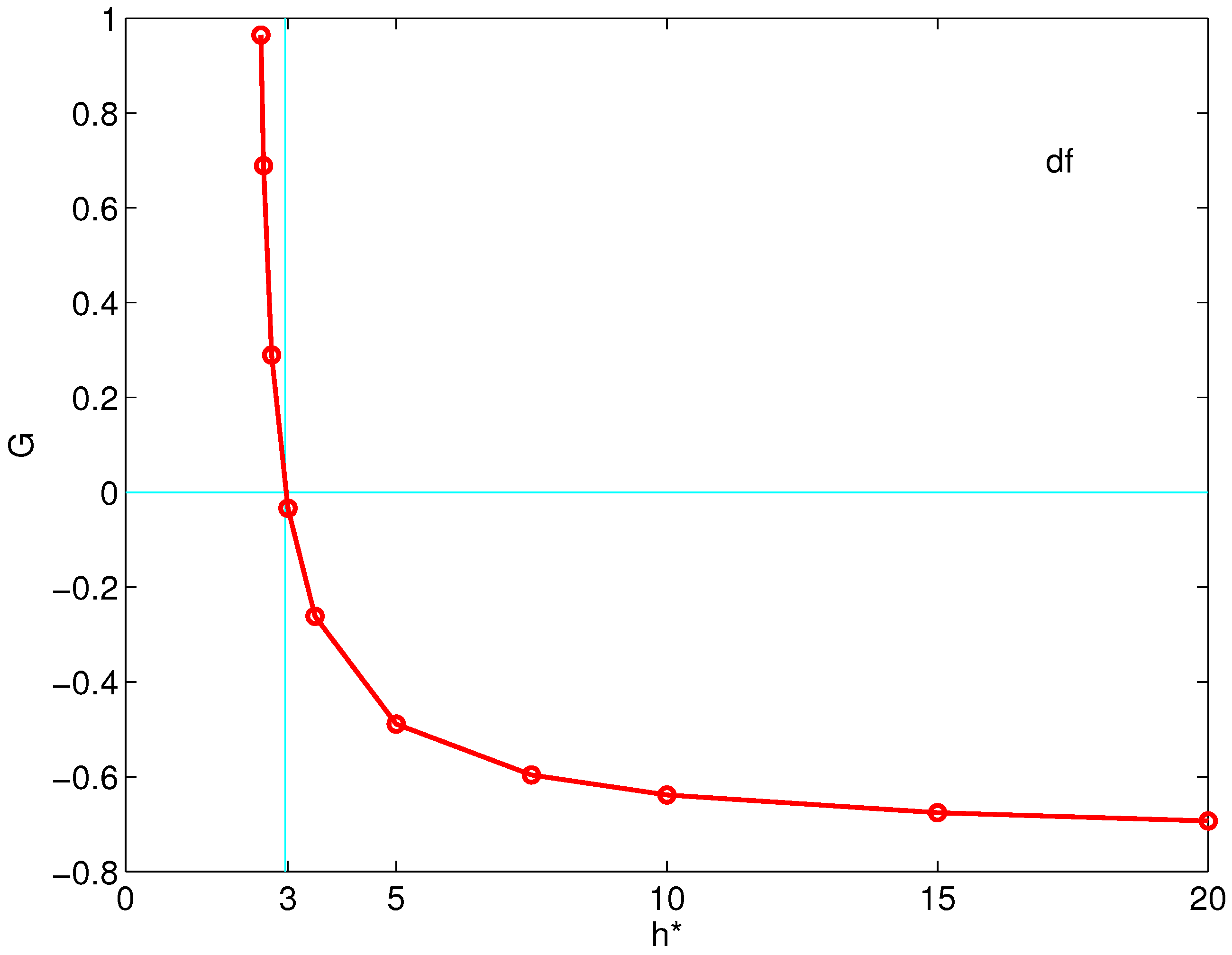
For a negative missing initial condition, the numerical results are shown in
Figure 2.
It is evident from
Figure 2 that the transformation function has only one zero and, by the theorem proved above, this means that the considered problem has one and only one solution. Moreover, we remark that the tangent to the
function at its unique zero and the
axis define a large angle. From a numerical viewpoint, this means that the quest for the
corresponding to
is a well-conditioned problem.
