1. Introduction
It is an undoubted fact that the design of more reliable and accurate algorithms to compute the approximate values to the sine and cosine functions is one of the most fascinating topics of the constructive approximation of functions. This is clearly motivated by numerous applications of these trigonometric functions ranging from mathematics, physics to engineering.
The use of polynomial approximations plays a key role in computing values of the sine and cosine functions, as well as other elementary functions. The most commonly used polynomials are Taylor, Chebyshev, and Remez. Let us briefly mention an early historical fact related to approximating the trigonometric functions. That is the formula proposed by Bhaskara in the 7th century:
which is now explained clearly and logically (see [
1]). The explanation is based on the view of interpolation by polynomials and rational functions.
For these days, with a rapid development of technology and computer science, there has been great effort to build hardware and software algorithms for evaluating values of the elementary functions, especially the trigonometric functions, to meet an essential need in scientific computations, signal processing, telecommunication and computer graphics [
2]. Among these algorithms is the most important and fundamental one called the CORDIC algorithm. The name CORDIC is an acronym for Coordinate Rotation Digital Computer. This is a computing technique for solving the trigonometric relations that consist of plane coordinate rotation, Cartesian and polar coordinates. Details on CORDIC and developments on algorithms for evaluating elementary functions can be found in the excellent monograph by Muller [
3] Chapter 7, and also [
4,
5,
6,
7,
8].
It is worth mentioning that the desirable accuracy of computed transcendental functions mainly depends on the demand of users and/or practical scientific use. On the one hand, it would usually suffice to numerically solve real-world problems with an accuracy to machine precision. This is the reason that the majority of present computing software programs such as MATLAB, and its Chebfun software package, developed by Trefethen and his team [
9], aims to support. On the other hand, there has always been an imperative need to seek for simpler and more efficient algorithms with higher accuracy as the interest in improving scientific calculation method itself or from other sources of practical demand. This is purely our intention when writing the present article. The design and development of our algorithms stem from the fact that we are able to easily work with higher-degree polynomials (even degrees of thousands or millions [
10] Chapter 1) due to the increasing complexity of computer applications.
The goals of this paper are twofold. Firstly, we present an algorithm that gives pointwise approximate values of the sine and cosine functions at any rational angle with a desired precision. Secondly, our biggest contribution to novelty is the piecewise approximation procedure with an arbitrary small absolute error applied to these trigonometric functions. To this end, we introduce a special partition that can take the advantage of dividing an interval into appropriate subintervals for the approximation process. Our construction is merely based on the lookup table-like storage of approximate values of Pi (the number ). In some computer algebra systems, we can do this with built-in commands such as evalf[n](Pi) from MAPLE, vpa(pi,n) from MATLAB and N[Pi,n] from MATHEMATICA.
In principle, approximating the value
by the Taylor polynomial of order
n at a point
as
is meaningful when the point
satisfies
and all the coefficients
can be explicitly calculated. Such a point can be chosen as
, where
and
. We will choose
k to get the inequality even better
. Because we only have rational approximate values of
p, this challenges us with several practical questions to be solved: how to evaluate errors arising from replacing
p with its approximate value
and how to keep
unchanged with this change of value of
p? In addition, we also need an efficient mechanism to access rational approximate values of
p more enough to reach an acceptable or desired precision. Fortunately, more and more precise values of Pi have been updated from the projects of computation of special numbers (see [
11], for instance), and these values are now supplied conveniently and efficiently for use by present computer algebra systems. The current record of the longest decimal number computed for Pi has been 13.3 trillion digits (date announced: 8 October 2014), held by an anonymous programmer known online as “houkouonch”, and will be certainly broken later.
The paper is organized as follows. In
Section 2, we define the steps to obtain Taylor polynomials for approximating values of the sine function with an absolute error less than a given tolerance. We then, in
Section 3, provide appropriate regulations to show that it is possible to keep coefficients of the approximate Taylor polynomials unchanged when
is replaced with its approximate value
. The error analysis is presented in the same section in which the properties of special functions Gamma and Modified Bessel are used. We arrive at our algorithms for pointwise approximating values of the sine and cosine functions, and for piecewise approximating on any interval
in
Section 4 and
Section 5. To demonstrate the performance of our methods,
Section 6 is devoted to an application of numerical integration. Finally, some concluding remarks are discussed in the last section. For our purpose, we use MAPLE to implement our algorithms, and demonstrate numerical and graphical results.
