Dynamic Modeling and Control of an Integrated Reformer-Membrane-Fuel Cell System

Abstract
1. Introduction
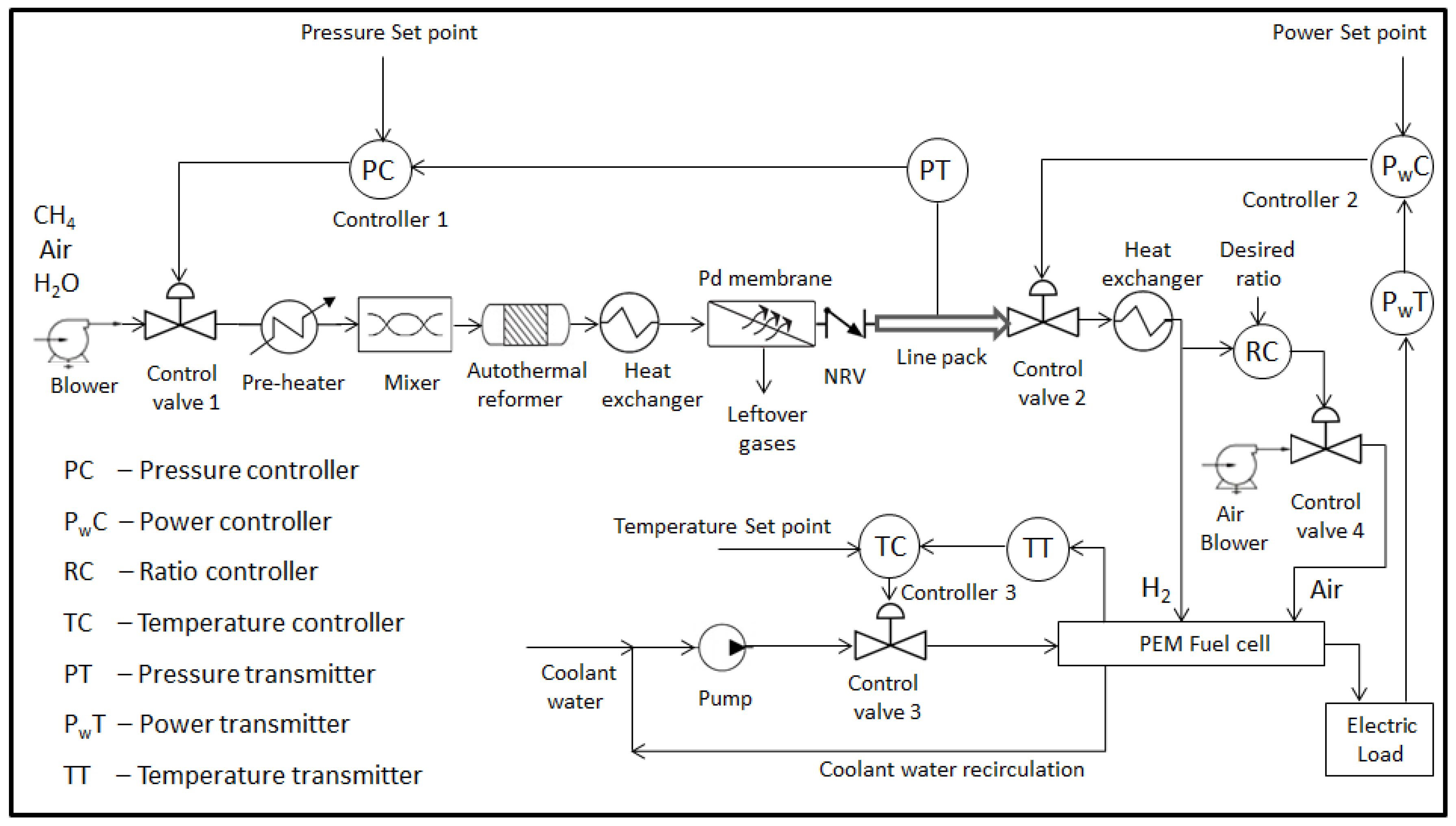
2. System Description
2.1. Fuel Processing Subsystem: Auto Thermal Reformer
Mathematical Model of Auto Thermal Reformer
2.2. Fuel Purification Subsystem: Palladium Based Membrane Separation
Mathematical Model of Palladium Membrane Separation
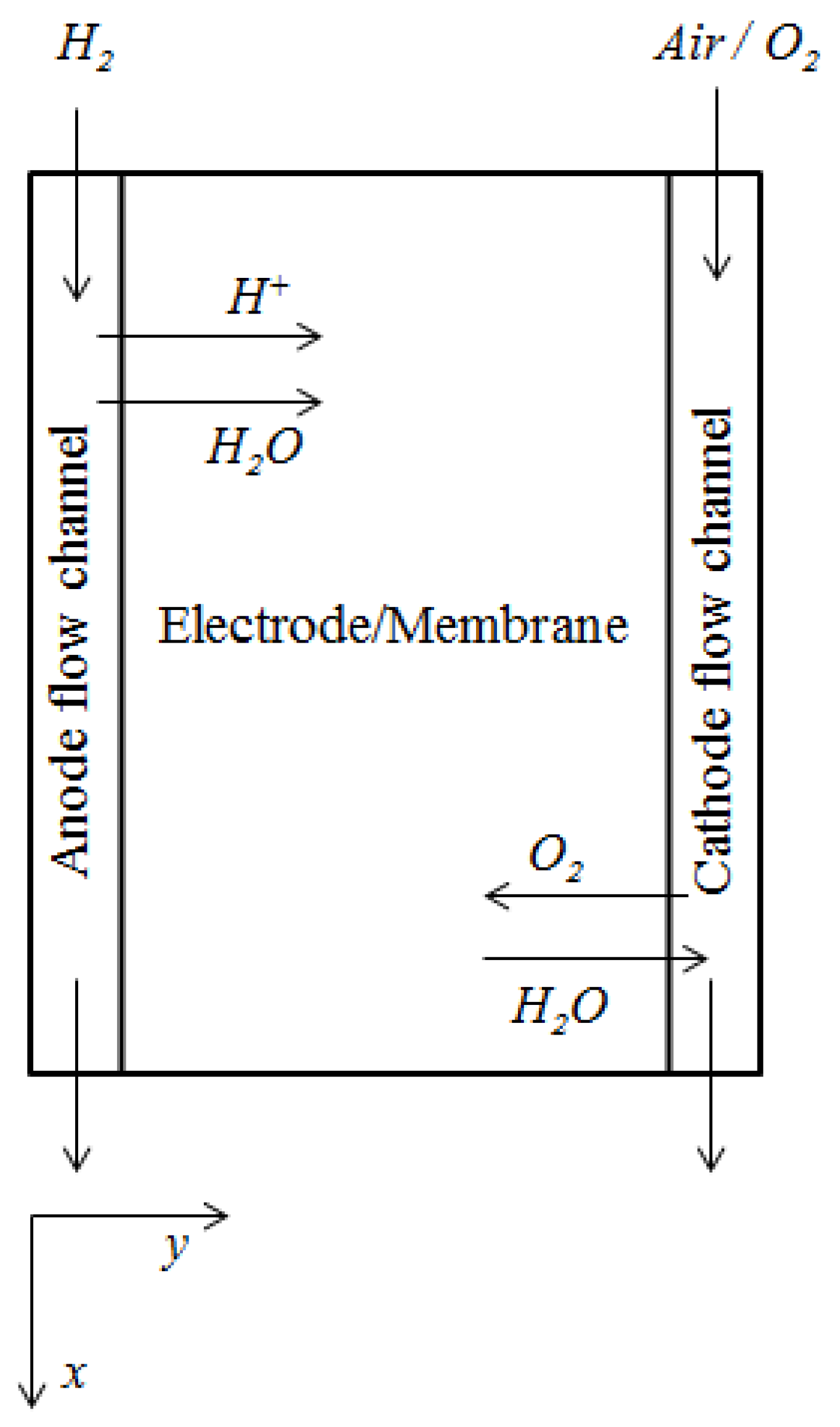
2.3. Power Generation Subsystem: PEMFC
Mathematical Model of PEMFC
2.4. Integrated Reformer Membrane Fuel Cell System
2.5. Numerical Solution of the Integrated System
2.6. Controllability Analysis and Choice of Pairing
3. Case Studies: Dynamic Analysis and Control of the Integrated System
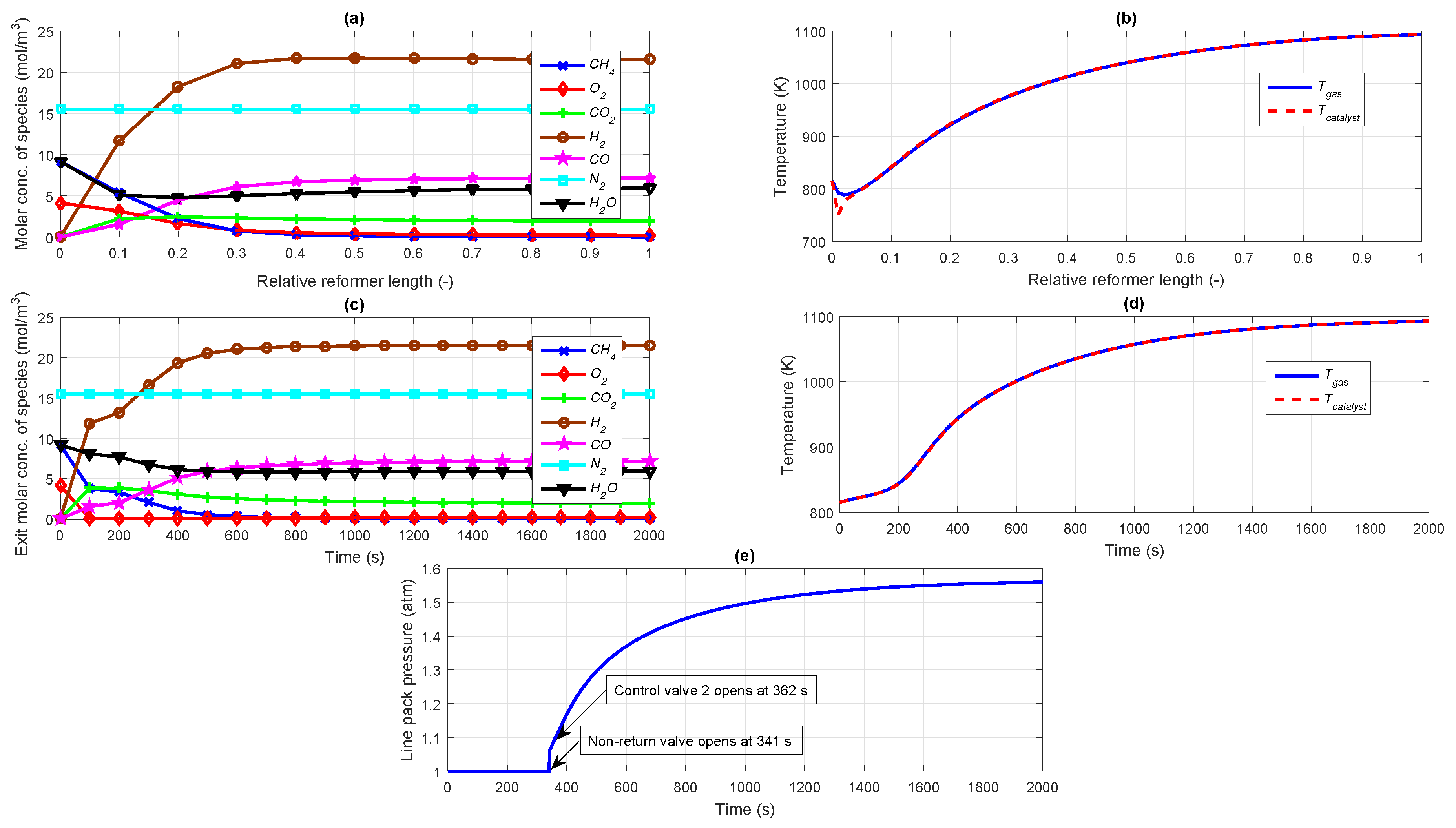
3.1. Case Study 1: Open Loop Simulation for Start-up of Integrated Reformer-Membrane-Fuel Cell System
Relative Gain Array (RGA) Analysis
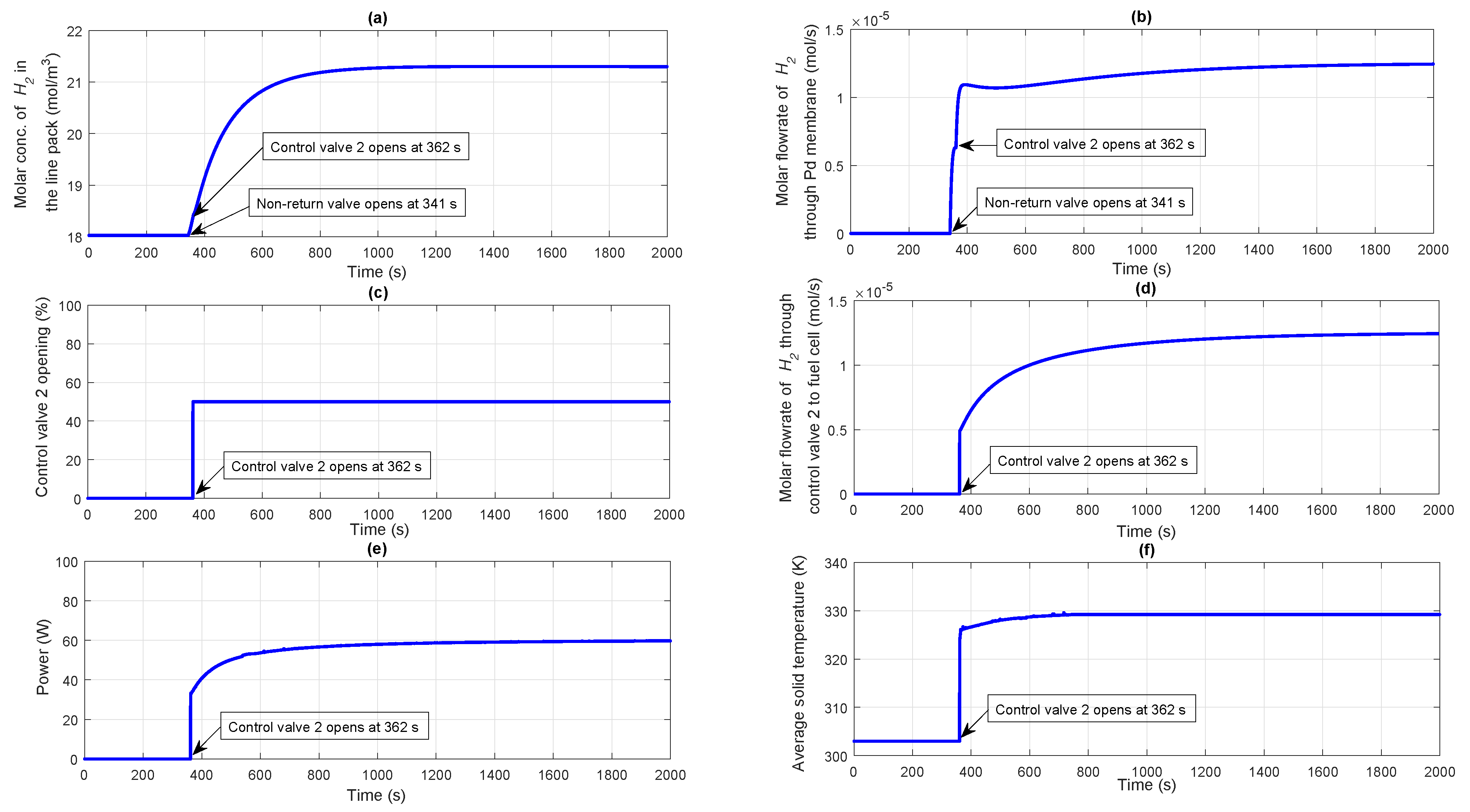
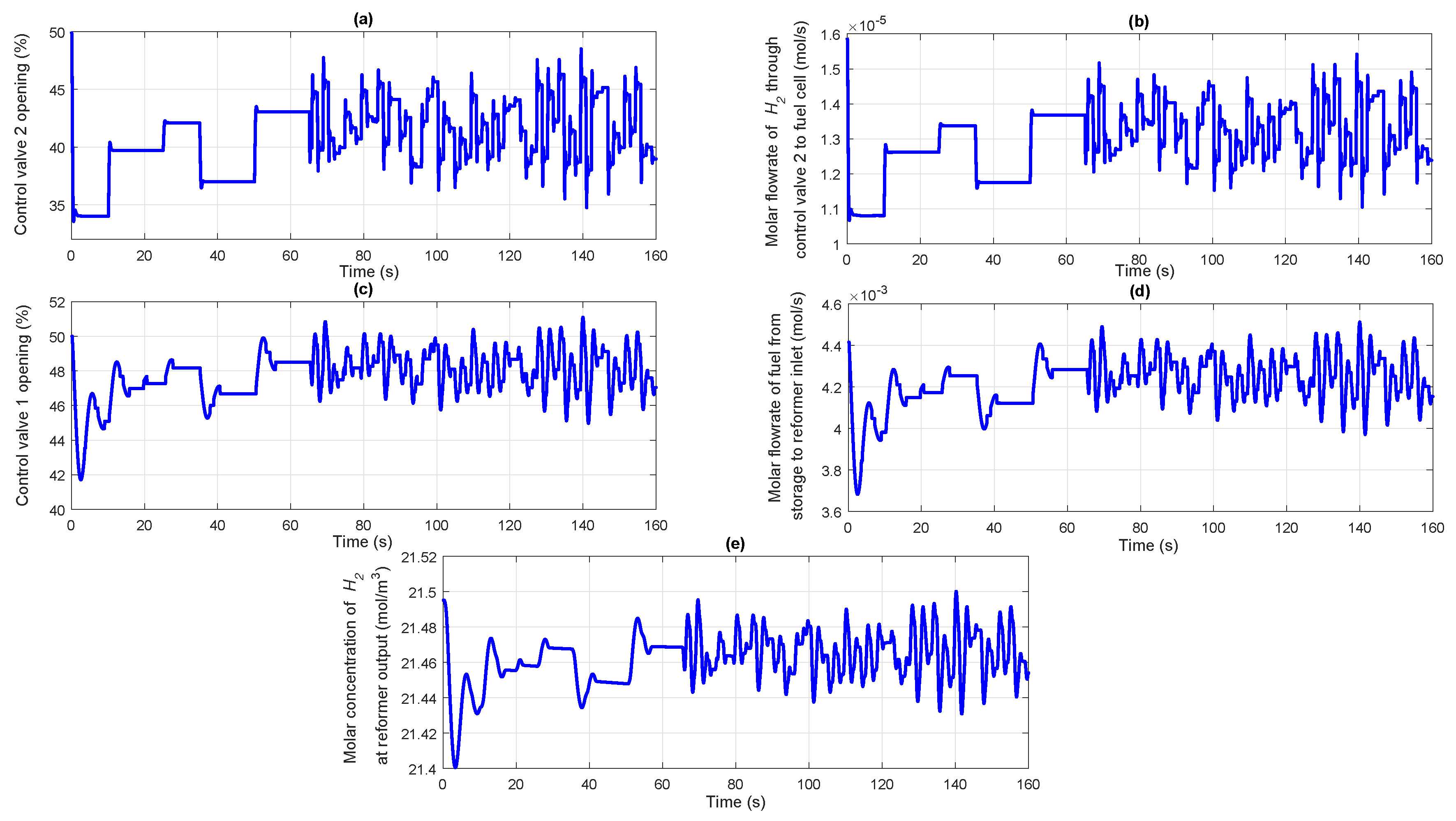
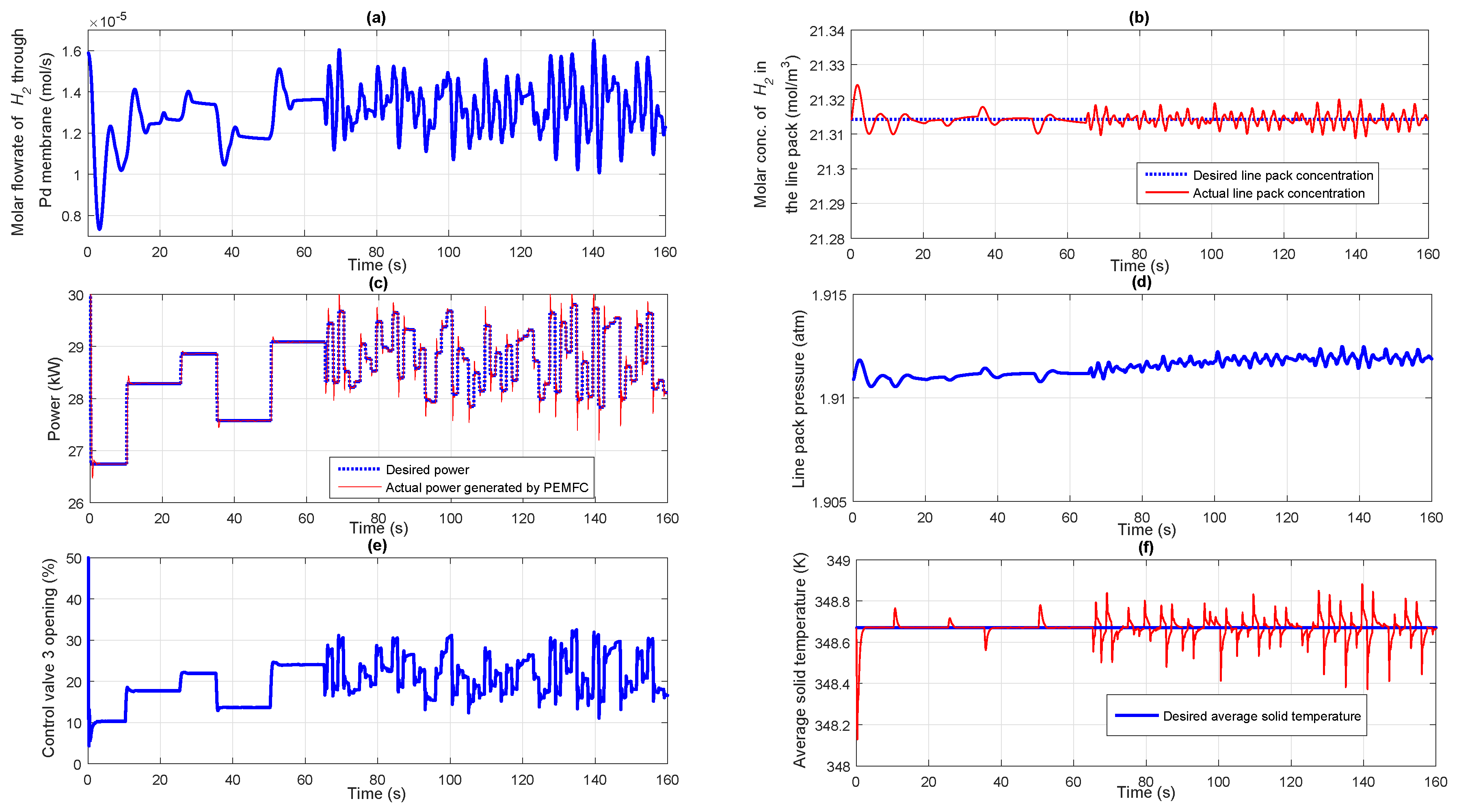
3.2. Case Study 2: Integrated System Delivering Target Power Demand
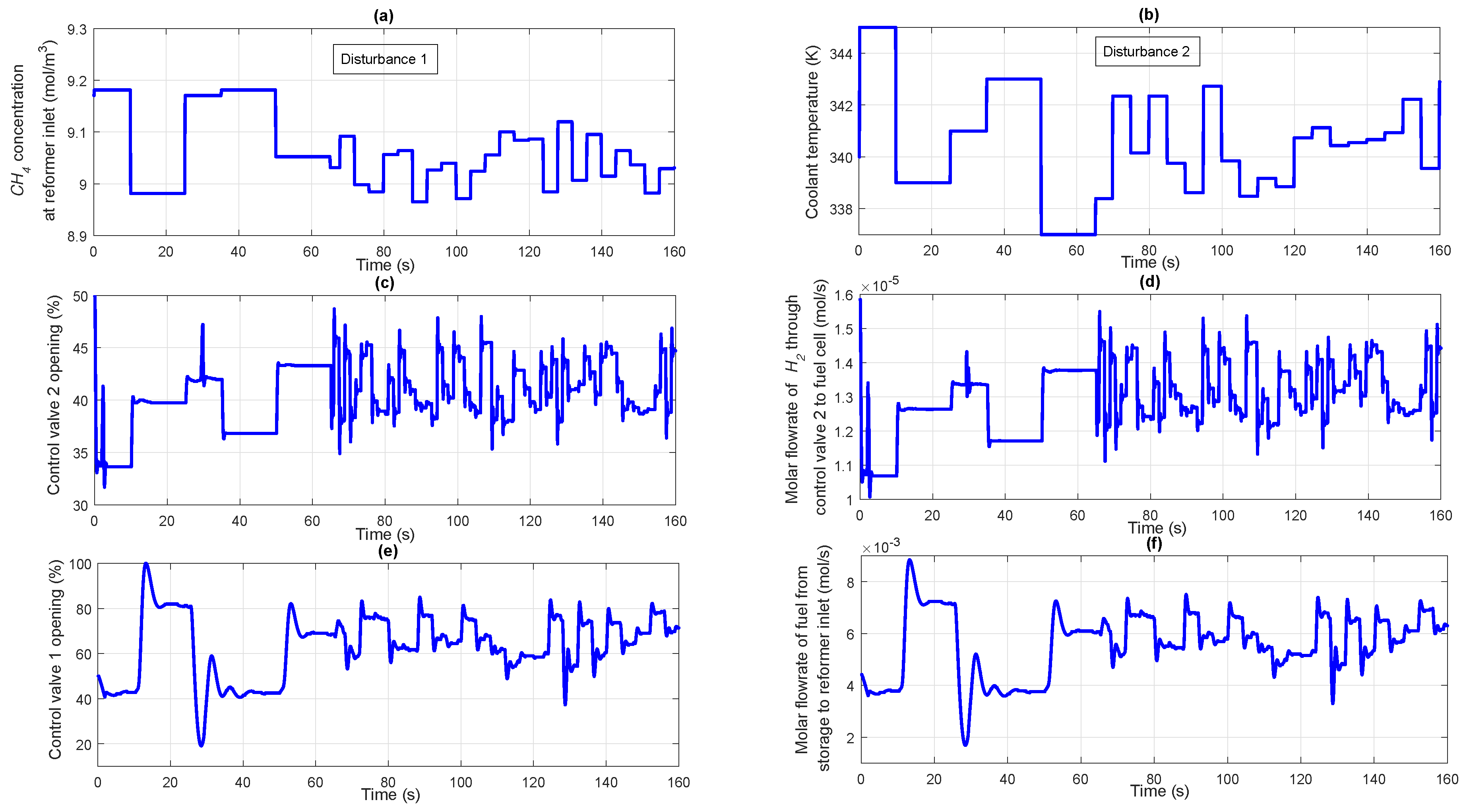
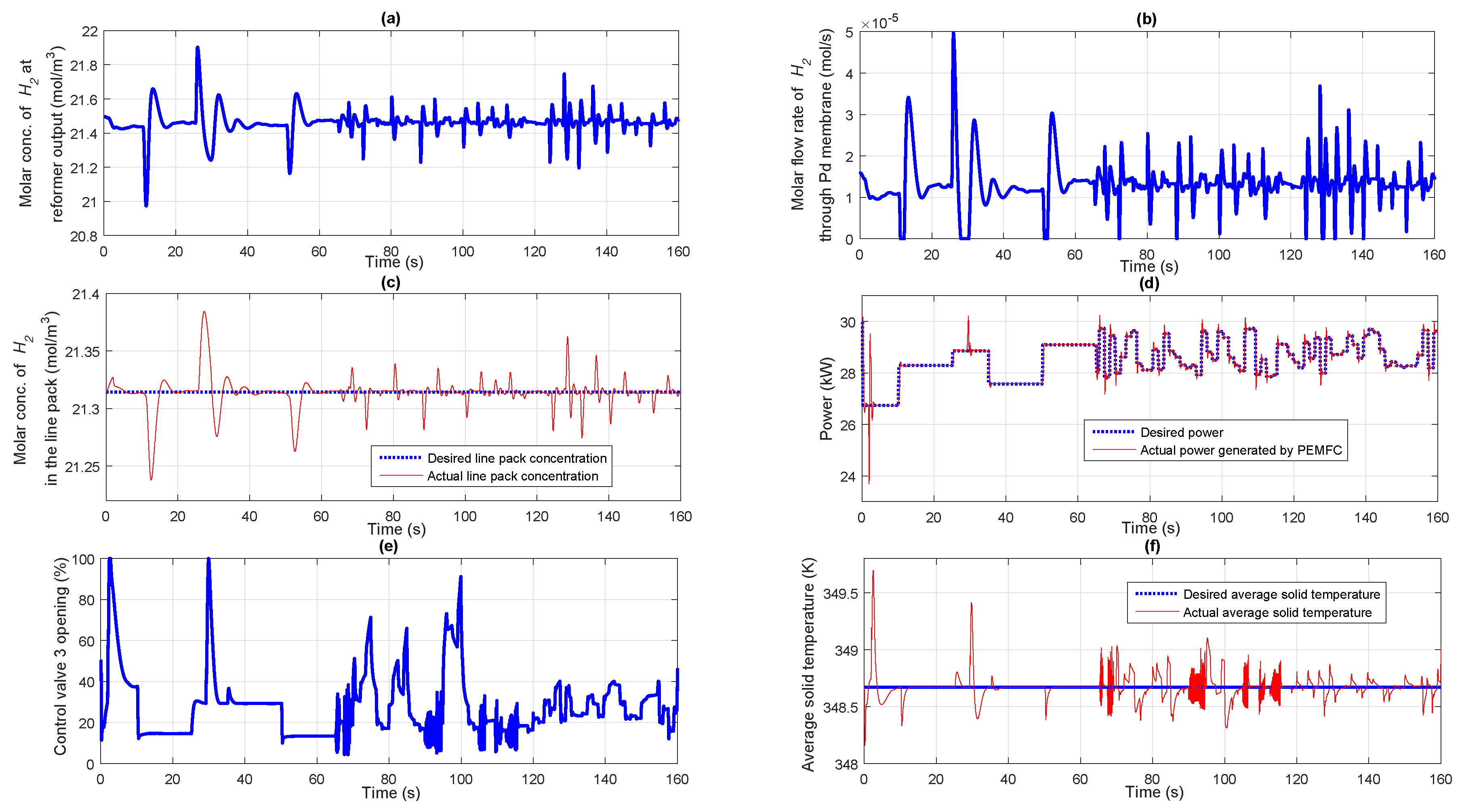
3.3. Case Study 3: Disturbance in both the Reformer Inlet Feed Concentration and Coolant Temperature
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| ratio of water molecules per proton (molecules proton) | |
| heat of reaction (kJ mol) | |
| packing bed porosity | |
| effectiveness factor of reaction j | |
| over potential (V) | |
| effective thermal conductivity (W(mK)) | |
| water viscosity (g cms) | |
| density of the catalyst bed (kg m) | |
| density of the catalyst pellet (kg m) | |