As far as the numerical results reported in this section are concerned, the ITM was applied by setting the truncated boundary . Moreover, these results were obtained by an adaptive fourth-order Runge–Kutta IVP solver. The adaptive solver uses a relative and absolute error tolerance, for each component of the numerical solution, both equal to . Here and in the following, the notation means a double-precision arithmetic.
The initial value solver was coupled with the simple secant root-finder with a convergence criterion given by
The implementation of the secant method is straightforward. The only difficulty we have to face is related to the choice of the initial iterates. In this context, the study of the transformation function of
Figure 2 was helpful. In
Table 1, we list the iterations of our ITM.
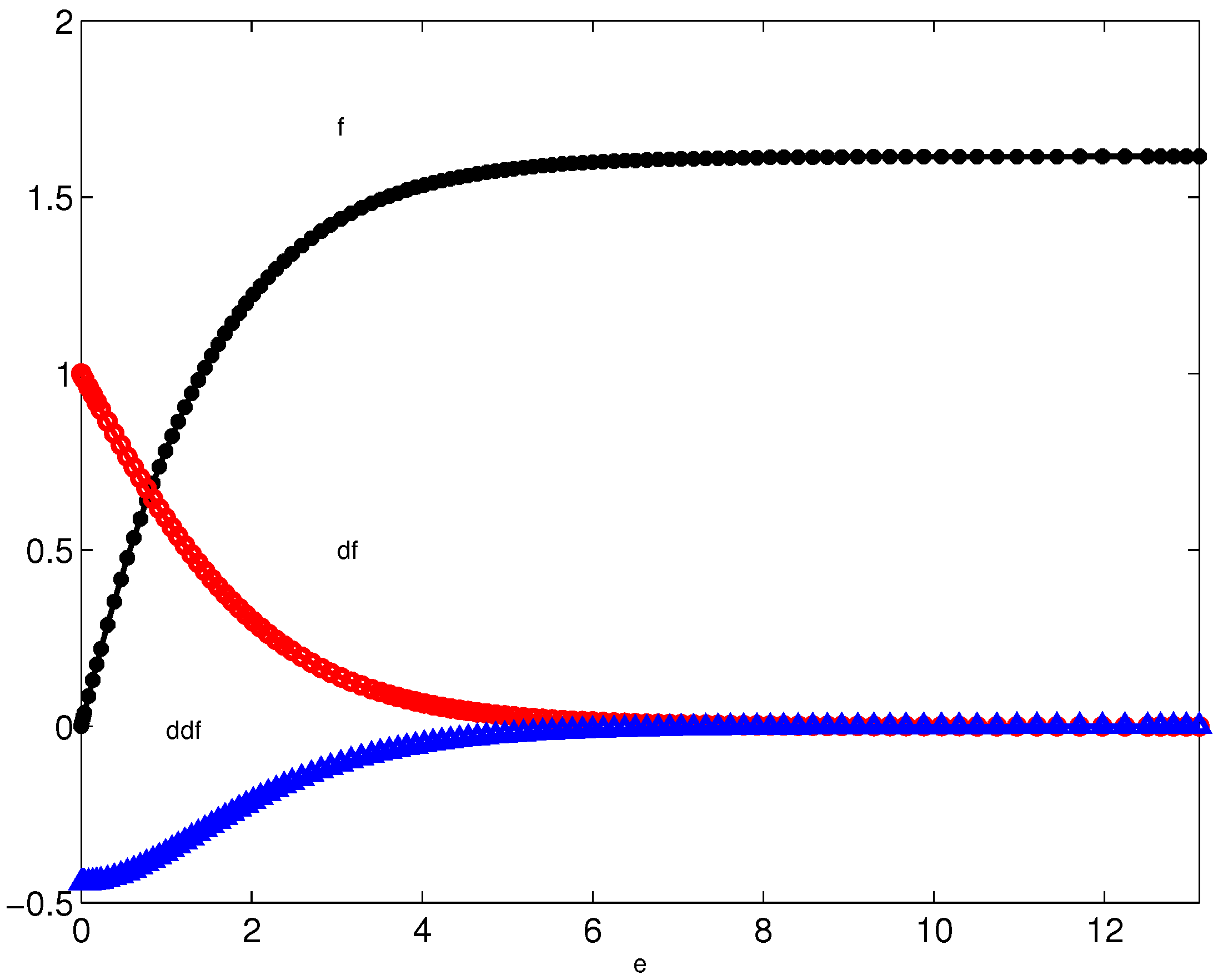
The last iteration of
Table 1 defines our numerical approximation that is shown, for the reader’s convenience, in
Figure 3. This solution was computed by rescaling, note that by rescaling we get
, and this means that we have reduced the computational cost, where the chosen truncated boundary was
in our case.
