

Accelerated Arithmetic Optimization Algorithm by Cuckoo Search for Solving Engineering Design Problems

 , , ,
, , ,  and
and 
Abstract
:1. Introduction
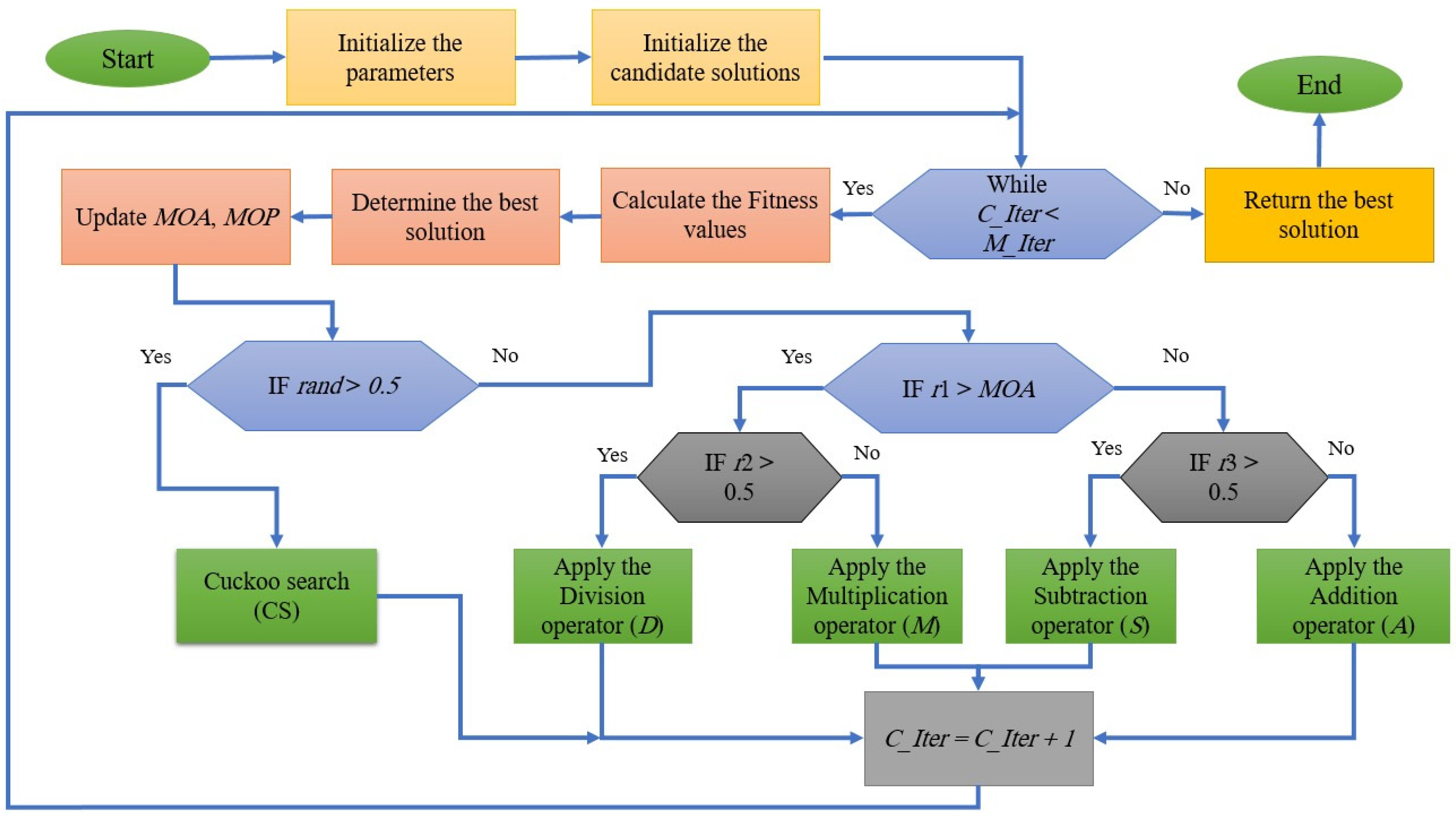
- We suggest a brand-new hybrid algorithm called AOACS based on the arithmetic optimization algorithm (AOA) and cuckoo search (CS) approach inspired by the AOA and CS algorithm design.
- CS aids the suggested algorithm in increasing the diversity of the original population and its capacity to depart from the local optimum.
- Enhanced AOA exploration and exploitation to increase convergence accuracy.
- Twenty-three benchmark functions and CEC-2019 functions are implemented to increase the ability of AOACS to solve several numerical optimization problems.
- The performance of AOACS is validated using three engineering optimization issues: the welded beam, the three-bar truss, the stepped cantilever beam, and the speed reducer design.
- The results indicate the out-performance of AOACS over the basic AOA, CS, and other metaheuristic approaches.
2. Arithmetic Optimization Algorithm (AOA)
| Algorithm 1 Pseudo-code of AOA algorithm. | ||
| Initialize the population size N and the maximum iteration T | ||
| Initialize the population size of each search agent Xi (I = 1,2, …, N) | ||
| While tT | ||
| Check if the position goes beyond the search space boundary and the adjust it. | ||
| Evaluate the fitness values of all search agents | ||
| Set Xbest as the position of current best solution | ||