| density of the fluid (kg m) | |
| density of the solid (kg m) | |
| density of dry membrane of fuel cell (g cm) | |
| ionic conductivity of the fuel cell membrane (Ohm cm) | |
| Pd membrane poisoning caused by the adsorption of | |
| A | heat exchange area per unit length (cm) |
| area of the fuel flow pipe to the reformer inlet (m) | |
| activity of water in stream k | |
| external catalyst surface area per unit volume of catalyst bed (mm) | |
| Pd membrane surface area (m) | |
| molar concentration of species i in the gas phase (mol m) | |
| molar heat capacity (J(g mol K)) | |
| concentration of water in the membrane of fuel cell (mol cm) | |
| molar concentration of in the line pack (mol m) | |
| molar concentration of species i in the solid phase (mol m) | |
| specific heat of the catalyst bed (J (kg K)) | |
| specific heat of the fluid (J (kg K)) | |
| control valve 1 flow coefficient | |
| control valve 2 flow coefficient | |
| concentration of water at k interface of the membrane of fuel cell (mol cm) | |
| D | diffusion coefficient of water in membrane of fuel cell (cm s ) |
| d | fuel cell channel height (cm) |
| axial dispersion coefficient (m s ) | |
| e | membrane area per unit length (cm) |
| activation energy for permeability (J mol) | |
| F | Faraday’s constant (C mol) |
| f | cross-section of solid in fuel cell (cm) |
| opening of control valve 1 (%) | |
| opening of control valve 2 (%) | |
| piping geometry factor | |
| h | fuel cell channel width (cm) |
| gas to solid heat transfer coefficient (W ms) | |
| I | current density (A cm) |
| exchange current density (A cm) | |
