

A Sequential Hybrid Optimization Algorithm (SHOA) to Solve the Hybrid Flow Shop Scheduling Problems to Minimize Carbon Footprint


Abstract
1. Introduction
- To develop a sequential hybrid optimization algorithm (SHOA) using the pigeon-inspired optimization algorithm (PIOA) and firefly algorithm (FA) to minimize the carbon footprint in an HFS environment.
- To solve the real industrial scheduling problem of a collaborative company using the SHOA.
- To develop random benchmark problem instances to evaluate the performance of the proposed SHOA and compare the results with other algorithms available in the literature.
2. Literature Review
2.1. Scheduling Problems with Carbon Footprint Minimization Objective
2.2. Literature Review on Pigeon-Inspired Optimization Algorithm (PIOA)
2.3. Literature Review on Firefly Algorithm (FA)
3. Problem Definition
Mathematical Formulation
- The number of stages and the number of machines are known.
- The number and the operating times of each job in the manufacturing process are both known in advance and cannot be changed.
- All the tasks involved in the production process are available at the first stage at time zero.
- The act of preemption is prohibited.
- For each job, their setup and transportation times are added to the operation times.
- Each machine can only process a single job at any given time.
- All machines are fully operational during the entire scheduled time frame (maintenance activities, i.e., machine breakdowns, are not taken into account).
- Only electrical power is used on the shop floor for the operation of machines.
4. Sequential Hybrid Optimization Algorithm (SHOA)
4.1. Pigeon-Inspired Optimization Algorithm (PIOA)
4.1.1. Map and Compass Operator
4.1.2. Landmark Operator
4.2. Firefly Algorithm
- All firefly species exhibit unisexuality, allowing any firefly to be attracted to another firefly regardless of their gender.
- The attractiveness factor is influenced by the level of light intensity. Therefore, while comparing two unique fireflies, the one that emits a lower level of brightness will be attracted to the one that emits a higher level of brightness. Also, attractiveness is affected by distance, and for both flies, it will decrease as the distance between them increases. For a given specific firefly, it will move randomly if there are no brighter fireflies.
- The brightness of a given species can be analyzed or measured with the shape of the objective value in a d-dimensional environment. For the maximization effort, the brightness is generally related to the objective function value. If the goal is to minimize, then brightness can be the inverse of the objective value.
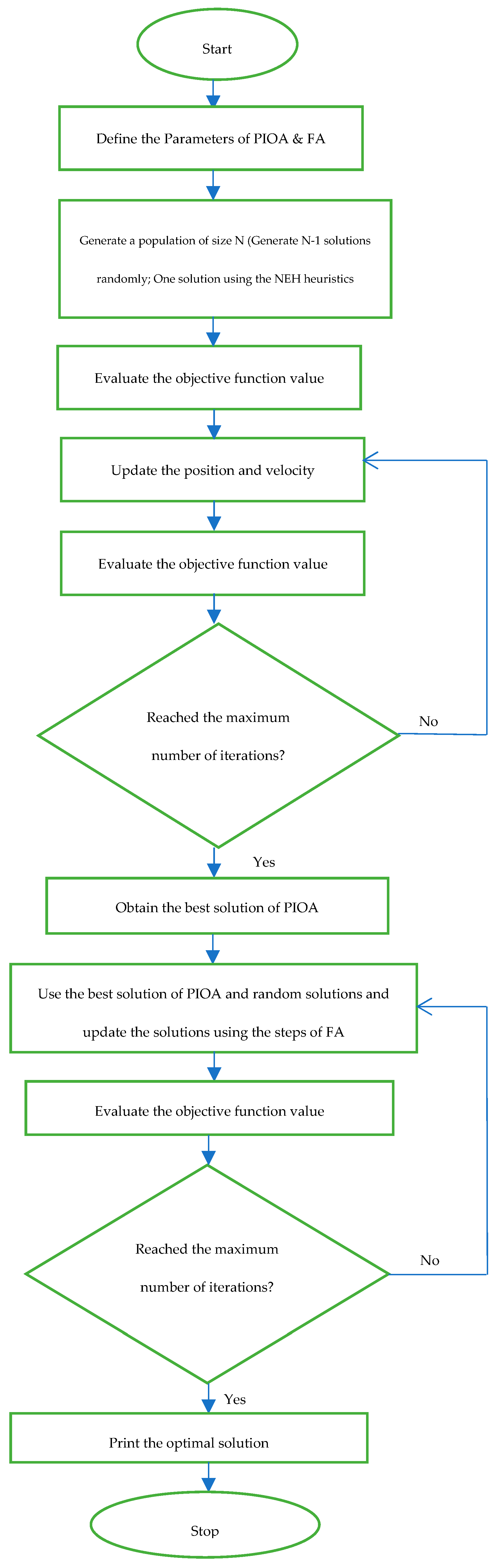
4.3. The Steps in SHOA
- The parameters of both the PIOA and FA are defined. For the PIOA, the dimensions of the pigeon group, the factor associated with the map and compass, the maximum number of iterations of the map and compass operator, and the maximum number of iterations of the landmark operator are the control parameters used for performance evaluation. The attractiveness of a firefly , the light absorption coefficient , and the randomization parameter , and the number of iterations N are the parameters of FA. The parameters used in [41] are used for the PIOA. The parameters available in the literature [66] are used in the present work for the FA.
