2.2.1. Optimization Model Construction
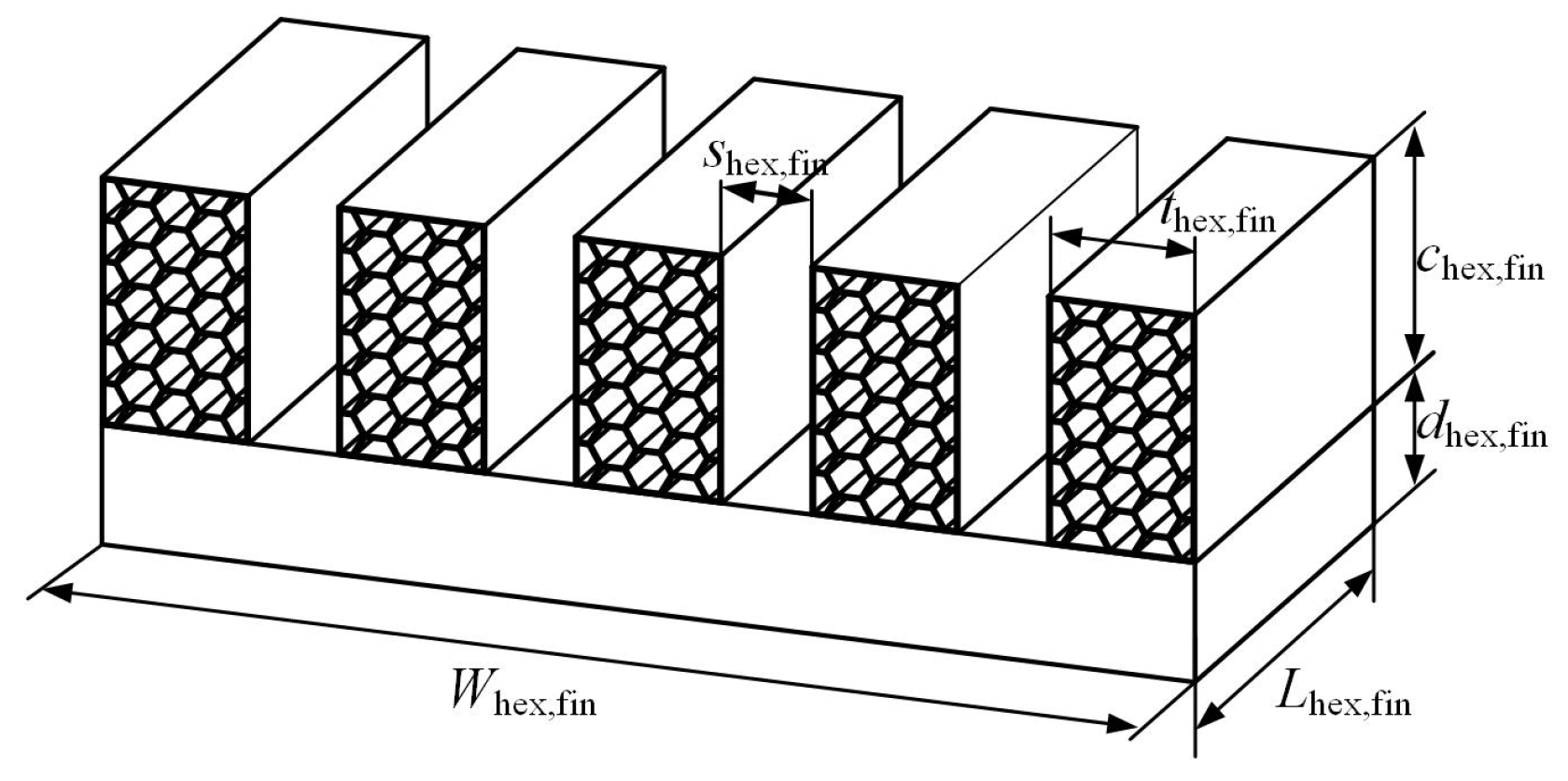
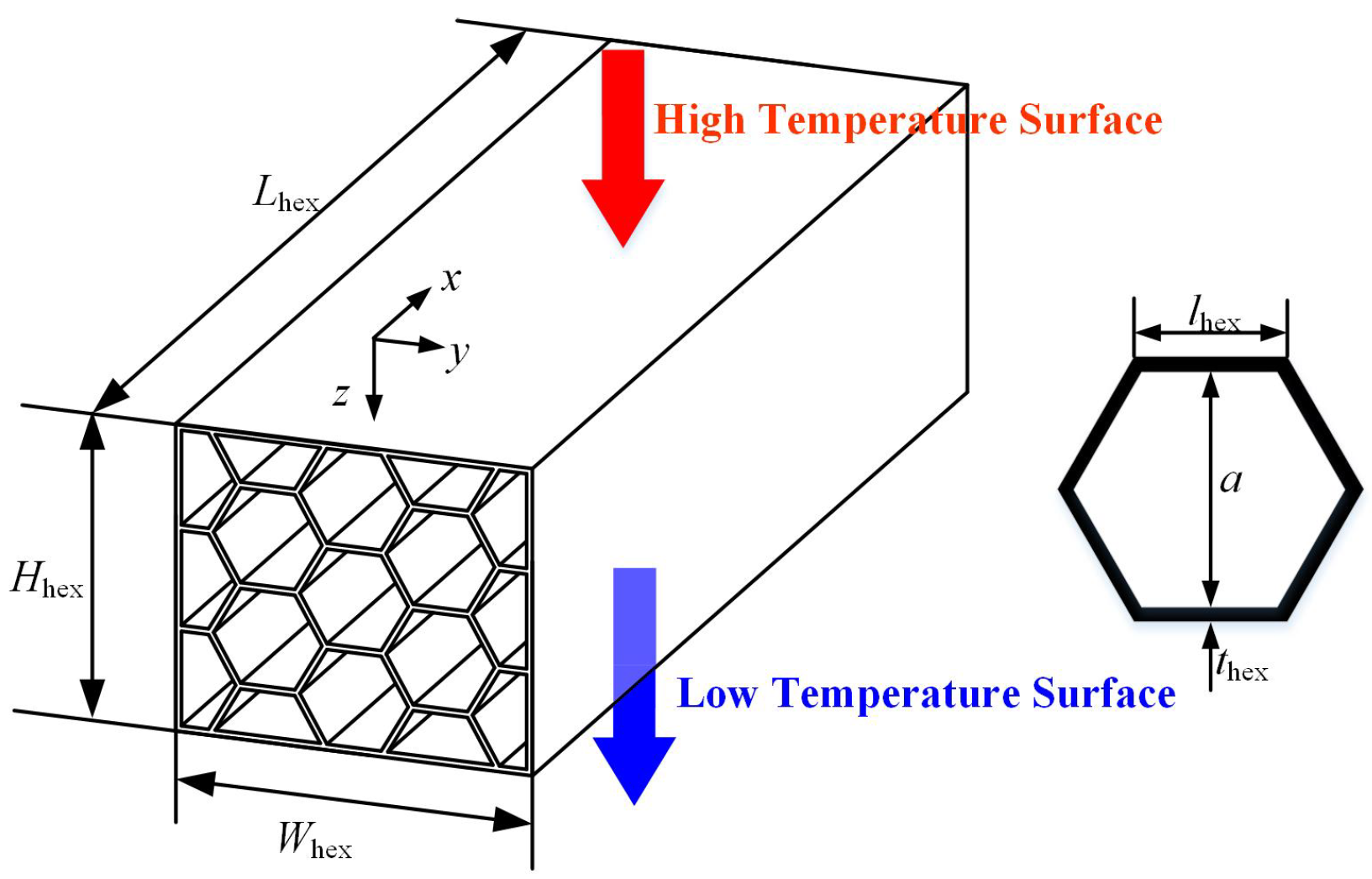
The structure of HCS can be seen in
Figure 2. Assuming the material is uniform, the mass model can be defined as follows:
where
is the mass of HCS;
,
, and
represent the length, width and height of the HCS, respectively;
is the density of the material; and
is the volume ratio of the solid in HCS, which can be calculated as
where
is the shape factor, which is associated with the shape of the honeycomb cell; and
and
denote the side length and wall thickness of a single honeycomb cell, respectively.