| k | heat conduction coefficient (W (cmK)) |
| condensation rate constant (s) | |
| parameter corresponding to the viscous loss term (Pa s m) | |
| parameter corresponding to the kinetic loss term (Pa s m) | |
| gas to solid mass transfer coefficient of component i (m s) | |
| Pd membrane thickness (m) | |
| M | molar flow rate (mol s) |
| equivalent weight of dry membrane of fuel cell (g mol) | |
| n | pressure exponent |
| number of electrons taking part in charge reactions | |
| molar flux of species i (mol s cm) | |
| P | pressure (atm) |
| vapor pressure of water in channel | |
| permeability of Pd membrane (mol (msPa) | |
| permeability pre-exponential factor (mol (msPa) | |
| methane fuel storage pressure (atm) | |
| R | gas constant (J (mol K)) |
| rate of consumption or formation of species i (mol (kgs)) | |
| rate of reaction j (mol (kgs)) | |
| t | time (s) |
| reformer gas temperature (K) | |
| fuel cell membrane thickness (cm) | |
| fuel cell solid temperature (K) | |
| gas temperature at the exit of heat exchanger 1 (K) | |
| ambient temperature (K) | |
| methane fuel storage temperature (K) | |
| U | convective heat transfer coefficient (W cm K) |
| u | superficial gas flow velocity (m s) |
| V | volume of the line pack (m) |
| cell voltage (V) | |
| open circuit voltage (V) | |
| W | molecular weight (kg mol) |
| X | ratio of pressure drop to the absolute inlet pressure |
| x | direction along the fuel cell channel length (cm) |
| Y | expansion factor |
| Z | compressibility factor |
| z | axial dimension (m) |
Suffixes
| a | anode |
| c | cathode |
| g | gas |
| m | line pack |
| s | solid |
| sat | saturation |
| w | water |