| Calculate the MOA value using Equation (1) | ||
| Calculate the MOP value using Equation (2) | ||
| For i = 1 to N | ||
| If r1 MOA then | ||
| Update the search agent’s position using Equation (3) | ||
| Else | ||
| Update the search agent’s position using Equation (4) | ||
| End If | ||
| End For | ||
| t = t + 1 | ||
| End While | ||
| Return Xbest | ||
3. Cuckoo Search Algorithm
| Algorithm 2 Pseudo-code of Cuckoo search algorithm. | ||
| Objective function f | ||
| Generation t = 1 | ||
| Initial a population of n host nests | ||
| While (t Stop criterion) | ||
| Get a cuckoo (i) randomly by Lévy flight | ||
| Evaluate the fitness values of all search agents F | ||
| Choose a nest among n (such as c) randomly | ||
| If ) | ||
| Replace c by the new solution | ||
| End If | ||
| Abandon a faction () of the worst nests and build new ones | ||
| Keep the optimal solutions. | ||
| Rank the solutions an find the current best. | ||
| Update the generation number t = t + 1 | ||
| End While | ||
4. Hybridization of AOA with CS Algorithm
5. Results and Discussion
5.1. Benchmark Functions Description
5.2. The Global Optimization Results
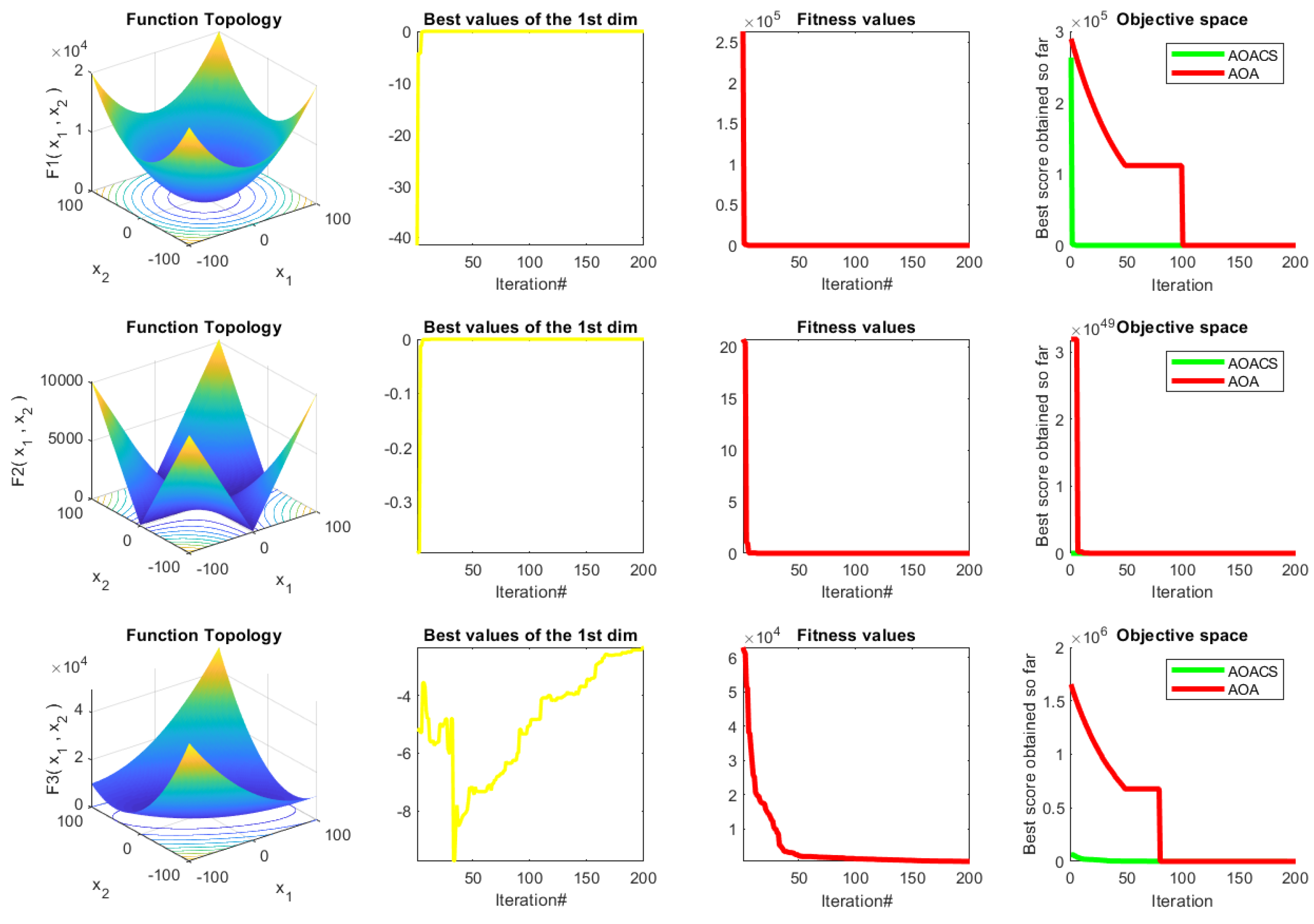
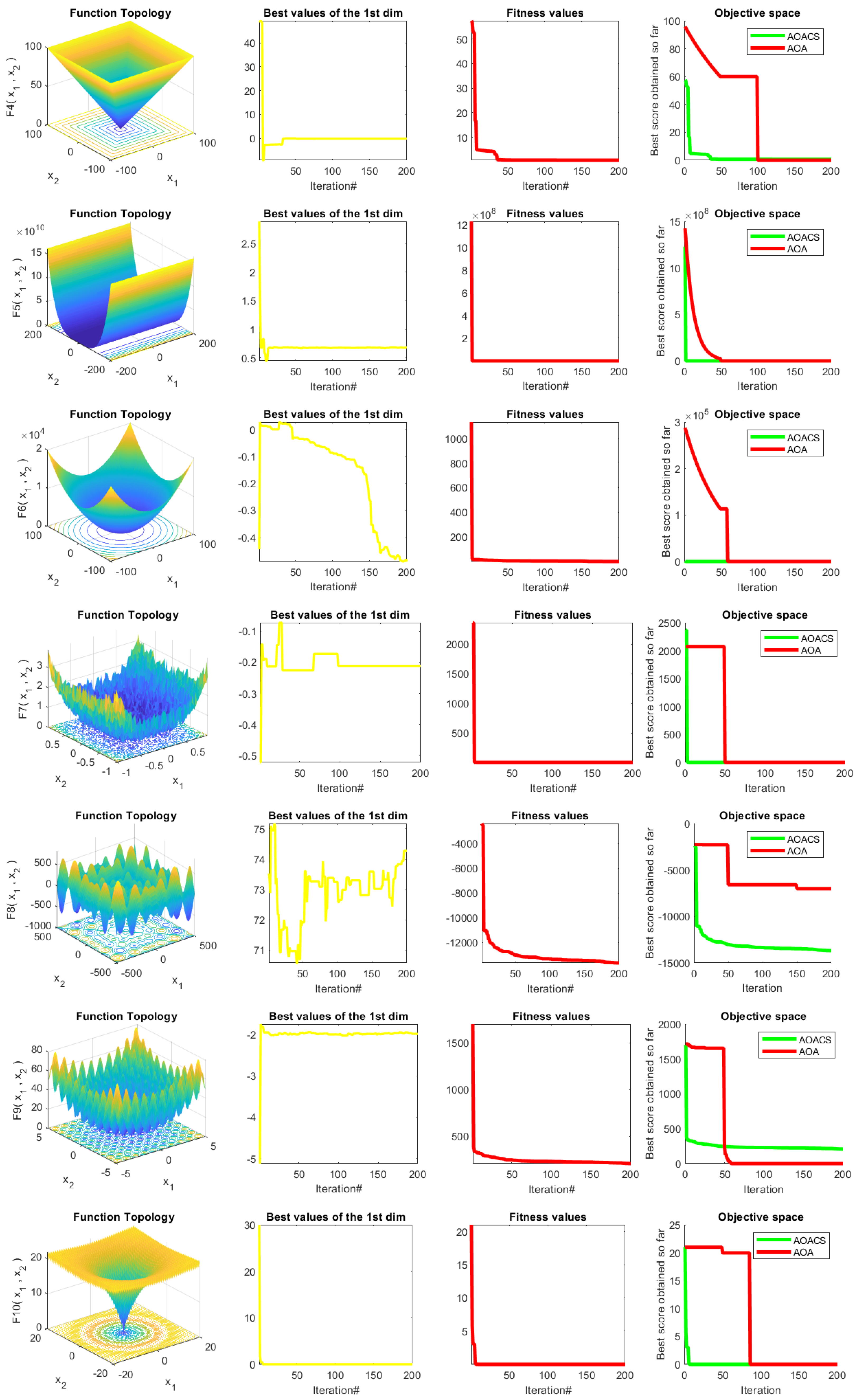
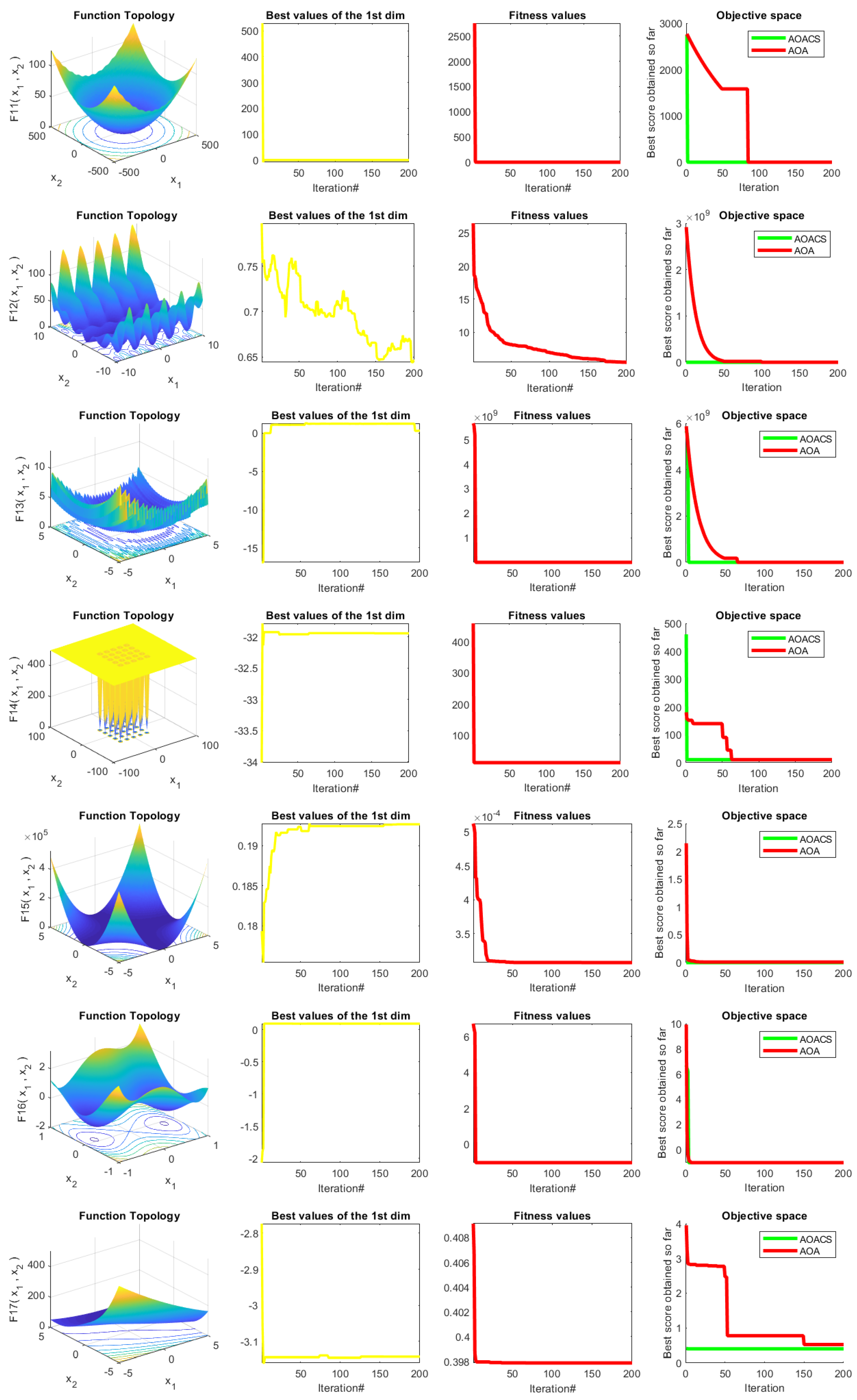
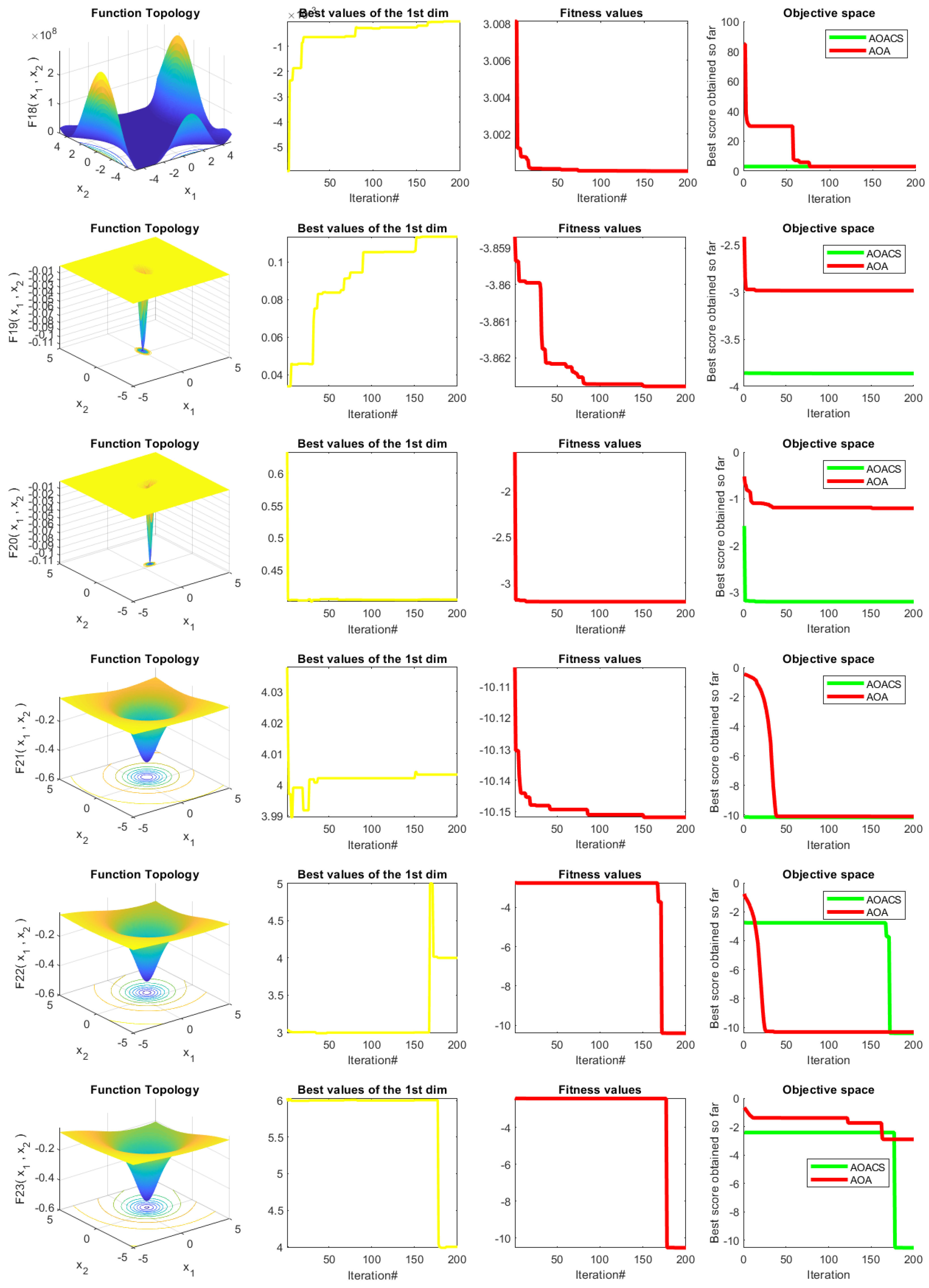
5.2.1. Achieved Qualitative Results
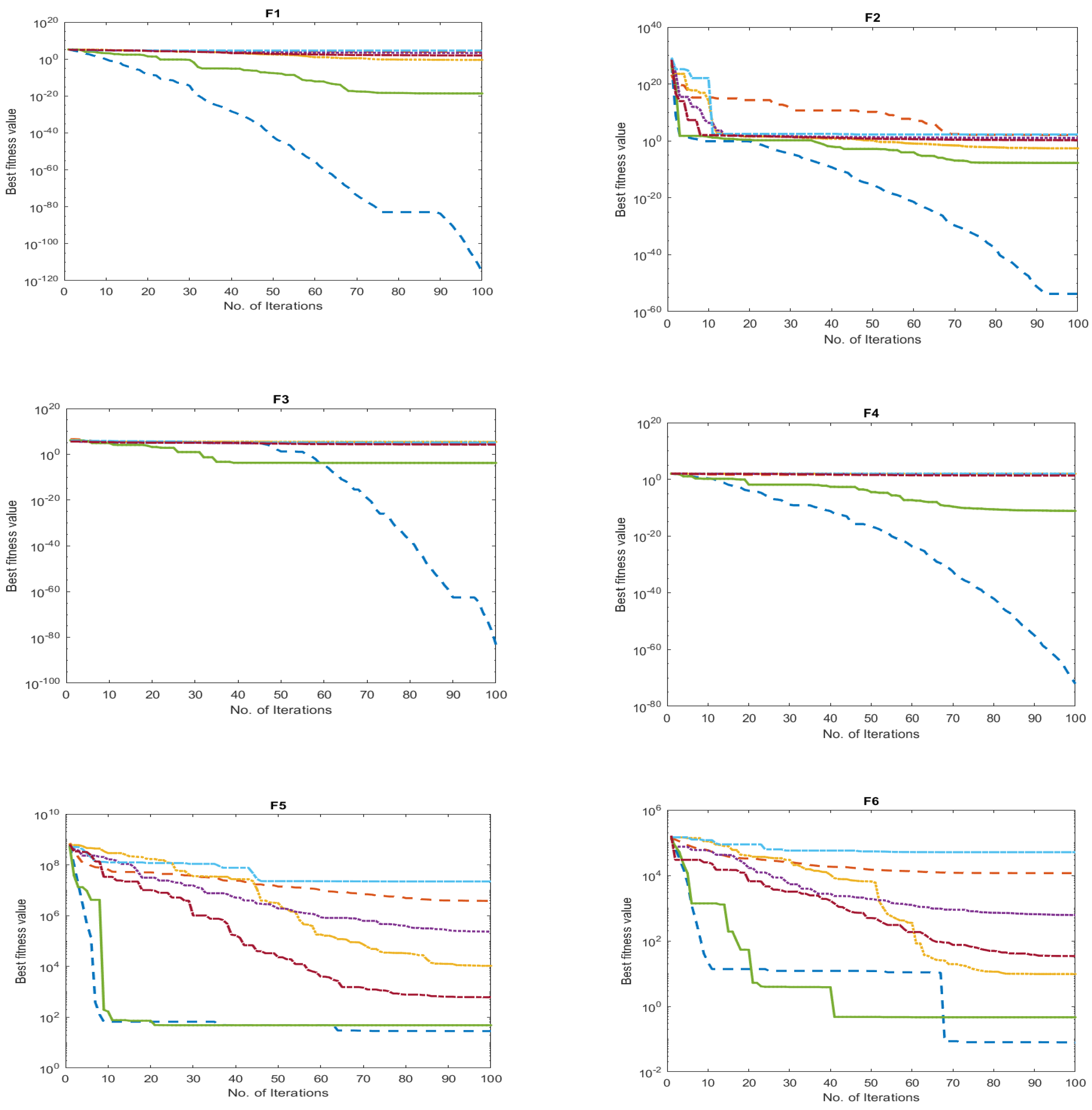
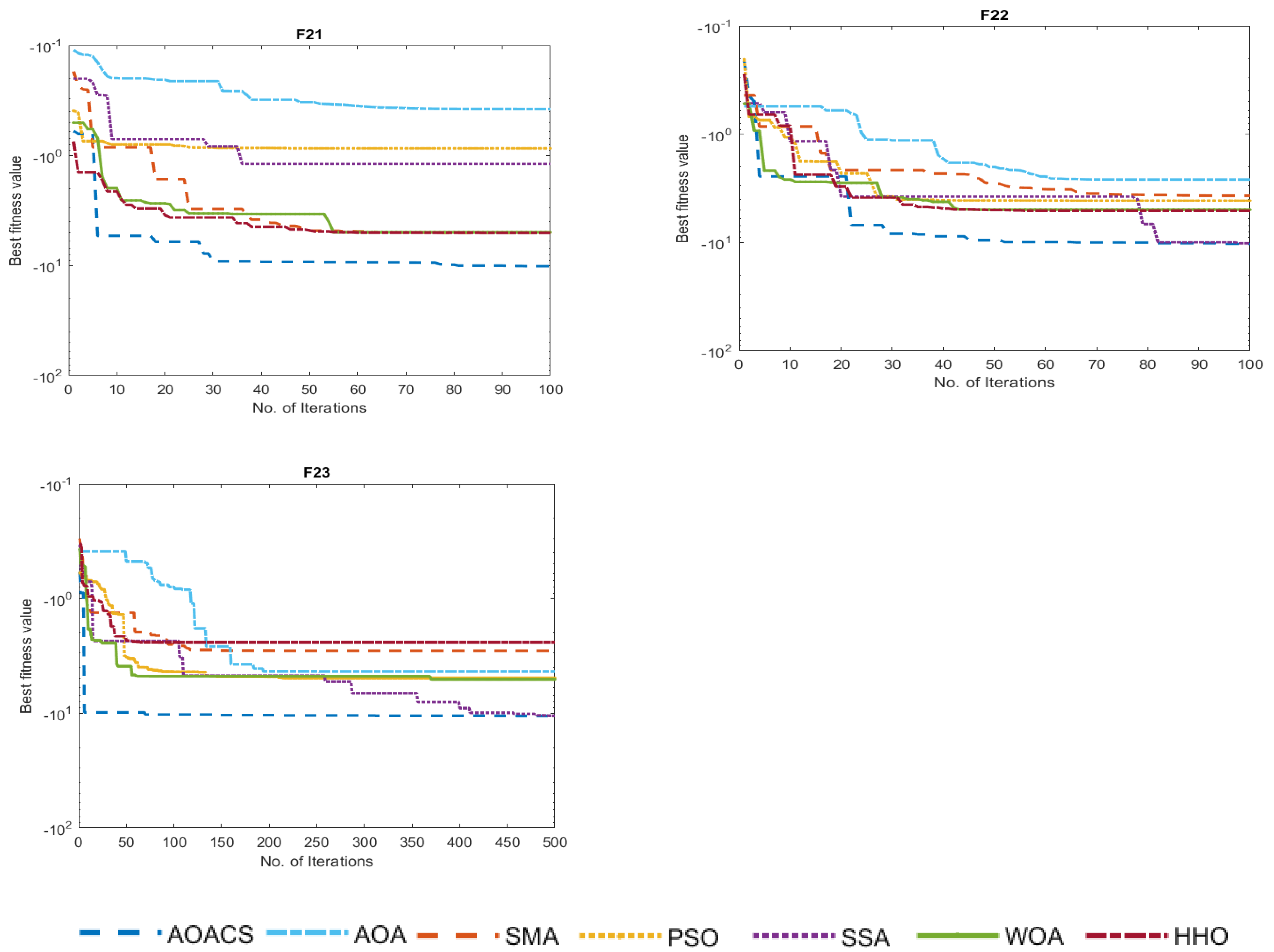
5.2.2. Results of Simulation of 23 Benchmark Functions and Discussions
5.2.3. Scalability Study
- 1.
