
Fishing Vessel Trawl Winch Tension Control: A BP Neural Network PID Feedforward Control Method Based on NARX Neural Network Prediction


Abstract
1. Introduction
2. Neural Network
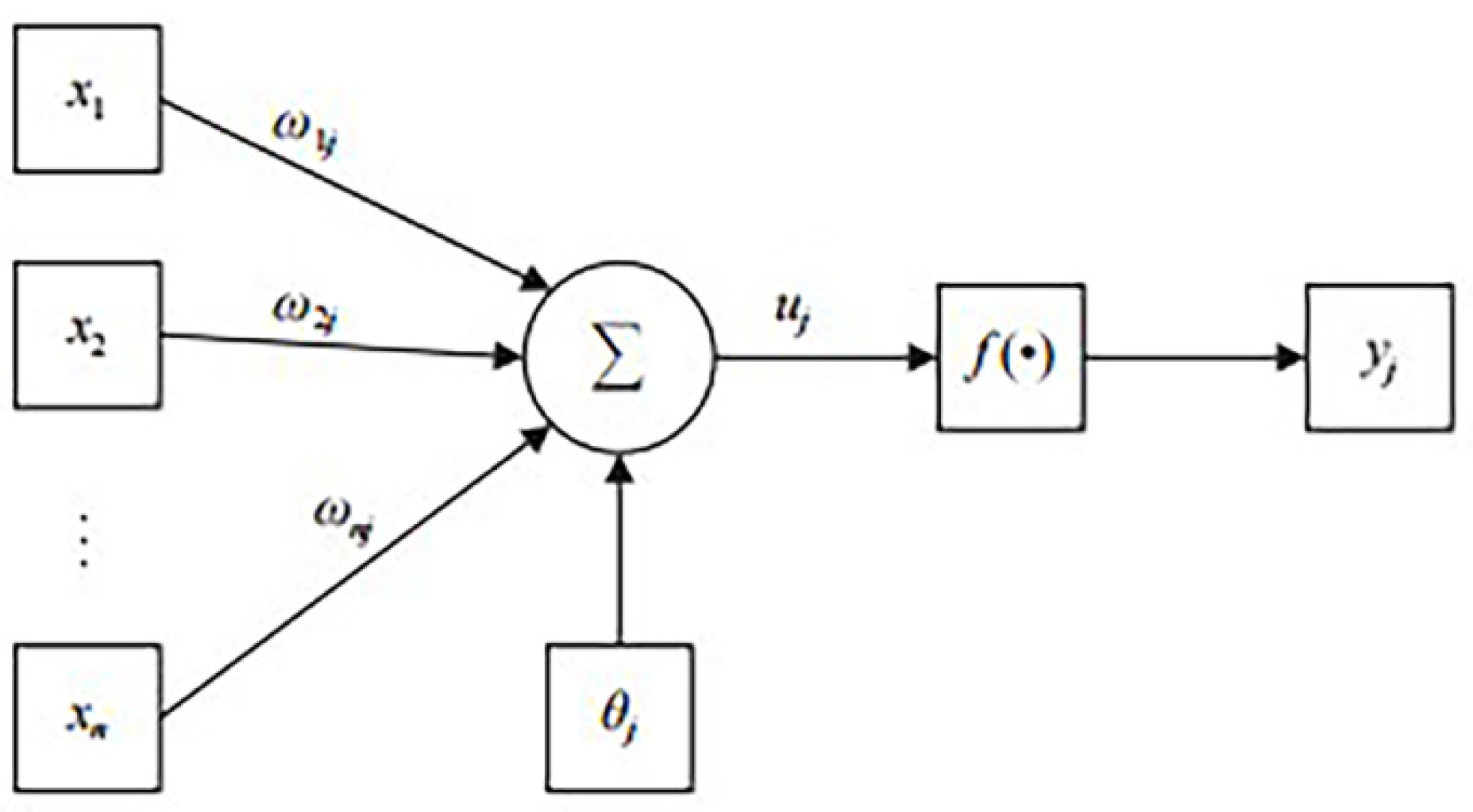
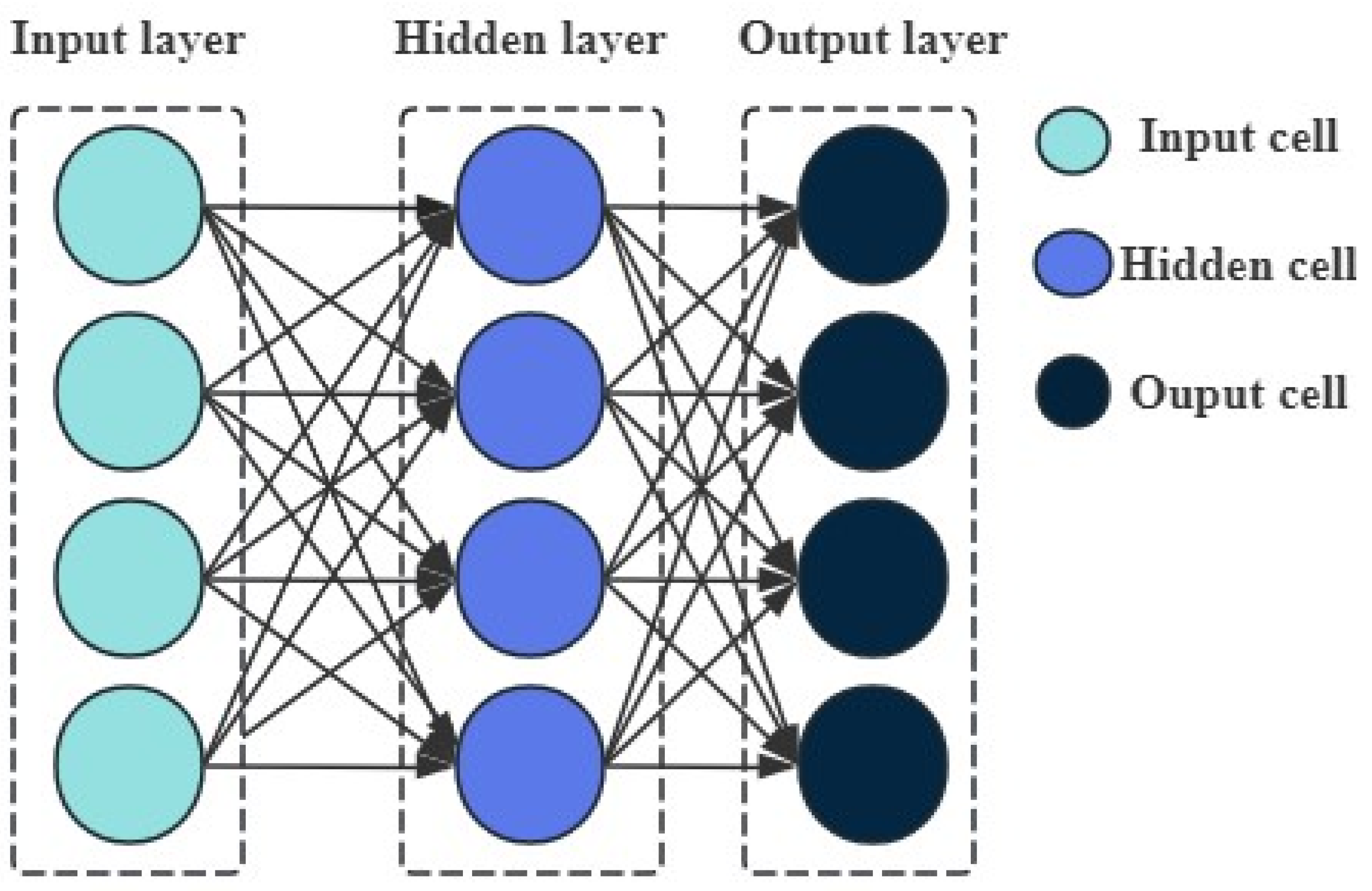
2.1. Artificial Neural Networks
2.2. NARX Neural Network
2.3. NARX Tension Compensation Value Prediction Model
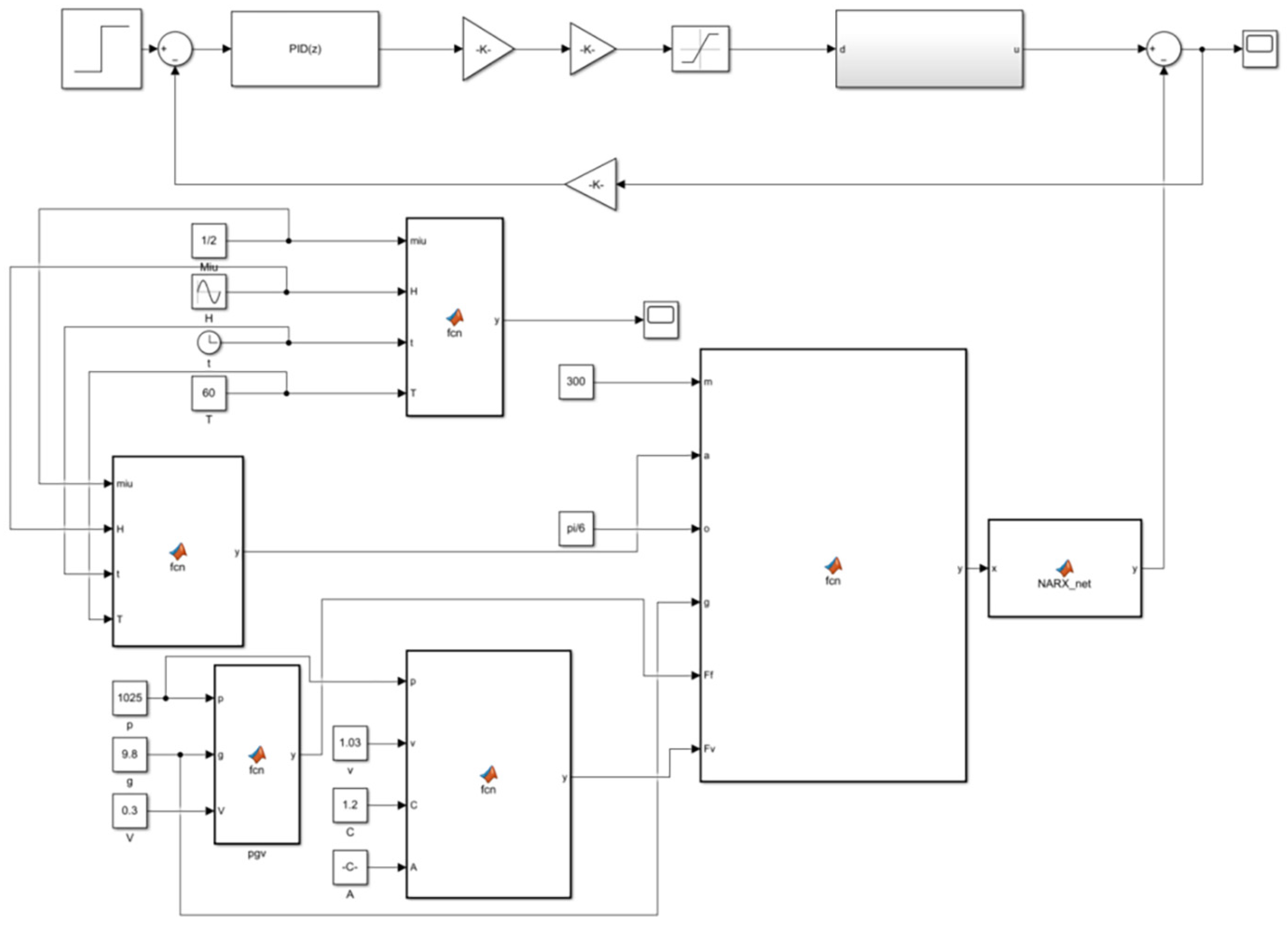
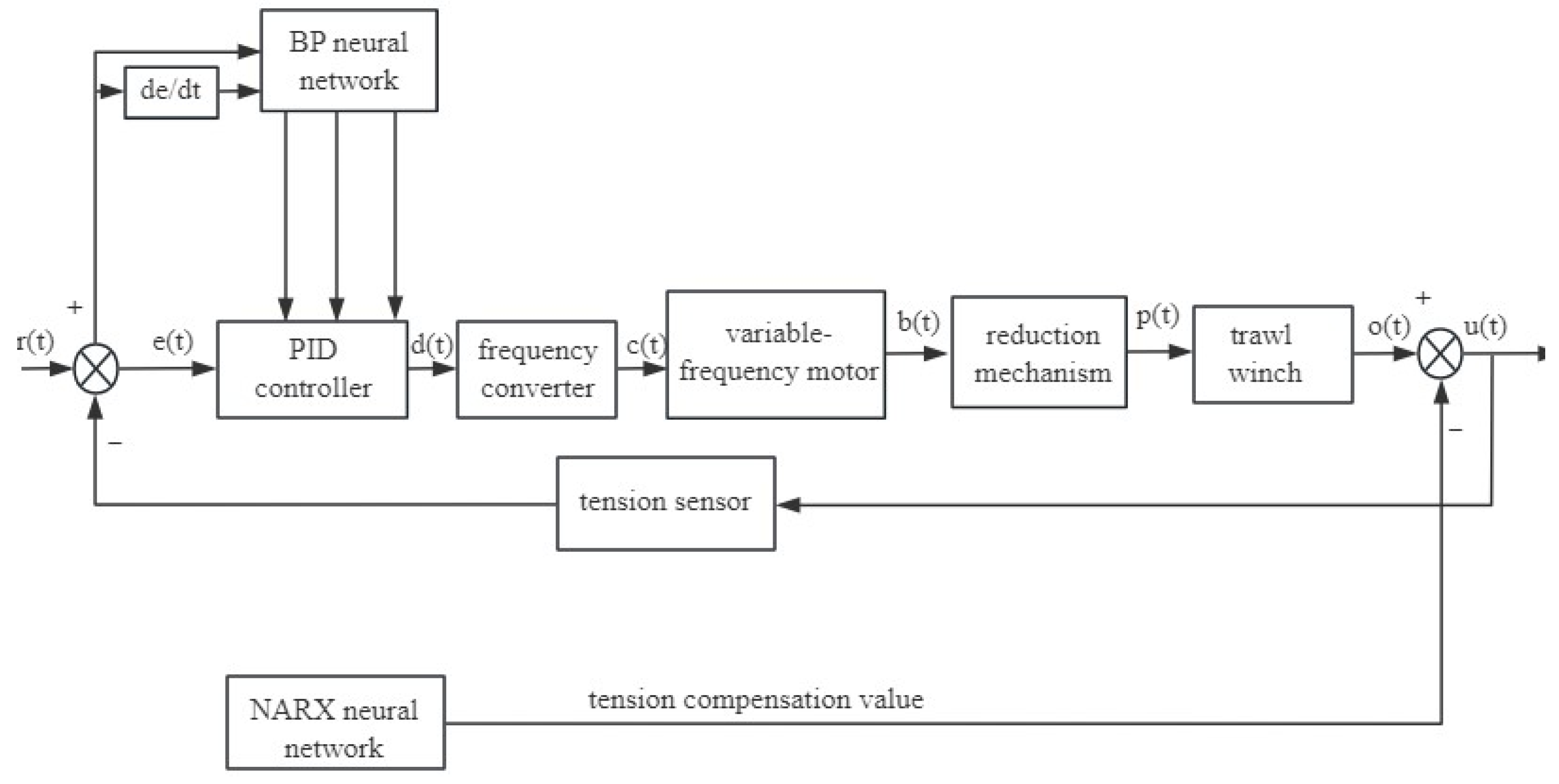
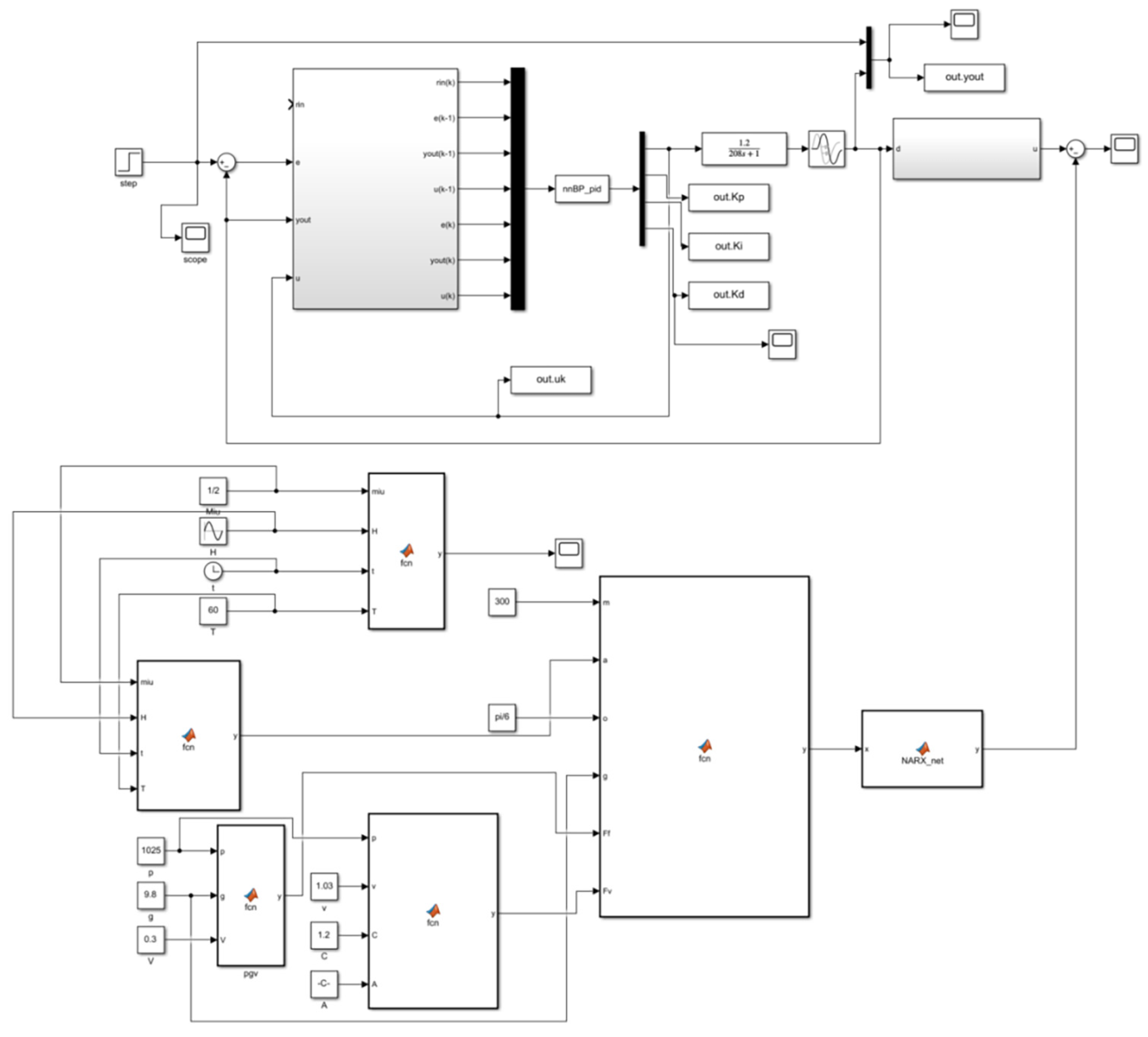
3. NARX-Based Trawl Winch Tension Control System Design
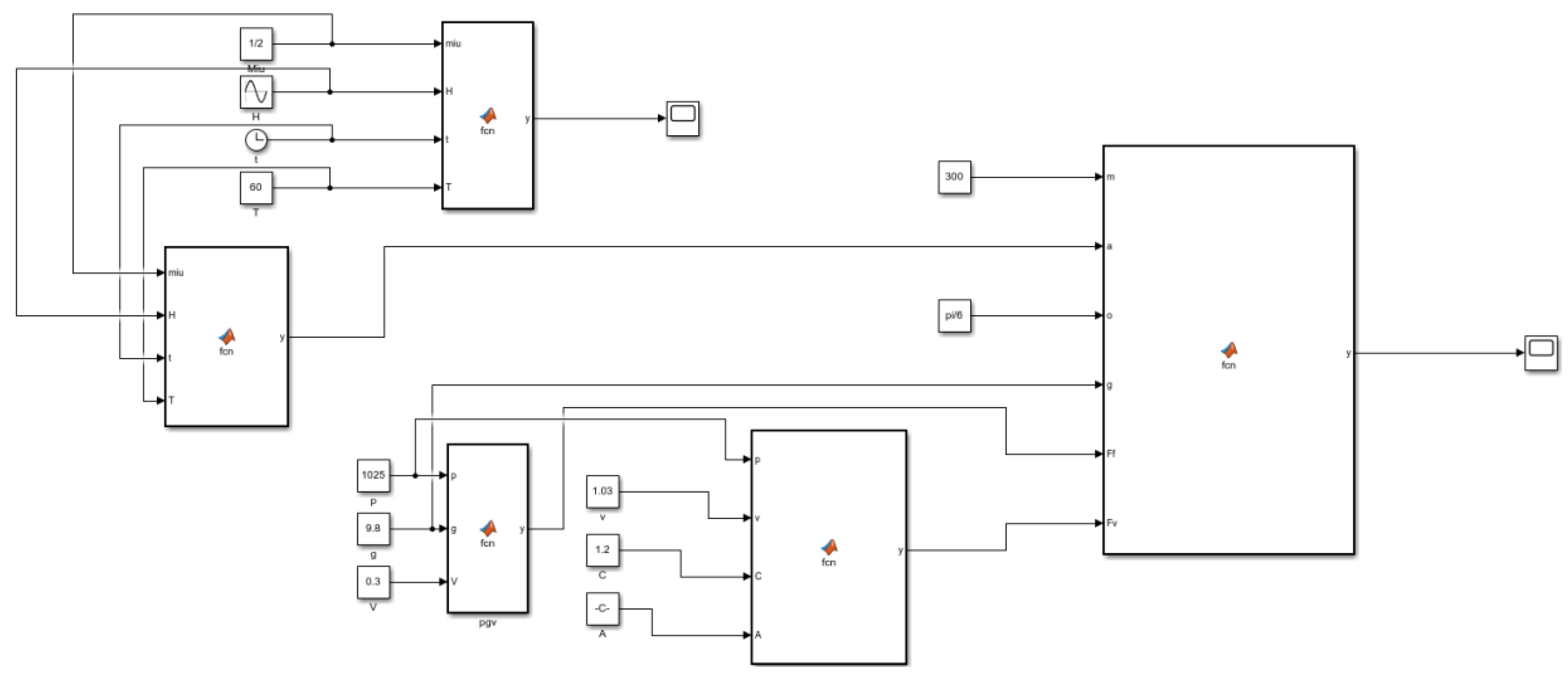
3.1. Mathematical Modeling of Trawl Winch
3.2. Conventional PID Controller Design
3.3. RBF Neural Network-Based PID Controller Design
3.4. BP Neural Network-Based PID Controller Design
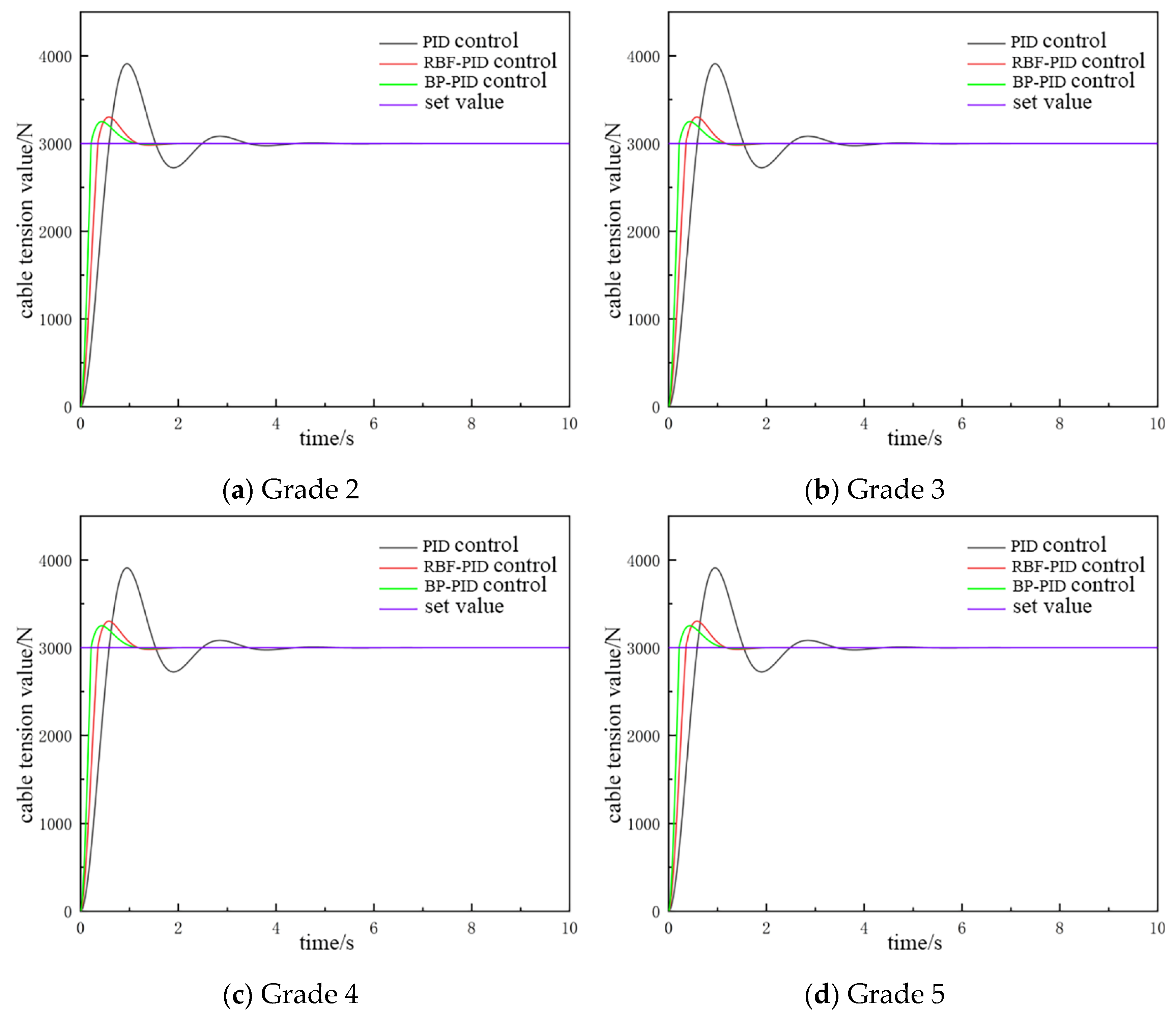
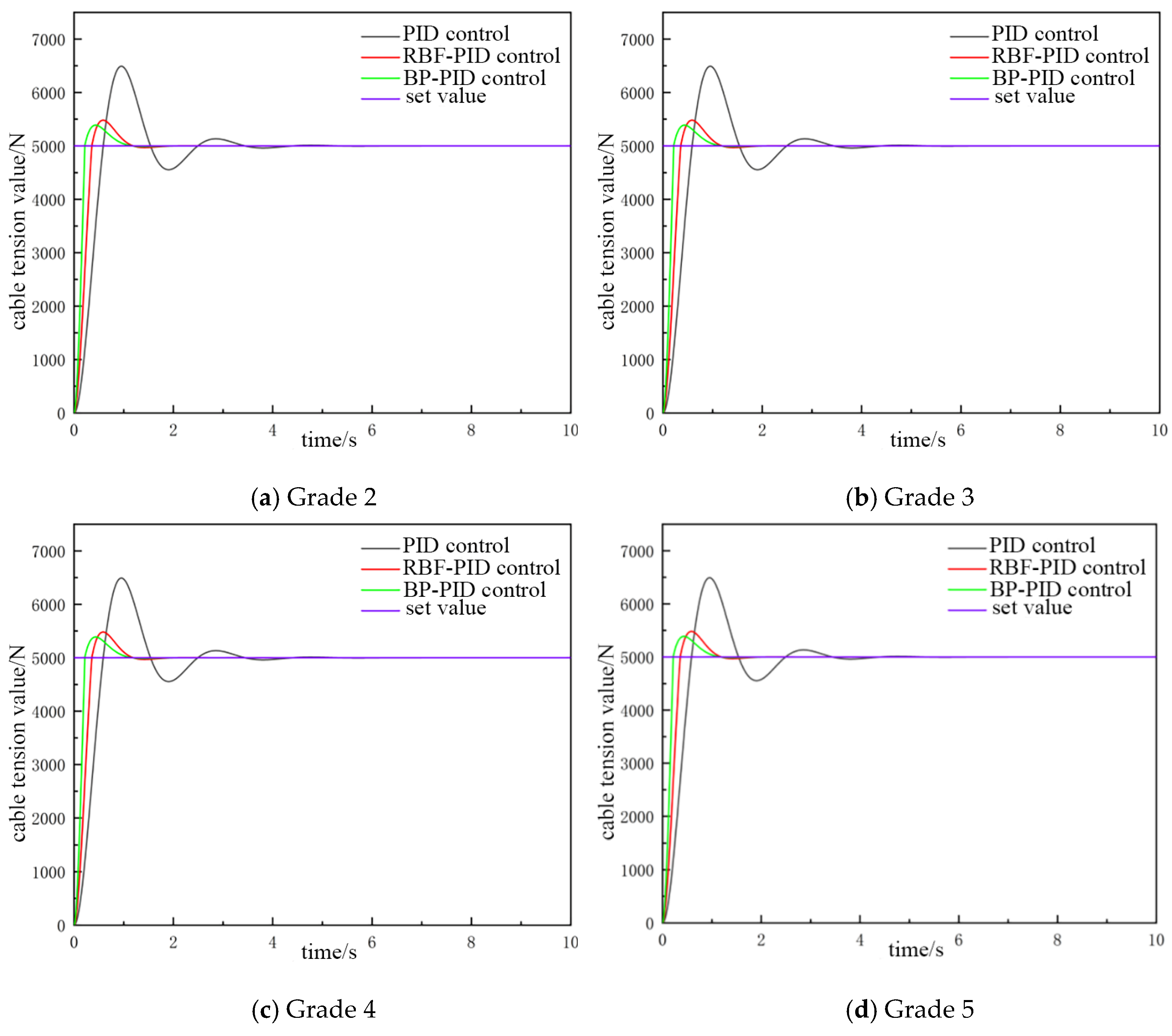
3.5. Analysis of Simulation Results
4. Results
5. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Z.; Tang, H.; Xu, L.; Zhang, J. A review on fishing gear in China: Selectivity and application. Aquac. Fish. 2022, 7, 345–358. [Google Scholar] [CrossRef]
- Wang, A.; Wei, Y.; Han, H.; Guan, L.; Zhang, X.; Xu, X. Ocean wave active compensation analysis of inverse kinematics for hybrid boarding system based on fuzzy algorithm. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018. [Google Scholar]
- Li, Y.; Li, R.; Yang, J.; Yu, X.; Xu, J. Review of recent advances in the drive method of hydraulic control valve. Processes 2023, 11, 2537. [Google Scholar] [CrossRef]
- Sciatti, F.; Tamburrano, P.; Distaso, E.; Amirante, R. Digital hydraulic valves: Advancements in research. Heliyon 2024, 10, e27264. [Google Scholar] [CrossRef] [PubMed]
- Hao, H.; Yan, H.; Zhang, Q.; Li, H. Pressure Control of Multi-Mode Variable Structure Electro–Hydraulic Load Simulation System. Sensors 2024, 24, 7400. [Google Scholar] [CrossRef]
- Wei, H.; Zhu, N.; Sun, Z.; Tan, S.; Tian, R. Research on the intelligent control strategy of pressurizer pressure in PWRs based on a fuzzy neural network PID controller. Nucl. Eng. Des. 2025, 433, 113875. [Google Scholar] [CrossRef]
- Phu, N.D.; Hung, N.N.; Ahmadian, A.; Senu, N. A new fuzzy PID control system based on fuzzy PID controller and fuzzy control process. Int. J. Fuzzy Syst. 2020, 22, 2163–2187. [Google Scholar] [CrossRef]
- Borase, R.P.; Maghade, D.K.; Sondkar, S.Y.; Pawar, S.N. A review of PID control, tuning methods and applications. Int. J. Dyn. Control 2021, 9, 818–827. [Google Scholar] [CrossRef]
- Xu, X.; Li, B. PDE-based observation and predictor-based control for linear systems with distributed infinite input and output delays. Automatica 2024, 170, 111845. [Google Scholar] [CrossRef]
- Li, Z.; Hu, J.; Leng, B.; Xiong, L.; Fu, Z. An integrated of decision making and motion planning framework for enhanced oscillation-free capability. IEEE Trans. Intell. Transp. Syst. 2023, 25, 5718–5732. [Google Scholar] [CrossRef]
