
Research on Path Tracking and Yaw Stability Coordination Control Strategy for Four-Wheel Independent Drive Electric Trucks


Abstract
:
1. Introduction
2. Vehicle Model
2.1. 2DOF Vehicle Reference Model
2.2. Vehicle State Reference Value
2.3. 7DOF Vehicle Dynamics Model
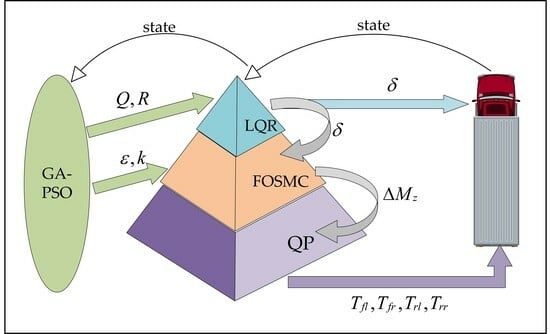
3. Coordinated Control Strategy for Path Tracking and Yaw Stability
3.1. Design of Upper Layer Path Tracking Controller
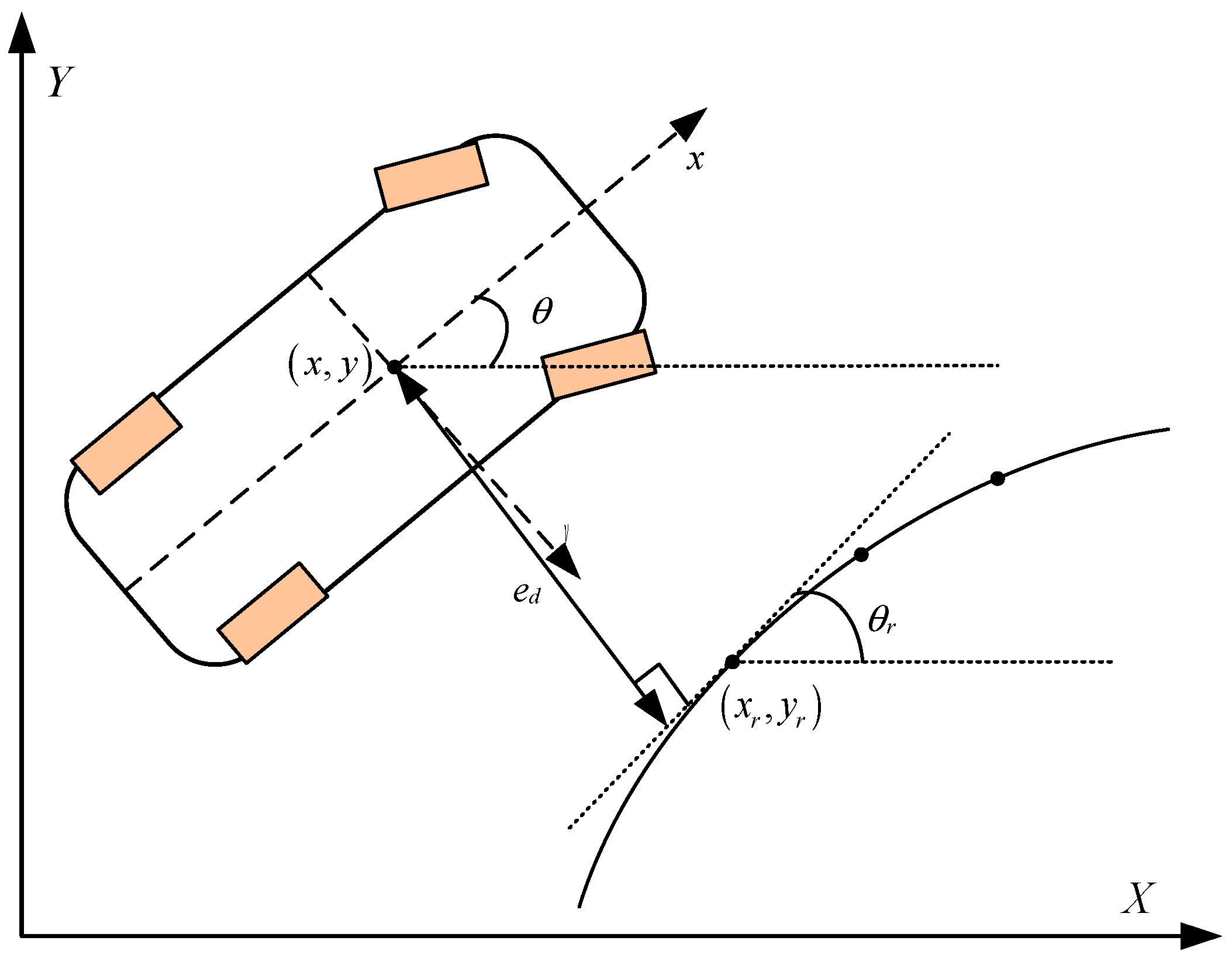
3.1.1. Vehicle Path Tracking Model
3.1.2. Path Tracking Error Model
3.1.3. Preview Model