- In a simple PIOA, the preliminary solutions are produced randomly. In this study, to improve the quality of the solution, a preliminary solution was generated using the NEH heuristics method as described by Nawaz et al. [84]. Then, we generated the remaining solutions arbitrarily. A uniform random number generator generates the continuous positional values randomly within the range of 0 and 1.
- Originally, the PIOA’s primary objective was to address optimization issues of a continuous nature. Hence, it is evident that the current version of PIOA is not suitable for directly addressing optimization issues that possess discrete characteristics. Bean [85] came up with the smallest position value (SPV) heuristic, which is used in this work to make continuous PIOA work for discrete flow shop scheduling problems.
- For each pigeon in the swarm, measure their objective function values. Based on these values, the best pigeon of the swarm, Xgbest, can be selected.
- Then, using the map and compass operations, update the velocity and position velocity of each species in the swarm.
- The objective function of all pigeons is evaluated, and the best pigeon, Xgbest, is determined.
- Steps 4 and 5 are iteratively executed until the designated number of iterations, denoted as N1, is reached.
- The landmark operator is executed to update the velocity and position of each pigeon.
- Iteratively repeat Step 7 until reaching the specified number of iterations, denoted as N2.
- By the end of step 8, the best solution for the PIOA is obtained.
- This solution is given as input to the Firefly algorithm. Step 10 provides the best solution, and in addition, some more solutions are randomly generated.
- For these solutions (fireflies), the light intensity (objective function value) is determined.
- Using the light absorption coefficient, the attractiveness of fireflies is calculated.
- With the help of attractiveness, the movement of the fireflies is updated (the solutions are updated).
- Steps 12 to 14 are continuously repeated until the previously determined number of generations is achieved.
- Print the best result.
4.4. Solution Representation
5. Computational Experiments
5.1. Data from a Furniture Manufacturing Industry
5.2. Experimental Simulation of the Algorithm
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Chs | The duration required to complete job h at stage s |
| CiM | The duration required to complete the job i at the stage M |
| Cis | The duration required to complete the job i at stage s |
| Cfp | Carbon footprint |
| Cmax | Makespan |
| N | Number of jobs to be scheduled (index i) |
| Psi | Operation time of the job i at stage s |
| Ri | Ready time of the job i |
| B | A consistent and unchanging value or quantity (B→∞) |
| M | The quantity of manufacturing stages (index s) |
| ms | The number of machines that exhibit similarity at a certain stage, denoted as s |
| Shs | The commencement time for a certain task, denoted as h, at a particular stage, denoted as s |
| Sis | The commencement time for a certain task, denoted as i, within a particular stage, referred to as s |
| Si1 | The commencement time for task i during the first stage |
| Whis | The binary variable takes the value of 1 when task h is scheduled before job i during processing at stage s, and 0 otherwise |
| Yijs | The binary variable takes the value of 1 when job i is allocated to machine j during step s, and 0 otherwise |
References