- Xiong, J.-J.; Chen, Y. RBFNN-Based Parameter Adaptive Sliding Mode Control for an Uncertain TQUAV With Time-Varying Mass. Int. J. Robust Nonlinear Control 2025, 35, 4658–4668. [Google Scholar] [CrossRef]
- Guzman, S.M.; Paz, J.O.; Tagert, M.L.M. The use of NARX neural networks to forecast daily groundwater levels. Water Resour. Manag. 2017, 31, 1591–1603. [Google Scholar] [CrossRef]
- Ezzeldin, R.; Hatata, A. Application of NARX neural network model for discharge prediction through lateral orifices. Alex. Eng. J. 2018, 57, 2991–2998. [Google Scholar] [CrossRef]
- Beintema, G.I.; Schoukens, M.; Tóth, R. Deep subspace encoders for nonlinear system identification. Automatica 2023, 156, 111210. [Google Scholar] [CrossRef]
- Mohammadi, S.; Karimi, S.; Mohammadi, A.A.; Moghanlo, S.; Alavinejad, M.; Saleh, H.N.; Mohammadi, H.; Hashemi, M.N.; Kisi, O. Prediction of climate change on surface water using NARX neural network model: A case study on Ghezel Ozan River, Northwest, Iran. Desalination Water Treat. 2023, 304, 112–128. [Google Scholar] [CrossRef]