3.1.4. Design of LQR Controller
3.1.5. Feedforward Control
3.2. Design of Middle Layer Stability Controller
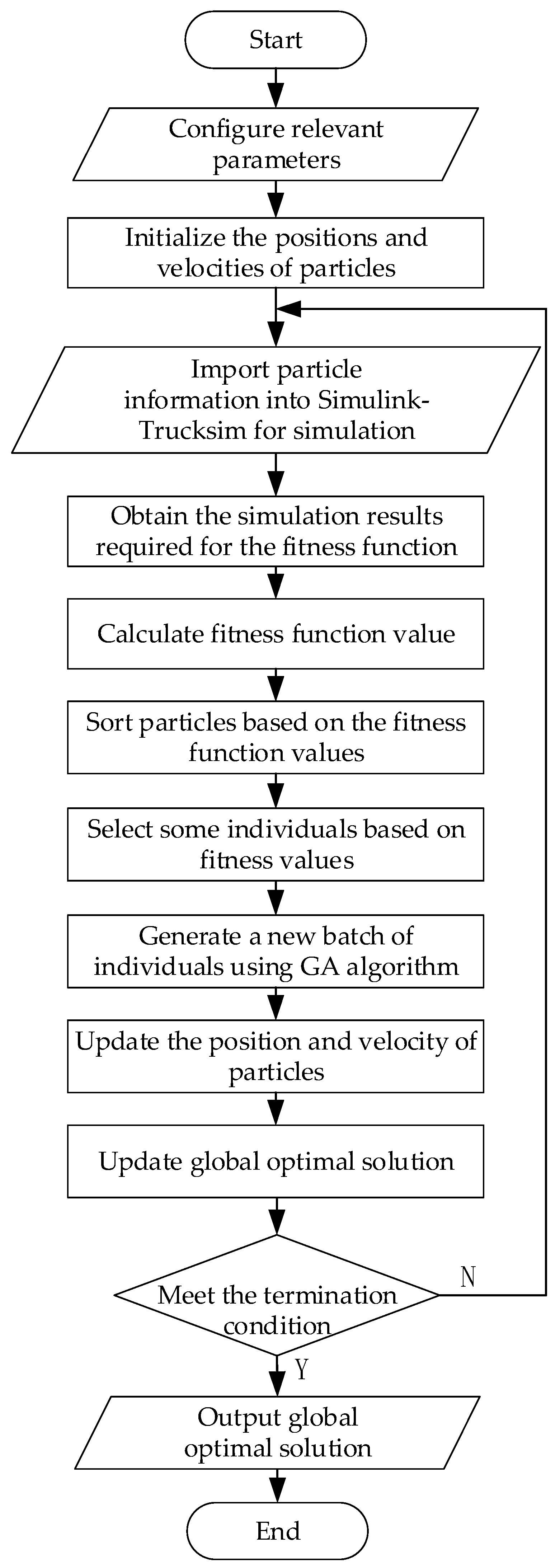
3.3. Optimization of Controller Parameters Based on GA-PSO Algorithm
- (1)
- First, configure the relevant parameters. The specific configuration parameters are as follows: Particle Upper and Lower Limit Range; Population Size; Max Iterations; Mutation Probability; Crossover Probability; Inertia Weight of PSO; Cognitive Learning Factor of PSO; Social Learning Factor of PSO; Max Velocity of PSO.