Appendix A. Data for the Base Case
| Parameter | Values |
| (mol m) | 9.1705 |
| (mol m) | 4.1273 |
| (mol m) | 0.0001 |
| (mol m) | 9.1705 |
| (mol m) | 0.0001 |
| (mol m) | 0.0001 |
| (mol m) | 15.5287 |
| (K) | 815 |
| (K) | 815 |
| (mol m) | 0.001 |
| (mol s) | |
| (mol s) | |
| (mol s) | 0 |
| (mol s) | 0 |
| (mol s) | |
| (mol s) | |
| (K) | 353 |
| (K) | 353 |
| (K) | 340 |
| (K) | 342 |
Appendix B. Parameter Values Used for Simulation
| Parameter | Values |
| 0.4 | |
| z (m) | 0.2 |
| (m s) | |
| (m) | 1200 |
| (kg m) | 1870 |
| (kg m) | 1122 |
| (J kg K) | 850 |
| (kJ mol) | 206.2 |
| (kJ mol) | 164.9 |
| (kJ mol) | −41.1 |
| (kJ mol) | −802.7 |
| (K) | 0.07 |
| (K) | 0.06 |
| (K) | 0.7 |
| (K) | 0.05 |
| (K) | |
| 0.2 | |
| (m) | 0.0064 |
| (m) | 0.0001 |
| R (J mol K) | 8.314 |
| n | 0.67 |
| (mol m s Pa) | 0.4 |
| (J mol) | 8000 |
| x (cm) | 10 |
| h (cm) | 0.1 |
| d (cm) | 0.1 |
| F (C mol) | 96484.69 |
| (s) | 100 |
| (atm) | 1 |
| (atm) | 1 |
| (W cm K) | 0.025 |
| (cm) | 0.4 |
| (W cm K) | 0.025 |
| (cm) | 0.4 |
| (J g mol K) | 75.38 |
| (mol s) | |
| (g cm) | 2 |
| (J g mol K) | 1 |
| (W cm K) | 0.005 |
| e (cm) | 0.1 |
| (W cm K) | 0.025 |
| (K) | 350 |
| (V) | 1.1 |
| (cm) | 0.01275 |
| 2 | |
| (A cm) | 0.01 |
| 0.667 | |
| 0.67 | |
| Y | 1 |
| (kg mol) | 0.016 |
| Z | 1 |
| (atm) | 2 |
| V (m) | 0.00025 |
| 0.002 | |
| (kg mol) | 0.002 |
References
- Qi, A.; Peppley, B.; Karan, K. Integrated fuel processors for fuel cell application: A review. Fuel Process. Technol. 2007, 88, 3–22. [Google Scholar] [CrossRef]