5.2. The Falkner–Skan Model
In order to apply an ITM to (
3), we have to embed it into an extended model and require the invariance of this last model with respect to an extended scaling group of point transformations. This can be done in several ways that are all equivalent. In fact, the modified model can be written as
and the related extended scaling group is given by
where
is a parameter. In the following, we set
; for the choice
see [
40]. In [
40], a free boundary formulation of the Falkner–Skan model was considered and numerical results were computed for the Homann flow (
) as well as for the Hiemenz flow (
).
From a numerical point of view, the request to evaluate
cannot be fulfilled. Several strategies have been proposed in order to provide an approximation of this value. The simplest and a widely used one is to introduce, instead of infinity, a suitable truncated boundary. For the sake of simplicity, we apply, following Töpfer [
41], some preliminary computational tests to find a suitable value for the truncated boundary.
At each iteration of the ITM, we have to solve the IVP
Table 2 and
Table 3 list the numerical iterations obtained for a sample value of
. We notice that we solve an IVP governed by a different differential equation for each iteration because the Falkner–Skan equation is not invariant under every scaling group of point transformations. As a first case, we have chosen
. The data listed in
Table 2 and
Table 3 have been obtained by solving the extended Falkner–Skan model on
by setting
respectively.
In both cases, we achieved convergence of the numerical results within seven iterations. Let us now investigate the behaviour of the transformation function.
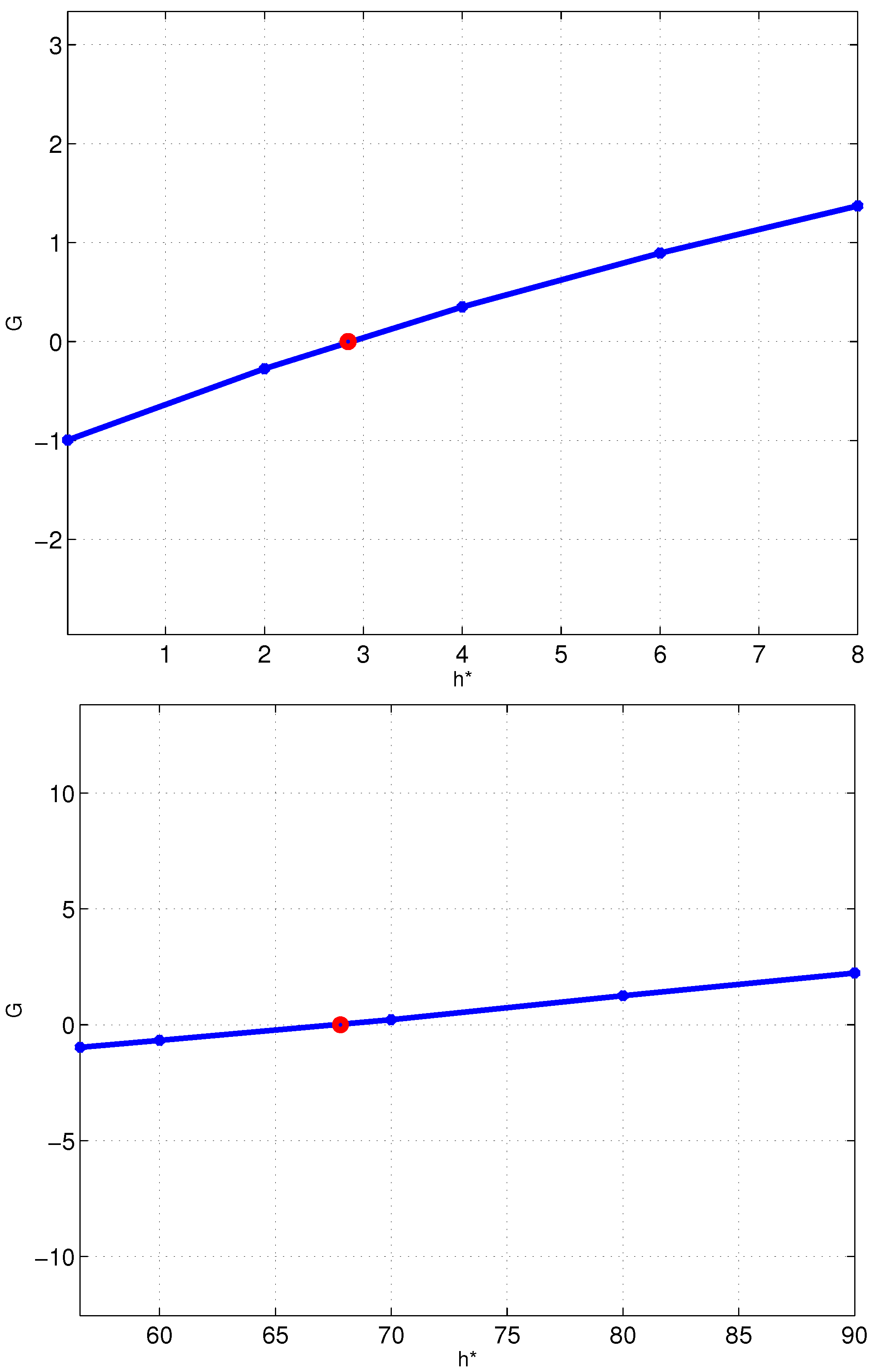
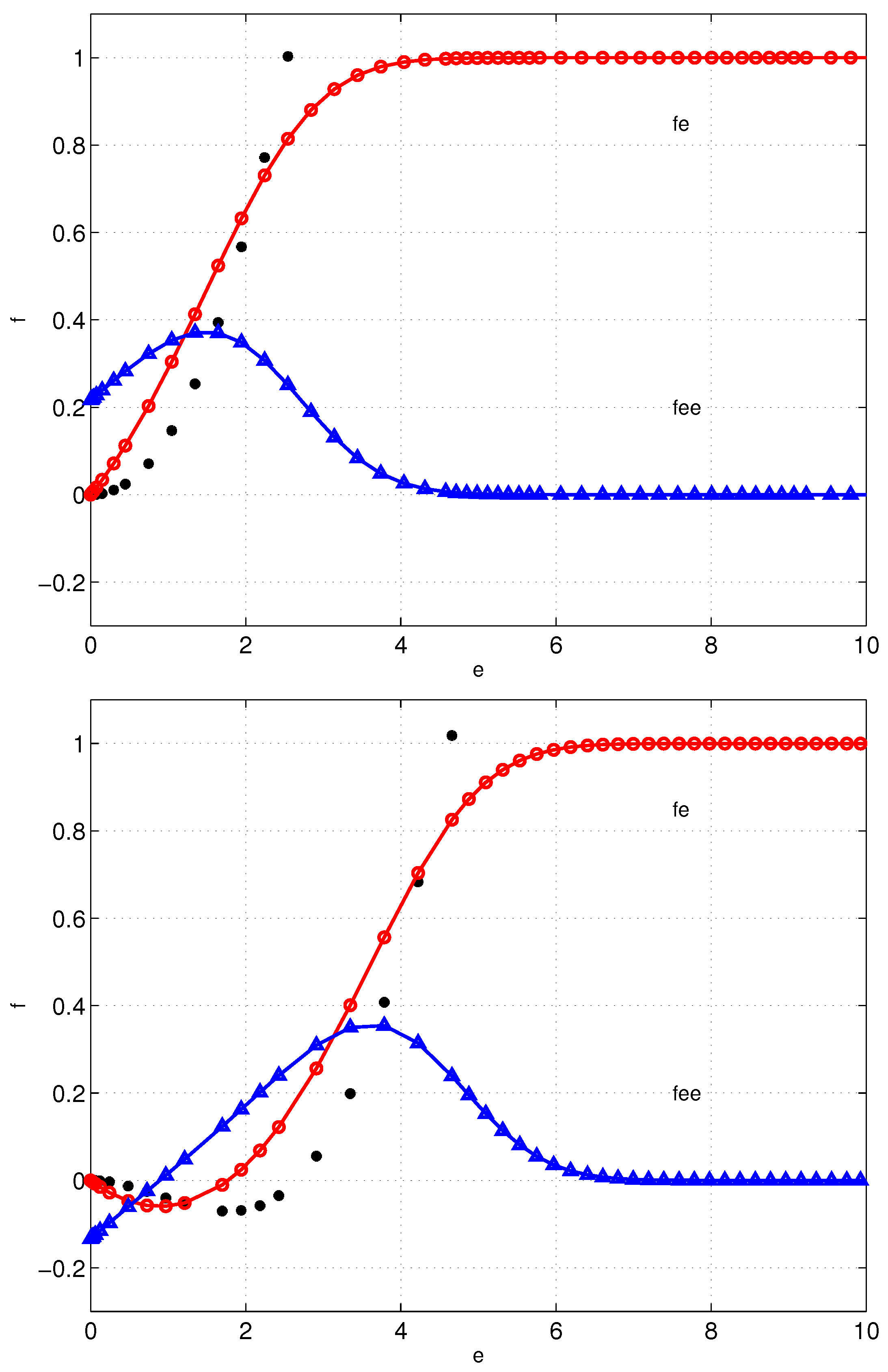
Figure 4 shows
with respect to
for the two cases reported in these tables.