- (2)
- Initialize the particle positions and velocities within the given value range.
- (3)
- Input the parameter information of each particle into the Simulink-TruckSim joint simulation program to obtain the values required for fitness function calculations.
- (4)
- Calculate the fitness function value for each particle and sort them based on the fitness function value.
- (5)
- Select a subset of particles with lower fitness function values and generate a new batch of individuals through GA cross-mutation operations.
- (6)
- Update the particle velocities and positions using the PSO velocity and position updating formulas, and simultaneously update the global best solution.
- (7)
- Determine whether the termination condition is met. If it is met, output the global best solution; otherwise, continue with Step (3) to Step (7) in a loop.
3.4. Design of Lower Layer Torque Distribution Controller
3.4.1. Longitudinal PID Speed Controller
3.4.2. Objective Function
3.4.3. Constraint Condition
3.4.4. Optimization Problem Solving
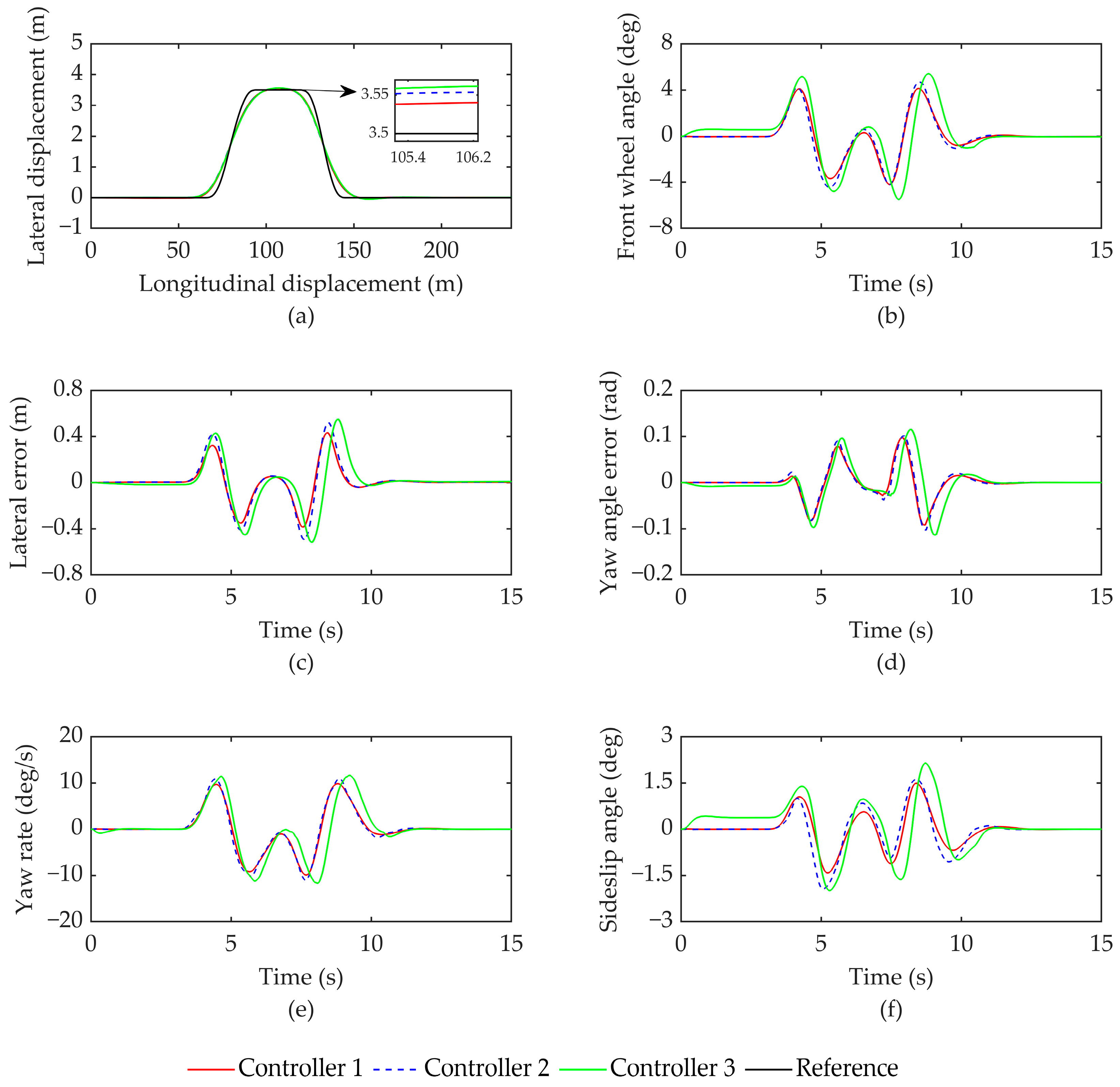
4. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nascimento, A.M.; Vismari, L.F.; Molina, C.B.S.T.; Cugnasca, P.S.; Camargo, J.B.; Almeida, J.R.; de Inam, R.; Fersman, E.; Marquezini, M.V.; Hata, A.Y. A Systematic Literature Review About the Impact of Artificial Intelligence on Autonomous Vehicle Safety. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4928–4946. [Google Scholar] [CrossRef]
- Yang, H.; Zheng, C.; Zhao, Y.; Wu, Z. Integrating the Intelligent Driver Model With the Action Point Paradigm to Enhance the Performance of Autonomous Driving. IEEE Access 2020, 8, 106284–106295. [Google Scholar] [CrossRef]
- Cao, M.; Li, V.O.K.; Shuai, Q. DeepGAL: Intelligent Vehicle Control for Traffic Congestion Alleviation at Intersections. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6836–6848. [Google Scholar] [CrossRef]
- Guo, N.; Zhang, X.; Zou, Y.; Lenzo, B.; Zhang, T. A Computationally Efficient Path-Following Control Strategy of Autonomous Electric Vehicles With Yaw Motion Stabilization. IEEE Trans. Transp. Electrif. 2020, 6, 728–739. [Google Scholar] [CrossRef]
- An, X.; Cai, B.; Shangguan, W. Research on Industry Development and Key Technologies of Vehicle Infrastructure Cooperative Autonomous Driving. In Proceedings of the Sixth International Conference on Traffic Engineering and Transportation System (ICTETS 2022), Guangzhou, China, 16 February 2023; SPIE: Bellingham, DC, USA, 2023; Volume 12591, pp. 669–677. [Google Scholar]
- Huang, Y.; Ding, H.; Zhang, Y.; Wang, H.; Cao, D.; Xu, N.; Hu, C. A Motion Planning and Tracking Framework for Autonomous Vehicles Based on Artificial Potential Field Elaborated Resistance Network Approach. IEEE Trans. Ind. Electron. 2020, 67, 1376–1386. [Google Scholar] [CrossRef]