- Halabi, M.; de Croon, M.; van der Schaaf, J.; Cobden, P.; Schouten, J. Modeling and analysis of autothermal reforming of methane to hydrogen in a fixed bed reformer. Chem. Eng. J. 2008, 137, 568–578. [Google Scholar] [CrossRef]
- Iwuchukwu, I.J.; Sheth, A. Mathematical modeling of high temperature and high-pressure dense membrane separation of hydrogen from gasification. Chem. Eng. Process. Process. Intensif. 2008, 47, 1292–1304. [Google Scholar] [CrossRef]
- Okazaki, J.; Ikeda, T.; Tanaka, D.A.P.; Sato, K.; Suzuki, T.M.; Mizukami, F. An investigation of thermal stability of thin palladium–silver alloy membranes for high temperature hydrogen separation. J. Membr. Sci. 2011, 366, 212–219. [Google Scholar] [CrossRef]
- Authayanun, S.; Mamlouk, M.; Scott, K.; Arpornwichanop, A. Comparison of high-temperature and low-temperature polymer electrolyte membrane fuel cell systems with glycerol reforming process for stationary applications. Appl. Energy 2013, 109, 192–201. [Google Scholar] [CrossRef]
- Basualdo, M.; Feroldi, D.; Outbib, R. PEM Fuel Cells with Bio-Ethanol Processor Systems: A Multidisciplinary Study of Modelling, Simulation, Fault Diagnosis and Advanced Control. In Green Energy and Technology; Springer: London, UK, 2011. [Google Scholar]
- Lorenzo, G.D.; Corigliano, O.; Faro, M.L.; Frontera, P.; Antonucci, P.; Zignani, S.; Trocino, S.; Mirandola, F.; Aricò, A.; Fragiacomo, P. Thermoelectric characterization of an intermediate temperature solid oxide fuel cell system directly fed by dry biogas. Energy Convers. Manag. 2016, 127, 90–102. [Google Scholar] [CrossRef]
- Kupecki, J.; Motylinski, K.; Milewski, J. Dynamic analysis of direct internal reforming in a sofc stack with electrolyte-supported cells using a quasi-1d model. Appl. Energy 2018, 227, 198–205. [Google Scholar] [CrossRef]