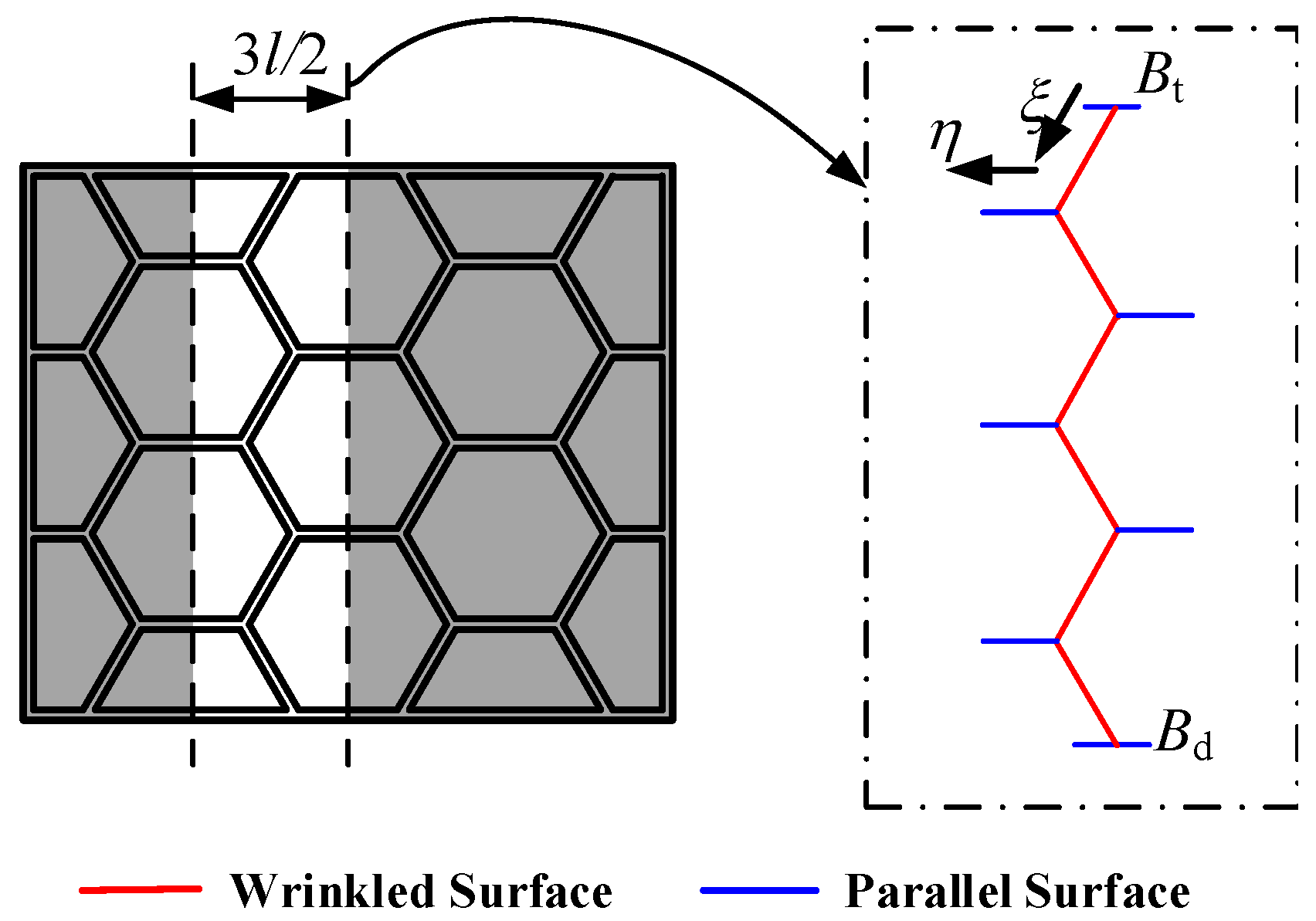
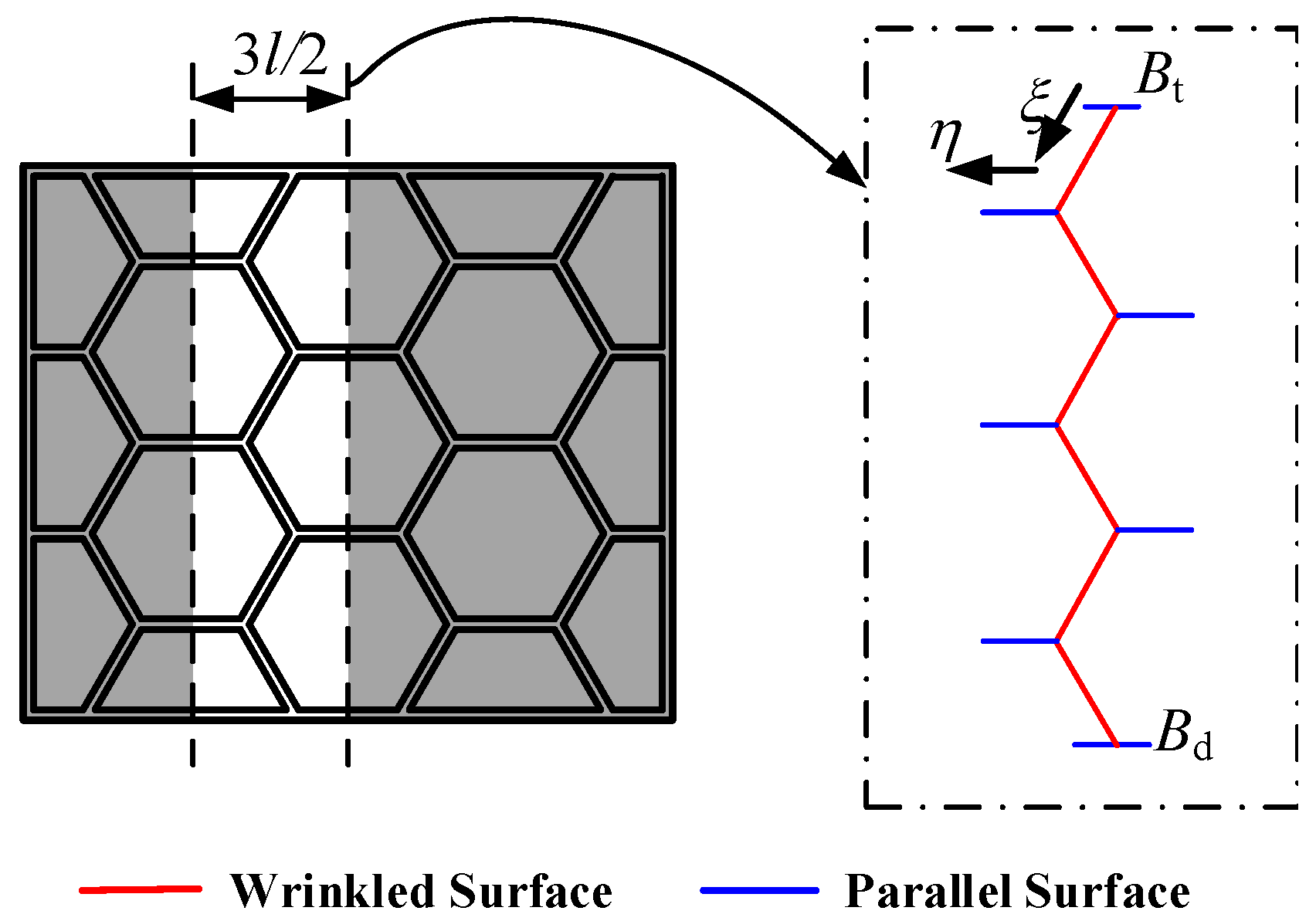
A single-cycle honeycomb calculation model is constructed along the y-axis for a specific cross-section in the x-axis direction to analyze the thermal resistance of the honeycomb heat sink, as shown in
Figure 3. Moreover, in order to calculate the thermal resistance more easily and accurately, the following assumptions were taken into consideration:
The honeycombs are uniformly and periodically distributed along the y-axis;
The air temperature in the cross section which is parallel to the y–z plane is the same;
The surface parallel to the x–y plane is called a parallel surface, and the internal honeycomb cell surface is called a wrinkled surface;
The temperature of the upper parallel surface is high.