- Yao, J.; Ge, Z. Path-Tracking Control Strategy of Unmanned Vehicle Based on DDPG Algorithm. Sensors 2022, 22, 7881. [Google Scholar] [CrossRef]
- Chen, J.; Shuai, Z.; Zhang, H.; Zhao, W. Path Following Control of Autonomous Four-Wheel-Independent-Drive Electric Vehicles via Second-Order Sliding Mode and Nonlinear Disturbance Observer Techniques. IEEE Trans. Ind. Electron. 2021, 68, 2460–2469. [Google Scholar] [CrossRef]
- Liang, Y.; Li, Y.; Khajepour, A.; Zheng, L. Holistic Adaptive Multi-Model Predictive Control for the Path Following of 4WID Autonomous Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 69–81. [Google Scholar] [CrossRef]
- Deng, X.; Sun, H.; Lu, Z.; Cheng, Z.; An, Y.; Chen, H. Research on Dynamic Analysis and Experimental Study of the Distributed Drive Electric Tractor. Agriculture 2023, 13, 40. [Google Scholar] [CrossRef]
- Tian, J.; Wang, Q.; Ding, J.; Wang, Y.; Ma, Z. Integrated Control With DYC and DSS for 4WID Electric Vehicles. IEEE Access 2019, 7, 124077–124086. [Google Scholar] [CrossRef]
- Wang, W.; Ma, T.; Yang, C.; Zhang, Y.; Li, Y.; Qie, T. A Path Following Lateral Control Scheme for Four-Wheel Independent Drive Autonomous Vehicle Using Sliding Mode Prediction Control. IEEE Trans. Transp. Electrif. 2022, 8, 3192–3207. [Google Scholar] [CrossRef]
- Rupp, A.; Stolz, M. Survey on Control Schemes for Automated Driving on Highways. In Automated Driving: Safer and More Efficient Future Driving; Watzenig, D., Horn, M., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 43–69. ISBN 978-3-319-31895-0. [Google Scholar]
- Cheng, Z.; Lu, Z. Research on Load Disturbance Based Variable Speed PID Control and a Novel Denoising Method Based Effect Evaluation of HST for Agricultural Machinery. Agriculture 2021, 11, 960. [Google Scholar] [CrossRef]
- Tan, Y.; Wen, B.; Jiao, C.; Su, X.; Xue, F. Trajectory Tracking Control of Differential Steering Mobile Robot Based on Fuzzy Logic under Time Constraints. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 5225–5229. [Google Scholar]
- Wu, Y.; Wang, L.; Zhang, J.; Li, F. Path Following Control of Autonomous Ground Vehicle Based on Nonsingular Terminal Sliding Mode and Active Disturbance Rejection Control. IEEE Trans. Veh. Technol. 2019, 68, 6379–6390. [Google Scholar] [CrossRef]
- Tian, J.; Yang, M. Research on Trajectory Tracking and Body Attitude Control of Autonomous Ground Vehicle Based on Differential Steering. PLoS ONE 2023, 18, e0273255. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, A.-T.; Sentouh, C.; Zhang, H.; Popieul, J.-C. Fuzzy Static Output Feedback Control for Path Following of Autonomous Vehicles with Transient Performance Improvements. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3069–3079. [Google Scholar] [CrossRef]