3. Regulation
In practice, we are only provided with approximate values of
. Assume that such a value is
and let
. If
, we use the formula (
5) with
and we have the approximation
with the accuracy of
, where
n is determined from (
2). Therefore, we consider from this point on any rational number
x such that
and we then have that
For an initial setting, we assume that
satisfies
for a given
.
Because the formulas (
4) and (
5) depend on the distance between
and
according to the choice of
, we need to choose
so that
will not change its values. This can be attained when
or equivalently
Since
(
7) is satisfied if and only if
Since
, we then have (
8) if
simultaneously satisfies the following inequalities
Before proceeding any further, we emphasize here that we can set as the approximate value of p with the accuracy up to significant digits when to prevent inexactitude from rounding-off rules. Such an approximate value of p can be declared by, for instance, evalf[m + 3](Pi/2) in MAPLE. As a convention, when the output m has been found for to satisfy , we then set with evalf[m + 3](p).
Finally, we recall here the cases of choosing
and assume some supplementary requirements for
to make
unchanged when replacing
p with
. If
and due to
we also have
when
and we then choose
in this case. Similarly, if
, then we also have
when
and we choose
. In particular, if
, then we also choose
and note that (
9) and (
10) are obviously satisfied in this case.
Let us take an important notice that: (
11) implies (
10), and (
12) implies (
9). Thus, to find an appropriate value of
and then choose
, we first require
by determining a number
such that
Then,
can be chosen to satisfy simultaneously (
9) and (
11), which is
or (
10) and (
12), which is
depending on
or
, respectively. To prove the existence of such a
, we need some results from the notion of sequence limit. This result is an important basis of our approximation algorithm.
Supposing that we have found
satisfying (
13), then we choose
=
evalf[m0 + 3](p) and let
. Letting an index
i take its initial value
. If
, then we choose
; otherwise, we consider the following process. To choose
that satisfies simultaneously (
6), (
9), (
11) or (
6), (
10), (
12), from (
14) or (
15), we check
or
If both (
16) and (
17) could not occur, we go to the next step by setting
,
=
evalf[mi+1 + 3](p) and
. Then, we check again (
16) and (
17), but with
and
for this time. Continuing this process, we go to the following conclusion:
One of either (
16) and (
17) first occurs at some step
k, and assume it is (
16). Hence, we have
(and also
). Then we choose
(
). Similarly, we have
(and also
) and we choose
if (
17) occurs.
Both of (
16) and (
17) could not occur at any step. Then, we obtain the infinite sequences
,
=
evalf[m0 + 3 + i](p) and
,
, such that
and
Now, we show the second item of the conclusion cannot be true. Because
, then
,
. Since
, there exists an integer
such that
for all
, hence
for all
. Therefore,
If
, then
hence the left side of the inequality (
18) leads to ∞ as
, and this is a contradiction. If
, by a similar argument, we also derive a contradiction from (
19).