The differential equation for the thermal conductivity of the wrinkled wall surface can be established as follows according to the heat transfer theorem [
21,
22].
where
and
represent the temperature of the wrinkled surface and air on the cross section, respectively;
is the local coordinate of the wrinkled surface;
is the thermal conductivity of the honeycomb material; and
is the convective heat transfer coefficient which can be calculated as follows:
where
is the air thermal conductivity;
is the hydraulic diameter of the honeycomb cell, and, for a regular hexagon,
,
is the height of a single honeycomb cell; and
is the Nussle number of the honeycomb cell.
The boundary conditions for the upper and lower parallel surfaces of the HCS are given as follows:
where
is the power decrease per unit area of the wrinkled wall surface;
is the bending scale factor of the wrinkled wall surface; and
is the convective heat transfer coefficient between the lower surface and the air.
Equation (
3) can be re-expressed as Equation (
6) when we let
,
.
The general solution of Equation (
6) can be expressed as
The temperature distribution of the wrinkled wall surface can be finally obtained as Equation (
8) by combining Equations (
5) and (
7).
where
and
are the coefficients and can be expressed, respectively, as follows:
where
is the temperature of the atmosphere; and
,
represent the middle coefficients which can be defined, respectively, as follows.
Therefore, the heat entering the upper parallel surface and exiting the lower parallel surface underneath per unit length in the x-axis direction can be obtained separately as follows:
where
and
represent the heat entering and exiting the HCS through the upper and lower parallel surfaces under the unit and the length in x-axis direction, respectively. Therefore, the heat entering the air through the wrinkled surface can be obtained according to Equations (
13) and (
14) as follows:
where
is the heat entering the air through the wrinkled surface underneath per unit length. The heat entering the air from the upper and lower parallel surfaces is further known to be
where
is the heat entering the air from the upper and lower parallel surfaces; and
is the honeycomb cell number along the y-axis.
The air temperature change on the cross-section along the x-axis can be obtained based on the gas energy balance equation by combining Equations (
15) and (
16).
The air temperature distribution inside the honeycomb along the x-axis can be expressed as follows:
where
is the HCS inlet air temperature, and
is an intermediate variable which can be obtained as follows:
where
to
are the intermediate variables used to calculate
.
According to Equation (
18), the heat dissipation of the HCS can be expressed as follows:
Furthermore, the equivalent heat transfer coefficient of the HCS can be defined as
where
is the average temperature difference between the HCS and its internal air, which can be expressed as
where
and
are intermediate variables which can be represented, respectively, as follows:
Finally, the equivalent thermal resistance can be obtained as
2.2.2. Parameter Optimization Design of the Honeycomb Cell
In order to obtain the optimal parameters for the honeycomb cell, the MOPSO algorithm is adopted. MOPSO is based on the particle swarm optimization algorithm (PSO) and Pareto theory, and this has many advantages: the optimization problem is less restrictive; the search process is more inspiring; the search can be spread over the entire space of the parameter definition domain; and the probability of finding the optimal solution is greater [
23,
24,
25,
26,
27]. MOPSO has been widely used in a variety of applications, including neural networks, machine learning, data mining and adaptive control.
Therefore, the side length
and wall thickness
of the honeycomb cell and the height of the HCS
are selected as the design variables. Moreover, in order to simplify the calculation, the numbers of the honeycomb cells are used to represent the height of the HCS. The range of values is shown in
Table 1. Meanwhile, the length, width and basement height of the HCS are defined as 70 mm, 50 mm and 5 mm, respectively. Furthermore, the optimization objectives of the HCS can be defined as follows for a certain length, width and height of the HCS.