- Lorenzo, G.D.; Milewski, J.; Fragiacomo, P. Theoretical and experimental investigation of syngas-fueled molten carbonate fuel cell for assessment of its performance. Int. J. Hydrogen Energy 2017, 42, 28816–28828. [Google Scholar] [CrossRef]
- El-Sharkh, M.; Rahman, A.; Alam, M.; Byrne, P.; Sakla, A.; Thomas, T. A dynamic model for a stand-alone pem fuel cell power plant for residential applications. J. Power Sources 2004, 138, 199–204. [Google Scholar] [CrossRef]
- Ipsakis, D.; Voutetakis, S.; Seferlis, P.; Papadopoulou, S.; Stoukides, M. Modeling and analysis of an integrated power system based on methanol autothermal reforming. In Proceedings of the 17th Mediterranean Conference on Control and Automation, Thessaloniki, Greece, 24–26 June 2009; pp. 1421–1426. [Google Scholar]
- Stamps, A.T.; Gatzke, E.P. Dynamic modeling of a methanol reformer- pemfc stack system for analysis and design. J. Power Sources 2006, 161, 356–370. [Google Scholar] [CrossRef]
- Patcharavorachot, Y.; Wasuleewan, M.; Assabumrungrat, S.; Arpornwichanop, A. Analysis of hydrogen production from methane autothermal reformer with a dual catalyst-bed configuration. Theor. Found. Chem. Eng. 2012, 46, 658–665. [Google Scholar] [CrossRef]
- Ding, O.; Chan, S. Autothermal reforming of methane gas-modelling and experimental validation. Int. J. Hydrogen Energy 2008, 33, 633–643. [Google Scholar] [CrossRef]
- Vadlamudi, V.K.; Palanki, S. Modeling and analysis of miniaturized methanol reformer for fuel cell powered mobile applications. Int. J. Hydrogen Energy 2011, 36, 3364–3370. [Google Scholar] [CrossRef]