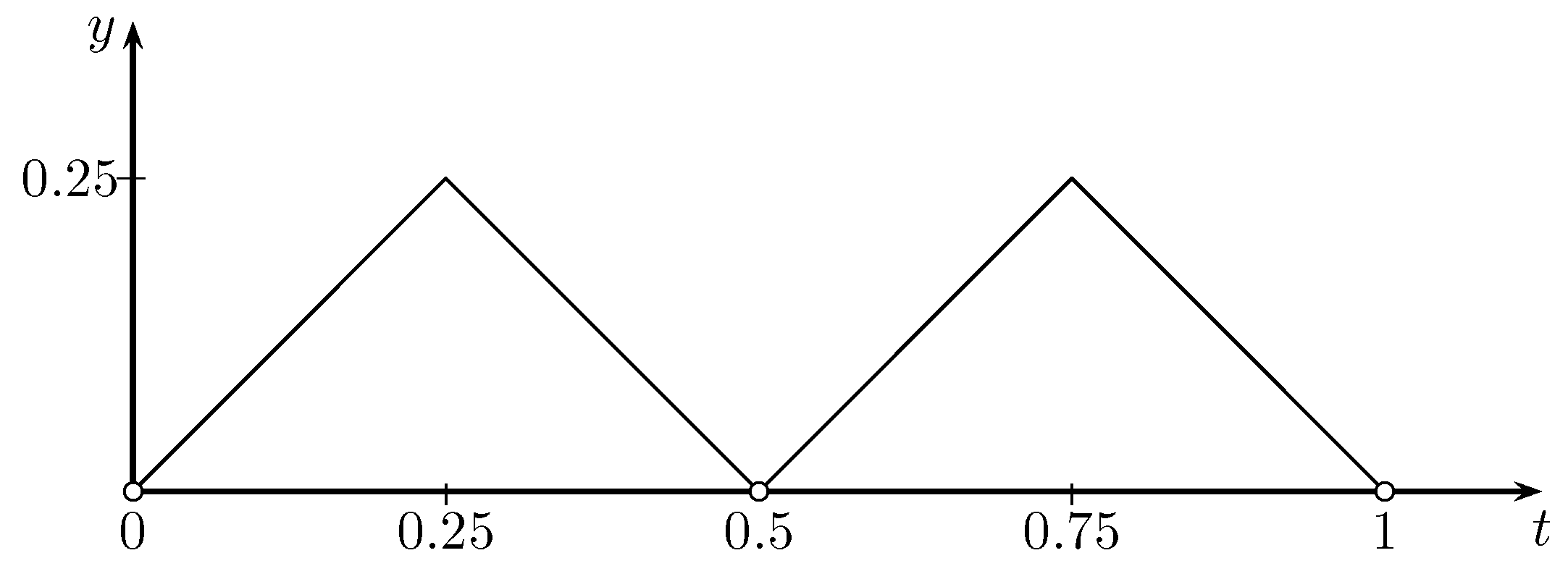
There is one more question that should be considered explicitly. What is the maximum value of
k that we may access in the calling sequence
evalf[m0 + 3 + k](p)? We provide here an analysis of this possibility. We set on the intervals
and
the functions
and
, respectively, such that
and
Then, we define
and give its graph in
Figure 1.
Now, reaching (
16) or (
17) at the step
k can be expressed as
Because
, we can attain this when
Taking integral values from
, the variable
k makes the value of the right side of (
20) increase very fast, whereas the positive values of
slightly change when
k increases. We also have the estimate
for all
. Thus, the minimum value of
satisfying (
16) or (
17) is governed by
. In practice, since
and
r are not too large, we may always determine such a value of
.
On the other hand, if we find a sequence of rational numbers
converging to
and a strictly increasing sequence of natural numbers
such that
we can determine
, following the above steps without using the command
evalf (or other equivalent commands).
According to the choice of
, we always have
. Now, we check that
for all choices of
. In the cases of
or
, we also have
or
and easily check that
or
. In the case
, since (
6), (
9) and (
10) are all satisfied, we have
and need to check (
21) directly. Indeed, we can write
hence
We formalize the above discussion by the following lemma.
Lemma 1. For every rational number x, there exists an integer and a rational approximation of such that , and or , depending on or , respectively. Moreover, the Taylor polynomial of the sine function at can give the approximation with the accuracy up to , where r is a given positive integer and the degree of is determined by(
2)
. In practice, since we cannot use
from (
4) or (
5) to approximate the value of the sine function at
x, we replace
with
instead. Such a changed polynomial can be either
depending on
odd or even, respectively. Because
, we derive the estimate
from (
2). Now, we need to estimate
, which we shall call the
practical error.