- Li, B. Unbalanced Vibration Control of Active Magnetic Bearing Using an Active Disturbance Rejection Notch Decoupling Technique. J. Vib. Control 2023, 107754632311564. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, J.; Yang, J.; Du, R.; Hai, Z.; Deng, H. Research on Path Tracking Control of Unmanned Vehicle. J. Phys. Conf. Ser. 2023, 2480, 012002. [Google Scholar] [CrossRef]
- Saleem, O.; Iqbal, J. Fuzzy-Immune-Regulated Adaptive Degree-of-Stability LQR for a Self-Balancing Robotic Mechanism: Design and HIL Realization. IEEE Robot. Autom. Lett. 2023, 8, 4577–4584. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, C.; Guo, F.; Shao, Y. Research on Path Following Control Method of Agricultural Machinery Autonomous Navigation through LQR-Feed Forward Control. In Proceedings of the 2021 IEEE International Conference on Data Science and Computer Application (ICDSCA), Dalian, China, 29–31 October 2021; pp. 228–233. [Google Scholar]
- Li, H.; Li, P.; Yang, L.; Zou, J.; Li, Q. Safety Research on Stabilization of Autonomous Vehicles Based on Improved-LQR Control. AIP Adv. 2022, 12, 015313. [Google Scholar] [CrossRef]
- Xu, S.; Peng, H. Design, Analysis, and Experiments of Preview Path Tracking Control for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 48–58. [Google Scholar] [CrossRef]
- Kapania, N.R.; Gerdes, J.C. Design of a Feedback-Feedforward Steering Controller for Accurate Path Tracking and Stability at the Limits of Handling. Veh. Syst. Dyn. 2015, 53, 1687–1704. [Google Scholar] [CrossRef]
- Ni, J.; Wang, Y.; Li, H.; Du, H. Path Tracking Motion Control Method of Tracked Robot Based on Improved LQR Control. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; pp. 2888–2893. [Google Scholar]
- Wang, Z.; Sun, K.; Ma, S.; Sun, L.; Gao, W.; Dong, Z. Improved Linear Quadratic Regulator Lateral Path Tracking Approach Based on a Real-Time Updated Algorithm with Fuzzy Control and Cosine Similarity for Autonomous Vehicles. Electronics 2022, 11, 3703. [Google Scholar] [CrossRef]
- Lu, A.; Lu, Z.; Li, R.; Tian, G. Adaptive LQR Path Tracking Control for 4WS Electric Vehicles Based on Genetic Algorithm. In Proceedings of the 2022 6th CAA International Conference on Vehicular Control and Intelligence (CVCI), Nanjing, China, 28–30 October 2022; pp. 1–6. [Google Scholar]
- Lei, T.; Gu, X.; Zhang, K.; Li, X.; Wang, J. PSO-Based Variable Parameter Linear Quadratic Regulator for Articulated Vehicles Snaking Oscillation Yaw Motion Control. Actuators 2022, 11, 337. [Google Scholar] [CrossRef]
- Hashemi, E.; Jalali, M.; Khajepour, A.; Kasaiezadeh, A.; Chen, S. Vehicle Stability Control: Model Predictive Approach and Combined-Slip Effect. IEEEASME Trans. Mechatron. 2020, 25, 2789–2800. [Google Scholar] [CrossRef]