- Assia, S.; El Abbassi, I.; El Barkany, A.; Darcherif, M.; El Biyaali, A. Green scheduling of jobs and flexible periods of maintenance in a two-machine flowshop to minimize makespan, a measure of service level and total energy consumption. Adv. Oper. Res. 2020, 2020, 9732563. [Google Scholar] [CrossRef]
- Alvarez-Meaza, I.; Zarrabeitia-Bilbao, E.; Rio-Belver, R.M.; Garechana-Anacabe, G. Green scheduling to achieve green manufacturing: Pursuing a research agenda by mapping science. Technol. Soc. 2021, 67, 101758. [Google Scholar] [CrossRef]
- Hidri, L.; Alqahtani, A.; Gazdar, A.; Ben Youssef, B. Green scheduling of identical parallel machines with release date, delivery time and no-idle machine constraints. Sustainability 2021, 13, 9277. [Google Scholar] [CrossRef]
- Li, Y.Z.; Pan, Q.K.; Gao, K.Z.; Tasgetiren, M.F.; Zhang, B.; Li, J.Q. A green scheduling algorithm for the distributed flowshop problem. Appl. Soft Comput. 2021, 109, 107526. [Google Scholar] [CrossRef]
- Baker, K.R.; Trietsch, D. Principles of Sequencing and Scheduling, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2013; pp. 1–3. [Google Scholar]
- Pinedo, M.L. Scheduling: Theory, Algorithms, and Systems, 4th ed.; Springer: New York, NY, USA, 2012; pp. 13–33. [Google Scholar]
- Grabowski, J.; Pempera, J. Sequencing of jobs in some production system. Eur. J. Oper. Res. 2000, 125, 535–550. [Google Scholar] [CrossRef]
- Marichelvam, M.K.; Prabaharan, T.; Yang, X.S. Improved cuckoo search algorithm for hybrid flow shop scheduling problems to minimize makespan. Appl. Soft Comput. 2014, 19, 93–101. [Google Scholar] [CrossRef]
- Marichelvam, M.K.; Geetha, M. Application of novel harmony search algorithm for solving hybrid flow shop scheduling problems to minimise makespan. Int. J. Ind. Syst. Eng. 2016, 23, 467–481. [Google Scholar] [CrossRef]
- Deal, D.E.; Yang, T.; Hallquist, S. Job scheduling in petrochemical production: Two-stage processing with finite intermediate storage. Comput. Chem. Eng. 1994, 18, 333–344. [Google Scholar] [CrossRef]
- Jin, Z.H.; Ohno, K.; Ito, T.; Elmaghraby, S.E. Scheduling hybrid flowshops in printed circuit board assembly lines. Prod. Oper. Manag. 2002, 11, 216–230. [Google Scholar] [CrossRef]
- Arthanari, T.S.; Ramamurthy, K.G. An extension of two machines sequencing problem. Oper. Res. 1971, 8, 10–22. [Google Scholar]
- Gupta, J.N. Two-stage, hybrid flowshop scheduling problem. J. Oper. Res. Soc. 1988, 39, 359–364. [Google Scholar] [CrossRef]
- Hoogeveen, J.A.; Lenstra, J.K.; Veltman, B. Preemptive scheduling in a two-stage multiprocessor flow shop is NP-hard. Eur. J. Oper. Res. 1996, 89, 172–175. [Google Scholar] [CrossRef]
- Ruiz, R.; Vázquez-Rodríguez, J.A. The hybrid flow shop scheduling problem. Eur. J. Oper. Res. 2010, 205, 1–18. [Google Scholar] [CrossRef]
- Tosun, Ö.; Marichelvam, M.K.; Tosun, N. A literature review on hybrid flow shop scheduling. Int. J. Adv. Oper. Manag. 2020, 12, 156–194. [Google Scholar] [CrossRef]
- Mouzon, G.; Yildirim, M.B. A framework to minimise total energy consumption and total tardiness on a single machine. Int. J. Sustain. Eng. 2008, 1, 105–116. [Google Scholar] [CrossRef]
- Fang, K.; Uhan, N.; Zhao, F.; Sutherland, J.W. A new approach to scheduling in manufacturing for power consumption and carbon footprint reduction. J. Manuf. Syst. 2011, 30, 234–240. [Google Scholar] [CrossRef]
- Dai, M.; Tang, D.; Giret, A.; Salido, M.A.; Li, W.D. Energy-efficient scheduling for a flexible flow shop using an improved genetic-simulated annealing algorithm. Robot. Comput. Integ. Manuf. 2013, 29, 418–429. [Google Scholar] [CrossRef]
- Luo, H.; Du, B.; Huang, G.Q.; Chen, H.; Li, X. Hybrid flow shop scheduling considering machine electricity consumption cost. Int. J. Prod. Econ. 2013, 146, 423–439. [Google Scholar] [CrossRef]