Firstly, we choose the polynomial (
22) and try to make an estimate for
or
Since
(
24) can be written as
hence we obtain the estimate
Letting
, from (
21) and (
25), we derive
To estimate the sum in (
26), we will use inequalities related to factorial numbers, so we need some properties of the generalized factorial function, the Gamma function:
has been proven to be a log-convex function on the interval
; thus, for
we have
(see [
12] Section 2). In addition, for a non-negative integer
n, we have
, and for
,
with integers
satisfying
, we derive the following inequality from (
27)
From (
26) and (
28), we can write
due to
.
To obtain the desired estimate of
, we use an approximate value of the Modified Bessel function of the First kind
which is
according to the approximation formula in ([
13] Section 3). Moreover, we have the estimate
that we now check only for
. Indeed, if
, then
, hence
; if
, we have
or
. These estimates for
lead to
Finally, from (
28), we derive
Similarly, if the polynomial (
23) has been chosen, we are led to the estimate
In this case, applying (
27), we obtain the inequality
To estimate the right-hand side of (
31), we use an appropriate inequality of Lazarević and Lupaş in ([
12] p. 95–96), stated in the form of
where
and
. Applying (
32) for
(
) and
, we easily obtain the inequality
Combining (
30), (
31) and (
33), we finally get the desired estimate
Thus, both of approximate polynomials (
22) and (
23) satisfy the same inequality for the practical error; that is
Finally, for a real number
x and its rational approximation
, we have the following estimation
where
is obtained from
, as indicated in Lemma 1, but for
instead. If
r is replaced with
in (
2) and (
6), and
, then
.
To sum up, we state our main result in this section by the following theorem.
Theorem 1. Let x be a real number and be a rational approximation of x such that , where r is a given positive integer. Then, from Lemma1 applied to , there exists a polynomial having the form of (
22)
or (
23)
that gives the approximation . 4. Algorithm for Pointwise Polynomial Approximation
Given a rational number
x and an integer
, we will construct an algorithm to evaluate the approximate value
a of
so that
is less than an arbitrarily small tolerance, and to display the result in the correct number
h of significant digits. The first task can be completed by the steps in Algorithm 1, following the steps as indicated in
Section 3, above Lemma 1. This algorithm can be converted into a MAPLE procedure called
ApproxSine that takes the two arguments
x and
r. The output of
ApproxSine(x,r) is
a with
,
. This estimation for
is obtained when
r is replaced with
in (
2) and (
6). Before completing the second task, we note that the accuracy up to the
r-th decimal digit after decimal point is in general quite different from
r significant digits. For instance, if
and
, then
and
evalf[4](a) = evalf[4](b), but, if
and
, then
evalf[6](a) ≠
evalf[6](b), whereas
. Therefore, we should first count how many zero consecutive digits there are right after decimal point contained in the number
a =
ApproxSine(x,r), and assume that the number of such digits is
k, which is
(
). In fact, the number
k can be determined easily, for instance, by a simple
while-do loop in MAPLE as follows:
| > a:=ApproxSine(x,h): |
| > k:=0: |
| > while (abs(a)*10^k-1<0) do |
| > k:=k+1: |
| > end do: |
Then, the second task can be completed by displaying the output of
ApproxSine(x,k + h + 1) in
h significant digits, which is the calling
evalf[h](ApproxSine(x,k + h + 1)). Now, we can make another MAPLE procedure named
Sine to perform the second task when using
ApproxSine as its local variable. The calling sequence
Sine(x,h) returns an approximate value
a of
such that the correct number of significant digits of
a is equal to
h. In the following, we present Algorithm 1 as a pseudo-code algorithm as
| Algorithm 1 |
| Input:x (rational number), r (positive integer) |
| Output: with |
 |
Similarly, for approximating values of the cosine function, we use the Taylor polynomial of
:
where
and
The integer
is determined by the same way as the one in the previous sections and the index
k satisfies
due to
. Hence, depending on
even or odd,
is approximated by
or
respectively. Then, we have a similar algorithm to evaluate approximate values of
and a corresponding MAPLE procedure
Cosine taking the same arguments
x and
h. In the body of
Cosine,
ApproxSine becomes its local variable
ApproxCosine when the variable
a in
ApproxSine (as
a in Algorithm 1) is assigned to these corresponding values of
.