- Experiments on 13 benchmark functions:
- 2.
- Experiments on 10 CEC2019 benchmark functions.
6. AOACS for Solving Real Word Engineering Optimization Problems
6.1. Welded Beam
6.2. Three-Bar Truss
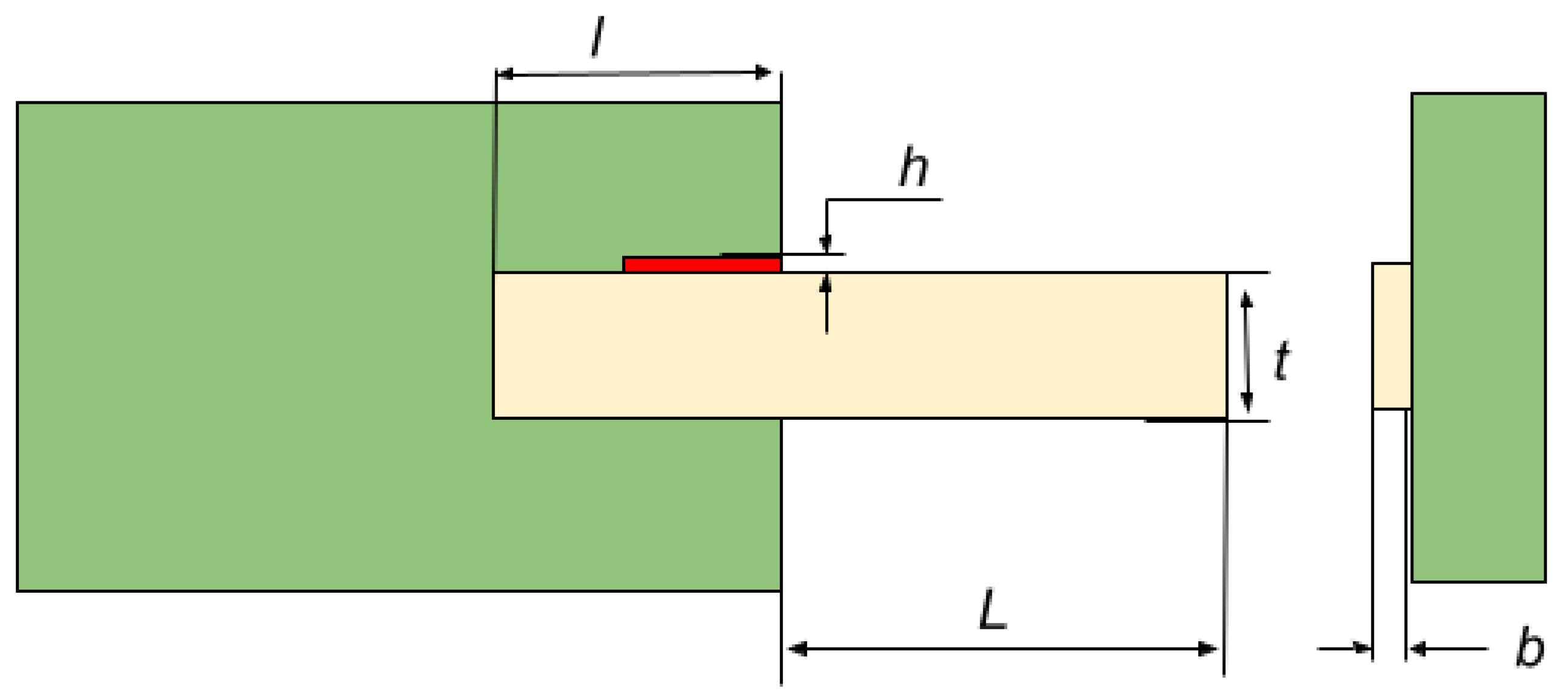
6.3. Stepped Cantilever Beam Design
6.4. Speed Reducer Design
7. Conclusions
- Hybridization with other optimization algorithms: The proposed algorithm could be combined with other optimization algorithms, such as the Genetic Algorithm (GA) or Particle Swarm Optimization (PSO), to create hybrid algorithms that leverage the strengths of both approaches. Hybrid algorithms may lead to even better optimization performance for certain types of engineering design problems.
- Parameter tuning: The performance of the proposed algorithm is highly dependent on the values of its parameters, such as the population size and the number of iterations. Future work could focus on finding optimal parameter settings that can improve the performance of the algorithm.
- Application to real-world engineering problems: The proposed algorithm has the potential to be applied to real-world engineering design problems, such as designing efficient aircraft or optimizing the performance of renewable energy systems. Future research could focus on applying the proposed algorithm to such problems and evaluating its performance in comparison to other optimization algorithms.
- Further theoretical analysis: Theoretical analysis of the proposed algorithm, such as convergence analysis or complexity analysis, could provide deeper insights into its behavior and limitations. Such analysis could also guide the development of more efficient optimization algorithms in the future.
- Extension to multi-objective optimization: The proposed algorithm is currently designed to optimize single-objective problems. Future research could focus on extending the algorithm to solve multi-objective optimization problems, where multiple conflicting objectives need to be optimized simultaneously.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alomari, A.; Idris, N.; Sabri, A.Q.M.; Alsmadi, I. Deep reinforcement and transfer learning for abstractive text summarization: A review. Comput. Speech Lang. 2022, 71, 101276. [Google Scholar] [CrossRef]
- Tan, Y.; Zhu, Y. Fireworks algorithm for optimization. In Proceedings of the International Conference in Swarm Intelligence, Beijing, China, 12–15 June 2010; pp. 355–364. [Google Scholar]
- Abdulhameed, S.; Rashid, T.A. Child drawing development optimization algorithm based on child’s cognitive development. Arab. J. Sci. Eng. 2022, 47, 1337–1351. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching--learning-based optimization: An optimization method for continuous non-linear large scale problems. Inf. Sci. 2012, 183, 1. [Google Scholar] [CrossRef]
- Kumar, M.; Kulkarni, A.J.; Satapathy, S.C. Socio evolution & learning optimization algorithm: A socio-inspired optimization methodology. Fut. Gener. Comput. Syst. 2018, 81, 252–272. [Google Scholar]
- Mirjalili, S. Genetic algorithm. In Evolutionary Algorithms and Neural Networks; Springer: Berlin/Heidelberg, Germany, 2019; pp. 43–55. [Google Scholar]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Ezugwu, A.E.; Agushaka, J.O.; Abualigah, L.; Mirjalili, S.; Gandomi, A.H. Prairie dog optimization algorithm. Neural Comput. Appl. 2022, 34, 20017–20065. [Google Scholar] [CrossRef]
- Mirjalili, S.Z.; Mirjalili, S.; Saremi, S.; Faris, H.; Aljarah, I. Grasshopper optimization algorithm for multi-objective optimization problems. Appl. Intell. 2018, 48, 805–820. [Google Scholar] [CrossRef]
- Shehab, M.; Abualigah, L.; Al Hamad, H.; Alabool, H.; Alshinwan, M.; Khasawneh, A.M. Moth--flame optimization algorithm: Variants and applications. Neural Comput. Appl. 2020, 32, 9859–9884. [Google Scholar] [CrossRef]
- Yang, X.-S.; Slowik, A. Firefly algorithm. In Swarm Intelligence Algorithms; CRC Press: Boca Raton, FL, USA, 2020; pp. 163–174. [Google Scholar]
- Abualigah, L.; Yousri, D.; Abd Elaziz, M.; Ewees, A.A.; Al-Qaness, M.A.A.; Gandomi, A.H. Aquila optimizer: A novel meta-heuristic optimization algorithm. Comput. Ind. Eng. 2021, 157, 107250. [Google Scholar] [CrossRef]
- Abualigah, L.; Shehab, M.; Alshinwan, M.; Mirjalili, S.; Abd Elaziz, M. Ant lion optimizer: A comprehensive survey of its variants and applications. Arch. Comput. Methods Eng. 2021, 28, 1397–1416. [Google Scholar] [CrossRef]
- Civicioglu, P. Evolutionary Strategies algorithm (ES) search optimization algorithm for numerical optimization problems. Appl. Math. Comput. 2013, 219, 8121–8144. [Google Scholar]
- Price, K.V. Differential evolution. In Handbook of Optimization; Springer: Berlin/Heidelberg, Germany, 2013; pp. 187–214. [Google Scholar]
- Cheraghalipour, A.; Hajiaghaei-Keshteli, M.; Paydar, M.M. Tree Growth Algorithm (TGA): A novel approach for solving optimization problems. Eng. Appl. Artif. Intell. 2018, 72, 393–414. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Hatamlou, A. Multi-verse optimizer: A nature-inspired algorithm for global optimization. Neural Comput. Appl. 2016, 27, 495–513. [Google Scholar] [CrossRef]
- Hatamlou, A. Black hole: A new heuristic optimization approach for data clustering. Inf. Sci. (Ny) 2013, 222, 175–184. [Google Scholar] [CrossRef]
- Hsiao, Y.-T.; Chuang, C.-L.; Jiang, J.-A.; Chien, C.-C. A novel optimization algorithm: Space gravitational optimization. In Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics, Waikoloa, HI, USA, 12 October 2005; Volume 3, pp. 2323–2328. [Google Scholar]
- Abualigah, L.; Diabat, A.; Mirjalili, S.; Abd Elaziz, M.; Gandomi, A.H. The arithmetic optimization algorithm. Comput. Methods Appl. Mech. Eng. 2021, 376, 113609. [Google Scholar] [CrossRef]
- Hashim, F.A.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W.; Mirjalili, S. Henry gas solubility optimization: A novel physics-based algorithm. Fut. Gener. Comput. Syst. 2019, 101, 646–667. [Google Scholar] [CrossRef]
- Gao, Z.-M.; Zhao, J.; Hu, Y.-R.; Chen, H.-F. The challenge for the nature-inspired global optimization algorithms: Non-symmetric benchmark functions. IEEE Access 2021, 9, 106317–106339. [Google Scholar] [CrossRef]
- Alsarhan, T.; Ali, U.; Lu, H. Enhanced discriminative graph convolutional network with adaptive temporal modelling for skeleton-based action recognition. Comput. Vis. Image Underst. 2022, 216, 103348. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Y.; Li, S.; Yao, F.; Tao, L.; Yan, Y.; Zhao, J.; Gao, Z. An enhanced adaptive comprehensive learning hybrid algorithm of Rao-1 and JAYA algorithm for parameter extraction of photovoltaic models. Math. Biosci. Eng. 2022, 19, 5610–5637. [Google Scholar] [CrossRef]
- AlMahmoud, R.H.; Hammo, B.; Faris, H. A modified bond energy algorithm with fuzzy merging and its application to Arabic text document clustering. Expert Syst. Appl. 2020, 159, 113598. [Google Scholar] [CrossRef]
- Li, S.; Gong, W.; Wang, L.; Gu, Q. Multi-objective optimal power flow with stochastic wind and solar power. Appl. Soft Comput. 2022, 114, 108045. [Google Scholar] [CrossRef]
- Abualigah, L.; Almotairi, K.H.; Abd Elaziz, M.; Shehab, M.; Altalhi, M. Enhanced Flow Direction Arithmetic Optimization Algorithm for mathematical optimization problems with applications of data clustering. Eng. Anal. Bound. Elem. 2022, 138, 13–29. [Google Scholar] [CrossRef]
- Elkasem, A.H.A.; Khamies, M.; Magdy, G.; Taha, I.B.M.; Kamel, S. Frequency stability of AC/DC interconnected power systems with wind energy using arithmetic optimization algorithm-based fuzzy-PID controller. Sustainability 2021, 13, 12095. [Google Scholar] [CrossRef]
