

Hybrid Dynamical Modeling and Control of Permanent Magnet Synchronous Motors: Hardware-in-the-Loop Verification




Abstract
:1. Introduction
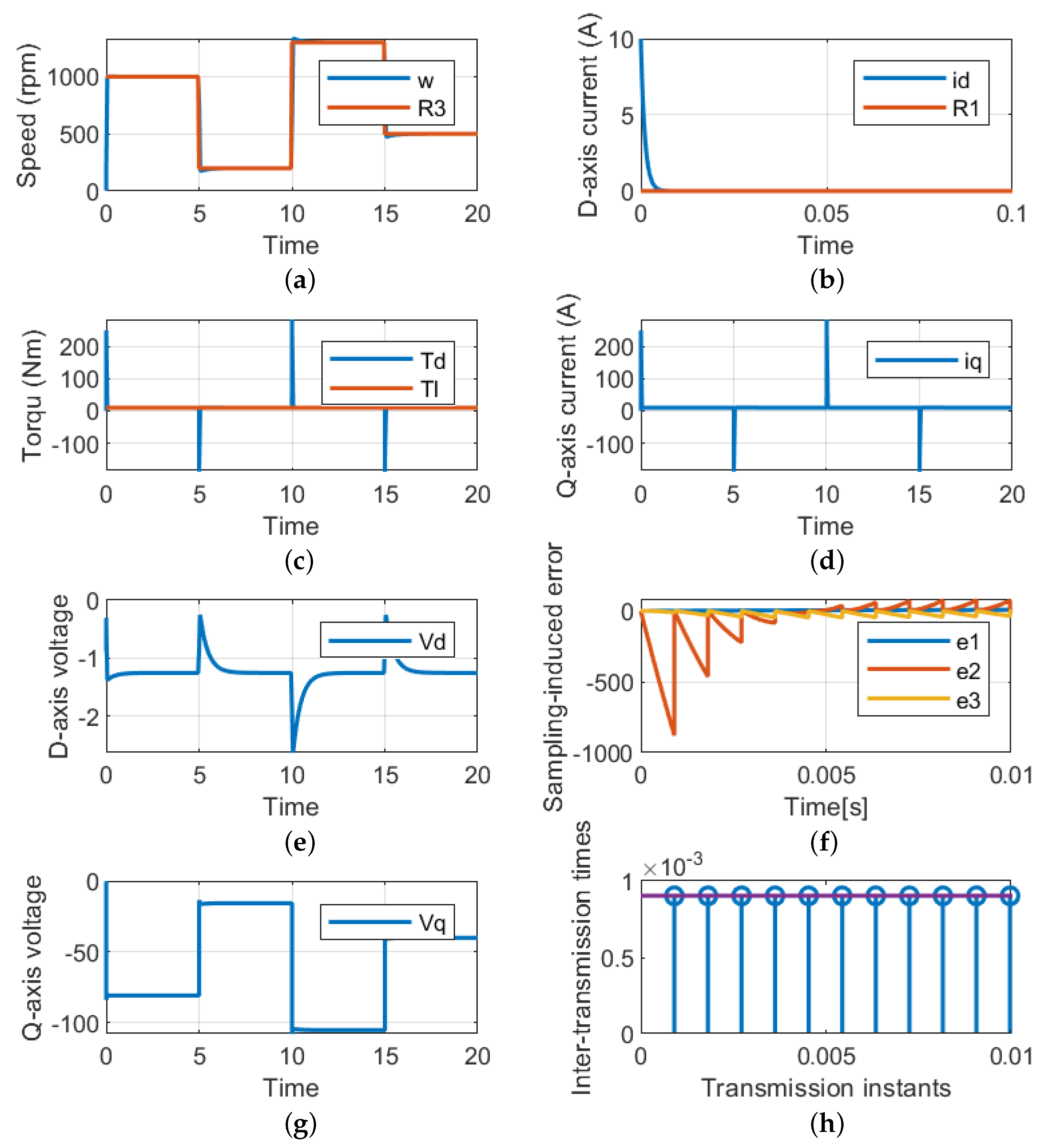
- Constant speed with variable load torque: The reference speed trajectory is fixed while the torque disturbance varies along the simulation time window;
- Variable speed with constant load torque: The load disturbance is fixed while different step references for motor speed are given;
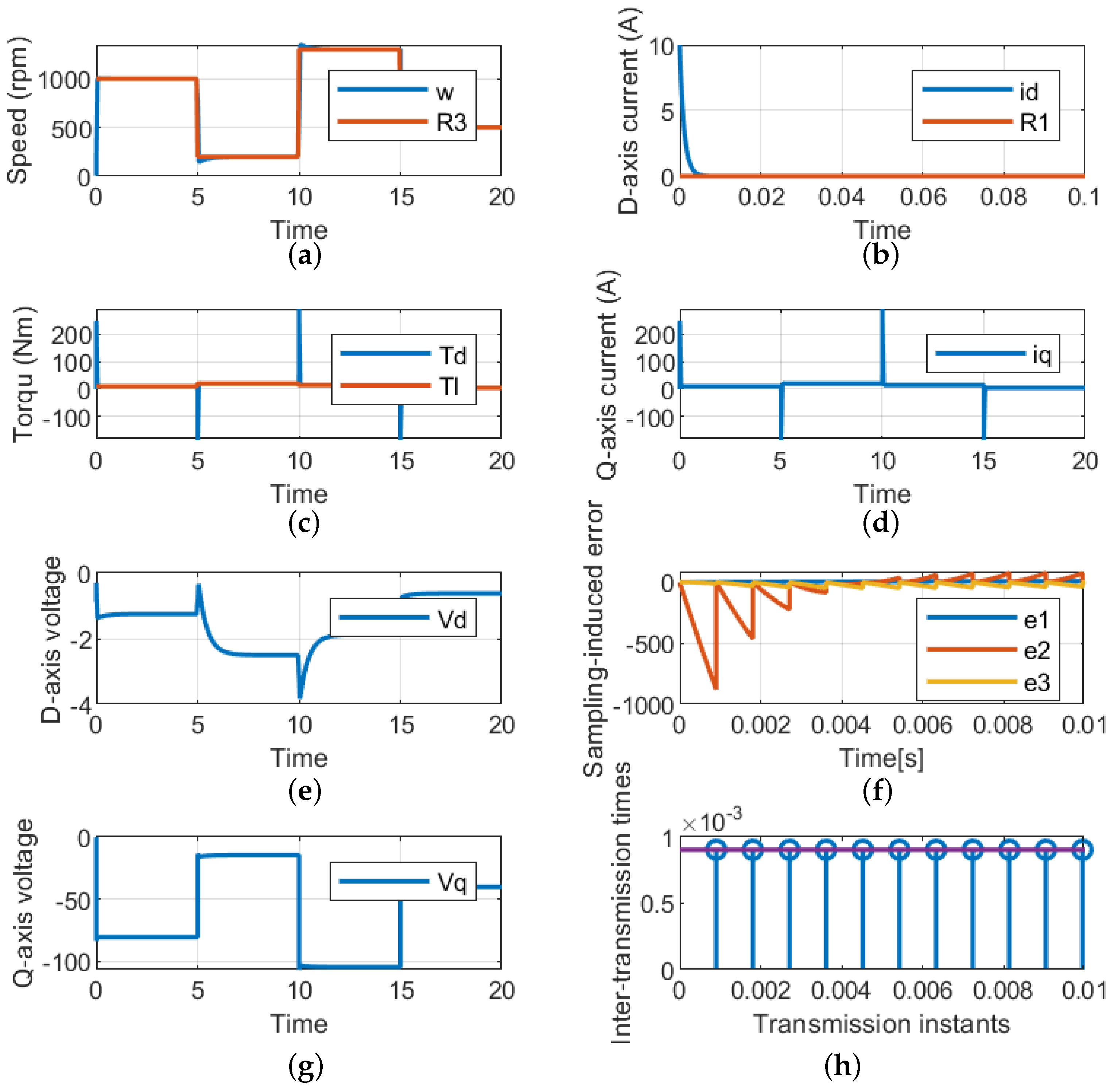
- Variable speed with variable load torque: The above two cases are combined in this implementation.
- An optimal nonlinear control method is proposed for PMSM, which is robust against load disturbances;
- The minimum stabilizing sampling frequency is derived for the sampled- data implementation;
- The overall drive system modeling is formulated as a hybrid dynamical system to deal with discrete-time and continuous-time behaviors.
2. Notation and Preliminaries
3. Problem Formulation
- The controlled output y tracks the desired reference trajectories of the current (state ) and the angular speed w (state );
- The system is robust against variable external disturbances of the load torque T.