- Liu, C.H.; Huang, D.H. Reduction of power consumption and carbon footprints by applying multi-objective optimisation via genetic algorithms. Int. J. Prod. Res. 2014, 52, 337–352. [Google Scholar] [CrossRef]
- Lin, W.; Yu, D.Y.; Zhang, C.; Liu, X.; Zhang, S.; Tian, Y.; Xie, Z. A multi-objective teaching−learning-based optimization algorithm to scheduling in turning processes for minimizing makespan and carbon footprint. J. Clean. Prod. 2015, 101, 337–347. [Google Scholar] [CrossRef]
- Ding, J.Y.; Song, S.; Wu, C. Carbon-efficient scheduling of flow shops by multi-objective optimization. Eur. J. Oper. Res. 2016, 248, 758–771. [Google Scholar] [CrossRef]
- Yan, J.; Li, L.; Zhao, F.; Zhang, F.; Zhao, Q. A multi-level optimization approach for energy-efficient flexible flow shop scheduling. J. Clean. Prod. 2016, 137, 1543–1552. [Google Scholar] [CrossRef]
- Lei, D.; Gao, L.; Zheng, Y. A novel teaching-learning-based optimization algorithm for energy-efficient scheduling in hybrid flow shop. IEEE Trans. Eng. Manag. 2017, 65, 330–340. [Google Scholar] [CrossRef]
- Liu, Q.; Zhan, M.; Chekem, F.O.; Shao, X.; Ying, B.; Sutherland, J.W. A hybrid fruit fly algorithm for solving flexible job-shop scheduling to reduce manufacturing carbon footprint. J. Clean. Prod. 2017, 168, 668–678. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Q.; Zhou, Y.; Ying, B. Integrated optimization of cutting parameters and scheduling for reducing carbon emissions. J. Clean. Prod. 2017, 149, 886–895. [Google Scholar] [CrossRef]
- Lu, C.; Gao, L.; Li, X.; Zheng, J.; Gong, W. A multi-objective approach to welding shop scheduling for makespan, noise pollution and energy consumption. J. Clean. Prod. 2018, 196, 773–787. [Google Scholar] [CrossRef]
- Nasiri, M.M.; Abdollahi, M.; Rahbari, A.; Salmanzadeh, N.; Salesi, S. Minimizing the energy consumption and the total weighted tardiness for the flexible flowshop using NSGA-II and NRGA. J. Ind. Syst. Eng. 2018, 11, 150–162. [Google Scholar]
- Pan, Z.; Lei, D.; Zhang, Q. A new imperialist competitive algorithm for multiobjective low carbon parallel machines scheduling. Math. Probl. Eng. 2018, 2018, 5914360. [Google Scholar] [CrossRef]
- Piroozfard, H.; Wong, K.Y.; Wong, W.P. Minimizing total carbon footprint and total late work criterion in flexible job shop scheduling by using an improved multi-objective genetic algorithm. Res. Conser. Recycl. 2018, 128, 267–283. [Google Scholar] [CrossRef]
- Wu, X.; Shen, X.; Cui, Q. Multi-objective flexible flow shop scheduling problem considering variable processing time due to renewable energy. Sustainability 2018, 10, 841. [Google Scholar] [CrossRef]
- Meng, L.; Zhang, C.; Shao, X.; Ren, Y.; Ren, C. Mathematical modelling and optimisation of energy-conscious hybrid flow shop scheduling problem with unrelated parallel machines. Int. J. Prod. Res. 2019, 57, 1119–1145. [Google Scholar] [CrossRef]
- Zhou, B.; Liu, W. Energy-efficient multi-objective scheduling algorithm for hybrid flow shop with fuzzy processing time. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 233, 1282–1297. [Google Scholar] [CrossRef]
- Chen, T.L.; Cheng, C.Y.; Chou, Y.H. Multi-objective genetic algorithm for energy-efficient hybrid flow shop scheduling with lot streaming. Ann. Oper. Res. 2020, 290, 813–836. [Google Scholar] [CrossRef]
- Wang, S.; Wang, X.; Chu, F.; Yu, J. An energy-efficient two-stage hybrid flow shop scheduling problem in a glass production. Int. J. Prod. Res. 2020, 58, 2283–2314. [Google Scholar] [CrossRef]
