1. Introduction
In recent years, China’s auto industry has developed rapidly. It has now become the largest auto producer and consumer of the world, and its market position in the international auto market pattern has progressively improved [
1]. However, at the same time, the energy and environmental crises are becoming increasingly severe. China is the world’s largest oil importer and has a strong dependence on oil [
2]. China relies on oil imports to meet its people’s needs [
3]. In addition, the environmental pollution caused by conventional fuel vehicles is irreversible [
4,
5]. Therefore, China and even the world are studying the development of new energy vehicles.
As a new energy vehicle, the fundamental energy source of pure electric cars is electricity [
6]. Compared with traditional fuel vehicles, pure electric automobiles not only have no fuel cost in the driving process, but can also achieve zero exhaust emissions [
7]. Electric automobile development has become the top precedence for the automotive industry [
8]. At present, pure electric vehicles have made significant breakthroughs in technology. However, the industry still faces huge challenges in terms of technology, industry chain, and social factors, which need further enhancement and solutions [
9]. The traditional electric vehicle transmission form has disadvantages such as a fairly complex chassis structure, a relatively small space inside the vehicle, large size, low transmission efficiency and complicated control.
Hydraulic hybrid systems are also available for energy recovery. A hydraulic hybrid vehicle uses a high-pressure fluid as an alternative to electric current to drive the vehicle. Substantial numbers of scholars have studied hydraulic hybrid power systems. Zhao proposed a novel multi-working mode hydraulic/electric synergistic power system in the study of new energy vehicles. The dual planetary gear set regulates the three energy sources for optimal performance. Forward simulation models for the above four vehicles were also developed on the MATLAB/Simulink/Driveline platform, and fuel economy simulations associated with the Chinese urban bus cycle were performed in this model. One approach is provided to select the optimal solution for hybrid vehicles [
10]. Sun proposed a parallel hydraulic hybrid power system energy-saving scheme for the frequent start/stop operation characteristics of the loader, and designed a regenerative braking strategy and an energy recovery strategy. The logic threshold method is used to establish an energy controller to control the dynamic conversion between various operation modes, which improved the working performance of the loader and effectively decreased the fuel consumption [
11]. Meng designed a power system combined with a hydraulic pump, simulated and modeled it using AMESim and Simulink, and analyzed its performance [
12]. The results show how an adaptive combination of the hydraulic system and battery system in an electro-hydraulic hybrid automobile can effectively enhance the vehicle’s economic performance while ensuring the dynamic performance of the vehicle. A more efficient technical concept is proposed for the future development of hybrid vehicles.
An increasing number of articles have been published in current years to simulate and control electro-hydraulic hybrid vehicles.
Table 1 presents the main literature on the subject. Numerous scholars constructed and simulated the simulation model and compared it with a conventional vehicle. The results indicated that the economy and power of the vehicle could be extended. However, some particular parameter values of the simulation model are only initially determined, which may not be able to optimize the vehicle performance. Liu designed an electro-hydraulic hybrid system with a control strategy for coordinating different operating modes, which greatly reduces power consumption and peak motor power shocks and has broad application prospects [
13]. Yang proposed a new electromechanical–hydraulic power coupling transmission system [
14]. Combining a conventional motor with a hydraulic pump/motor to achieve the mutual conversion of electrical energy, mechanical energy, and hydraulic energy, the energy utilization rate was significantly improved, and the battery energy consumption rate was significantly reduced. The transmission system has a better energy efficiency, stability, and economy, which can provide a good reference for developing an electro-hydraulic system. Hwang designed a hydraulic electric hybrid vehicle (HEHV) and discussed the simulation’s energy management control strategy [
15]. The rule-based control strategy is modified using a genetic algorithm to improve the electric economy of the vehicle. The electricity economic performance of the designed hydraulic hybrid vehicle was enhanced by 36.51% compared to that of a pure electric vehicle. Hong modeled a new machine-electric-hydraulic coupled electric vehicle and proposed an electro-hydraulic ratio allocation method for different operating modes, which effectively solved the optimal energy management strategy for hybrid vehicles [
16]. The development and application of hybrid drivetrain systems for electric vehicles have been promoted.