The unique zero of the transformation function is marked by a circle. The same scale has been used for both axes. As it is easily seen, in both cases, we have a monotone increasing function. We notice on the top frame, corresponding to normal flow, that the tangent to the function at its unique zero and the axis define a large angle. This is important from a numerical viewpoint because in such a case, we face a well-conditioned problem. On the other hand, this is not the case for the function plotted on the bottom frame of the same figure. The meaning is clear, reverse flow solutions are more challenging to compute than normal flow ones.
Figure 5 shows the results of the two numerical solutions for a different value of
, namely
.
In the top frame, we have the normal flow and in the bottom frame, we display the reverse flow solution. In both cases, the solutions were computed by introducing a truncated boundary and solving the IVP in the starred variables on with , in the top frame and , in the bottom frame. In this case, we achieved convergence of the numerical results within eight and seven iterations, respectively. For the sake of clarity, we omit to plot the solutions in the starred variables computed during the iterations. Moreover, we display the solutions only .
As far as the reverse flow solutions are concerned, in
Table 4, we compare the missing initial condition computed by the ITM for several values of
with results available in the literature.
The agreement is really very good. It is remarkable that among the studies quoted in the introduction, only a few reported data related to the reverse flow solutions.
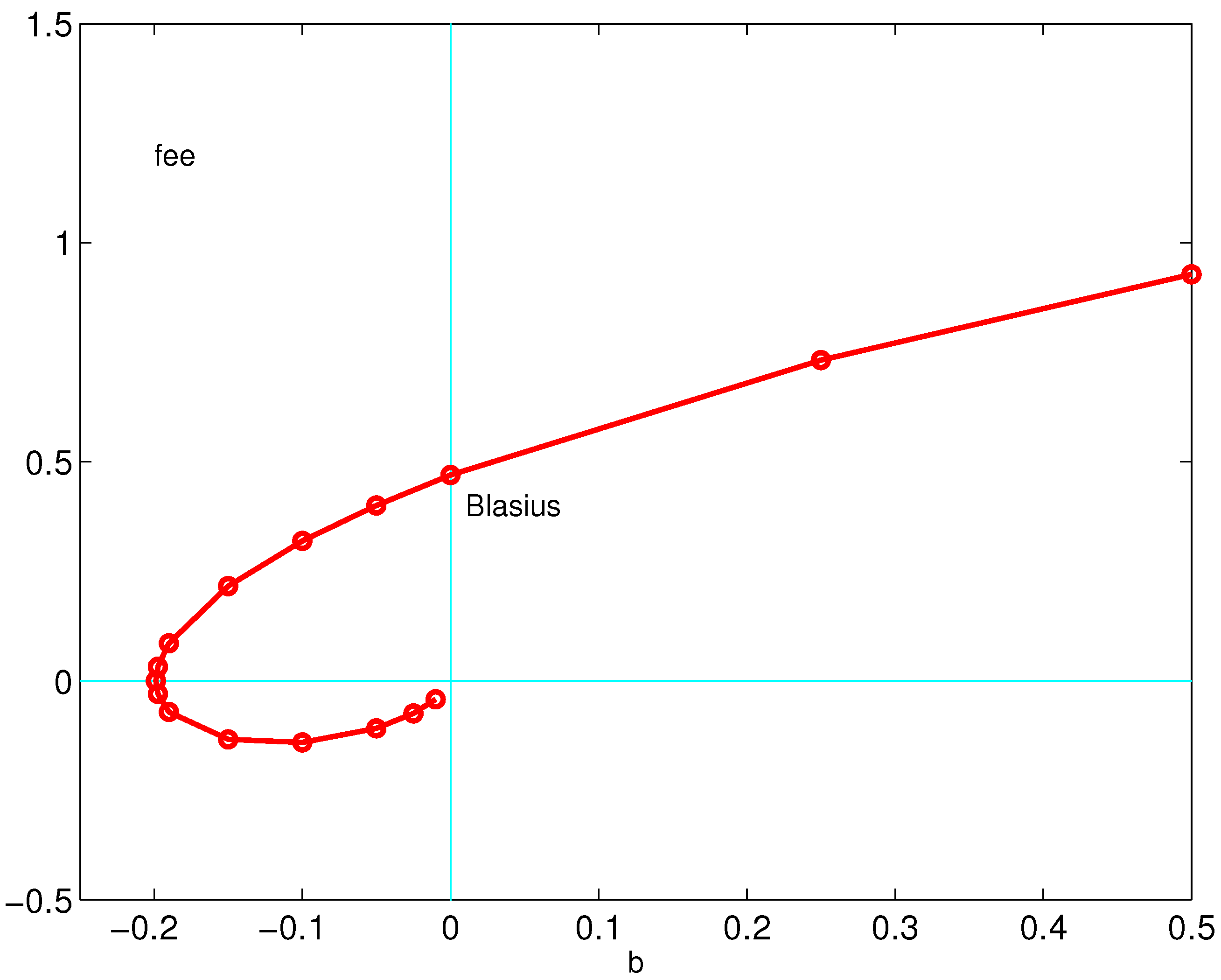
In
Figure 6, the behaviour of missed initial condition versus
is plotted. The solution found by the data in
Table 3 is plotted in this figure, but not the one found in
Table 2 because this is very close to the Blasius solution. A good initial choice of the initial iterates of
, for a given value of
, is obtained by employing values close to the one used in a successful attempt made for a close value of
. It is interesting to note that, for values of
, the ITM continued to iterate endlessly, whichever starting values for
are selected.
Our extended algorithm has shown a kind of robustness because it is able to achieve convergence even when, for a chosen value of , the IVP solver stops before arriving at the selected truncated boundary, obtaining an incorrect value of . On the other hand, the secant method gives an overflow error when this happens for two successive iterates of .
The value of
, corresponding to a separation point at
, can be found by the ITM by considering
as a continuation parameter. In
Figure 7, we plot the unique solution for the limiting value