- Cai, J.; Lei, D. A cooperated shuffled frog-leaping algorithm for distributed energy-efficient hybrid flow shop scheduling with fuzzy processing time. Complex Intell. Syst. 2021, 7, 2235–2253. [Google Scholar] [CrossRef]
- Shi, L.; Guo, G.; Song, X. Multi-agent based dynamic scheduling optimisation of the sustainable hybrid flow shop in a ubiquitous environment. Int. J. Prod. Res. 2021, 59, 576–597. [Google Scholar] [CrossRef]
- Wang, J.J.; Wang, L. A cooperative memetic algorithm with learning-based agent for energy-aware distributed hybrid flow-Shop scheduling. IEEE Trans. Evol. Comput. 2022, 26, 461–475. [Google Scholar] [CrossRef]
- Zuo, Y.; Fan, Z.; Zou, T.; Wang, P. A Novel Multi-Population Artificial Bee Colony Algorithm for Energy-Efficient Hybrid Flow Shop Scheduling Problem. Symmetry 2021, 13, 2421. [Google Scholar] [CrossRef]
- Duan, H.; Qiao, P. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning. Int. J. Intell. Comput. Cybern. 2014, 7, 24–37. [Google Scholar] [CrossRef]
- Duan, H.; Wang, X. Echo state networks with orthogonal pigeon-inspired optimization for image restoration. IEEE Trans. Neural Netw. Learn. Syst. 2015, 27, 2413–2425. [Google Scholar] [CrossRef]
- Varun, A.; Kumar, M.S. A comprehensive review of the pigeon-inspired optimization algorithm. Int. J. Eng. Technol. 2018, 7, 758–761. [Google Scholar]
- Zhong, Y.; Wang, L.; Lin, M.; Zhang, H. Discrete pigeon-inspired optimization algorithm with Metropolis acceptance criterion for large-scale traveling salesman problem. Swarm Evolut. Comput. 2019, 48, 134–144. [Google Scholar] [CrossRef]
- Goel, S. Pigeon optimization algorithm: A novel approach for solving optimization problems. In Proceedings of the 2014 International Conference on Data Mining and Intelligent Computing, Delhi, India, 5–6 September 2014. [Google Scholar]
- Hao, R.; Luo, D.; Duan, H. Multiple UAVs mission assignment based on modified pigeon-inspired optimization algorithm. In Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014. [Google Scholar]
- Sun, H.; Duan, H. PID controller design based on prey-predator pigeon-inspired optimization algorithm. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014. [Google Scholar]
- Zhang, B.; Duan, H. Predator-Prey Pigeon-Inspired Optimization for UAV Three-Dimensional Path Planning. In Advances in Swarm Intelligence, 1st ed.; Tan, Y., Shi, Y., Coello, C.A.C., Eds.; Springer: Cham, Switzerland, 2014; Volume 8795, pp. 96–105. [Google Scholar]
- Deng, Y.; Zhu, W.; Duan, H. Hybrid membrane computing and pigeon-inspired optimization algorithm for brushless direct current motor parameter design. Sci. China Technol. Sci. 2016, 59, 1435–1441. [Google Scholar] [CrossRef]
- Hu, C.; Xia, Y.; Zhang, J. Adaptive operator quantum-behaved pigeon-inspired optimization algorithm with application to UAV path planning. Algorithms 2018, 12, 3. [Google Scholar] [CrossRef]
- Pei, J.; Su, Y.; Zhang, D. Fuzzy energy management strategy for parallel HEV based on pigeon-inspired optimization algorithm. Sci. China Technol. Sci. 2017, 60, 425–433. [Google Scholar] [CrossRef]
- Rehman, M.H.A.; Javaid, N.; Iqbal, M.N.; Abbas, Z.; Awais, M.; Khan, A.J.; Qasim, U. Demand side management using hybrid genetic algorithm and pigeon inspired optimization techniques. In Proceedings of the 2018 IEEE 32nd International Conference on Advanced Information Networking and Applications, Kraków, Poland, 16–18 May 2018. [Google Scholar]
- Liu, H.; Yan, X.; Wu, Q. An improved pigeon-inspired optimisation algorithm and its application in parameter inversion. Symmetry 2019, 11, 1291. [Google Scholar] [CrossRef]