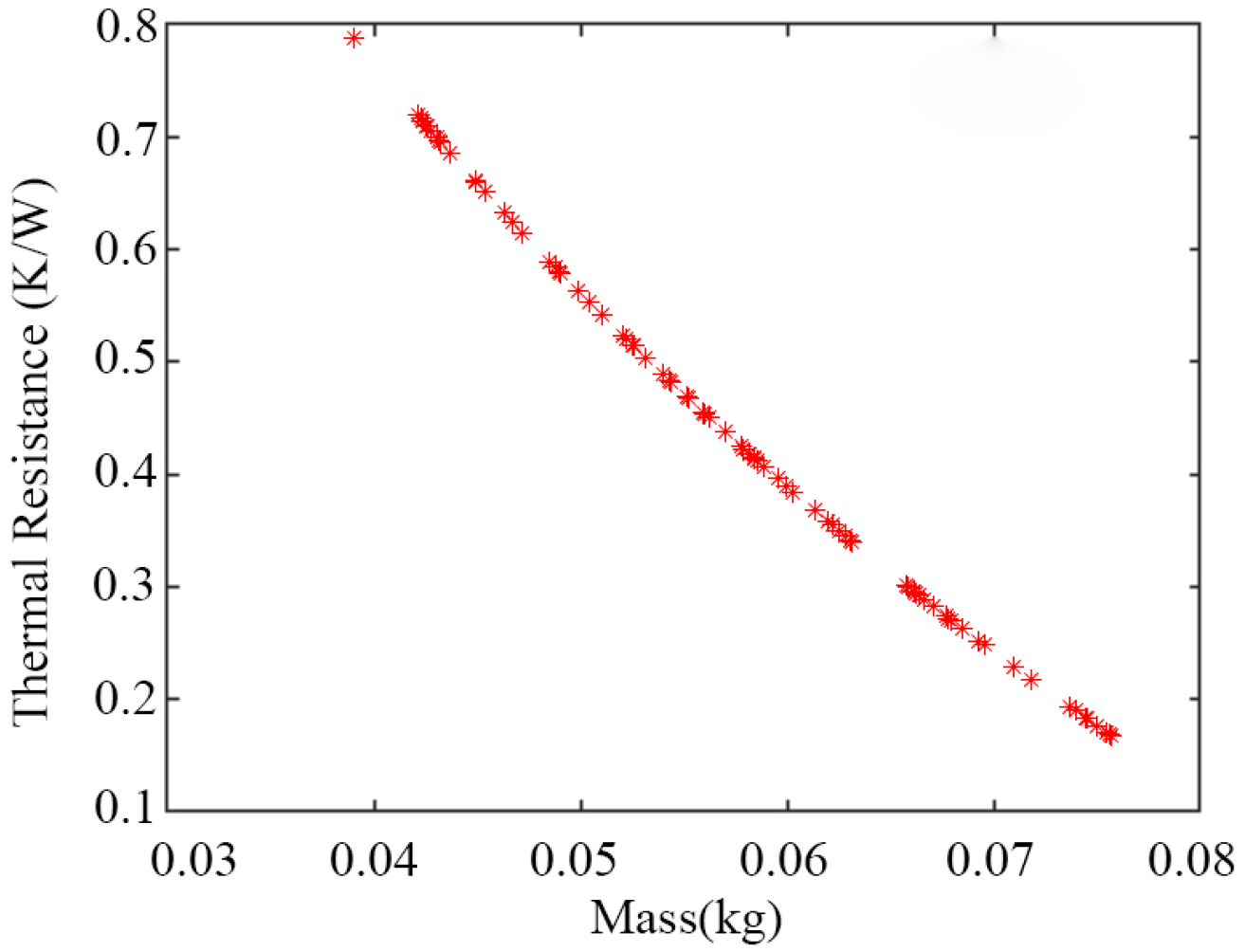
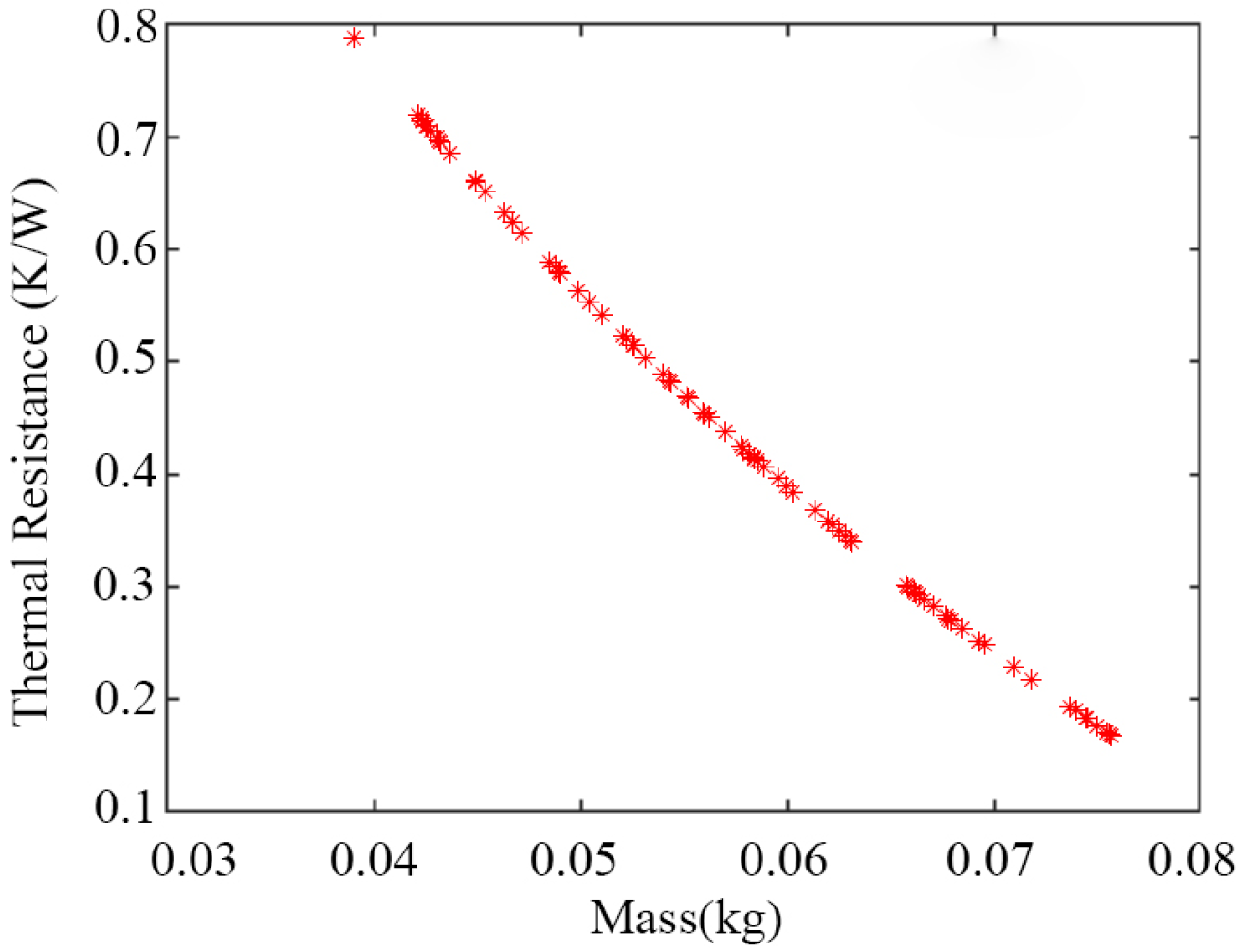
The particle population size is set to 300, the size of the external reserve is set to 120, and the number of iterations is set to 200 during the simulation. The Pareto front of the optimization results can be obtained, as seen in
Figure 4, according to MOPSO. As shown in the figure, the range of thermal resistance is 0.2 K/W∼0.8 K/W, and the range of the mass is 0.03 kg∼0.08 kg. Overall, the changes in the values of thermal resistance and mass demonstrate an opposite relationship.