, where
is given by Equation (
4).
Let us notice that this is a normal flow solution.
The results reported so far have been found by a variable order adaptive multi-step IVP solver that was coupled with the simple secant method. The adaptive solver uses a relative and absolute error tolerance, for each component of the numerical solution, both equal to
. As is well known, the secant method is convergent provided that we select two initial iterates sufficiently close to the root, and its convergence is super-linear with an order of convergence equal to
. As far as a termination criterion for the secant method is concerned, we enforced the conditions
with
.
For other problems, in boundary layer theory, admitting more that one solution or none, depending on the value of a parameter involved, see [
42] or [
43].
6. Final Remarks and Conclusions
In this paper, we define an ITM to provide numerical evidence for the existence and uniqueness of a solution of BVPs defined on infinite intervals on the basis of the theorem proved in
Section 3. The main point is to establish whether the introduced transformation function has only one real zero or not. From a numerical viewpoint, several computations may be necessary to understand and to characterize the behaviour of
. For the proposed numerical test, the transformation function was calculated at test-points, while at some points, a root-finding method was used. In the process, we tried to bracket the roots of
. In this way, it was possible to obtain numerical results that are in very good agreement with the values available in the literature. By setting different values of
and
, we get a different transformation function and consequently, we must bracket its zeros once again.
Of course, the asymptotic boundary condition is not easily used numerically and for the sake of simplicity, we have chosen to replace it with the same condition at a suitable truncated boundary. A recent successful way to deal with such an issue is to reformulate the considered problem as a free BVP [
44]. Recently, Zhang and Chen [
36] have used a free boundary formulation to compute the normal flow solutions of the Falkner–Skan model in the full range
. They applied a modified Newton’s method to compute both the initial velocity and the free boundary.
In conclusion, the main results of the present investigation are the following: we have defined a theoretical basis for the ITM; within the definition of the method, we emphasized a numerical test for the existence and uniqueness of the solutions of BVPs defined on infinite intervals; the ITM computes numerical results that are in very good agreement with the correct values.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}