- Bansal, P.; Gehlot, K.; Singhal, A.; Gupta, A. Automatic detection of osteosarcoma based on integrated features and feature selection using binary arithmetic optimization algorithm. Multimed. Tools Appl. 2022, 81, 8807–8834. [Google Scholar] [CrossRef] [PubMed]
- Ewees, A.A.; Al-qaness, M.A.A.; Abualigah, L.; Oliva, D.; Algamal, Z.Y.; Anter, A.M.; Ali Ibrahim, R.; Ghoniem, R.M.; Abd Elaziz, M. Boosting arithmetic optimization algorithm with genetic algorithm operators for feature selection: Case study on cox proportional hazards model. Mathematics 2021, 9, 2321. [Google Scholar] [CrossRef]
- Zhang, Y.-J.; Yan, Y.-X.; Zhao, J.; Gao, Z.-M. AOAAO: The hybrid algorithm of arithmetic optimization algorithm with aquila optimizer. IEEE Access 2022, 10, 10907–10933. [Google Scholar] [CrossRef]
- Zhang, Y.-J.; Wang, Y.-F.; Yan, Y.-X.; Zhao, J.; Gao, Z.-M. LMRAOA: An improved arithmetic optimization algorithm with multi-leader and high-speed jumping based on opposition-based learning solving engineering and numerical problems. Alex. Eng. J. 2022, 61, 12367–12403. [Google Scholar] [CrossRef]
- Shehab, M.; Daoud, M.S.; AlMimi, H.M.; Abualigah, L.M.; Khader, A.T. Hybridising cuckoo search algorithm for extracting the ODF maxima in spherical harmonic representation. Int. J. Bio-Inspired Comput. 2019, 14, 190–199. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Fut. Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Abualigah, L.; Shehab, M.; Alshinwan, M.; Alabool, H. Salp swarm algorithm: A comprehensive survey. Neural Comput. Appl. 2020, 32, 11195–11215. [Google Scholar] [CrossRef]
- Li, S.; Chen, H.; Wang, M.; Heidari, A.A.; Mirjalili, S. Slime mould algorithm: A new method for stochastic optimization. Fut. Gener. Comput. Syst. 2020, 111, 300–323. [Google Scholar] [CrossRef]
- Bertsekas, D.P. Constrained Optimization and Lagrange Multiplier Methods; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Coello, C.A.C. Theoretical and numerical constraint-handling techniques used with evolutionary algorithms: A survey of the state of the art. Comput. Methods Appl. Mech. Eng. 2002, 191, 1245–1287. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Method Name | Abbreviation | Idea | Year |
|---|---|---|---|---|
| [1] | Fireworks Algorithm | FW | There are two different sorts of explosion (search) procedures used and there are well-designed devices for containing a variety of sparks. | 2010 |
| [2] | Child Drawing Development Optimization Algorithm | CDD | By applying the golden ratio to enhance the beauty of their work, the learning behavior and cognitive development of the child are optimized. | 2022 |
| [3] | Teaching-based learning algorithm | TBLA | The suggested approach is based on how a teacher’s influence affects students’ performance in a class. | 2012 |
| [4] | Socio Evolution & Learning Optimizer | SELO | This approach draws its inspiration from how people develop social skills when they are arranged into families in a societal setting. | 2018 |
| [8] | Prairie Dog Optimization Algorithm | PDOA | This approach using prairie dogs behaves as they would in their native environment. | 2022 |
| [9] | Aquila optimizer | AO | This technique draws inspiration from the way aquilas grab their prey in the wild. | 2021 |
| [19] | The arithmetic optimization algorithm | AOA | This technique makes use of the distributional properties of the primary mathematical arithmetic operators. | 2021 |
| Fun. | Fun. Description | Dim. | Range | fmin |
|---|---|---|---|---|
| Unimodal Benchmark Functions | ||||
| F1 | 10,100 | [−100, 100] | 0 | |
| F2 | 10,100 | [−10, 10] | 0 | |
| F3 | 10,100 | [−100, 100] | 0 | |
| F4 | 10,100 | [−100, 100] | 0 | |
| F5 | 10,100 | [−30, 30] | 0 | |
| F6 | 10,100 | [−100, 100] | 0 | |
| F7 | ||||
| Multimodal Benchmark Functions | ||||
| F8 | 10,100 | [−500, 500] | −418.9829 | |
| F9 | 10,100 | [−5.12, 5.12] | 0 | |
| F10 | 10,100 | [−32, 32] | 0 | |
| F11 | 10,100 | [−600, 600] | 0 | |
| F12 | 10,100 | [−50, 50] | 0 | |
| F13 | 10,100 | [−50, 50] | 0 | |
| Fixed-Dimension Multimodal Benchmark Functions | ||||
| F14 | 2 | [−65, 65] | 1 | |
| F15 | 4 | [−5, 5] | 0.398 | |
| F16 | 2 | [−5, 5] | −1.0316 | |
| F17 | 2 | [−5, 5] | 0.398 | |
| F18 | 2 | [−2, 2] | 3 | |
| F19 | 3 | [−1, 2] | −3.86 | |
| F20 | 6 | [0, 1] | −0.32 | |
| F21 | 4 | [0, 1] | −10.1532 | |
| F22 | 4 | [0, 1] | −10.4028 | |
| F23 | 4 | [0, 1] | −10.5363 | |
| Algorithm | Parameters |
|---|---|
| AOACS | μ = 0.5; |
| α = 5; | |
| PSO | wMax = 0.9; |
| wMin = 0.2; | |
| c1 = 2; | |
| c2 = 2 | |
| WOA | a1 ∈ [2, 0]; |
| a2 ∈ [−1, −2]; | |
| b = 1 | |
| SSA | Random values c2 and c3 [1, 0] |
| SMA | z = 0.01 |
| HHO | α = 1.5 |
| AOA | μ = 0.5; α = 5; |
| Function | Measure | Algorithm | ||||||
|---|---|---|---|---|---|---|---|---|
| PSO | WOA | SSA | SMA | HHO | AOA | AOACS | ||
| F1 | Best | 6.12 × 103 | 3.64 × 102 | 6.51 × 103 | 2.76 × 101 | 1.15 × 102 | 3.66 × 10−9 | 3.64 × 10−68 |
| Average | 3.00 × 103 | 1.60 × 102 | 1.49 × 103 | 1.11 × 101 | 5.95 × 101 | 7.88 × 10−10 | 7.28 × 10−69 | |
| Worst | 1.43 × 103 | 1.81 × 101 | 3.92 × 101 | 5.57 × 10−1 | 2.70 × 101 | 6.73 × 10−17 | 1.06 × 10−76 | |
| STD | 2.07 × 103 | 1.28 × 102 | 2.81 × 103 | 1.25 × 101 | 3.69 × 101 | 1.61 × 10−9 | 1.63 × 10−68 | |
| p-value | 1.19 × 10−2 | 2.36 × 10−2 | 2.69 × 10−1 | 8.04 × 10−2 | 6.89 × 10−3 | 1 | 3.05 × 10−1 | |
| h | 1 | 1 | 0 | 0 | 1 | 0 | 0 | |
| F2 | Best | 3.76 × 101 | 1.14 × 101 | 0.452 × 101 | 0.238 × 101 | 0.494 × 101 | 9.87 × 10−5 | 3.77 × 10−27 |
| Average | 1.98 × 101 | 0.450 × 101 | 0.226 × 101 | 5.38 × 10−1 | 0.260 × 101 | 2.06 × 10−5 | 7.54 × 10−28 | |
| Worst | 0.907 × 10−1 | 0.203 × 101 | 5.15 × 10−1 | 2.38 × 10−2 | 0.103 × 101 | 2.19 × 10−10 | 9.73 × 10−39 | |
| STD | 1.34 × 101 | 0.394 × 101 | 0.160 × 101 | 0.103 × 101 | 0.162 × 101 | 4.37 × 10−5 | 1.68 × 10−27 | |
| p-valu×10 | 1.07 × 10−2 | 3.39 × 10−2 | 1.34 × 10−2 | 2.76 × 10−1 | 7.03 × 10−3 | 1 | 3.23 × 10−1 | |
| h | 1 | 1 | 1 | 0 | 1 | 0 | 0 | |
| F3 | B×10 st | 1.74 × 104 | 7.62 × 103 | 5.40 × 103 | 3.15 × 104 | 2.01 × 103 | 9.11 × 10−2 | 8.27 × 10−55 |
| Average | 7.44 × 103 | 3.19 × 103 | 3.94 × 103 | 1.75 × 104 | 7.80 × 102 | 1.82 × 10−2 | 1.69 × 10−55 | |
| Worst | 4.24 × 103 | 1.19 × 103 | 1.26 × 103 | 6.84 × 103 | 8.88 × 101 | 5.68 × 10−14 | 1.54 × 10−63 | |
| STD | 5.60 × 103 | 2.60 × 103 | 1.80 × 103 | 9.39 × 103 | 8.89 × 102 | 4.08 × 10−2 | 3.68 × 10−55 | |
| p-value | 1.79 × 10−2 | 2.54 × 10−2 | 1.19 × 10−3 | 3.17 × 10−3 | 8.56 × 10−2 | 1 | 3.46 × 10−1 | |
| h | 1 | 1 | 1 | 1 | 0 | 0 | 0 | |
| F4 | Best | 6.21 × 101 | 1.94 × 101 | 6.43 × 101 | 7.67 × 101 | 9.86 × 100 | 6.42 × 10−5 | 4.95 × 10−33 |
| Average | 3.67 × 101 | 1.58 × 101 | 3.64 × 101 | 5.19 × 101 | 0.697 × 101 | 1.93 × 10−5 | 2.13 × 10−33 | |
| Worst | 2.10 × 101 | 1.34 × 101 | 1.61 × 101 | 2.52 × 101 | 0.400 × 101 | 4.89 × 10−7 | 7.72 × 10−38 | |
| STD | 1.65 × 101 | 0.263 × 101 | 2.12 × 101 | 1.98 × 101 | 0.275 × 101 | 2.64 × 10−5 | 2.45 × 10−33 | |
| p-value | 1.09 × 10−3 | 9.00 × 10−7 | 4.89 × 10−3 | 3.78 × 10−4 | 4.74 × 10−4 | 1 | 1.40 × 10−1 | |
| h | 1 | 1 | 1 | 1 | 1 | 0 | 0 | |
| F5 | Best | 1.08 × 107 | 7.00 × 103 | 4.19 × 105 | 3.79 × 104 | 3.63 × 103 | 0.894 × 101 | 8.99 × 100 |
| Average | 2.98 × 106 | 2.02 × 103 | 2.42 × 105 | 1.94 × 104 | 2.71 × 103 | 0.734 × 101 | 8.94 × 100 | |
| Worst | 5.59 × 104 | 3.23 × 102 | 8.08 × 104 | 6.84 × 102 | 5.27 × 102 | 0.107 × 101 | 8.79 × 100 | |