4. Control Design
5. Hybrid Dynamical System
- (i)
- for all
- (ii)
- for almost all and all
- (iii)
- for almost all and all
6. Simulation
7. Results and Discussions
7.1. Closed Loop of Variable Speed and Constant Load Torque
7.2. Closed Loop of Constant Speed and Variable Load Torque
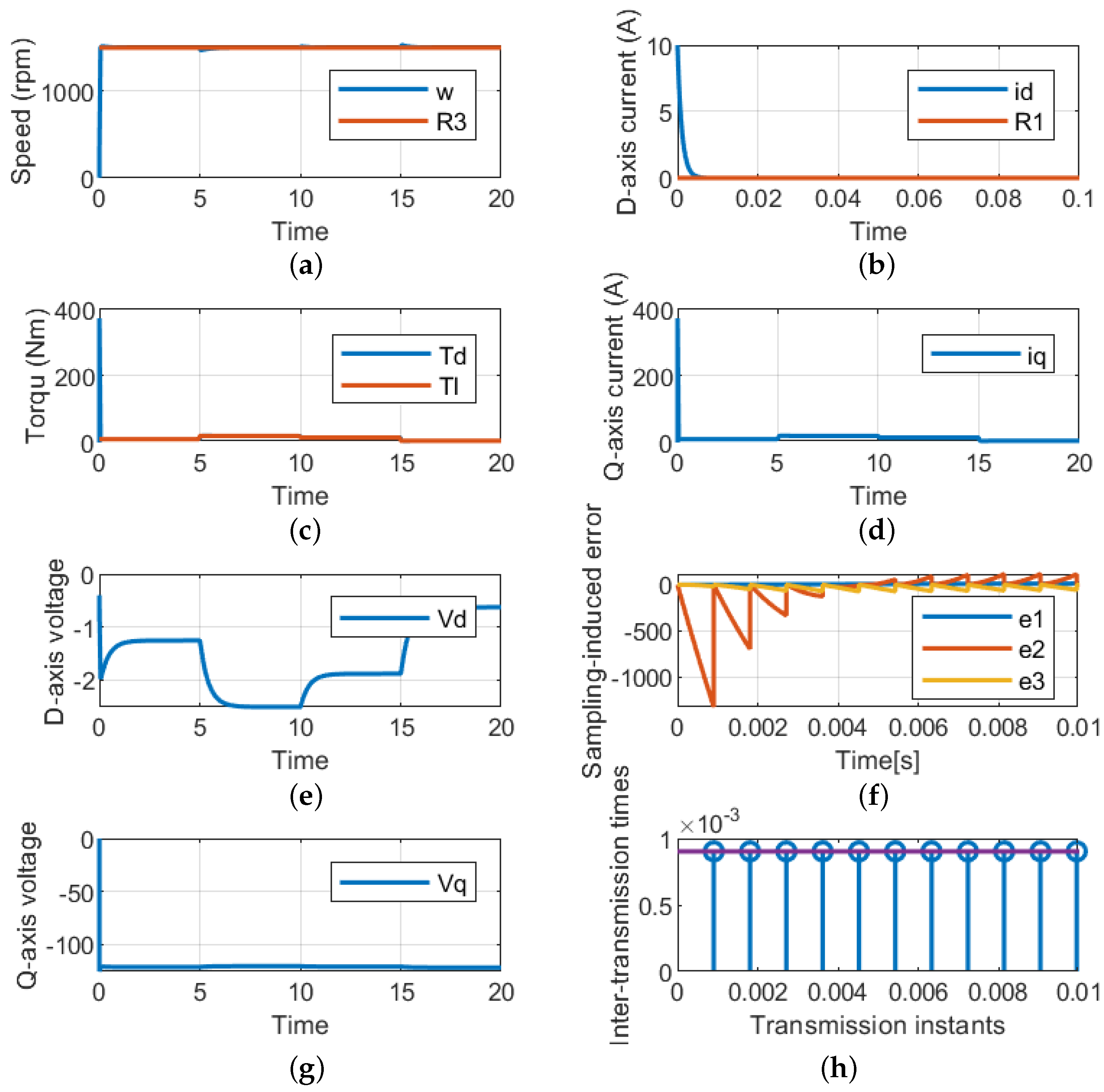
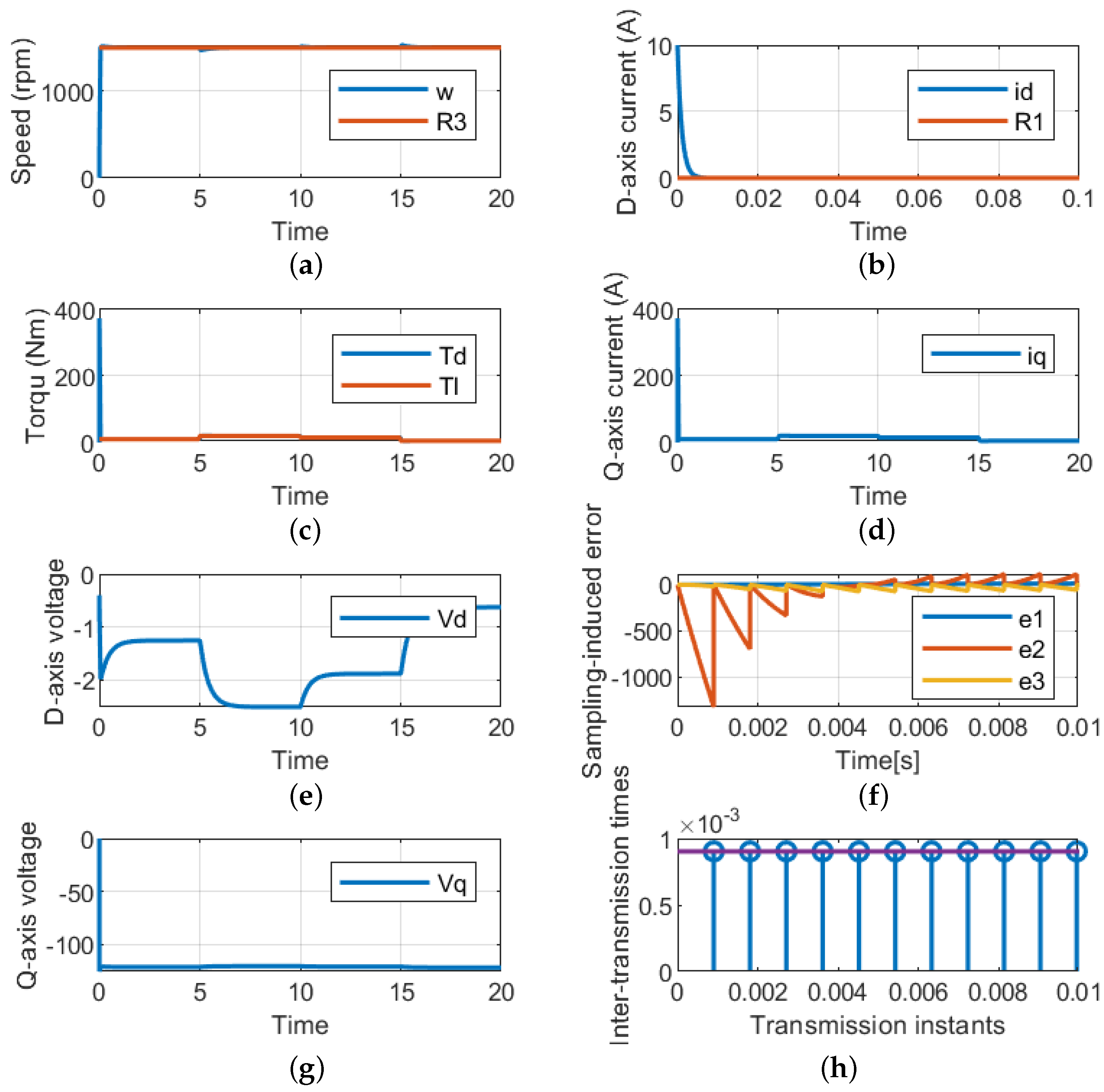
7.3. Closed Loop of Variable Speed and Variable Load Torque
7.4. Simulation Comparison
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Adib, A.; Afridi, K.K.; Amirabadi, M.; Fateh, F.; Ferdowsi, M.; Lehman, B.; Lewis, L.H.; Mirafzal, B.; Saeedifard, M.; Shadmand, M.B.; et al. E-Mobility-Advancements and Challenges. IEEE Access 2019, 7, 165226–165240. [Google Scholar] [CrossRef]
- Sanguesa, J.; Torres-Sanz, V.; Garrido, P.; Martinez, F.; Marquez-Barja, J. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Kumar, R.; Pachauri, R.; Badoni, P.; Bharadwaj, D.; Mittal, U.; Bisht, A. Investigation on parallel hybrid electric bicycle along with issuer management system for mountainous region. J. Clean. Prod. 2022, 362, 132430. [Google Scholar] [CrossRef]
- Kumar, R.; Ahuja, R.; Saxena, M.; Kumar, A. Automotive Power Window Communication with DTC Algorithm and Hardware-in-the Loop Testing. Wirel. Pers. Commun. 2020, 114, 3351–3366. [Google Scholar] [CrossRef]
- El-Refaie, A.M. Motors/generators for traction/propulsion applications: A review. IEEE Veh. Technol. Mag. 2013, 8, 90–99. [Google Scholar] [CrossRef]
- Liao, G.; Zhang, W.; Cai, C. Research on a PMSM control strategy for electric vehicles. Adv. Mech. Eng. 2021, 13, 16878140211051462. [Google Scholar] [CrossRef]
- Maroti, P.K.; Padmanaban, S.; Bhaskar, M.S.; Ramachandaramurthy, V.K.; Blaabjerg, F. The state-of-the-art of power electronics converters configurations in electric vehicle technologies. Power Electron. Devices Components 2022, 1, 100001. [Google Scholar] [CrossRef]
- Rangarajan, S.S.; Sunddararaj, S.P.; Sudhakar, A.; Shiva, C.K.; Subramaniam, U.; Collins, E.R.; Senjyu, T. Lithium-Ion Batterie-The Crux of Electric Vehicles with Opportunities and Challenges. Clean Technol. 2022, 4, 908–930. [Google Scholar] [CrossRef]