- Shang, J.; Li, Y.; Sun, Y.; Li, F.; Zhang, Y.; Liu, J.X. MOPIO: A Multi-Objective Pigeon-Inspired Optimization Algorithm for Community Detection. Symmetry 2020, 13, 49. [Google Scholar] [CrossRef]
- Bolaji, A.L.A.; Okwonu, F.Z.; Shola, P.B.; Balogun, B.S.; Adubisi, O.D. A modified binary pigeon-inspired algorithm for solving the multi-dimensional knapsack problem. J. Intell. Syst. 2021, 30, 90–103. [Google Scholar] [CrossRef]
- Pan, J.S.; Tian, A.Q.; Chu, S.C.; Li, J.B. Improved binary pigeon-inspired optimization and its application for feature selection. Appl. Intell. 2021, 51, 8661–8679. [Google Scholar] [CrossRef]
- Zhun, X.; Liyun, X.; Xufeng, L. An Improved Pigeon-inspired Optimization Algorithm for Solving Dynamic Facility Layout Problem with Uncertain Demand. Procedia CIRP 2021, 104, 1203–1208. [Google Scholar] [CrossRef]
- Hussein, R.B.; Algamal, Z. Solving 0–1 knapsack problem by an improved binary Pigeon Inspired Optimization Algorithm. Math. Stat. Eng. Appl. 2022, 71, 312–324. [Google Scholar]
- Ramalingam, R.; Karunanidy, D.; Alshamrani, S.S.; Rashid, M.; Mathumohan, S.; Dumka, A. Oppositional Pigeon-Inspired Optimizer for Solving the Non-Convex Economic Load Dispatch Problem in Power Systems. Mathematics 2022, 10, 3315. [Google Scholar] [CrossRef]
- Fu, X.; Chan, F.T.; Niu, B.; Chung, N.S.; Qu, T. A multi-objective pigeon inspired optimization algorithm for fuzzy production scheduling problem considering mould maintenance. Sci. China Inform. Sci. 2019, 62, 1–18. [Google Scholar] [CrossRef]
- Wu, X.; Shen, X.; Zhao, N.; Wu, S. An improved discrete pigeon-inspired optimisation algorithm for flexible job shop scheduling problem. Int. J. Bio-Inspired Comput. 2020, 16, 181–194. [Google Scholar] [CrossRef]
- Lei, T.; Luo, C.; Sellers, T.; Rahimi, S. A bat-pigeon algorithm to crack detection-enabled autonomous vehicle navigation and mapping. Intell. Syst. Appl. 2021, 12, 20053. [Google Scholar] [CrossRef]
- Ding, G.; Dong, F. An improved pigeon-inspired optimisation for continuous function optimisation problems. Int. J. Comput. Sci. Math. 2023, 17, 207–219. [Google Scholar] [CrossRef]
- Torky, M.; Gad, I.; Hassanien, A.E. Explainable AI Model for Recognizing Financial Crisis Roots Based on Pigeon Optimization and Gradient Boosting Model. Int. J. Comput. Intell. Syst. 2023, 16, 50. [Google Scholar] [CrossRef]
- Yang, X.S.; He, X. Firefly algorithm: Recent advances and applications. Int. J. Swarm Intell. 2013, 1, 36–50. [Google Scholar] [CrossRef]
- Marichelvam, M.K.; Prabaharan, T.; Yang, X.S. A discrete firefly algorithm for the multi-objective hybrid flowshop scheduling problems. IEEE Trans. Evol. Comput. 2013, 18, 301–305. [Google Scholar] [CrossRef]
- Karthikeyan, S.; Asokan, P.; Nickolas, S. A hybrid discrete firefly algorithm for multi-objective flexible job shop scheduling problem with limited resource constraints. Int. J. Adv. Manuf. Technol. 2014, 72, 1567–1579. [Google Scholar] [CrossRef]
- Fan, B.; Yang, W.; Zhang, Z. Solving the two-stage hybrid flow shop scheduling problem based on mutant firefly algorithm. J. Ambient Intell. Humaniz. Comput. 2019, 10, 979–990. [Google Scholar] [CrossRef]
- Marichelvam, M.K.; Geetha, M. Solving tri-objective multistage hybrid flow shop scheduling problems using a discrete firefly algorithm. Int. J. Intell. Eng. Inform. 2014, 2, 284–303. [Google Scholar] [CrossRef]
- Chakaravarthy, G.V.; Marimuthu, S.; Sait, A.N. Comparison of firefly algorithm and artificial immune system algorithm for lot streaming in m-machine flow shop scheduling. Int. J. Comput. Intell. Syst. 2012, 5, 1184–1199. [Google Scholar] [CrossRef]