- Song, H.; Shan, X.; Zhang, L.; Wang, G.; Fan, J. Research on identification and active vibration control of cantilever structure based on NARX neural network. Mech. Syst. Signal Process. 2022, 171, 108872. [Google Scholar] [CrossRef]
- Lou, M.Y.; Wang, X.Y.; Chen, R.; Ge, T. A real-time prediction method for ship heave motion using NARX neural network. Chin. J. Ship Res. 2020, 15, 48–55, 67. [Google Scholar]
- Zhang, Z.; Zhang, Z.; Zhao, S.; Hong, Z.; Huang, S.; Li, Q. Full Feedback Dynamic Neural Network with Exogenous Inputs for Dynamic Data-Driven Modeling in Nonlinear Dynamic Power Systems. IEEJ Trans. Electr. Electron. Eng. 2023, 18, 876–890. [Google Scholar] [CrossRef]
- Wu, W.; Li, L.; Yin, J.; Lyu, W.; Zhang, W. A modular tide level prediction method based on a NARX neural network. IEEE Access 2021, 9, 147416–147429. [Google Scholar] [CrossRef]
- Jiang, Y.; Yang, N.; Yao, Q.; Wu, Z.; Jin, W. Real-time moisture control in sintering process using offline–online NARX neural networks. Neurocomputing 2020, 396, 209–215. [Google Scholar] [CrossRef]
- Khan, N.A.; Sulaiman, M.; Tavera Romero, C.A.; Alarfaj, F.K. Theoretical analysis on absorption of carbon dioxide (CO2) into solutions of phenyl glycidyl ether (PGE) using nonlinear autoregressive exogenous neural networks. Molecules 2021, 26, 6041. [Google Scholar] [CrossRef]
- Nefraoui, A.; Kandoussi, K.; Louzazni, M.; Boutahar, A.; Elotmani, R.; Daya, A. Optimal battery state of charge parameter estimation and forecasting using non-linear autoregressive exogenous. Mater. Sci. Energy Technol. 2023, 6, 522–532. [Google Scholar] [CrossRef]
- Hu, X. Hydrodynamics in the Deployment of Major Components of the 1000-Metre Sea Trial System for Deep-Sea Mining. Ph.D. Thesis, Central South University, Changsha, China, 2011. [Google Scholar]
- MATLAB, version: 9.13.0 (R2022b); The MathWorks Inc.: Natick, MA, USA, 2022.