- Lee, K.; Ahmed, S.; Lukic, S.M. Universal Restart Strategy for High-Inertia Scalar-Controlled PMSM Drives. IEEE Trans. Ind. Appl. 2016, 52, 4001–4009. [Google Scholar] [CrossRef]
- Rachev, E.; Petrov, V. Reducing the transient in switching from scalar to field oriented control for smooth ramp start of a permanent magnet synchronous motor. In Proceedings of the 2019 11th Electrical Engineering Faculty Conference (BulEF), Varna, Bulgaria, 11–14 September 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Subramaniam, U.; Reddy, K.S.; Kaliyaperumal, D.; Sailaja, V.; Bhargavi, P.; Likhith, S. A MIMO-ANFIS-Controlled Solar-Fuel-Cell-Based Switched Capacitor Z-Source Converter for an Off-Board EV Charger. Energies 2023, 16, 1693. [Google Scholar] [CrossRef]
- Alzayed, M.; Chaoui, H. Efficient Simplified Current Sensorless Dynamic Direct Voltage MTPA of Interior PMSM for Electric Vehicles Operation. IEEE Trans. Veh. Technol. 2022, 71, 12701–12710. [Google Scholar] [CrossRef]
- Tang, M.; Chen, Y.; Yang, T. Field Weakening Design for a High Speed Nine-phase Permanent Magnet Synchronous Machine in More Electric Aircraft. In Proceedings of the 2022 IEEE Transportation Electrification Conference & Expo (ITEC), Anaheim, CA, USA, 15–17 June 2022; pp. 1093–1096. [Google Scholar] [CrossRef]
- Koç, M. Unified Field Oriented Controlled Drive System for All Types of the PMSMs Considering System Nonlinearities. IEEE Access 2022, 10, 56773–56784. [Google Scholar] [CrossRef]
- Petkar, S.G.; Thippiripati, V.K. A Novel Duty Controlled DTC of a Surface PMSM Drive With Reduced Torque and Flux Ripples. IEEE Trans. Ind. Electron. 2022, 70, 3373–3383. [Google Scholar] [CrossRef]
- Sharkawy, A.; Othman, M.; Khalil, A. A robust fuzzy tracking control scheme for robotic manipulators with experimental verification. Intell. Control Autom. 2010, 2, 100–111. [Google Scholar] [CrossRef]
- Nasr, A.; Gu, C.; Wang, X.; Buticchi, G.; Bozhko, S.; Gerada, C. Torque-Performance Improvement for Direct Torque-Controlled PMSM Drives Based on Duty-Ratio Regulation. IEEE Trans. Power Electron. 2022, 37, 749–760. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Xu, Z.; Cheng, M.; Hu, Y. Optimization of Torque Tracking Performance for Direct-Torque-Controlled PMSM Drives With Composite Torque Regulator. IEEE Trans. Ind. Electron. 2020, 67, 10095–10108. [Google Scholar] [CrossRef]