- Liang, Y.; Li, Y.; Yu, Y.; Zheng, L. Integrated Lateral Control for 4WID/4WIS Vehicle in High-Speed Condition Considering the Magnitude of Steering. Veh. Syst. Dyn. 2020, 58, 1711–1735. [Google Scholar] [CrossRef]
- Lin, C.; Liang, S.; Gong, X.; Wang, B. Coordinated Yaw Stability Control for Extreme Path Tracking of 4WIDEVs Based on Predictive Control. Proc. Inst. Mech. Eng. Part J. Automob. Eng. 2023, 237, 1929–1946. [Google Scholar] [CrossRef]
- Chatzikomis, C.; Sorniotti, A.; Gruber, P.; Zanchetta, M.; Willans, D.; Balcombe, B. Comparison of Path Tracking and Torque-Vectoring Controllers for Autonomous Electric Vehicles. IEEE Trans. Intell. Veh. 2018, 3, 559–570. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, L.; Li, Y.; Li, S.; Liang, Y. Cooperative Strategy of Trajectory Tracking and Stability Control for 4WID Autonomous Vehicles Under Extreme Conditions. IEEE Trans. Veh. Technol. 2023, 72, 3105–3118. [Google Scholar] [CrossRef]
- Hu, C.; Wang, R.; Yan, F.; Chen, N. Output Constraint Control on Path Following of Four-Wheel Independently Actuated Autonomous Ground Vehicles. IEEE Trans. Veh. Technol. 2016, 65, 4033–4043. [Google Scholar] [CrossRef]
- Zou, Y.; Guo, N.; Zhang, X. An Integrated Control Strategy of Path Following and Lateral Motion Stabilization for Autonomous Distributed Drive Electric Vehicles. Proc. Inst. Mech. Eng. Part J. Automob. Eng. 2021, 235, 1164–1179. [Google Scholar] [CrossRef]
- Xie, J.; Xu, X.; Wang, F.; Tang, Z.; Chen, L. Coordinated Control Based Path Following of Distributed Drive Autonomous Electric Vehicles with Yaw-Moment Control. Control Eng. Pract. 2021, 106, 104659. [Google Scholar] [CrossRef]
- Sun, H.; Li, J.; Wang, R.; Yang, K. Attitude Control of the Quadrotor UAV with Mismatched Disturbances Based on the Fractional-Order Sliding Mode and Backstepping Control Subject to Actuator Faults. Fractal Fract. 2023, 7, 227. [Google Scholar] [CrossRef]
- Chan, J.C.L.; Lee, T.H. Sliding Mode Observer-Based Fault-Tolerant Secondary Control of Microgrids. Electronics 2020, 9, 1417. [Google Scholar] [CrossRef]
- Gudey, S.K.; Malla, M.; Jasthi, K.; Gampa, S.R. Direct Torque Control of an Induction Motor Using Fractional-Order Sliding Mode Control Technique for Quick Response and Reduced Torque Ripple. World Electr. Veh. J. 2023, 14, 137. [Google Scholar] [CrossRef]
- Talebi, J.; Ganjefar, S. Fractional Order Sliding Mode Controller Design for Large Scale Variable Speed Wind Turbine for Power Optimization. Environ. Prog. Sustain. Energy 2018, 37, 2124–2131. [Google Scholar] [CrossRef]
- Al-Dhaifallah, M.; Al-Qahtani, F.M.; Elferik, S.; Saif, A.-W.A. Quadrotor Robust Fractional-Order Sliding Mode Control in Unmanned Aerial Vehicles for Eliminating External Disturbances. Aerospace 2023, 10, 665. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; ISBN 978-1-4614-1432-2. [Google Scholar]