Cosine also returns approximate values of the cosine function in a given correct number of significant digits. In practice,
becomes
when
takes the position of
p, and again we can check the estimate
. As a convention, we will present all algorithms afterwards in a pseudo–code form and use corresponding MAPLE procedures with names to make calculations. Now, we implement our algorithms with some values of
x and
h, and the results of the calling sequences
Sine(x,r) and
Cosine(x,r) are given in
Table 1.
5. Algorithm for Piecewise Polynomial Approximation
We recall here what is needed for initial settings to the piecewise approximation process. For a given number
, we find an integer
such that the Taylor polynomial
at
,
, can be used to approximate
with the accuracy of
, where
r is a given positive integer. Because we only get rational approximate values of
p, we have found a way (as presented in previous sections) to determine such a value
, remaining the approximation
with the accuracy of
, where
is obtained from
by replacing
p with
. In addition, we have proved that
, or likewise
and
where
. In fact, more exactly, we have
and
for such a chosen
. Moreover, for every
, we can use
to approximate
because of
(note that
). Indeed, we have the estimate
and get the desired inequality when
or more strictly,
. However, this is obviously satisfied because
Therefore, we have the approximation
with the accuracy of
if we replace
r with
. This extension of our pointwise approximating result can be a starting point to construct a piecewise function
F that approximates the sine function on an interval
.
From most parts of Algorithm 1 (only without Step 2), we can derive a simpler algorithm that results in three objects k, and (respectively, , p and a in Algorithm 1) from an input number . For convenience, we will use the name FindPoint of a MAPLE procedure performing such an algorithm with one real argument, so its usage can be given in one of the forms: FindPoint(α) = [k,,], FindPoint(α)[1] = k, FindPoint(α)[2] = and FindPoint(α)[1] = .
Because the sine function is odd, we only need to find the function
F on
with
. In the cases of
and
, we may set
on
and
on
, respectively, where
and
n is determined by Algorithm 1. Therefore, it is sufficient to construct a piecewise approximate function
F on
when
.
On the other hand, from the choice of
in Algorithm 1 to approximate
, we now change it to
This choice is to guarantee the precision for our later construction of
F. Moreover, it is easy to check that if
are numbers such that
=
FindPoint()[2],
=
FindPoint()[2] then we have |α −
| < 0.8 and |β −
| < 0.8.
Firstly, we put
and similarly,
The cases of
and
are illustrated in
Figure 2.
Now, we consider the case
(or even
); then, we choose
on
because
as shown above for
. Next, we consider the case when
. We extend the approximation process to determine the next integer by setting
(
k0 +1 )
p0, and also
(
k0 + 1)
p0,
(
k0 +1 )
p0. Because
, by the choice of
, we must have
. Note that, from (
36), we also have
. If
, we then have cases that are illustrated in
Figure 3. It is obvious that we can set
on
, regardless of
or
. However, we will take different settings on the other intervals, depending on where
b is from
. These settings can be given in the following:
If
, we continue to put
In the case of
, we have the following choice for
F according to the different positions of
b from
:
Finally, continuing the above process, we obtain a finite sequence
,
, …,
such that
(
ki−1 + 1)
pi−1,
, and
. Then, we also gain two sequences
(
ki−1 + 1)
pi−1 and
(
ki−1 + 1)
pi−1,
. Before giving our settings for this general case, let us consider ending points of the approximate intervals by taking two consecutive nodes
,
. If we let
, then we have
, so that
To show the assertion of (
39), we refer to (
36) again and take the same arguments as above. The inequality (
39) explains why we can choose
F on
to guarantee the accuracy of
.
In short, by the setting (
36), when
with
(see
Figure 4), we have constructed the piecewise function
F that approximates the sine function on
(
) with the accuracy of
. After getting the finite sequences
,
,
and the function
defined as above, we choose
F as follows:
If
:
If
:
Although steps for construction of F have been presented, we give here an abbreviated algorithm, Algorithm 2, to specifically determine this function.
In Algorithm 2, the approximate Taylor polynomials
are derived from Algorithm 1 and given here as
or
depending on
odd or even. The polynomial
takes a similar expression, where
is replaced with
.
