

Observer-Based Control of Inductive Wireless Power Transfer System Using Genetic Algorithm



Abstract
1. Introduction
- A novel design methodology for a bidirectional inductive power transfer system is proposed based on eiegnstructure assignment and LQR methods;
- The parameters of the controller are optimized by using the genetic algorithm;
- The effectiveness of the approach is supported by a simulation comparison with manually tuned LQR.
2. Problem Formulation
3. Control Design
3.1. Eigenstructure Assignment
- is a linearly independent set in , the space of complex N-vectors;
- when , where the denotes the conjugate of given a (complex vector or scalar);
- .
3.2. Linear Quadratic Regulator
4. Simulation Results
4.1. Eigenstructure Assignment
4.2. Manually Tuned LQR
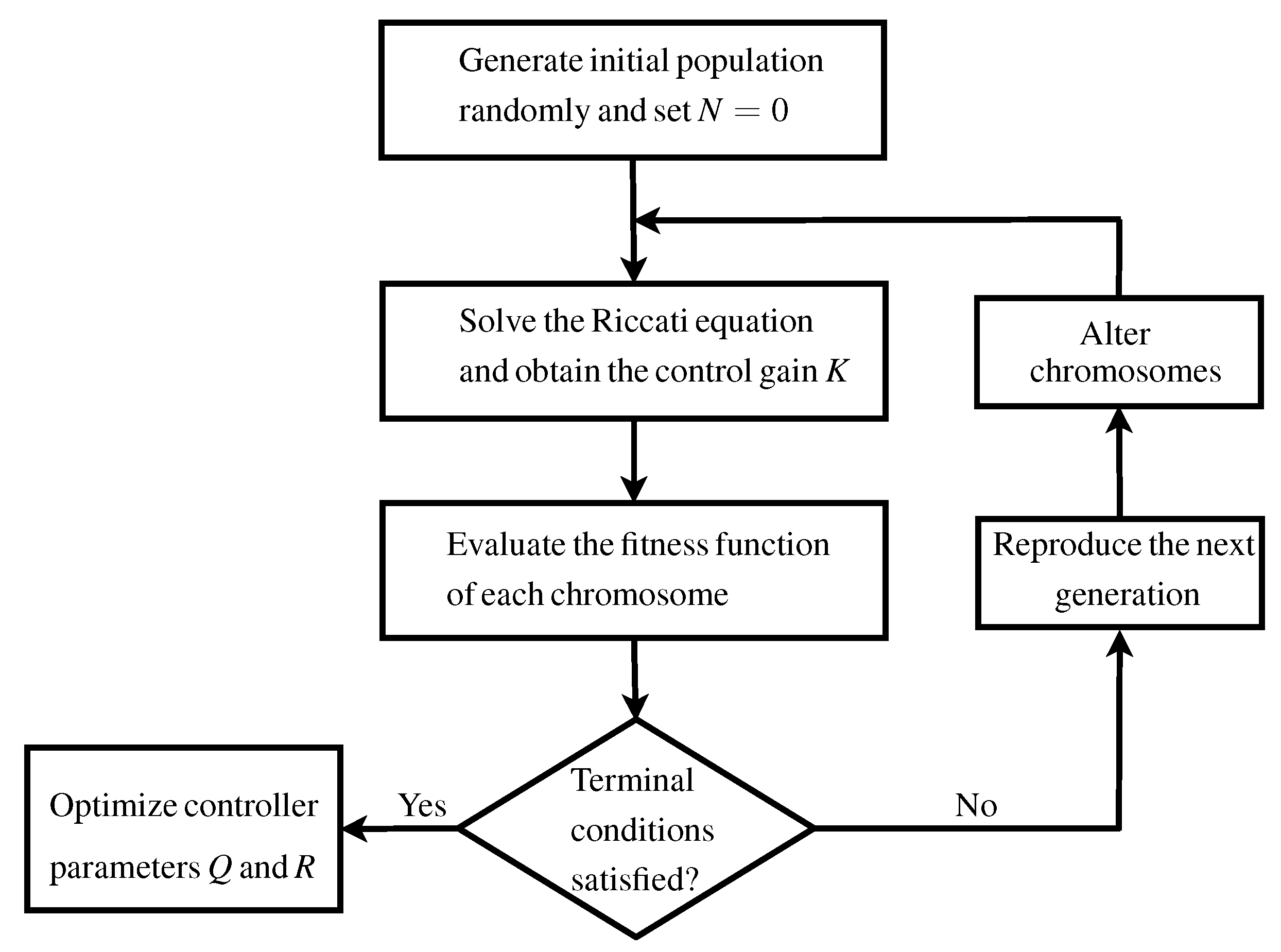
4.3. Automatic Tuning of LQR Based on Genetic Algorithm
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, X.; Li, Z.; Wang, X.; Li, C. Technology Development of Electric Vehicles: A Review. Energies 2020, 13, 90. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Franke, T.; Görges, D.; Arend, M. The Energy Interface Challenge. Towards Designing Effective Energy Efficiency Interfaces for Electric Vehicles. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Utrecht, The Netherlands, 21–25 September 2019; pp. 35–48. [Google Scholar]
- Pan, Z.; Shieh, S.Y.; Li, B. Battery State-of-Charge Pulse-and-Glide Strategy Development of Hybrid Electric Vehicles for VTS Motor Vehicle Challenge. In Proceedings of the 2018 IEEE Vehicle Power and Propulsion Conference (VPPC), Chicago, IL, USA, 27–30 August 2018; pp. 1–7. [Google Scholar]
- Rayan, B.A.; Subramaniam, U.; Balamurugan, S. Wireless Power Transfer in Electric Vehicles: A Review on Compensation Topologies, Coil Structures, and Safety Aspects. Energies 2023, 16, 3084. [Google Scholar] [CrossRef]
- El-Shahat, A.; Ayisire, E.; Wu, Y.; Rahman, M.; Nelms, D. Electric Vehicles Wireless Power Transfer State-of-The-Art. Energy Procedia 2019, 162, 24–37. [Google Scholar] [CrossRef]
- Amjad, M.; Farooq-i-Azam, M.F.; Ni, Q.; Dong, M.; Ansari, E.A. Wireless charging systems for electric vehicles. Renew. Sustain. Energy Rev. 2022, 167, 112730. [Google Scholar] [CrossRef]
- Li, S.; Mi, C.C. Wireless Power Transfer for Electric Vehicle Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar]
- Savari, G.F.; Sathik, M.J.; Raman, L.A.; El-Shahat, A.; Hasanien, H.M.; Almakhles, D.; Aleem, S.H.A.; Omar, A.I. Assessment of charging technologies, infrastructure and charging station recommendation schemes of electric vehicles: A review. Ain Shams Eng. J. 2023, 14, 101938. [Google Scholar] [CrossRef]