- Tong, Y.; Jing, H.; Kuang, B.; Wang, G.; Liu, F.; Yang, Z. Trajectory Tracking Control for Four-Wheel Independently Driven Electric Vehicle Based on Model Predictive Control and Sliding Model Control. In Proceedings of the 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 29–31 October 2021; pp. 1–5. [Google Scholar]
- Li, S.; Wang, X.; Cui, G.; Lu, X.; Zhang, B. Yaw and Lateral Stability Control Based on Predicted Trend of Stable State of the Vehicle. Veh. Syst. Dyn. 2023, 61, 111–127. [Google Scholar] [CrossRef]
- Hou, Y.; Xu, X. High-Speed Lateral Stability and Trajectory Tracking Performance for a Tractor-Semitrailer with Active Trailer Steering. PLoS ONE 2022, 17, e0277358. [Google Scholar] [CrossRef]
- Afifa, R.; Ali, S.; Pervaiz, M.; Iqbal, J. Adaptive Backstepping Integral Sliding Mode Control of a MIMO Separately Excited DC Motor. Robotics 2023, 12, 105. [Google Scholar] [CrossRef]
- Cheng, Z.; Chen, Y.; Li, W.; Liu, J.; Li, L.; Zhou, P.; Chang, W.; Lu, Z. Full Factorial Simulation Test Analysis and I-GA Based Piecewise Model Comparison for Efficiency Characteristics of Hydro Mechanical CVT. Machines 2022, 10, 358. [Google Scholar] [CrossRef]
- Li, Y.; Ma, Z.; Zheng, M.; Li, D.; Lu, Z.; Xu, B. Performance Analysis and Optimization of a High-Temperature PEMFC Vehicle Based on Particle Swarm Optimization Algorithm. Membranes 2021, 11, 691. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Zhang, J.; Li, L.; Wang, X.; Zhang, B.; Ping, X. Coordination Control of Maneuverability and Stability for Four-Wheel-Independent-Drive EV Considering Tire Sideslip. IEEE Trans. Transp. Electrif. 2022, 8, 3111–3126. [Google Scholar] [CrossRef]
- Mehmood, Y.; Aslam, J.; Ullah, N.; Alsheikhy, A.A.; Din, E.U.; Iqbal, J. Robust Fuzzy Sliding Mode Controller for a Skid-Steered Vehicle Subjected to Friction Variations. PLoS ONE 2021, 16, e0258909. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Units | Symbol | Value |
|---|---|---|---|
| Vehicle mass | Kg | 5760 | |
| Distance from the center of mass to the front axis | mm | 1250 | |
| Distance from the center of mass to the rear axis | mm | 3750 | |
| Moment of inertia | Kg·m2 | 35,402.8 | |
| Front axle cornering stiffness | N/rad | −322,450 | |
| Rear axle cornering stiffness | N/rad | −330,030 | |
| Wheelbase of the front axle | mm | 2030 | |
| Wheelbase of the rear axle | mm | 1863 | |
| Height of the center of mass | mm | 1175 | |
| Effective radius of wheel | mm | 510 | |
| Maximum torque of vehicle drive motor | N·m | 800 |
| Working Condition | Reference Path | Tire–Road Friction Coefficient | Longitudinal Vehicle Speed |
|---|---|---|---|
| 1 | Double Lane Change | 0.8 | 90 km/h |
| 2 | Double Lane Change | 0.4 | 60 km/h |
| 3 | Serpentine | 0.6 | 60 km/h |