| STD | 4.51 × 106 | 2.86 × 103 | 1.34 × 105 | 1.74 × 104 | 1.30 × 103 | 0.351 × 101 | 8.25 × 10−2 | |
| p-value | 1.77 × 10−1 | 1.55 × 10−1 | 3.72 × 10−3 | 3.68 × 10−2 | 1.65 × 10−3 | 1 | 3.39 × 10−1 | |
| h | 0 | 0 | 1 | 1 | 1 | 0 | 0 | |
| F6 | Best | 1.12 × 104 | 2.32 × 103 | 1.87 × 103 | 6.20 × 101 | 7.76 × 101 | 4.03 × 10−1 | 1.54 × 100 |
| Average | 4.23 × 103 | 9.19 × 102 | 6.91 × 102 | 2.29 × 101 | 4.00 × 101 | 1.22 × 10−1 | 1.24 × 100 | |
| Worst | 1.11 × 103 | 7.32 × 101 | 1.27 × 101 | 0.149 × 101 | 1.30 × 101 | 1.90 × 10−5 | 9.72 × 10−1 | |
| STD | 4.19 × 103 | 8.99 × 102 | 7.22 × 102 | 2.55 × 101 | 2.80 × 101 | 1.76 × 10−1 | 2.16 × 10−1 | |
| p-value | 5.39 × 10−2 | 5.16 × 10−2 | 6.49 × 10−2 | 8.03 × 10−2 | 1.29 × 10−2 | 1 | 1.90 × 10−5 | |
| h | 0 | 0 | 0 | 0 | 1 | 0 | 1 | |
| F7 | Best | 5.41 × 10−1 | 2.84 × 100 | 5.88 × 10−1 | 9.58 × 10−1 | 1.99 × 10−1 | 8.87 × 10−3 | 1.61 × 10−2 |
| Average | 2.93 × 10−1 | 9.32 × 10−1 | 3.12 × 10−1 | 3.23 × 10−1 | 1.01 × 10−1 | 6.33 × 10−3 | 6.06 × 10−3 | |
| Worst | 1.89 × 10−1 | 3.70 × 10−1 | 5.34 × 10−2 | 5.25 × 10−3 | 6.27 × 10−2 | 3.89 × 10−3 | 4.13 × 10−4 | |
| STD | 1.53 × 10−1 | 0.107 × 101 | 2.04 × 10−1 | 3.80 × 10−1 | 5.78 × 10−2 | 1.83 × 10−3 | 6.38 × 10−3 | |
| p-value | 3.03 × 10−3 | 8.90 × 10−2 | 1.00 × 10−2 | 9.95 × 10−2 | 6.26 × 10−3 | 1 | 9.31 × 10−1 | |
| h | 1 | 0 | 1 | 0 | 1 | 0 | 0 | |
| F8 | Best | −1.46 × 103 | −1.17 × 103 | −1.38 × 103 | −1.65 × 103 | −1.72 × 103 | −1.73 × 103 | −1.93 × 103 |
| Average | −1.78 × 103 | −1.40 × 103 | −1.59 × 103 | −2.10 × 103 | −1.93 × 103 | −3.17 × 103 | −3.64 × 103 | |
| Worst | −2.17 × 103 | −2.01 × 103 | −1.91 × 103 | −2.95 × 103 | −2.15 × 103 | −4.19 × 103 | −4.17 × 103 | |
| STD | 3.15 × 102 | 3.47 × 102 | 2.02 × 102 | 5.25 × 102 | 2.00 × 102 | 1.04 × 103 | 9.60 × 102 | |
| p-value | 2.10 × 10−2 | 6.86 × 10−3 | 1.04 × 10−2 | 7.48 × 10−2 | 3.04 × 10−2 | 1 | 4.82 × 10−1 | |
| h | 1 | 1 | 1 | 0 | 1 | 0 | 0 | |
| F9 | Best | 9.21 × 101 | 7.14 × 101 | 8.80 × 101 | 9.44 × 101 | 6.90 × 101 | 4.21 × 10−8 | 0 |
| Average | 6.63 × 101 | 5.48 × 101 | 6.21 × 101 | 6.80 × 101 | 3.92 × 101 | 1.03 × 10−8 | 0 | |
| Worst | 3.98 × 101 | 4.02 × 101 | 2.28 × 101 | 0.292 × 101 | 1.09 × 101 | 0 | 0 | |
| STD | 1.94 × 101 | 1.15 × 101 | 2.62 × 101 | 3.78 × 101 | 2.76 × 101 | 1.80 × 10−8 | 0 | |
| p-value | 6.08 × 10−5 | 5.32 × 10−6 | 7.28 × 10−4 | 3.80 × 10−3 | 1.30 × 10−2 | 1 | 2.35 × 10−1 | |
| H | 1 | 1 | 1 | 1 | 1 | 0 | 0 | |
| F10 | Best | 9.21 × 101 | 7.14 × 101 | 8.80 × 101 | 9.44 × 101 | 6.90 × 101 | 4.21 × 10−8 | 0 |
| Average | 6.63 × 101 | 5.48 × 101 | 6.21 × 101 | 6.80 × 101 | 3.92 × 101 | 1.03 × 10−8 | 0 | |
| Worst | 3.98 × 101 | 4.02 × 101 | 2.28 × 101 | 0.292 × 101 | 1.09 × 101 | 0 | 0 | |
| STD | 1.94 × 101 | 1.15 × 101 | 2.62 × 101 | 3.78 × 101 | 2.76 × 101 | 1.80 × 10−8 | 0 | |
| p-value | 6.08 × 10−5 | 5.32 × 10−6 | 7.28 × 10−4 | 3.80 × 10−3 | 1.30 × 10−2 | 1 | 2.35 × 10−1 | |
| h | 1 | 1 | 1 | 1 | 1 | 0 | 0 | |
| F11 | Best | 6.43 × 101 | 1.63 × 102 | 2.53 × 101 | 1.19 × 100 | 0.316 × 101 | 2.76 × 10−4 | 0 |
| Average | 2.38 × 101 | 1.01 × 102 | 1.09 × 101 | 8.03 × 10−1 | 0.204 × 101 | 8.53 × 10−5 | 0 | |
| Worst | 0.933 × 101 | 6.30 × 101 | 0.211 × 101 | 3.49 × 10−1 | 0.144 × 101 | 5.20 × 10−12 | 0 | |
| STD | 2.29 × 101 | 3.76 × 101 | 0.997 × 101 | 3.38 × 10−1 | 6.59 × 10−1 | 1.25 × 10−4 | 0 | |
| p-value | 4.90 × 10−2 | 3.31 × 10−4 | 4.00 × 10−2 | 7.18 × 10−4 | 1.23 × 10−4 | 1 | 1.65 × 10−1 | |
| h | 1 | 1 | 1 | 1 | 1 | 0 | 0 | |
| F12 | Best | 6.31 × 106 | 0.832 × 101 | 2.61 × 107 | 1.34 × 104 | 1.57 × 101 | 2.78 × 10−1 | 0.151 × 101 |
| Average | 1.36 × 106 | 0.337 × 101 | 5.81 × 106 | 2.70 × 103 | 0.712 × 101 | 6.93 × 10−2 | 4.46 × 10−1 | |
| Worst | 3.92 × 101 | 1.51 × 10−1 | 5.10 × 104 | 2.50 × 10−1 | 9.75 × 10−1 | 3.31 × 10−4 | 4.55 × 10−2 | |
| STD | 2.78 × 106 | 0.369 × 101 | 1.14 × 107 | 5.98 × 103 | 0.542 × 101 | 1.19 × 10−1 | 6.00 × 10−1 | |
| p-value | 3.07 × 10−1 | 8.08 × 10−2 | 2.85 × 10−1 | 3.42 × 10−1 | 1.97 × 10−2 | 1 | 2.05 × 10−1 | |
| h | 0 | 0 | 0 | 0 | 1 | 0 | 0 | |
| F13 | Best | 1.95 × 107 | 2.03 × 102 | 4.85 × 106 | 4.44 × 106 | 1.42 × 101 | 2.35 × 10−1 | 9.56 × 10−1 |
| Average | 5.77 × 106 | 5.72 × 101 | 1.58 × 106 | 1.30 × 106 | 0.648 × 101 | 8.06 × 10−2 | 8.84 × 10−1 | |
| Worst | 7.02 × 105 | 4.66 × 10−1 | 1.36 × 103 | 6.52 × 101 | 0.179 × 101 | 9.17 × 10−5 | 8.04 × 10−1 | |
| STD | 7.97 × 106 | 8.72 × 101 | 1.97 × 106 | 1.89 × 106 | 0.469 × 101 | 9.47 × 10−2 | 6.08 × 10−2 | |
| p-value | 1.44 × 10−1 | 1.81 × 10−1 | 1.11 × 10−1 | 1.65 × 10−1 | 1.57 × 10−2 | 1 | 2.39 × 10−7 | |
| h | 0 | 0 | 0 | 0 | 1 | 0 | 1 | |
| F14 | Worst | 2.20 × 101 | 1.27 × 101 | 1.27 × 101 | 1.56 × 101 | 1.65 × 101 | 1.17 × 101 | 1.64 × 101 |
| Average | 1.72 × 101 | 0.471 × 101 | 0.646 × 101 | 0.993 × 101 | 1.15 × 101 | 0.848 × 101 | 0.957 × 101 | |
| Best | 1.46 × 101 | 9.98 × 10−1 | 0.199 × 101 | 0.595 × 101 | 0.397 × 101 | 0.320 × 101 | 0.298 × 101 | |
| STD | 0.311 × 101 | 0.535 × 101 | 0.568 × 101 | 0.424 × 101 | 0.515 × 101 | 0.352 × 101 | 0.524 × 101 | |
| p-value | 2.00 × 10−3 | 1 | 6.29 × 10−1 | 1.26 × 10−1 | 7.54 × 10−2 | 2.25 × 10−1 | 1.85 × 10−1 | |
| H | 1 | 0 | 0 | 0 | 0 | 0 | 0 | |
| F15 | Worst | 6.17 × 10−2 | 5.59 × 10−3 | 7.91 × 10−3 | 2.64 × 10−2 | 3.60 × 10−2 | 3.62 × 10−3 | 1.64 × 10−2 |
| Average | 2.54 × 10−2 | 2.81 × 10−3 | 4.61 × 10−3 | 1.42 × 10−2 | 1.11 × 10−2 | 1.43 × 10−3 | 6.05 × 10−3 | |
| Best | 5.03 × 10−3 | 7.93 × 10−4 | 1.52 × 10−3 | 5.74 × 10−4 | 1.78 × 10−3 | 6.44 × 10−4 | 1.90 × 10−3 | |
| STD | 2.35 × 10−2 | 1.95 × 10−3 | 2.63 × 10−3 | 1.04 × 10−2 | 1.43 × 10−2 | 1.24 × 10−3 | 5.93 × 10−3 | |
| p-value | 6.49 × 10−2 | 1 | 2.54 × 10−1 | 4.28 × 10−2 | 2.36 × 10−1 | 2.20 × 10−1 | 2.79 × 10−1 | |
| H | 0 | 0 | 0 | 1 | 0 | 0 | 0 | |
| F16 | Worst | −0.103 × 101 | −0.102 × 101 | −0.100 × 101 | −0.101 × 101 | −9.49 × 10−1 | −0.103 × 101 | −0.103 × 101 |
| Average | −0.103 × 101 | −0.103 × 101 | −0.102 × 101 | −0.102 × 101 | −9.99 × 10−1 | −0.103 × 101 | −0.103 × 101 | |
| Best | −0.103 × 101 | −0.103 × 101 | −0.103 × 101 | −0.103 × 101 | −0.103 × 101 | −0.103 × 101 | −0.103 × 101 | |
| STD | 7.72 × 10−5 | 3.88 × 10−3 | 1.63 × 10−2 | 1.03 × 10−2 | 3.42 × 10−2 | 4.18 × 10−5 | 4.17 × 10−4 | |
| p-value | 1.07 × 10−1 | 1 | 2.25 × 10−1 | 2.58 × 10−1 | 9.53 × 10−2 | 1.07 × 10−1 | 1.35 × 10−1 | |
| h | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| F17 | Worst | 3.98 × 10−1 | 4.09 × 10−1 | 5.19 × 10−1 | 0.277 × 10−1 | 0.150 × 10−1 | 0.411 × 10−1 | 3.98 × 10−1 |
| Average | 3.98 × 10−1 | 4.03 × 10−1 | 4.23 × 10−1 | 0.104 × 10−1 | 8.57 × 10−1 | 0.114 × 10−1 | 3.98 × 10−1 | |
| Best | 3.98 × 10−1 | 3.98 × 10−1 | 3.98 × 10−1 | 4.08 × 10−1 | 4.00 × 10−1 | 3.98 × 10−1 | 3.98 × 10−1 | |
| STD | 1.18 × 10−4 | 4.52 × 10−3 | 5.39 × 10−2 | 9.82 × 10−1 | 4.61 × 10−1 | 0.166 × 10−1 | 7.87 × 10−6 | |
| p-value | 3.59 × 10−2 | 1 | 4.45 × 10−1 | 1.87 × 10−1 | 5.89 × 10−2 | 3.46 × 10−1 | 3.34 × 10−2 | |
| h | 1 | 0 | 0 | 0 | 0 | 0 | 1 | |
| F18 | Worst | 9.18 × 101 | 0.453 × 10−1 | 3.00 × 101 | 2.51 × 101 | 1.79 × 101 | 9.37 × 101 | 0.323 × 10−1 |
| Average | 3.77 × 101 | 0.331 × 10−1 | 1.53 × 101 | 1.03 × 101 | 0.629 × 10−1 | 2.13 × 101 | 0.305 × 10−1 | |
| Best | 0.30 × 10−1 | 0.30 × 10−1 | 0.30 × 10−1 | 0.30 × 10−1 | 0.30 × 10−1 | 0.304 × 10−1 | 0.300 × 10−1 | |
| STD | 4.75 × 101 | 6.78 × 10−1 | 1.38 × 101 | 1.03 × 101 | 0.649 × 10−1 | 4.05 × 101 | 1.03 × 10−1 | |
| p-value | 1.44 × 10−1 | 1 | 8.72 × 10−2 | 1.68 × 10−1 | 0.338 × 10−1 | 3.49 × 10−1 | 4.09 × 10−1 | |