- Alkasir, A.; Abdollahi, S.E.; Abdollahi, S.R.; Wheeler, P. Enhancement of dynamic wireless power transfer system by model predictive control. IET Power Electron. 2022, 15, 67–79. [Google Scholar] [CrossRef]
- Hou, C.; Zhao, Q. Optimal Control of Wireless Powered Edge Computing System for Balance Between Computation Rate and Energy Harvested. IEEE Trans. Autom. Sci. Eng. 2023, 20, 1108–1124. [Google Scholar] [CrossRef]
- Solimene, L.; Corti, F.; Musumeci, S.; Ragusa, C.S.; Reatti, A. Magnetic Control of LCC-S Compensated Wireless Power Transfer System. In Proceedings of the 2022 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Sorrento, Italy, 22–24 June 2022; pp. 160–165. [Google Scholar] [CrossRef]
- Dai, X.; Hua, X.; Sun, S.; Sun, Y. Dynamic output feedback control for wireless power transfer systems. Asian J. Control 2023. [Google Scholar] [CrossRef]
- Deng, Q.; Li, Z.; Liu, J.; Li, S.; Luo, P.; Cui, K. Data-Driven Modeling and Control Considering Time Delays for WPT System. IEEE Trans. Power Electron. 2022, 37, 9923–9932. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, F.; Feng, H.; Zhang, G.; Wang, L.; Chi, R.; Li, K. Frequency tracking control of the WPT system based on fuzzy RBF neural network. Int. J. Intell. Syst. 2022, 37, 3881–3899. [Google Scholar] [CrossRef]
- Venkatesan, M.; Rajamanickam, N.; Vishnuram, P.; Bajaj, M.; Blazek, V.; Prokop, L.; Misak, S. A Review of Compensation Topologies and Control Techniques of Bidirectional Wireless Power Transfer Systems for Electric Vehicle Applications. Energies 2022, 15, 7816. [Google Scholar] [CrossRef]
- Ahn, D.; Kim, S.; Moon, J.; Cho, I.K. Wireless Power Transfer with Automatic Feedback Control of Load Resistance Transformation. IEEE Trans. Power Electron. 2016, 31, 7876–7886. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, L.; Liu, Z.; Chen, Q.; Long, R.; Su, H. Model Predictive Control for the Receiving-Side DC-DC Converter of Dynamic Wireless Power Transfer. IEEE Trans. Power Electron. 2020, 35, 8985–8997. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, X.; Dai, H. Design and Control of a 3 kW Wireless Power Transfer System for Electric Vehicles. Energies 2016, 9, 10. [Google Scholar] [CrossRef]
- Zhong, W.; Hui, S.Y.R. Charging Time Control of Wireless Power Transfer Systems without Using Mutual Coupling Information and Wireless Communication System. IEEE Trans. Ind. Electron. 2017, 64, 228–235. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, B.; Wu, L. Output Power Stabilization for Wireless Power Transfer System Employing Primary-Side-Only Control. IEEE Access 2020, 8, 63735–63747. [Google Scholar] [CrossRef]