| 4 | U-shaped | 0.4 | 40 km/h |
| Controller | Lateral Error (m) | Yaw Error (rad) | Yaw Rate (deg/s) | Sideslip Angle (deg) | ||||
|---|---|---|---|---|---|---|---|---|
| Max (abs) | RMS | Max (abs) | RMS | Max (abs) | RMS | Max (abs) | RMS | |
| 1 | 0.4353 | 0.1351 | 0.0978 | 0.0303 | 9.9031 | 4.1593 | 1.4905 | 0.5294 |
| 2 | 0.5224 | 0.1663 | 0.1033 | 0.0322 | 10.9972 | 4.4138 | 1.9316 | 0.6331 |
| 3 | 0.5518 | 0.1805 | 0.1161 | 0.0370 | 11.6401 | 4.8989 | 2.1444 | 0.8032 |
| Controller | Lateral Error (m) | Yaw Error (rad) | Yaw Rate (deg/s) | Sideslip Angle (deg) | ||||
|---|---|---|---|---|---|---|---|---|
| Max (abs) | RMS | Max (abs) | RMS | Max (abs) | RMS | Max (abs) | RMS | |
| 1 | 0.7211 | 0.2244 | 0.0996 | 0.0351 | 10.6126 | 5.0915 | 1.6560 | 0.7197 |
| 2 | 0.8282 | 0.2687 | 0.1126 | 0.0417 | 11.5930 | 5.7655 | 2.1197 | 0.8911 |
| 3 | 0.8903 | 0.3076 | 0.1167 | 0.0437 | 12.9965 | 6.1480 | 2.3285 | 1.0518 |
| Controller | Lateral Error (m) | Yaw Error (rad) | Yaw Rate (deg/s) | Sideslip Angle (deg) | ||||
|---|---|---|---|---|---|---|---|---|
| Max (abs) | RMS | Max (abs) | RMS | Max (abs) | RMS | Max (abs) | RMS | |
| 1 | 0.3791 | 0.1374 | 0.2251 | 0.0525 | 19.5200 | 12.0581 | 3.0144 | 1.2756 |
| 2 | 0.4340 | 0.1544 | 0.2349 | 0.0624 | 21.6897 | 13.1355 | 3.8459 | 1.4340 |
| 3 | 0.4561 | 0.1859 | 0.2954 | 0.0660 | 23.7043 | 13.8848 | 4.0700 | 2.1310 |
| Controller | Lateral Error (m) | Yaw Error (rad) | Yaw Rate (deg/s) | Sideslip Angle (deg) | ||||
|---|---|---|---|---|---|---|---|---|
| Max (abs) | RMS | Max (abs) | RMS | Max (abs) | RMS | Max (abs) | RMS | |
| 1 | 0.2329 | 0.1223 | 0.0919 | 0.0584 | 11.5801 | 8.4870 | 1.8646 | 1.3744 |
| 2 | 0.3092 | 0.1610 | 0.1124 | 0.0705 | 12.8955 | 9.3652 | 2.3421 | 1.4453 |
| 3 | 0.3309 | 0.1825 | 0.1460 | 0.0954 | 13.3003 | 9.7098 | 2.6273 | 1.8877 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, F.; Zhao, F.; Zhang, Y. Research on Path Tracking and Yaw Stability Coordination Control Strategy for Four-Wheel Independent Drive Electric Trucks. Processes 2023, 11, 2473. https://doi.org/10.3390/pr11082473
Gao F, Zhao F, Zhang Y. Research on Path Tracking and Yaw Stability Coordination Control Strategy for Four-Wheel Independent Drive Electric Trucks. Processes. 2023; 11(8):2473. https://doi.org/10.3390/pr11082473
Chicago/Turabian StyleGao, Feng, Fengkui Zhao, and Yong Zhang. 2023. "Research on Path Tracking and Yaw Stability Coordination Control Strategy for Four-Wheel Independent Drive Electric Trucks" Processes 11, no. 8: 2473. https://doi.org/10.3390/pr11082473
APA StyleGao, F., Zhao, F., & Zhang, Y. (2023). Research on Path Tracking and Yaw Stability Coordination Control Strategy for Four-Wheel Independent Drive Electric Trucks. Processes, 11(8), 2473. https://doi.org/10.3390/pr11082473