- Niu, F.; Wang, B.; Babel, A.S.; Li, K.; Strangas, E.G. Comparative Evaluation of Direct Torque Control Strategies for Permanent Magnet Synchronous Machines. IEEE Trans. Power Electron. 2016, 31, 1408–1424. [Google Scholar] [CrossRef]
- Sain, C.; Banerjee, A.; Biswas, P.; Azar, A.; Babu, T.S. Design and optimisation of a fuzzy-PI controlled modified inverter-based PMSM drive employed in a light weight electric vehicle. Int. J. Autom. Control 2022, 16, 459. [Google Scholar] [CrossRef]
- Pilla, R.; Gorripotu, T.; Azar, A. Tuning of extended Kalman filter using grey wolf optimisation for speed control of permanent magnet synchronous motor drive. Int. J. Autom. Control 2021, 15, 563. [Google Scholar] [CrossRef]
- Abdelrahim, M.; Mabrok, M.A.; Darwish, M.A.H. Networked control design for an engine throttle valve system. Int. J. Control 2023, 96, 1736–1743. [Google Scholar] [CrossRef]
- Gu, M.; Yang, Y.; Fan, M.; Xiao, Y.; Liu, P.; Zhang, X.; Yang, H.; Rodriguez, J. Finite Control Set Model Predictive Torque Control with Reduced Computation Burden for PMSM Based on Discrete Space Vector Modulation. IEEE Trans. Energy Convers. 2022, 38, 703–712. [Google Scholar] [CrossRef]
- Elmorshedy, M.F.; Xu, W.; El-Sousy, F.F.M.; Islam, R.; Ahmed, A.A. Recent achievements in model predictive control techniques for industrial motor: A Comprehensive state-of-the-art. IEEE Access 2021, 9, 58170–58191. [Google Scholar] [CrossRef]
- Murali, A.; Wahab, R.; Gade, C.; Annamalai, C.; Subramaniam, U. Assessing Finite Control Set Model Predictive Speed Controlled PMSM Performance for Deployment in Electric Vehicles. World Electr. Veh. J. 2021, 12, 41. [Google Scholar] [CrossRef]
- Diab, A.; Yeoh, S.; Bozhko, S.; Gerada, C.; Galea, M. Enhanced Active Disturbance Rejection Current Controller for Permanent Magnet Synchronous Machines Operated at Low Sampling Time Ratio. IEEE J. Emerg. Sel. Top. Ind. Electron. 2022, 3, 230–241. [Google Scholar]
- Mishra, I.; Tripathi, R.; Hanamoto, T. Synchronization and Sampling Time Analysis of Feedback Loop for FPGA-Based PMSM Drive System. Electronics 2020, 9, 1906. [Google Scholar] [CrossRef]
- Sakthivel, R.; Santra, S.; Kaviarasan, B.; Park, J. Finite-time sampled-data control of permanent magnet synchronous motor systems. Nonlinear Dyn. 2016, 86, 2081–2092. [Google Scholar] [CrossRef]