| H | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| F19 | Worst | −0.270 × 10−1 | −0.329 × 10−1 | −0.385 × 10−1 | −0.297 × 10−1 | −0.261 × 10−1 | −0.377 × 10−1 | −0.386 × 10−1 |
| Average | −0.330 × 10−1 | −0.368 × 10−1 | −0.386 × 10−1 | −0.348 × 10−1 | −0.346 × 10−1 | −0.382 × 10−1 | −0.386 × 10−1 | |
| Best | −0.386 × 10−1 | −0.385 × 10−1 | −0.386 × 10−1 | −0.378 × 10−1 | −0.384 × 10−1 | −0.386 × 10−1 | −0.386 × 10−1 | |
| STD | 4.92 × 10−1 | 2.26 × 10−1 | 4.27 × 10−3 | 3.26 × 10−1 | 4.96 × 10−1 | 4.24 × 10−2 | 1.01 × 10−3 | |
| p-value | 1.49 × 10−1 | 1.00 × 100 | 1.24 × 10−1 | 2.83 × 10−1 | 3.83 × 10−1 | 2.12 × 10−1 | 1.15 × 10−1 | |
| h | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| F20 | Worst | −0.114 × 10−1 | −0.151 × 10−1 | −0.259 × 10−1 | −0.213 × 10−1 | −0.171 × 10−1 | −0.311 × 10−1 | −0.313 × 10−1 |
| Average | −0.197 × 10−1 | −0.211 × 10−1 | −0.287 × 10−1 | −0.260 × 10−1 | −0.217 × 10−1 | −0.319 × 10−1 | −0.322 × 10−1 | |
| Best | −0.303 × 10−1 | −0.262 × 10−1 | −0.327 × 10−1 | −0.314 × 10−1 | −0.255 × 10−1 | −0.331 × 10−1 | −0.331 × 10−1 | |
| STD | 9.04 × 10−1 | 4.55 × 10−1 | 2.90 × 10−1 | 4.25 × 10−1 | 3.07 × 10−1 | 8.36 × 10−2 | 7.78 × 10−2 | |
| p-value | 7.56 × 10−1 | 1 | 1.36 × 10−2 | 1.19 × 10−1 | 8.27 × 10−1 | 8.12 × 10−4 | 6.63 × 10−4 | |
| h | 0 | 0 | 1 | 0 | 0 | 1 | 1 | |
| F21 | Worst | −0.267 × 10−1 | −0.221 × 10−1 | −0.489 × 10−1 | −3.51 × 10−1 | −4.84 × 10−1 | −0.256 × 10−1 | −0.253 × 10−1 |
| Average | −0.612 × 10−1 | −0.348 × 10−1 | −0.698 × 10−1 | −9.24 × 10−1 | −0.201 × 10−1 | −0.580 × 10−1 | −0.497 × 10−1 | |
| Best | −0.986 × 10−1 | −0.467 × 10−1 | −1.01 × 101 | −0.293 × 10−1 | −0.382 × 10−1 | −1.01 × 101 | −1.01 × 101 | |
| STD | 0.339 × 10−1 | 0.115 × 10−1 | 0.274 × 10−1 | 0.112 × 10−1 | 0.142 × 10−1 | 0.348 × 10−1 | 0.343 × 10−1 | |
| p-value | 1.37 × 10−1 | 1 | 3.02 × 10−2 | 7.44 × 10−3 | 1.10 × 10−1 | 1.94 × 10−1 | 3.83 × 10−1 | |
| h | 0 | 0 | 1 | 1 | 0 | 0 | 0 | |
| F22 | Worst | −0.150 × 10−1 | −0.303 × 10−1 | −0.271 × 10−1 | −5.20 × 10−1 | −3.75 × 10−1 | −0.364 × 10−1 | −0.274 × 10−1 |
| Average | −0.209 × 10−1 | −0.368 × 10−1 | −0.666 × 10−1 | −0.122 × 10−1 | −9.71 × 10−1 | −0.702 × 10−1 | −0.494 × 10−1 | |
| Best | −0.275 × 10−1 | −0.442 × 10−1 | −1.03 × 101 | −0.207 × 10−1 | −0.181 × 10−1 | −0.980 × 10−1 | −0.989 × 10−1 | |
| STD | 5.19 × 10−1 | 5.86 × 10−1 | 0.340 × 10−1 | 5.91 × 10−1 | 5.21 × 10−1 | 0.268 × 10−1 | 0.288 × 10−1 | |
| p-value | 1.89 × 10−3 | 1 | 8.86 × 10−2 | 1.72 × 10−4 | 5.68 × 10−5 | 2.60 × 10−2 | 3.63 × 10−1 | |
| h | 1 | 0 | 0 | 1 | 1 | 1 | 0 | |
| F23 | Worst | −0.144 × 10−1 | −0.329 × 10−1 | −0.514 × 10−1 | −4.06 × 10−1 | −0.107 × 10−1 | −0.222 × 10−1 | −0.241 × 10−1 |
| Average | −0.377 × 10−1 | −0.398 × 10−1 | −0.932 × 10−1 | −0.152 × 10−1 | −0.262 × 10−1 | −0.409 × 10−1 | −0.287 × 10−1 | |
| Best | −0.509 × 10−1 | −0.470 × 10−1 | −1.05 × 101 | −0.453 × 10−1 | −0.454 × 10−1 | −0.973 × 10−1 | −0.381 × 10−1 | |
| STD | 0.163 × 10−1 | 5.79 × 10−1 | 0.235 × 10−1 | 0.170 × 10−1 | 0.162 × 10−1 | 0.322 × 10−1 | 5.69 × 10−1 | |
| p-value | 7.90 × 10−1 | 1 | 1.13 × 10−3 | 1.56 × 10−2 | 1.16 × 10−1 | 9.45 × 10−1 | 1.54 × 10−2 | |
| h | 0 | 0 | 1 | 1 | 0 | 0 | 1 | |
| Fun. | Algorithm | ||||||
|---|---|---|---|---|---|---|---|
| PSO | WOA | SSA | SMA | HHO | AOA | AOACS | |
| F1 | 7 | 5 | 6 | 3 | 4 | 2 | 1 |
| F2 | 7 | 6 | 4 | 3 | 5 | 2 | 1 |
| F3 | 6 | 4 | 5 | 7 | 3 | 2 | 1 |
| F4 | 6 | 4 | 5 | 7 | 3 | 2 | 1 |
| F5 | 7 | 3 | 6 | 5 | 4 | 1 | 2 |
| F6 | 7 | 6 | 5 | 3 | 4 | 1 | 2 |
| F7 | 4 | 7 | 5 | 6 | 3 | 2 | 1 |
| F8 | 5 | 7 | 6 | 3 | 4 | 2 | 1 |
| F9 | 6 | 4 | 5 | 7 | 3 | 2 | 1 |
| F10 | 7 | 4 | 6 | 3 | 5 | 2 | 1 |
| F11 | 6 | 7 | 5 | 3 | 4 | 2 | 1 |
| F12 | 6 | 3 | 7 | 5 | 4 | 1 | 2 |
| F13 | 7 | 4 | 6 | 5 | 3 | 1 | 2 |
| F14 | 7 | 1 | 2 | 5 | 6 | 3 | 4 |
| F15 | 7 | 2 | 3 | 6 | 5 | 1 | 4 |
| F16 | 2 | 4 | 6 | 5 | 7 | 1 | 3 |
| F17 | 2 | 3 | 4 | 6 | 5 | 7 | 1 |
| F18 | 7 | 2 | 5 | 4 | 3 | 6 | 1 |
| F19 | 7 | 4 | 2 | 5 | 6 | 3 | 1 |
| F20 | 7 | 6 | 3 | 4 | 5 | 2 | 1 |
| F21 | 2 | 5 | 1 | 7 | 6 | 3 | 4 |
| F22 | 5 | 4 | 2 | 6 | 7 | 1 | 3 |
| F23 | 4 | 3 | 1 | 7 | 6 | 2 | 5 |
| Sum | 131 | 98 | 100 | 115 | 105 | 51 | 44 |
| Mean | 5.70 | 4.26 | 4.35 | 5.00 | 4.57 | 2.22 | 1.91 |
| Rank | 6 | 2 | 3 | 5 | 4 | 2 | 1 |
| Function | Measure | Algorithm | ||||||
|---|---|---|---|---|---|---|---|---|
| PSO | WOA | SSA | SMA | HHO | AOA | AOACS | ||
| F1 | Worst | 3.10 × 105 | 1.15 × 105 | 3.94 × 105 | 3.44 × 103 | 1.56 × 105 | 4.33 × 10−6 | 2.33 × 10−41 |
| Average | 2.27 × 105 | 1.05 × 105 | 2.63 × 105 | 1.28 × 103 | 1.27 × 105 | 1.32 × 10−6 | 4.66 × 10−42 | |
| Best | 1.91 × 105 | 9.80 × 104 | 1.69 × 105 | 1.36 × 102 | 9.96 × 104 | 7.18 × 10−17 | 5.83 × 10−65 | |
| STD | 4.92 × 104 | 6.61 × 103 | 9.40 × 104 | 1.29 × 103 | 2.13 × 104 | 1.94 × 10−6 | 1.04 × 10−41 | |
| p-value | 6.61 × 10−6 | 4.20 × 10−10 | 2.42 × 10−4 | 5.69 × 10−2 | 9.44 × 10−7 | 1 | 1.69 × 10−1 | |
| h | 1 | 1 | 1 | 0 | 1 | 0 | 0 | |
| F2 | Worst | 6.06 × 102 | 4.47 × 1053 | 1.40 × 102 | 0.563 × 10−1 | 1.50 × 103 | 4.07 × 10−4 | 1.40 × 10−16 |
| Average | 5.30 × 102 | 8.94 × 1052 | 1.03 × 102 | 0.308 × 10−1 | 6.19 × 102 | 1.29 × 10−4 | 2.80 × 10−17 | |
| Best | 3.82 × 102 | 8.35 × 1043 | 5.81 × 101 | 3.37 × 10−1 | 3.89 × 102 | 5.89 × 10−7 | 3.36 × 10−35 | |
| STD | 9.34 × 101 | 2.00 × 1053 | 3.12 × 101 | 0.214 × 10−1 | 4.93 × 102 | 1.73 × 10−4 | 6.27 × 10−17 | |
| p-value | 1.39 × 10−6 | 3.47 × 10−1 | 8.03 × 10−5 | 1.24 × 10−2 | 2.28 × 10−2 | 1 | 0 | |
| h | 1 | 0 | 1 | 1 | 1 | 0 | 0 | |
| F3 | Worst | 6.01 × 106 | 2.75 × 106 | 5.01 × 106 | 1.75 × 107 | 1.47 × 106 | 2.40 × 106 | 6.37 × 10−17 |
| Average | 4.15 × 106 | 1.14 × 106 | 3.67 × 106 | 1.03 × 107 | 1.00 × 106 | 1.36 × 106 | 1.27 × 10−17 | |
| Best | 2.22 × 106 | 6.02 × 105 | 3.00 × 106 | 3.78 × 106 | 7.71 × 105 | 8.11 × 101 | 8.96 × 10−57 | |
| STD | 1.39 × 106 | 9.05 × 105 | 8.07 × 105 | 5.07 × 106 | 3.02 × 105 | 9.86 × 105 | 2.85 × 10−17 | |
| p-value | 6.45 × 10−3 | 7.20 × 10−1 | 3.70 × 10−3 | 4.86 × 10−3 | 4.61 × 10−1 | 1 | 1.49 × 10−2 | |
| h | 1 | 0 | 1 | 1 | 0 | 0 | 1 | |
| F4 | Worst | 9.93 × 101 | 6.16 × 101 | 9.94 × 101 | 9.09 × 101 | 9.28 × 101 | 2.59 × 10−4 | 1.05 × 10−18 |
| Average | 9.30 × 101 | 5.82 × 101 | 9.91 × 101 | 7.76 × 101 | 8.26 × 101 | 5.26 × 10−5 | 2.10 × 10−19 | |
| Best | 8.07 × 101 | 5.59 × 101 | 9.87 × 101 | 3.37 × 101 | 7.34 × 101 | 5.34 × 10−9 | 1.77 × 10−33 | |
| STD | 0.841 × 10−1 | 0.225 × 10−1 | 3.13 × 10−1 | 2.47 × 101 | 0.832 × 10−1 | 1.15 × 10−4 | 4.71 × 10−19 | |
| p-value | 7.67 × 10−9 | 8.67 × 10−12 | 1.80 × 10−20 | 1.12 × 10−4 | 1.80 × 10−8 | 1 | 3.38 × 10−1 | |
| h | 1 | 1 | 1 | 1 | 1 | 0 | 0 | |
| F5 | Worst | 1.16 × 109 | 2.75 × 108 | 2.59 × 109 | 2.88 × 105 | 3.91 × 108 | 1.98 × 102 | 1.99 × 102 |
| Average | 5.56 × 108 | 1.93 × 108 | 2.39 × 109 | 1.57 × 105 | 1.77 × 108 | 1.58 × 102 | 1.99 × 102 | |
| Best | 2.38 × 108 | 1.17 × 108 | 2.05 × 109 | 7.67 × 102 | 6.54 × 107 | 0.105 × 10−1 | 1.99 × 102 | |
| STD | 3.67 × 108 | 5.86 × 107 | 2.05 × 108 | 1.30 × 105 | 1.32 × 108 | 8.78 × 101 | 1.40 × 10−2 | |
| p-value | 9.59 × 10−3 | 7.77 × 10−5 | 5.04 × 10−9 | 2.67 × 10−2 | 1.71 × 10−2 | 1 | 3.27 × 10−1 | |
| h | 1 | 1 | 1 | 1 | 1 | 0 | 0 | |
| F6 | Worst | 2.72 × 105 | 1.15 × 105 | 3.76 × 105 | 1.79 × 103 | 1.72 × 105 | 1.51 × 101 | 4.94 × 101 |
| Average | 2.26 × 105 | 1.02 × 105 | 2.66 × 105 | 7.60 × 102 | 1.20 × 105 | 3.53 × 100 | 4.81 × 101 | |
| Best | 1.80 × 105 | 9.46 × 104 | 1.12 × 105 | 1.05 × 102 | 8.26 × 104 | 6.33 × 10−2 | 4.73 × 101 | |