- Preetha, P.; Mallika, R. Normalization and deep learning based attention deficit hyperactivity disorder classification. J. Intell. Fuzzy Syst. 2021, 40, 7613–7621. [Google Scholar] [CrossRef]
- Zhao, Y.-M.; Li, C.; Deng, Y.-P. Modeling and Simulation Analysis on the Control System of Marine Shipborne Electric Driven Winch. Comput. Simul. 2016, 11, 244–249. [Google Scholar]
- Aboelhassan, A.; Abdelgeliel, M.; Zakzouk, E.E.; Galea, M. Design and Implementation of model predictive control based PID controller for industrial applications. Energies 2020, 13, 6594. [Google Scholar] [CrossRef]
- Martin, I.A.; Irani, R.A. A generalized approach to anti-sway control for shipboard cranes. Mech. Syst. Signal Process. 2021, 148, 107168. [Google Scholar] [CrossRef]
- Hong, Y.; Kang, J.; Fu, C. Tunnel fire smoke control based on the PID method: A numerical study. Tunn. Undergr. Space Technol. 2022, 124, 104450. [Google Scholar] [CrossRef]
- Konstantopoulos, G.C.; Baldivieso-Monasterios, P.R. State-limiting PID controller for a class of nonlinear systems with constant uncer-tainties. Int. J. Robust Nonlinear Control 2020, 30, 1770–1787. [Google Scholar] [CrossRef]
- Feng, H.; Song, Q.; Ma, S.; Ma, W.; Yin, C.; Cao, D.; Yu, H. A new adaptive sliding mode controller based on the RBF neural network for an electro-hydraulic servo system. ISA Trans. 2022, 129, 472–484. [Google Scholar] [CrossRef]
- Wang, Y.; Shi, Y.; Cai, M.; Xu, W. Predictive control of air-fuel ratio in aircraft engine on fuel-powered unmanned aerial vehicle using fuzzy-RBF neural network. J. Frankl. Inst. 2020, 357, 8342–8363. [Google Scholar] [CrossRef]
- Jiang, Q.; Zhu, L.; Shu, C.; Sekar, V. An efficient multilayer RBF neural network and its application to regression problems. Neural Comput. Appl. 2022, 34, 4133–4150. [Google Scholar] [CrossRef]
- Zhang, R.; Wu, S.; Lu, R.; Gao, F. Predictive control optimization based PID control for temperature in an industrial surfactant reactor. Chemom. Intell. Lab. Syst. 2014, 135, 48–62. [Google Scholar] [CrossRef]
- Dogru, O.; Velswamy, K.; Ibrahim, F.; Wu, Y.; Sundaramoorthy, A.S.; Huang, B.; Xu, S.; Nixon, M.; Bell, N. Reinforcement learning approach to autonomous PID tuning. Comput. Chem. Eng. 2022, 161, 107760. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, Q.; Wang, Z.; Xiong, J. The investigation into the failure criteria of concrete based on the BP neural network. Eng. Fract. Mech. 2022, 275, 108835. [Google Scholar] [CrossRef]