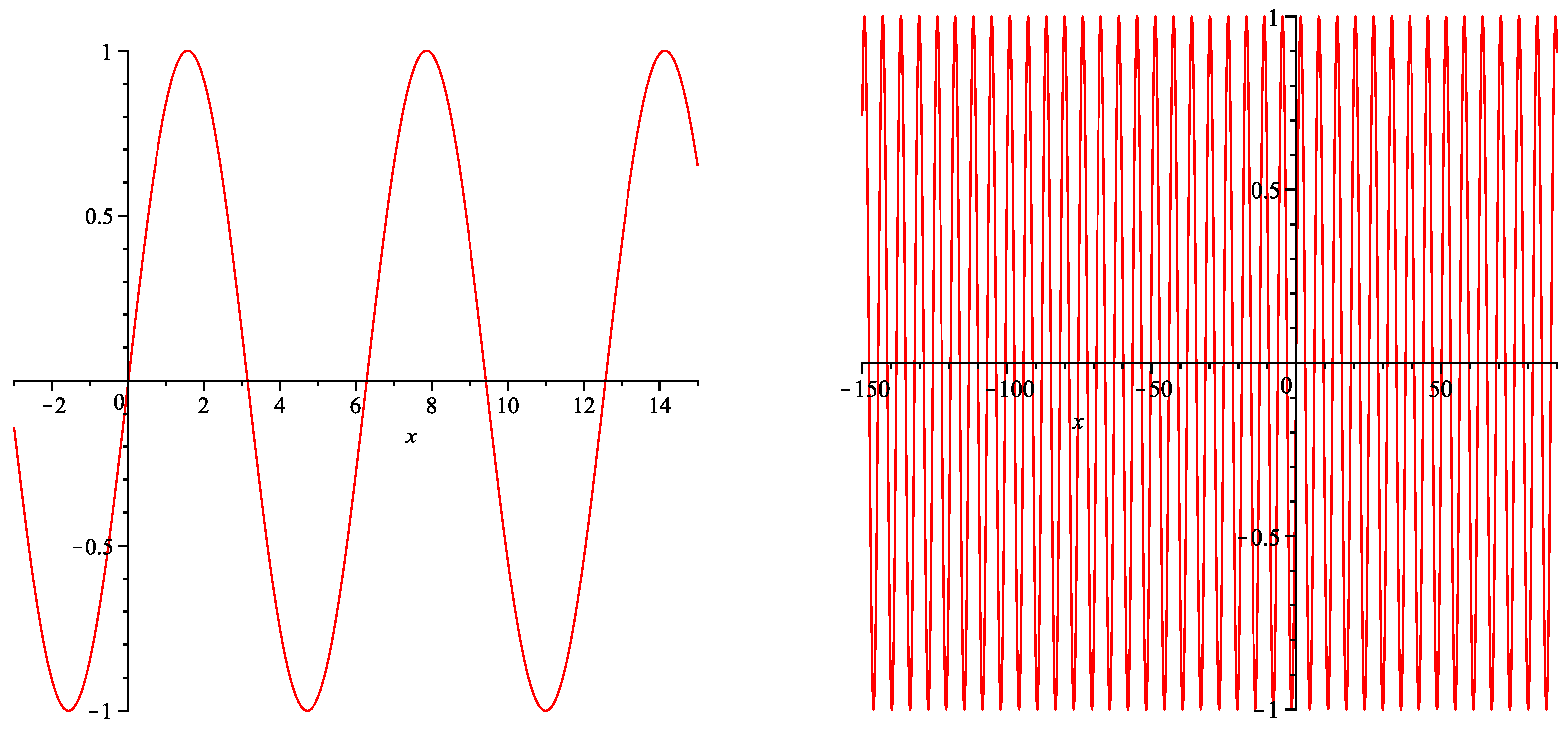
In
Figure 5, the graphs of
F on intervals
with different values of
r are depicted by a MAPLE procedure corresponding to Algorithm 2.
| Algorithm 2 |
| Input:FindPoint (the MAPLE procedure, mentioned above); (real numbers); r (positive integer) |
| Output: on with |
 |
To obtain a similar algorithm to approximate the cosine function, we just replace the functions
with
or
depending on
even or odd, and
with
Note that the cosine function is even, so we should regulate appropriately the function
F in Algorithm 2.