| STD | 3.98 × 104 | 7.80 × 103 | 1.15 × 105 | 7.07 × 102 | 3.39 × 104 | 0.652 × 10−1 | 9.28 × 10−1 | |
| p-value | 1.38 × 10−6 | 1.97 × 10−9 | 8.65 × 10−4 | 4.38 × 10−2 | 4.80 × 10−5 | 1 | 3.57 × 10−7 | |
| h | 1 | 1 | 1 | 1 | 1 | 0 | 1 | |
| F7 | Worst | 4.08 × 103 | 1.00 × 104 | 1.01 × 104 | 1.41 × 102 | 1.12 × 103 | 5.47 × 10−2 | 2.21 × 10−2 |
| Average | 1.94 × 103 | 9.34 × 103 | 6.56 × 103 | 3.46 × 101 | 9.18 × 102 | 1.48 × 10−2 | 1.24 × 10−2 | |
| Best | 4.29 × 102 | 8.65 × 103 | 4.09 × 103 | 2.19 × 100 | 6.34 × 102 | 5.30 × 10−4 | 2.16 × 10−3 | |
| STD | 1.46 × 103 | 6.00 × 102 | 2.43 × 103 | 5.96 × 101 | 2.02 × 102 | 2.27 × 10−2 | 8.80 × 10−3 | |
| p-value | 1.77 × 10−2 | 5.07 × 10−10 | 3.15 × 10−4 | 2.31 × 10−1 | 7.61 × 10−6 | 1.00 × 100 | 8.30 × 10−1 | |
| h | 1 | 1 | 1 | 0 | 1 | 0 | 0 | |
| F8 | Worst | −7.26 × 103 | −3.51 × 103 | −6.05 × 103 | −4.99 × 104 | −6.34 × 103 | −2.84 × 104 | −2.42 × 104 |
| Average | −9.61 × 103 | −5.16 × 103 | −6.77 × 103 | −5.51 × 104 | −9.25 × 103 | −4.74 × 104 | −5.90 × 104 | |
| Best | −1.32 × 104 | −8.14 × 103 | −7.99 × 103 | −5.98 × 104 | −1.12 × 104 | −7.61 × 104 | −8.33 × 104 | |
| STD | 2.26 × 103 | 1.89 × 103 | 7.39 × 102 | 3.61 × 103 | 2.57 × 103 | 2.00 × 104 | 2.44 × 104 | |
| p-value | 3.00 × 10−3 | 1.54 × 10−3 | 1.90 × 10−3 | 4.20 × 10−1 | 2.88 × 10−3 | 1 | 4.34 × 10−1 | |
| h | 1 | 1 | 1 | 0 | 1 | 0 | 0 | |
| F9 | Worst | 2.42 × 103 | 3.24 × 103 | 2.57 × 103 | 1.98 × 103 | 2.20 × 103 | 3.14 × 10−6 | 0 |
| Average | 2.26 × 103 | 3.17 × 103 | 1.05 × 103 | 6.35 × 102 | 2.06 × 103 | 7.15 × 10−7 | 0 | |
| Best | 2.19 × 103 | 3.09 × 103 | 3.84 × 102 | 1.50 × 10−1 | 1.90 × 103 | 0 | 0 | |
| STD | 9.29 × 101 | 6.11 × 101 | 8.69 × 102 | 8.10 × 102 | 1.40 × 102 | 1.37 × 10−6 | 0 | |
| p-value | 1.44 × 10−11 | 3.38 × 10−14 | 2.69 × 10−2 | 1.18 × 10−1 | 8.01 × 10−10 | 1 | 2.76 × 10−1 | |
| h | 1 | 1 | 1 | 0 | 1 | 0 | 0 | |
| F10 | Worst | 2.00 × 101 | 1.86 × 101 | 2.09 × 101 | 0.472 × 10−1 | 1.83 × 101 | 1.18 × 10−4 | 8.88 × 10−16 |
| Average | 1.89 × 101 | 1.80 × 101 | 1.87 × 101 | 0.234 × 10−1 | 1.77 × 101 | 4.16 × 10−5 | 8.88 × 10−16 | |
| Best | 1.83 × 101 | 1.75 × 101 | 1.35 × 101 | 1.90 × 10−2 | 1.69 × 101 | 3.37 × 10−7 | 8.88 × 10−16 | |
| STD | 7.16 × 10−1 | 4.39 × 10−1 | 0.306 × 10−1 | 0.222 × 10−1 | 6.69 × 10−1 | 5.44 × 10−5 | 0.00 × 100 | |
| p-value | 7.67 × 10−12 | 2.27 × 10−13 | 7.94 × 10−7 | 4.59 × 10−2 | 7.59 × 10−12 | 1 | 1.26 × 10−1 | |
| h | 1 | 1 | 1 | 1 | 1 | 0 | 0 | |
| F11 | Worst | 2.11 × 103 | 2.46 × 103 | 3.12 × 103 | 1.82 × 102 | 1.27 × 103 | 5.67 × 10−6 | 0 |
| Average | 1.61 × 103 | 2.29 × 103 | 2.22 × 103 | 4.26 × 101 | 1.15 × 103 | 1.14 × 10−6 | 0 | |
| Best | 6.87 × 102 | 2.17 × 103 | 7.28 × 102 | 0.125 × 10−1 | 1.06 × 103 | 6.66 × 10−16 | 0 | |
| STD | 5.94 × 102 | 1.28 × 102 | 9.58 × 102 | 7.82 × 101 | 8.29 × 101 | 2.53 × 10−6 | 0 | |
| p-value | 3.06 × 10−4 | 1.65 × 10−10 | 8.50 × 10−4 | 2.58 × 10−1 | 1.30 × 10−9 | 1 | 3.46 × 10−1 | |
| h | 1 | 1 | 1 | 0 | 1 | 0 | 0 | |
| F12 | Worst | 9.71 × 108 | 8.83 × 107 | 6.94 × 109 | 3.29 × 107 | 5.27 × 108 | 2.75 × 10−2 | 0.347 × 10−1 |
| Average | 5.21 × 108 | 6.96 × 107 | 5.60 × 109 | 6.90 × 106 | 2.57 × 108 | 9.13 × 10−3 | 0.144 × 10−1 | |
| Best | 2.13 × 108 | 4.81 × 107 | 4.79 × 109 | 4.74 × 10−1 | 1.16 × 108 | 1.33 × 10−3 | 8.87 × 10−2 | |
| STD | 3.17 × 108 | 1.71 × 107 | 8.83 × 108 | 1.46 × 107 | 1.62 × 108 | 1.07 × 10−2 | 0.124 × 10−1 | |
| p-value | 6.24 × 10−3 | 1.71 × 10−5 | 5.97 × 10−7 | 3.20 × 10−1 | 7.54 × 10−3 | 1 | 3.26 × 10−2 | |
| h | 1 | 1 | 1 | 0 | 1 | 0 | 1 | |
| F13 | Worst | 1.62 × 109 | 5.92 × 108 | 1.29 × 1010 | 1.50 × 108 | 1.14 × 109 | 0.367 × 10−1 | 2.00 × 101 |
| Average | 1.19 × 109 | 3.66 × 108 | 1.04 × 1010 | 3.70 × 107 | 6.67 × 108 | 0.103 × 10−1 | 1.73 × 101 | |
| Best | 1.72 × 108 | 1.97 × 108 | 8.31 × 109 | 6.51 × 102 | 1.08 × 108 | 1.77 × 10−2 | 0.660 × 10−1 | |
| STD | 6.06 × 108 | 1.64 × 108 | 1.70 × 109 | 6.36 × 107 | 3.92 × 108 | 0.151 × 10−1 | 0.598 × 10−1 | |
| p-value | 2.27 × 10−3 | 1.07 × 10−3 | 8.07 × 10−7 | 2.29 × 10−1 | 5.23 × 10−3 | 1 | 3.63 × 10−4 | |
| h | 1 | 1 | 1 | 0 | 1 | 0 | 1 | |
| Fun. | Algorithm | ||||||
|---|---|---|---|---|---|---|---|
| PSO | WOA | SSA | SMA | HHO | AOA | AOACS | |
| F1 | 6 | 4 | 7 | 3 | 5 | 2 | 1 |
| F2 | 5 | 7 | 4 | 3 | 6 | 2 | 1 |
| F3 | 6 | 3 | 5 | 7 | 2 | 4 | 1 |
| F4 | 6 | 3 | 7 | 4 | 5 | 2 | 1 |
| F5 | 6 | 5 | 7 | 3 | 4 | 1 | 2 |
| F6 | 6 | 4 | 7 | 3 | 5 | 1 | 2 |
| F7 | 5 | 7 | 6 | 3 | 4 | 2 | 1 |
| F8 | 4 | 7 | 6 | 2 | 5 | 3 | 1 |
| F9 | 6 | 7 | 4 | 3 | 5 | 2 | 1 |
| F10 | 7 | 5 | 6 | 3 | 4 | 2 | 1 |
| F11 | 5 | 7 | 6 | 3 | 4 | 2 | 1 |
| F12 | 6 | 4 | 7 | 3 | 5 | 1 | 2 |
| F13 | 6 | 4 | 7 | 3 | 5 | 1 | 2 |
| Sum | 74 | 67 | 79 | 43 | 59 | 25 | 17 |
| Mean | 5.69 | 5.15 | 6.08 | 3.31 | 4.54 | 1.92 | 1.31 |
| Rank | 6 | 5 | 7 | 3 | 4 | 2 | 1 |
| Function | Measure | Algorithm | ||||||
|---|---|---|---|---|---|---|---|---|
| PSO | WOA | SSA | SMA | HHO | AOA | AOACS | ||
| CEC−1 | Best | 1.81 × 1012 | 6.00 × 1013 | 3.11 × 1012 | 4.03 × 108 | 1.78 × 1012 | 2.15 × 1011 | 1.61 × 106 |
| Average | 7.75 × 1011 | 2.19 × 1013 | 9.46 × 1011 | 8.10 × 107 | 7.64 × 1011 | 7.88 × 1010 | 6.70 × 105 | |
| Worst | 1.88 × 1011 | 2.95 × 1012 | 1.23 × 1011 | 7.83 × 104 | 6.40 × 1010 | 1.94 × 1010 | 1.36 × 105 | |
| STD | 6.72 × 1011 | 2.22 × 1013 | 1.23 × 1012 | 1.80 × 108 | 7.85 × 1011 | 8.00 × 1010 | 5.89 × 105 | |
| p-value | 3.27 × 10−2 | 5.87 × 10−2 | 1.24 × 10−1 | 1.00 × 100 | 6.13 × 10−2 | 5.91 × 10−2 | 3.48 × 10−1 | |
| h | 1 | 0 | 0 | 0 | 0 | 0 | 0 | |
| CEC−2 | Best | 1.54 × 103 | 3.00 × 104 | 1.43 × 102 | 1.82 × 101 | 8.88 × 103 | 1.96 × 102 | 1.93 × 101 |
| Average | 4.41 × 102 | 2.38 × 104 | 6.98 × 101 | 1.77 × 101 | 4.51 × 103 | 8.25 × 101 | 1.82 × 101 | |
| Worst | 3.97 × 101 | 1.56 × 104 | 1.97 × 101 | 1.74 × 101 | 6.72 × 102 | 3.02 × 101 | 1.75 × 101 | |
| STD | 6.27 × 102 | 7.27 × 103 | 5.72 × 101 | 3.29 × 10−1 | 3.31 × 103 | 6.79 × 101 | 7.53 × 10−1 | |
| p-value | 1.69 × 10−1 | 8.22 × 10−5 | 7.56 × 10−2 | 1 | 1.62 × 10−2 | 6.55 × 10−2 | 1.79 × 10−1 | |
| h | 0 | 1 | 0 | 0 | 1 | 0 | 0 | |
| CEC−3 | Best | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 |
| Average | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | |
| Worst | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | 1.27 × 101 | |
| STD | 1.33 × 10−3 | 5.29 × 10−4 | 9.19 × 10−4 | 3.52 × 10−4 | 2.78 × 10−3 | 1.74 × 10−3 | 1.12 × 10−3 | |
| p-value | 7.92 × 10−3 | 4.87 × 10−1 | 7.25 × 10−3 | 1.00 × 100 | 2.25 × 10−1 | 1.82 × 10−1 | 1.97 × 10−1 | |
| h | 1 | 0 | 1 | 0 | 0 | 0 | 0 | |
| CEC−4 | Best | 1.14 × 104 | 1.53 × 104 | 1.48 × 104 | 3.00 × 104 | 1.70 × 104 | 5.07 × 103 | 5.16 × 103 |
| Average | 8.61 × 103 | 1.10 × 104 | 9.93 × 103 | 1.73 × 104 | 1.24 × 104 | 4.18 × 103 | 3.84 × 103 | |
| Worst | 3.42 × 103 | 7.25 × 103 | 3.68 × 103 | 6.73 × 103 | 4.36 × 103 | 3.54 × 103 | 2.32 × 103 | |
| STD | 3.29 × 103 | 3.24 × 103 | 4.79 × 103 | 9.86 × 103 | 4.74 × 103 | 6.80 × 102 | 1.04 × 103 | |
| p-value | 9.96 × 10−2 | 2.15 × 10−1 | 1.73 × 10−1 | 1 | 3.46 × 10−1 | 1.81 × 10−2 | 1.64 × 10−2 | |
| h | 0 | 0 | 0 | 0 | 0 | 1 | 1 | |
| CEC−5 | Best | 0.521 × 10−1 | 0.466 × 10−1 | 0.787 × 10−1 | 0.666 × 10−1 | 0.973 × 10−1 | 0.324 × 10−1 | 0.359 × 10−1 |
| Average | 0.454 × 10−1 | 0.367 × 10−1 | 0.528 × 10−1 | 0.594 × 10−1 | 0.539 × 10−1 | 0.260 × 10−1 | 0.318 × 10−1 | |
| Worst | 0.400 × 10−1 | 0.265 × 10−1 | 0.336 × 10−1 | 0.528 × 10−1 | 0.336 × 10−1 | 0.200 × 10−1 | 0.200 × 10−1 | |