- Marichelvam, M.K.; Geetha, M. A hybrid discrete firefly algorithm to solve flow shop scheduling problems to minimise total flow time. Int. J. Bio-Inspired Comput. 2016, 8, 318–325. [Google Scholar] [CrossRef]
- Qamhan, M.A.; Qamhan, A.A.; Al-Harkan, I.M.; Alotaibi, Y.A. Mathematical modeling and discrete firefly algorithm to optimize scheduling problem with release date, sequence-dependent setup time, and periodic maintenance. Math. Prob. Eng. 2019, 2019, 8028759. [Google Scholar] [CrossRef]
- Lo, H.L.; Fong, S.; Zhuang, Y.; Wang, X.; Hanne, T. Applying a chaos-based firefly algorithm to the permutation flow shop scheduling problem. In Proceedings of the 2015 3rd International Symposium on Computational and Business Intelligence, Bali, Indonesia, 7–8 December 2015. [Google Scholar]
- Kaya, S.; Gümüşçü, A.; Aydilek, İ.B.; Karaçizmeli, İ.H.; Tenekeci, M.E. Solution for flow shop scheduling problems using chaotic hybrid firefly and particle swarm optimization algorithm with improved local search. Soft Comput. 2021, 25, 7143–7154. [Google Scholar] [CrossRef]
- Rashid, M.F.F.A.; Osman, M.A.H. Optimisation of energy efficient hybrid flowshop scheduling problem using firefly algorithm. In Proceedings of the 2020 IEEE 10th Symposium on Computer Applications & Industrial Electronics, Penang, Malaysia, 18–19 April 2020. [Google Scholar]
- Tilahun, S.L.; Ngnotchouye, J.M.T.; Hamadneh, N.N. Continuous versions of firefly algorithm: A review. Artif. Intell. Rev. 2019, 51, 445–492. [Google Scholar] [CrossRef]
- Kumar, V.; Kumar, D. A systematic review on firefly algorithm: Past, present, and future. Arch. Comput. Methods Eng. 2021, 28, 3269–3291. [Google Scholar] [CrossRef]
- Ghasemi, M.; Kadkhoda Mohammadi, S.; Zare, M.; Mirjalili, S.; Gil, M.; Hemmati, R. A new firefly algorithm with improved global exploration and convergence with application to engineering optimization. Decis. Analyt. J. 2022, 5, 100125. [Google Scholar] [CrossRef]
- Bacanin, N.; Venkatachalam, K.; Bezdan, T.; Zivkovic, M.; Abouhawwash, M. A novel firefly algorithm approach for efficient feature selection with COVID-19 dataset. Microprocess. Microsyst. 2023, 98, 104778. [Google Scholar] [CrossRef]
- Ezzeldin, R.; Zelenakova, M.; Abd-Elhamid, H.F.; Pietrucha-Urbanik, K.; Elabd, S. Hybrid Optimization Algorithms of Firefly with GA and PSO for the Optimal Design of Water Distribution Networks. Water 2023, 15, 1906. [Google Scholar] [CrossRef]
- Sheeba, A.; Uma Maheswari, B. An efficient fault tolerance scheme based enhanced firefly optimization for virtual machine placement in cloud computing. Concurr. Comput. Pract. Exp. 2023, 35, e7610. [Google Scholar] [CrossRef]
- Villaruz, J.A.; Gerardo, B.D.; Gamao, A.O.; Medina, R.P. Scouting Firefly Algorithm and its Performance on Global Optimization Problems. Int. J. Adv. Comput. Sci. Appl. 2023, 14, 445–451. [Google Scholar] [CrossRef]
- Paternina-Arboleda, C.D.; Montoya-Torres, J.R.; Acero-Dominguez, M.J.; Herrera-Hernandez, M.C. Scheduling jobs on a k-stage flexible flow-shop. Ann. Oper. Res. 2008, 164, 29–40. [Google Scholar] [CrossRef]
- Nawaz, M.; Enscore, E.E., Jr.; Ham, I. A heuristic algorithm for the m-machine, n-job flow-shop sequencing problem. Omega 1983, 11, 91–95. [Google Scholar] [CrossRef]
- Bean, J.C. Genetic algorithms and random keys for sequencing and optimization. ORSA J. Comput. 1994, 6, 154–160. [Google Scholar] [CrossRef]
- Bureau of Energy Efficiency, Ministry of Power, Govt. of India. Available online: https://cea.nic.in/wp-content/uploads/tpe___cc/2022/02/User_Guide__ver_17_2021.pdf (accessed on 21 October 2022).