- Ren, H.; Hou, B.; Zhou, G.; Shen, L.; Wei, C.; Li, Q. Variable pitch active disturbance rejection control of wind turbines based on BP neural network PID. IEEE Access 2020, 8, 71782–71797. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Y.; Yang, F.; Li, R.; Han, P.; Xue, D. Research on autonomous walking performance and electromechanical characteristics of mining double-track chassis. PLoS ONE 2024, 19, e0312096. [Google Scholar] [CrossRef]
- Li, H.; Zhang, Z.-Y. The application of immune genetic algorithm in main steam temperature of PID control of BP network. Phys. Procedia 2012, 24, 80–86. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sea Conditions | Wind Velocity/(m∙s−1) | Wave Height/m | Average Periodicity (s) | Major Cycle Range (s) |
|---|---|---|---|---|
| Grade 1 | 5 | 0.1534 | 1.3 | 0.4~2.8 |
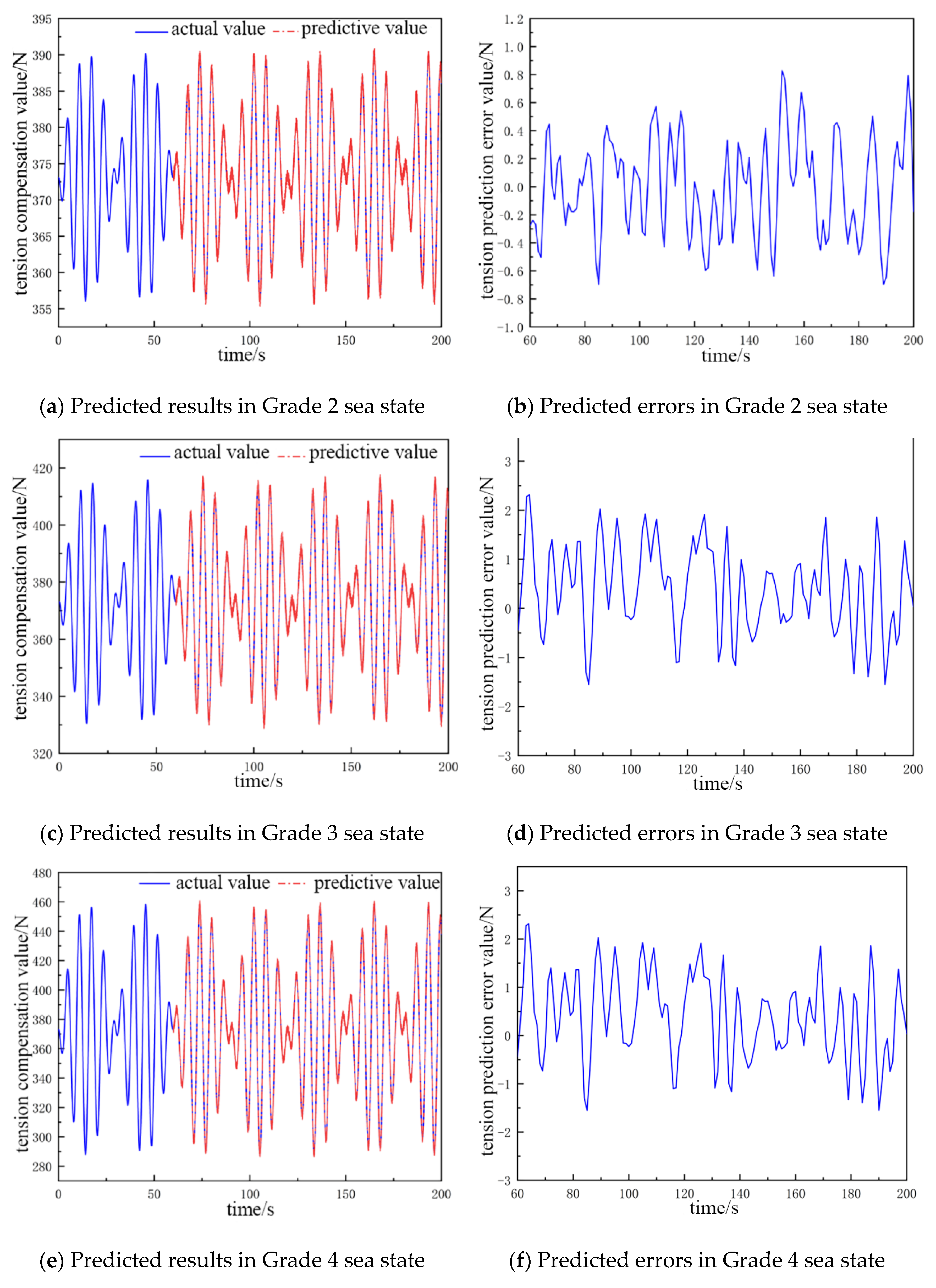
| Grade 2 | 8.5 | 0.3962 | 2.6 | 0.8~5 |
| Grade 3 | 13.5 | 1.0058 | 3.6 | 1.4~7.6 |
| Grade 4 | 19 | 2.0116 | 5.1 | 2.8~10.6 |
| Grade 5 | 24.5 | 3.3223 | 6.6 | 3.8~13.6 |
| Sea Conditions | Network Structure | Maximum Error/N | Average Error/N | RMSE/N | Accuracy % |
|---|---|---|---|---|---|
| Grade 2 | 12-5-1 | 0.85 | 0.45 | 0.27 × 10−7 | 95.3 |
| Grade 3 | 13-5-1 | 1.9 | 0.92 | 1.13 × 10−7 | 96.1 |
| Grade 4 | 15-6-1 | 2.4 | 1.29 | 2.24 × 10−7 | 97.6 |
| Grade 5 | 16-6-1 | 2.5 | 1.35 | 2.44 × 10−7 | 98.3 |
| Sea Conditions | Network Structure | Maximum Error/N | Average Error/N | RMSE/N | Accuracy/% |
|---|---|---|---|---|---|
| Grade 2 | 15-6-1 | 0.9 | 0.47 | 0.30 × 10−7 | 97.1 |
| Grade 3 | 15-7-1 | 2.2 | 0.48 | 0.33 × 10−7 | 97.5 |
| Grade 4 | 16-7-1 | 2.2 | 1.67 | 3.69 × 10−7 | 98.2 |
| Grade 5 | 17-7-1 | 3.4 | 2.01 | 5.27 × 10−7 | 98.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Wang, Y.; Xu, M. Fishing Vessel Trawl Winch Tension Control: A BP Neural Network PID Feedforward Control Method Based on NARX Neural Network Prediction. Processes 2025, 13, 2001. https://doi.org/10.3390/pr13072001
Liu Q, Wang Y, Xu M. Fishing Vessel Trawl Winch Tension Control: A BP Neural Network PID Feedforward Control Method Based on NARX Neural Network Prediction. Processes. 2025; 13(7):2001. https://doi.org/10.3390/pr13072001
Chicago/Turabian StyleLiu, Quanliang, Ya Wang, and Mingwei Xu. 2025. "Fishing Vessel Trawl Winch Tension Control: A BP Neural Network PID Feedforward Control Method Based on NARX Neural Network Prediction" Processes 13, no. 7: 2001. https://doi.org/10.3390/pr13072001
APA StyleLiu, Q., Wang, Y., & Xu, M. (2025). Fishing Vessel Trawl Winch Tension Control: A BP Neural Network PID Feedforward Control Method Based on NARX Neural Network Prediction. Processes, 13(7), 2001. https://doi.org/10.3390/pr13072001