- Pinacci, P.; Drago, F. Influence of the support on permeation of palladium composite membranes in presence of sweep gas. Catal. Today 2012, 193, 186–193. [Google Scholar] [CrossRef]
- Doong, S.; Yang, R. Hydrogen purification by the multibed pressure swing adsorption process. React. Polym. Ion Exch. Sorbents 1987, 6, 7–13. [Google Scholar] [CrossRef]
- Canevese, S.; Marco, A.D.; Murrai, D.; Prandoni, V. Modelling and control of a psa reactor for hydrogen purification. IFAC Proceed. Vol. 2007, 40, 99–104. [Google Scholar] [CrossRef]
- Bhargav, A. Model Development and Validation of Palladium-Based Membranes for Hydrogen Separation in Pem Fuel Cell Systems. Ph.D. Thesis, University of Maryland, College Park, MD, USA, 2010. [Google Scholar]
- Golbert, J.; Lewin, D.R. Model-based control of fuel cells: (1) Regulatory control. J. Power Sources 2004, 135, 135–151. [Google Scholar] [CrossRef]
- Pukrushpan, J.T.; Stefanopoulou, A.G.; Peng, H. Modeling and control for pem fuel cell stack system. In Proceedings of the 2002 American Control Conference (IEEE Cat. No.CH37301), Anchorage, AK, USA, 8–10 May 2002; Volume 4, pp. 3117–3122. [Google Scholar]
- Nguyen, T.; White, R. A water and heat management model for proton-exchange-membrane fuel cells. J. Electrochem. Soc. 1993, 140, 2178–2186. [Google Scholar] [CrossRef]
- Methekar, R.; Prasad, V.; Gudi, R. Dynamic analysis and linear control strategies for proton exchange membrane fuel cell using a distributed parameter model. J. Power Sources 2007, 165, 152–170. [Google Scholar] [CrossRef]