- Yu, Y.; Shen, Y.; Liu, Y. Sampled-data based output tracking H∞ control for PMSM servo system. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 5521–5525. [Google Scholar]
- Khanchoul, M.; Hilairet, M.; Normand-Cyrot, D. IDA-PBC under sampling for torque control of the PMSM. IFAC Proc. Vol. 2013, 46, 15–20. [Google Scholar] [CrossRef]
- Vadivel, R.; Njitacke, Z.T.; Shanmugam, L.; Hammachukiattikul, P.; Gunasekaran, N. Dynamical analysis and reachable set estimation of T-S fuzzy system with permanent magnet synchronous motor. Commun. Nonlinear Sci. Numer. Simul. 2023, 125, 107407. [Google Scholar] [CrossRef]
- Dominguez, J.; Navarrete, A.; Meza, M.; Loukianov, A.G.; Canedo, J. Digital Sliding-Mode Sensorless Control for Surface-Mounted PMSM. IEEE Trans. Ind. Informatics 2014, 10, 137–151. [Google Scholar] [CrossRef]
- Rizvi, S.; Memon, A. An extended observer-based robust nonlinear speed sensorless controller for a PMSM. Int. J. Control 2019, 92, 2123–2135. [Google Scholar] [CrossRef]
- Carnevale, D.; Teel, A.; Nešić, D. A Lyapunov proof of an improved maximum allowable transfer interval for networked control systems. IEEE Trans. Autom. Control 2007, 52, 892–897. [Google Scholar]
- Nešić, D.; Teel, A.; Carnevale, D. Explicit Computation of the Sampling Period in Emulation of Controllers for Nonlinear Sampled-Data Systems. IEEE Trans. Autom. Control 2009, 54, 619–624. [Google Scholar] [CrossRef]
- Goebel, R.; Sanfelice, R.; Teel, A. Hybrid Dynamical Systems: Modeling, Stability, and Robustness; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Abdelrahim, M.; Postoyan, R.; Daafouz, J. Event-triggered control of nonlinear singularly perturbed systems based only on the slow dynamics. In Proceedings of the 9th IFAC Symposium on Nonlinear Control Systems The International Federation of Automatic Control, Toulouse, France, 4–6 September 2013; pp. 347–352. [Google Scholar]
- Abdelrahim, M.; Postoyan, R.; Daafouz, J.; Nešić, D. Event-triggered dynamic feedback controllers for nonlinear systems with asynchronous transmissions. In Proceedings of the 54th IEEE Conference on Decision and Control, Osaka, Japan, 15–18 December 2015; pp. 5494–5499. [Google Scholar]