- Wei, Z.; Zhang, B.; Shu, X.; Rong, C. A Wireless Power Transfer System with Hybrid Control for Constant Current and Voltage Output. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 6317–6331. [Google Scholar] [CrossRef]
- Gao, X.; Cao, W.; Yang, Q.; Wang, H.; Wang, X.; Jin, G.; Zhang, J. Parameter optimization of control system design for uncertain wireless power transfer systems using modified genetic algorithm. CAAI Trans. Intell. Technol. 2022, 7, 582–593. [Google Scholar] [CrossRef]
- Swain, A.K.; Neath, M.J.; Madawala, U.K.; Thrimawithana, D.J. A Dynamic Multivariable State-Space Model for Bidirectional Inductive Power Transfer Systems. IEEE Trans. Power Electron. 2012, 27, 4772–4780. [Google Scholar] [CrossRef]
- Rana, M.M.; Xiang, W.; Wang, E.; Li, X.; Choi, B.J. Internet of Things Infrastructure for Wireless Power Transfer Systems. IEEE Access 2018, 6, 19295–19303. [Google Scholar] [CrossRef]
- Swain, A.K.; Devarakonda, S.; Madawala, U.K. Modeling, Sensitivity Analysis, and Controller Synthesis of Multipickup Bidirectional Inductive Power Transfer Systems. IEEE Trans. Ind. Inform. 2014, 10, 1372–1380. [Google Scholar] [CrossRef]
- Thrimawithana, D.J.; Madawala, U.K. A Generalized Steady-State Model for Bidirectional IPT Systems. IEEE Trans. Power Electron. 2013, 28, 4681–4689. [Google Scholar] [CrossRef]
- Vishal; Ohri, J. GA tuned LQR and PID controller for aircraft pitch control. In Proceedings of the 2014 IEEE 6th India International Conference on Power Electronics (IICPE), Kurukshetra, India, 8–10 December 2014; pp. 1–6. [Google Scholar]
- Wongsathan, C.; Sirima, C. Application of GA to design LQR controller for an Inverted Pendulum System. In Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 22–25 February 2009; pp. 951–954. [Google Scholar]
- Habib, M.; Khoucha, F.; Harrag, A. GA-based robust LQR controller for interleaved boost DC-DC converter improving fuel cell voltage regulation. Electr. Power Syst. Res. 2017, 152, 438–456. [Google Scholar] [CrossRef]
- Yu, W.; Li, J.; Yuan, J.; Ji, X. LQR controller design of active suspension based on genetic algorithm. In Proceedings of the 2021 IEEE 5th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Xi’an, China, 15–17 October 2021; Volume 5, pp. 1056–1060. [Google Scholar]