- Perry, R.H.; Green, D.W.; Maloney, J.O. Perry’s Chemical Engineers Handbook, 7th ed.; The McGraw-Hill Companies Inc.: New York, NY, USA, 1999. [Google Scholar]
- Chatrattanawet, N.; Skogestad, S.; Arpornwichanop, A. Control structure design and dynamic modeling for a solid oxide fuel cell with direct internal reforming of methane. Chem. Eng. Res. Des. 2015, 98, 202–211. [Google Scholar] [CrossRef]
- Sarkar, A.; Banerjee, R. Net energy analysis of hydrogen storage options. Int. J. Hydrog Energy 2005, 30, 867–877. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electrode | Reactions |
|---|---|
| Anode | |
| Cathode | |
| Overall |
| Loop | Controller | Ratio | |||
|---|---|---|---|---|---|
| Pressure controller | PID | 0.3 | 0.0001 | 0.4 | - |
| Power controller | P | 0.1 | - | - | - |
| Temperature controller | PID | −0.1 | −0.0001 | −0.05 | |
| Air to ratio controller | Ratio | - | - | - | 5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
P. S., P.; Gudi, R.D.; Bhartiya, S. Dynamic Modeling and Control of an Integrated Reformer-Membrane-Fuel Cell System. Processes 2018, 6, 169. https://doi.org/10.3390/pr6090169
P. S. P, Gudi RD, Bhartiya S. Dynamic Modeling and Control of an Integrated Reformer-Membrane-Fuel Cell System. Processes. 2018; 6(9):169. https://doi.org/10.3390/pr6090169
Chicago/Turabian StyleP. S., Pravin, Ravindra D. Gudi, and Sharad Bhartiya. 2018. "Dynamic Modeling and Control of an Integrated Reformer-Membrane-Fuel Cell System" Processes 6, no. 9: 169. https://doi.org/10.3390/pr6090169
APA StyleP. S., P., Gudi, R. D., & Bhartiya, S. (2018). Dynamic Modeling and Control of an Integrated Reformer-Membrane-Fuel Cell System. Processes, 6(9), 169. https://doi.org/10.3390/pr6090169