- Jlassi, I.; Marques Cardoso, A.J. Enhanced and Computationally Efficient Model Predictive Flux and Power Control of PMSG Drives for Wind Turbine Applications. IEEE Trans. Ind. Electron. 2021, 68, 6574–6583. [Google Scholar] [CrossRef]
- Attaianese, C.; DÁrpino, M.; Monaco, M.D.; Di Noia, L.P. Modeling and Detection of Phase Current Sensor Gain Faults in PMSM Drives. IEEE Access 2022, 10, 80106–80118. [Google Scholar] [CrossRef]
- Elmorshedy, M.F.o. Improved Standalone PMSG based Wind-Generating System Using MPPT and MRAS for Speed Estimation. In Proceedings of the 2021 IEEE 4th International Conference on Computing, Power and Communication Technologies (GUCON), Kuala Lumpur, Malaysia, 24–26 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Bacha, S.; Munteanu, I.; Bratcu, A. Power Electronic Converters Modeling and Control. In Advanced Textbooks in Control and Signal Processing; Springer: London, UK, 2014; Volume 454. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Power | 1000 W |
| Number of phases | 3 |
| Maximum speed | 3000 rpm |
| Number of poles | 4 |
| Resistance | 0.0125 |
| Inductance | 0.1025 mH |
| Inertia | 0.0045 NMs |
| Coefficient of friction | 0.0021 Nm s rad |
| Back emf | 0.025 V s rad |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elmorshedy, M.F.; Almakhles, D.; Abdelrahim, M. Hybrid Dynamical Modeling and Control of Permanent Magnet Synchronous Motors: Hardware-in-the-Loop Verification. Processes 2023, 11, 2370. https://doi.org/10.3390/pr11082370
Elmorshedy MF, Almakhles D, Abdelrahim M. Hybrid Dynamical Modeling and Control of Permanent Magnet Synchronous Motors: Hardware-in-the-Loop Verification. Processes. 2023; 11(8):2370. https://doi.org/10.3390/pr11082370
Chicago/Turabian StyleElmorshedy, Mahmoud F., Dhafer Almakhles, and Mahmoud Abdelrahim. 2023. "Hybrid Dynamical Modeling and Control of Permanent Magnet Synchronous Motors: Hardware-in-the-Loop Verification" Processes 11, no. 8: 2370. https://doi.org/10.3390/pr11082370
APA StyleElmorshedy, M. F., Almakhles, D., & Abdelrahim, M. (2023). Hybrid Dynamical Modeling and Control of Permanent Magnet Synchronous Motors: Hardware-in-the-Loop Verification. Processes, 11(8), 2370. https://doi.org/10.3390/pr11082370