| STD | 4.89 × 10−1 | 8.49 × 10−1 | 0.189 × 10−1 | 5.94 × 10−1 | 0.262 × 10−1 | 5.09 × 10−1 | 6.68 × 10−1 | |
| p-value | 3.59 × 10−3 | 1.20 × 10−3 | 4.81 × 10−1 | 1 | 6.62 × 10−1 | 1.20 × 10−5 | 1.27 × 10−4 | |
| h | 1 | 1 | 0 | 0 | 0 | 1 | 1 | |
| CEC−6 | Best | 1.53 × 101 | 1.43 × 101 | 1.34 × 101 | 1.52 × 101 | 1.38 × 101 | 1.56 × 101 | 1.49 × 101 |
| Average | 1.42 × 101 | 1.31 × 101 | 1.23 × 101 | 1.33 × 101 | 1.21 × 101 | 1.38 × 101 | 1.27 × 101 | |
| Worst | 1.37 × 101 | 1.19 × 101 | 1.07 × 101 | 1.10 × 101 | 1.02 × 101 | 1.29 × 101 | 1.06 × 101 | |
| STD | 6.34 × 10−1 | 8.80 × 10−1 | 0.138 × 10−1 | 0.172 × 10−1 | 0.144 × 10−1 | 0.110 × 10−1 | 0.168 × 10−1 | |
| p-value | 3.24 × 10−1 | 7.87 × 10−1 | 3.38 × 10−1 | 1 | 2.52 × 10−1 | 6.52 × 10−1 | 5.91 × 10−1 | |
| h | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| CEC−7 | Best | 1.65 × 103 | 1.12 × 103 | 1.87 × 103 | 1.87 × 103 | 1.96 × 103 | 1.97 × 103 | 9.70 × 102 |
| Average | 1.53 × 103 | 8.71 × 102 | 1.56 × 103 | 1.33 × 103 | 1.47 × 103 | 1.37 × 103 | 6.03 × 102 | |
| Worst | 1.38 × 103 | 6.45 × 102 | 1.25 × 103 | 6.71 × 102 | 1.07 × 103 | 6.12 × 102 | 1.84 × 102 | |
| STD | 1.07 × 102 | 2.14 × 102 | 2.62 × 102 | 4.47 × 102 | 3.33 × 102 | 5.81 × 102 | 3.46 × 102 | |
| p-value | 3.72 × 10−1 | 7.04 × 10−2 | 3.58 × 10−1 | 1 | 6.04 × 10−1 | 9.18 × 10−1 | 2.03 × 10−2 | |
| h | 0 | 0 | 0 | 0 | 0 | 0 | 1 | |
| CEC−8 | Best | 0.816 × 10−1 | 0.757 × 10−1 | 0.840 × 10−1 | 0.764 × 10−1 | 0.769 × 10−1 | 0.795 × 10−1 | 0.781 × 10−1 |
| Average | 0.763 × 10−1 | 0.710 × 10−1 | 0.761 × 10−1 | 0.709 × 10−1 | 0.689 × 10−1 | 0.723 × 10−1 | 0.684 × 10−1 | |
| Worst | 0.703 × 10−1 | 0.622 × 10−1 | 0.658 × 10−1 | 0.581 × 10−1 | 0.614 × 10−1 | 0.676 × 10−1 | 0.615 × 10−1 | |
| STD | 4.54 × 10−1 | 5.13 × 10−1 | 7.60 × 10−1 | 7.38 × 10−1 | 5.77 × 10−1 | 4.67 × 10−1 | 6.32 × 10−1 | |
| p-value | 2.02 × 10−1 | 9.76 × 10−1 | 3.03 × 10−1 | 1 | 6.59 × 10−1 | 7.20 × 10−1 | 5.93 × 10−1 | |
| h | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| CEC−9 | Best | 2.05 × 103 | 2.19 × 103 | 3.55 × 103 | 3.92 × 103 | 3.73 × 103 | 3.15 × 103 | 7.79 × 102 |
| Average | 1.29 × 103 | 1.03 × 103 | 2.86 × 103 | 3.24 × 103 | 2.20 × 103 | 1.08 × 103 | 3.50 × 102 | |
| Worst | 4.92 × 102 | 2.60 × 102 | 2.35 × 103 | 1.55 × 103 | 4.66 × 102 | 5.46 × 101 | 6.60 × 101 | |
| STD | 5.84 × 102 | 7.93 × 102 | 5.24 × 102 | 9.72 × 102 | 1.19 × 103 | 1.26 × 103 | 3.01 × 102 | |
| p-value | 4.93 × 10−3 | 4.39 × 10−3 | 4.73 × 10−1 | 1 | 1.70 × 10−1 | 1.66 × 10−2 | 2.23 × 10−4 | |
| h | 1 | 1 | 0 | 0 | 0 | 1 | 1 | |
| CEC−10 | Best | 2.11 × 101 | 2.10 × 101 | 2.08 × 101 | 2.09 × 101 | 2.10 × 101 | 2.10 × 101 | 2.09 × 101 |
| Average | 2.08 × 101 | 2.08 × 101 | 2.07 × 101 | 2.07 × 101 | 2.07 × 101 | 2.09 × 101 | 2.06 × 101 | |
| Worst | 2.07 × 101 | 2.06 × 101 | 2.04 × 101 | 2.05 × 101 | 2.04 × 101 | 2.06 × 101 | 2.04 × 101 | |
| STD | 1.83 × 10−1 | 1.65 × 10−1 | 2.00 × 10−1 | 1.34 × 10−1 | 2.19 × 10−1 | 1.55 × 10−1 | 1.75 × 10−1 | |
| p-value | 2.45 × 10−1 | 2.53 × 10−1 | 6.77 × 10−1 | 1.00 × 100 | 7.75 × 10−1 | 1.37 × 10−1 | 3.06 × 10−1 | |
| h | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| Function | Algorithm | ||||||
|---|---|---|---|---|---|---|---|
| PSO | WOA | SSA | SMA | HHO | AOA | AOACS | |
| cec01 | 6 | 4 | 5 | 2 | 7 | 3 | 1 |
| cec02 | 3 | 6 | 5 | 1 | 7 | 4 | 2 |
| cec03 | 5 | 6 | 7 | 1 | 2 | 4 | 3 |
| cec04 | 4 | 6 | 3 | 7 | 5 | 2 | 1 |
| cec05 | 5 | 6 | 4 | 7 | 3 | 1 | 2 |
| cec06 | 2 | 1 | 7 | 5 | 4 | 6 | 3 |
| cec07 | 7 | 5 | 6 | 3 | 2 | 4 | 1 |
| cec08 | 6 | 2 | 7 | 3 | 4 | 5 | 1 |
| cec09 | 6 | 5 | 4 | 7 | 2 | 3 | 1 |
| cec10 | 2 | 3 | 6 | 4 | 5 | 7 | 1 |
| Sum | 46 | 44 | 54 | 40 | 41 | 39 | 16 |
| Mean | 4.6 | 4.4 | 5.4 | 4.0 | 4.1 | 3.9 | 1.6 |
| Rank | 6 | 5 | 7 | 3 | 4 | 2 | 1 |
| Algorithm | Optimal Estimated Values | Optimal Cost | |||
|---|---|---|---|---|---|
| HHO | 2.05 × 10−1 | 0.348 × 10−1 | 0.904 × 10−1 | 2.06 × 10−1 | 1.730 |
| AOA | 1.94 × 10−1 | 0.257 × 10−1 | 0.100 × 10−1 | 2.02 × 10−1 | 1.720 |
| WOA | 2.05 × 10−1 | 0.347 × 10−1 | 0.904 × 10−1 | 2.06 × 10−1 | 1.730 |
| SSA | 2.06 × 10−1 | 0.348 × 10−1 | 0.904 × 10−1 | 2.06 × 10−1 | 1.730 |
| PSO | 2.00 × 10−1 | 0.337 × 10−1 | 0.901 × 10−1 | 2.07 × 10−1 | 1.710 |
| SMA | 2.08 × 10−1 | 0.323 × 10−1 | 0.899 × 10−1 | 2.08 × 10−1 | 1.700 |
| AOACS | 1.96 × 10−1 | 0.335 × 10−1 | 0.904 × 10−1 | 2.06 × 10−1 | 1.690 |
| Algorithm | Optimal Estimated Values | Lowest Weight | |
|---|---|---|---|
| HHO | 7.8867 × 10−1 | 4.0828 × 10−1 | 2.6390 × 102 |
| AOA | 7.9369 × 10−1 | 3.9426 × 10−1 | 2.6392 × 102 |
| WOA | 7.8866 × 10−1 | 4.0828 × 10−1 | 2.6390 × 102 |
| SSA | 7.8860 × 10−1 | 4.0845 × 10−1 | 2.6390 × 102 |
| PSO | 7.8867 × 10−1 | 4.0826 × 10−1 | 2.6390 × 102 |
| SMA | 7.8890 × 10−1 | 4.0762 × 10−1 | 2.6390 × 102 |
| AOACS | 7.8859 × 10−1 | 4.0825 × 10−1 | 2.6387 × 102 |
| Algorithm | Optimal Estimated Values | Lowest Weight | ||||
|---|---|---|---|---|---|---|
| HHO | 0.513 × 10−1 | 0.562 × 10−1 | 0.510 × 10−1 | 0.393 × 10−1 | 0.232 × 10−1 | 0.138 × 10−1 |
| AOA | 0.621 × 10−1 | 0.621 × 10−1 | 0.621 × 10−1 | 0.621 × 10−1 | 0.621 × 10−1 | 0.194 × 10−1 |
| WOA | 0.600 × 10−1 | 0.530 × 10−1 | 0.449 × 10−1 | 0.351 × 10−1 | 0.217 × 10−1 | 0.134 × 10−1 |
| SSA | 0.561 × 10−1 | 0.496 × 10−1 | 0.566 × 10−1 | 0.320 × 10−1 | 0.320 × 10−1 | 0.141 × 10−1 |
| PSO | 0.605 × 10−1 | 0.526 × 10−1 | 0.451 × 10−1 | 0.346 × 10−1 | 0.219 × 10−1 | 0.134 × 10−1 |
| SMA | 0.511 × 10−1 | 0.599 × 10−1 | 0.502 × 10−1 | 0.371 × 10−1 | 0.327 × 10−1 | 0.144 × 10−1 |
| AOACS | 0.601 × 10−1 | 0.531 × 10−1 | 0.449 × 10−1 | 0.350 × 10−1 | 0.215 × 10−1 | 0.134 × 10−1 |
| Algorithm | Optimal Estimated Values | Lowest Weight | ||||||
|---|---|---|---|---|---|---|---|---|
| HHO | 3.606129 | 0.7 | 17 | 7.2 | 7.98141 | 3.462569 | 5.296749 | 3028.873076 |
| AOA | 3.5 | 0.7 | 17 | 7.2 | 7.680396 | 3.552421 | 5.255814 | 3020.583365 |
| WOA | 3.518765 | 0.7 | 17 | 7.2 | 7.9 | 3.45102 | 5.299213 | 3031.563 |
| SSA | 3.530134 | 0.7 | 17 | 8.36 | 7.9 | 3.37697 | 5.298719 | 3030.002 |
| PSO | 3.537485 | 0.7002 | 17 | 7.729684 | 8.090954 | 3.361512 | 5.297051 | 3011.137492 |
| SMA | 3.526152 | 0.700005 | 17 | 7.559136 | 7.95833 | 3.375576 | 5.299773 | 3009.08 |
| AOACS | 3.5032 | 0.7 | 17 | 7.2198 | 7.7375 | 3.3741 | 5.2994 | 3007.7328 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hijjawi, M.; Alshinwan, M.; Khashan, O.A.; Alshdaifat, M.; Almanaseer, W.; Alomoush, W.; Garg, H.; Abualigah, L. Accelerated Arithmetic Optimization Algorithm by Cuckoo Search for Solving Engineering Design Problems. Processes 2023, 11, 1380. https://doi.org/10.3390/pr11051380
Hijjawi M, Alshinwan M, Khashan OA, Alshdaifat M, Almanaseer W, Alomoush W, Garg H, Abualigah L. Accelerated Arithmetic Optimization Algorithm by Cuckoo Search for Solving Engineering Design Problems. Processes. 2023; 11(5):1380. https://doi.org/10.3390/pr11051380
Chicago/Turabian StyleHijjawi, Mohammad, Mohammad Alshinwan, Osama A. Khashan, Marah Alshdaifat, Waref Almanaseer, Waleed Alomoush, Harish Garg, and Laith Abualigah. 2023. "Accelerated Arithmetic Optimization Algorithm by Cuckoo Search for Solving Engineering Design Problems" Processes 11, no. 5: 1380. https://doi.org/10.3390/pr11051380
APA StyleHijjawi, M., Alshinwan, M., Khashan, O. A., Alshdaifat, M., Almanaseer, W., Alomoush, W., Garg, H., & Abualigah, L. (2023). Accelerated Arithmetic Optimization Algorithm by Cuckoo Search for Solving Engineering Design Problems. Processes, 11(5), 1380. https://doi.org/10.3390/pr11051380