6. An Application of Numerical Integration
Suppose
is approximated by a polynomial
with the accuracy up to
on an interval
. Then, we will find an estimation of the absolute error for
and
with some natural number
s. One of the possibilities to compute
via
is given in ([
14] Lemma 1.3), but here we use our previously established results as follows. Firstly, we can write
where
and we also have
for all
. Hence, we have that
From this relation, we easily derive the estimate
Now, applying (
28), we obtain
and relying on the inequality ([
15] p. 93), we imply
Using (
44), (
45) and the formulas in [
15], such as
we attain the estimate
Finally, from (
43), (
46) and the formula for the sum of a geometric progression, we derive the following estimate
also due to
.
Thus, we have proven the result stated in the following lemma.
Lemma 2. Assume that is approximated by the polynomial on an interval with the accuracy up to , derived from the Taylor polynomial about , and , by replacing p with its rational approximation , as constructed in the previous sections. Then, ifis approximated bythe error has the following upper bound Because the upper bound of
in (
47) only depends on
r,
s, except the integral on the right side, we then easily imply the following theorem.
Theorem 2. Suppose an interval can be expressed as a finite union and is approximated by the polynomials on the intervals , , with the accuracy up to , where and . Then, if Q is an arbitrary polynomial andis approximated bythe error has the following upper bound Based on Algorithm 2, we have established a procedure, say
AppIntSin, to approximately compute the integral given in Theorem 2 with the desired accuracy.
AppIntSin’s arguments may take input values in order as for
a,
b,
r,
s and
Q, and we can even choose the value for
r to get the result satisfying a given tolerance. For instance, to have the estimate
, a positive integral value for
r may be chosen as to satisf
due to
and
.
Let us consider the following example. Find the approximate value of
with the accuracy up to
. We first derive
from (
49) with the settings
,
,
and
. Performing Algorithm 2 with
,
and
, we determine
,
,
and find the appropriate case (
41). Then, the calling
AppIntSin() gives us the desired approximation to
I, first put in symbolic form as
and then in numerical value
7. Conclusions
Motivated by the powerfulness and popular use of modern computer algebra systems in terms of its ease in programming and accessibility to the value of with a very high accuracy, simple and easily-implemented algorithms have been designed to approximate the trigonometric functions with an arbitrary accuracy by a means of Taylor expansion. We have provided a careful analysis of the proposed approach with numerical illustrations. Nevertheless, our initial intention is not to compare or surpass other well-developed and well-established existing algorithms in the research literature; rather, we emphasize on the simplification of our methods as a computational application of CAS for which we highlight below:
Approximating values of the trigonometric functions by Taylor polynomials with an arbitrary accuracy, taking the form of , .
Using a so-called spreading technique to switch the process of pointwise approximating to that of piecewise approximating all over an arbitrary interval.
Performing only arithmetics on very small values of finite rational numbers.
Only using one command of CAS to access approximate values of .
Our approximation method in Algorithm 2, utilizing the achievements of computing values of Pi with more and more exact significant digits and the power of current computer algebra systems, presents the special partition of an interval with nodes ’s, where and is an approximate value of . This is a great advantage for local approximation to values of the sine (or cosine) function f on each definite interval because ’s are all finite rational numbers. These nodes also play a role as adjoining centers of approximation, whereas the functional coefficients still take their normal values at .
Our procedure, corresponding to Algorithm 1, gives not only numerical results of great precision but also a remedy for mistakes in the use of some existing mathematical software programs when displaying wrong results with a small number n of significant digits (e.g., ). In such cases, the argument x’s to approximate are commonly close to ’s, .
In addition, Theorem 2 can be applied to look for desired estimates to the best -approximation of the sine function in the vector space of polynomials of degree at most ℓ, a subspace of .











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}