- Abdelrahim, M.; Mabrok, M.A.; Darwish, M.A.H. Networked control design for an engine throttle valve system. Int. J. Control 2022, 1–8. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Sabzalian, M.H.; Zhang, C.; Castillo, O.; Sakthivel, R.; El-Sousy, F. Modern Adaptive Fuzzy Control Systems; Springer: Cham, Switzerland, 2023. [Google Scholar]
- Mohammadzadeh, A.; Sabzalian, M.H.; Castillo, O.; Sakthivel, R.; El-Sousy, F. Neural Networks and Learning Algorithms in MATLAB; Springer: Cham, Switzerland, 2022. [Google Scholar]
- Li, X.; Sun, K.; Guo, C.; Liu, H. Modeling and Experimental Validation for a Large-Scale and Ultralight Inflatable Robotic Arm. IEEE/ASME Trans. Mechatronics 2022, 27, 418–429. [Google Scholar] [CrossRef]
- Li, X.; Yue, H.; Yang, D.; Sun, K.; Liu, H. A Large-Scale Inflatable Robotic Arm toward Inspecting Sensitive Environments: Design and Performance Evaluation. IEEE Trans. Ind. Electron. 2023, 70, 12486–12499. [Google Scholar] [CrossRef]
- Li, X.; Sun, K.; Guo, C.; Liu, H. Hybrid adaptive disturbance rejection control for inflatable robotic arms. ISA Trans. 2022, 126, 617–628. [Google Scholar] [CrossRef]
- Andry, A.; Shapiro, E.; Chung, J. Eigenstructure Assignment for Linear Systems. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 711–729. [Google Scholar] [CrossRef]
- Anderson, B.; Moore, J. Optimal Control: Linear Quadratic Methods; Prentice-Hall International, Inc.: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Ipaye, A.A.; Chen, Z.; Asim, M.; Chelloug, S.A.; Guo, L.; Ibrahim, A.M.; Abd El-Latif, A.A. Location and Time Aware Multitask Allocation in Mobile Crowd-Sensing Based on Genetic Algorithm. Sensors 2022, 22, 3013. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 46.51 H | 2.5329 F | ||
| 22.48 H | M | 8 F | |
| 23.49 H | 0.0152 | ||
| 46.28 H | 0.0158 | ||
| 2.49 F | 0.0179 | ||
| 2.47 F | 0.0122 | ||
| 2.5307 F |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelrahim, M.; Almakhles, D. Observer-Based Control of Inductive Wireless Power Transfer System Using Genetic Algorithm. Processes 2023, 11, 1859. https://doi.org/10.3390/pr11061859
Abdelrahim M, Almakhles D. Observer-Based Control of Inductive Wireless Power Transfer System Using Genetic Algorithm. Processes. 2023; 11(6):1859. https://doi.org/10.3390/pr11061859
Chicago/Turabian StyleAbdelrahim, Mahmoud, and Dhafer Almakhles. 2023. "Observer-Based Control of Inductive Wireless Power Transfer System Using Genetic Algorithm" Processes 11, no. 6: 1859. https://doi.org/10.3390/pr11061859
APA StyleAbdelrahim, M., & Almakhles, D. (2023). Observer-Based Control of Inductive Wireless Power Transfer System Using Genetic Algorithm. Processes, 11(6), 1859. https://doi.org/10.3390/pr11061859