{kind=link}
{kind=link}
{kind=link}
| Dimension j | ||||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| yij | 0.66 | 0.18 | 0.79 | 0.30 | 0.58 | 0.86 |
| jobs | 4 | 1 | 5 | 2 | 3 | 6 |
| Stage No. | Stage Name | Number of Machines | Power Requirements (in kW) |
|---|---|---|---|
| I | Punching | 6 | 7.50 |
| II | Bending | 8 | 1.50 |
| III | Welding | 6 | 4.50 |
| IV | Power pressing | 3 | 3.75 |
| V | Drilling | 1 | 1.00 |
| Jobs→ Stages↓ | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| I | 60 | 36 | 60 | 60 | 24 | 60 | 30 | 18 | 48 | 60 | 0 | 0 | 48 | 0 | 0 | 72 | 0 | 0 | 0 | 0 |
| II | 48 | 64 | 24 | 0 | 32 | 16 | 0 | 0 | 72 | 24 | 0 | 0 | 80 | 0 | 0 | 56 | 0 | 0 | 0 | 0 |
| III | 0 | 12 | 60 | 0 | 0 | 72 | 0 | 0 | 60 | 24 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| IV | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 72 | 0 | 0 | 90 | 30 | 0 | 60 | 30 | 0 | 75 | 60 | 48 | 72 |
| V | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 40 | 0 | 0 | 0 | 0 |
| Name of the Parameter | Values |
|---|---|
| Number of jobs | 100 |
| Number of stages | 2, 5, 10 |
| Number of machines at each stage | 2, 5, 10 |
| Statistical distribution to generate processing times | U (0, 100) |
| The power rating of machines (kW) | U (1, 100) |
| The attractiveness of the species in FA (β0) | 0, 0.50 and 1.00 |
| Coefficient of light absorption, γ | 0.50, 0.75 and 1.00 |
| Randomization factor, α | 0, 0.50 and 1.00 |
| Max. number of iterations for the map and compass operator | 100 |
| Max. number of iterations for landmark operator | 200 |
| Max. number of generations of FA | 500 |
| Sl. No. | Algorithms | MRDI |
|---|---|---|
| 1 | ACO | 3.16 |
| 2 | ABC | 5.32 |
| 3 | CSFLA | 4.64 |
| 4 | FA | 2.42 |
| 5 | GA | 7.42 |
| 6 | HCMA | 9.42 |
| 7 | ICA | 7.91 |
| 8 | PIOA | 2.68 |
| 9 | SHOA (present work) | 0.00 |
| 10 | TLBOA | 5.46 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geetha, M.; Chandra Guru Sekar, R.; Marichelvam, M.K.; Tosun, Ö. A Sequential Hybrid Optimization Algorithm (SHOA) to Solve the Hybrid Flow Shop Scheduling Problems to Minimize Carbon Footprint. Processes 2024, 12, 143. https://doi.org/10.3390/pr12010143
Geetha M, Chandra Guru Sekar R, Marichelvam MK, Tosun Ö. A Sequential Hybrid Optimization Algorithm (SHOA) to Solve the Hybrid Flow Shop Scheduling Problems to Minimize Carbon Footprint. Processes. 2024; 12(1):143. https://doi.org/10.3390/pr12010143
Chicago/Turabian StyleGeetha, M., R. Chandra Guru Sekar, M. K. Marichelvam, and Ömür Tosun. 2024. "A Sequential Hybrid Optimization Algorithm (SHOA) to Solve the Hybrid Flow Shop Scheduling Problems to Minimize Carbon Footprint" Processes 12, no. 1: 143. https://doi.org/10.3390/pr12010143
APA StyleGeetha, M., Chandra Guru Sekar, R., Marichelvam, M. K., & Tosun, Ö. (2024). A Sequential Hybrid Optimization Algorithm (SHOA) to Solve the Hybrid Flow Shop Scheduling Problems to Minimize Carbon Footprint. Processes, 12(1), 143. https://doi.org/10.3390/pr12010143