It should be noted that the Pareto front is a set of optimized solutions, and how to select the optimal design parameters from the Pareto front requires further analysis. Therefore, in order to obtain an optimal set of design parameters in the Pareto front solutions, a parameter relationship matrix (PRM) for the heat sink is constructed based on the quality function development (QFD) method [
28,
29]. The PRM can express the degree of correlation between each component of the system and the characteristic parameters of the system. Different system characteristics can use different weight coefficients to express the overall evaluation index of the system [
30,
31]. The PRM of the heat sink can be established as
Table 2. The greater the weight of the characteristic parameters in the table, the greater the importance of the feature parameter to the system. The weight Y indicates the requirement that the system must satisfy. Generally, the value range of the weight can be defined as [1, 5]. Moreover, mass is the decisive indicator to determine whether EHA can be applied, and so its weight value is assigned as 5. The heat dissipation capability is one of the important and guaranteed methods for the reliability of the EHA system, and its importance is relatively weak compared with the mass, so its weight value is assigned as 3.
Furthermore, the comprehensive evaluation function of the ribbed heat sink can be constructed as follows, according to the PRM.
where
F is the comprehensive evaluation function,
respects the mass,
is the thermal resistance, and
and
are the initial values of mass and thermal resistance, respectively, which can taken as
and
.
and
are the coefficients associated with the weight in
Table 2, and the expressions of
and
can be described as
where
and
are the weight values of mass and thermal resistance, respectively.
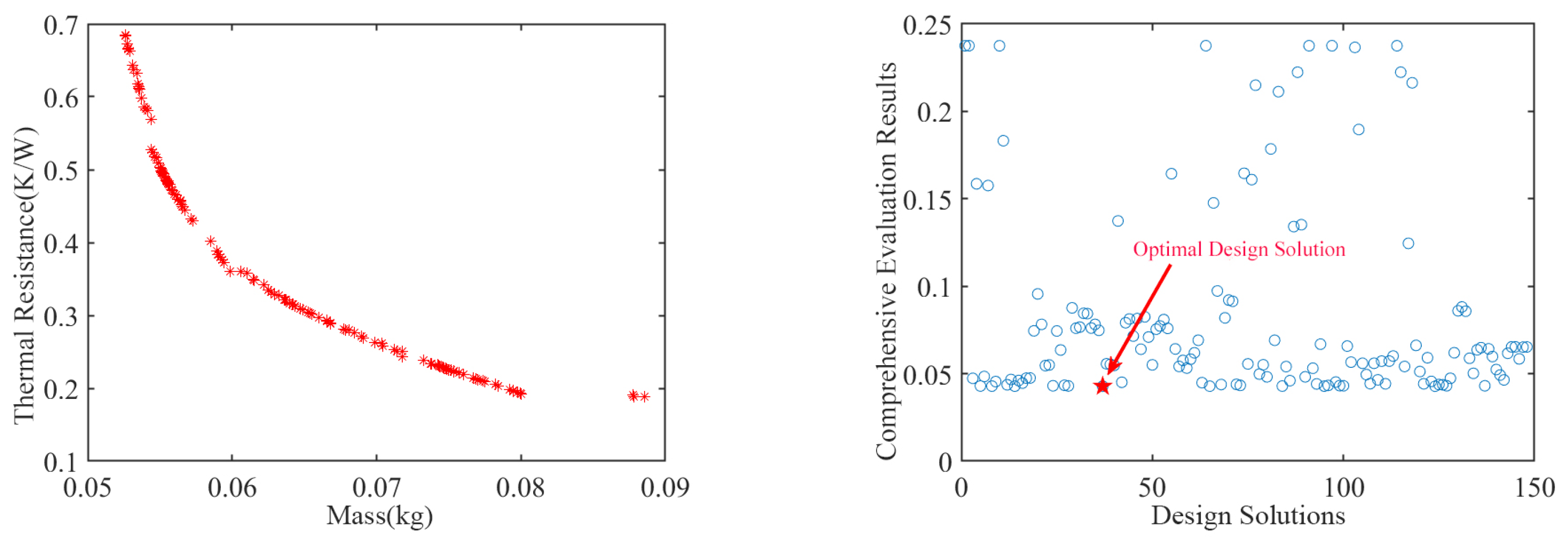
Finally, the comprehensive evaluation results of each design solution in the Pareto front set can be obtained as seen in
Figure 5. The smallest evaluation result in the figure can be regarded as the optimal design solution, which is listed in
Table 3.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}