Research into electro-hydraulic integrated power drive systems still face quite a few challenges. Existing rule-based control strategies have some inherent deficiencies and do not guarantee optimal parameter matching. This article only optimized the five most important sets of parameters and cannot guarantee the maximum efficiency of the car. Other parameters need to be further optimized in order to enhance the steadiness performance of the system.
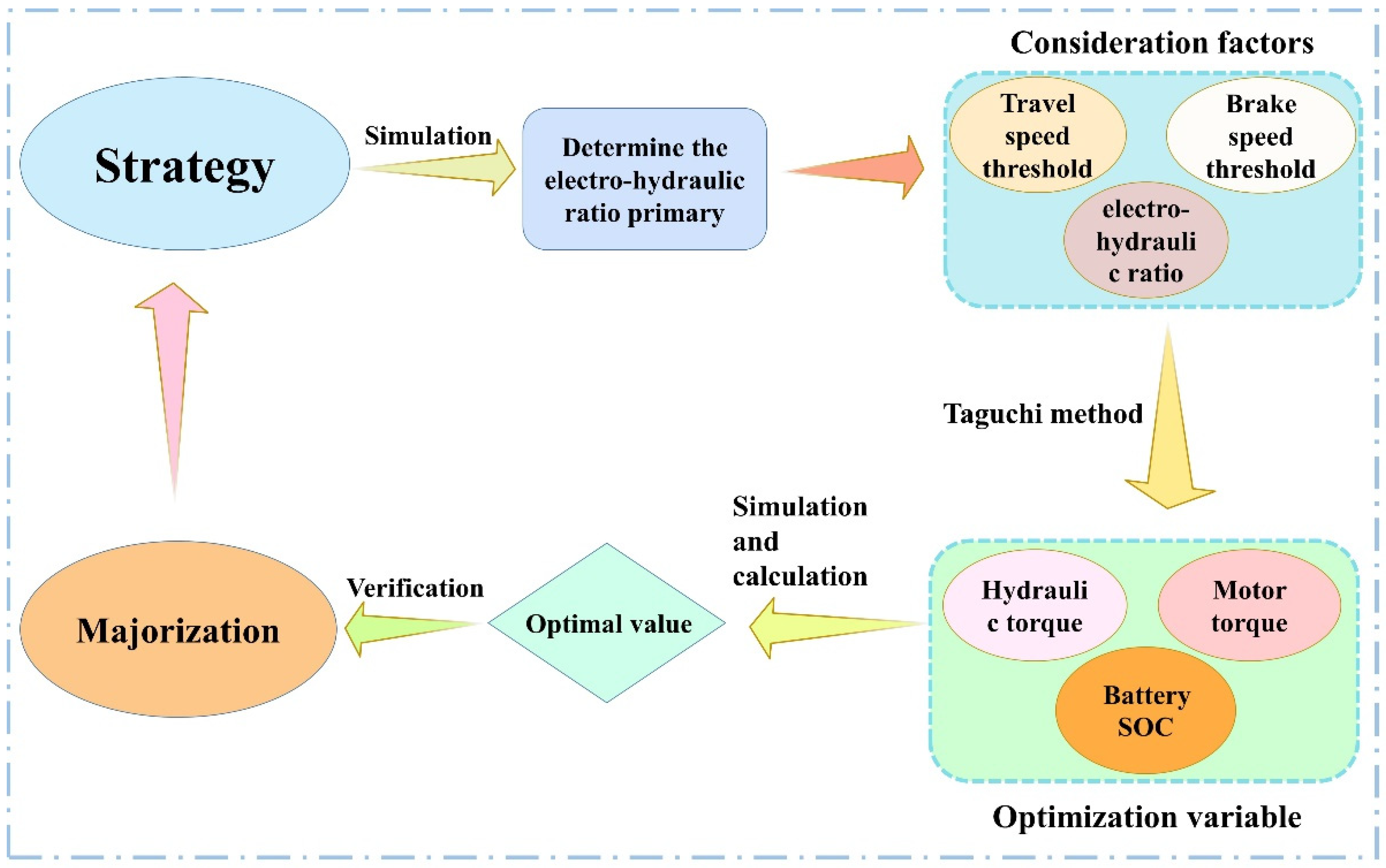
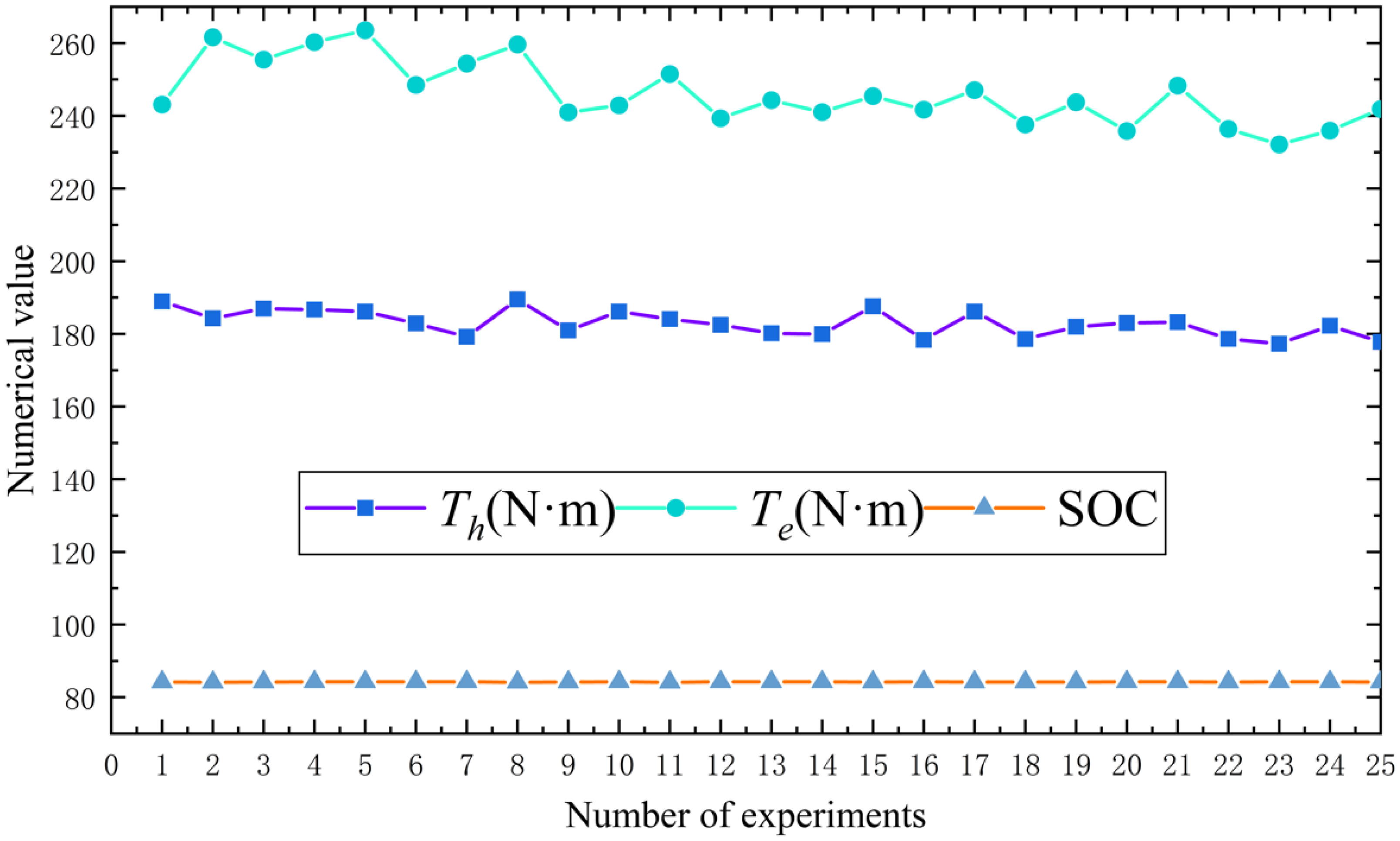
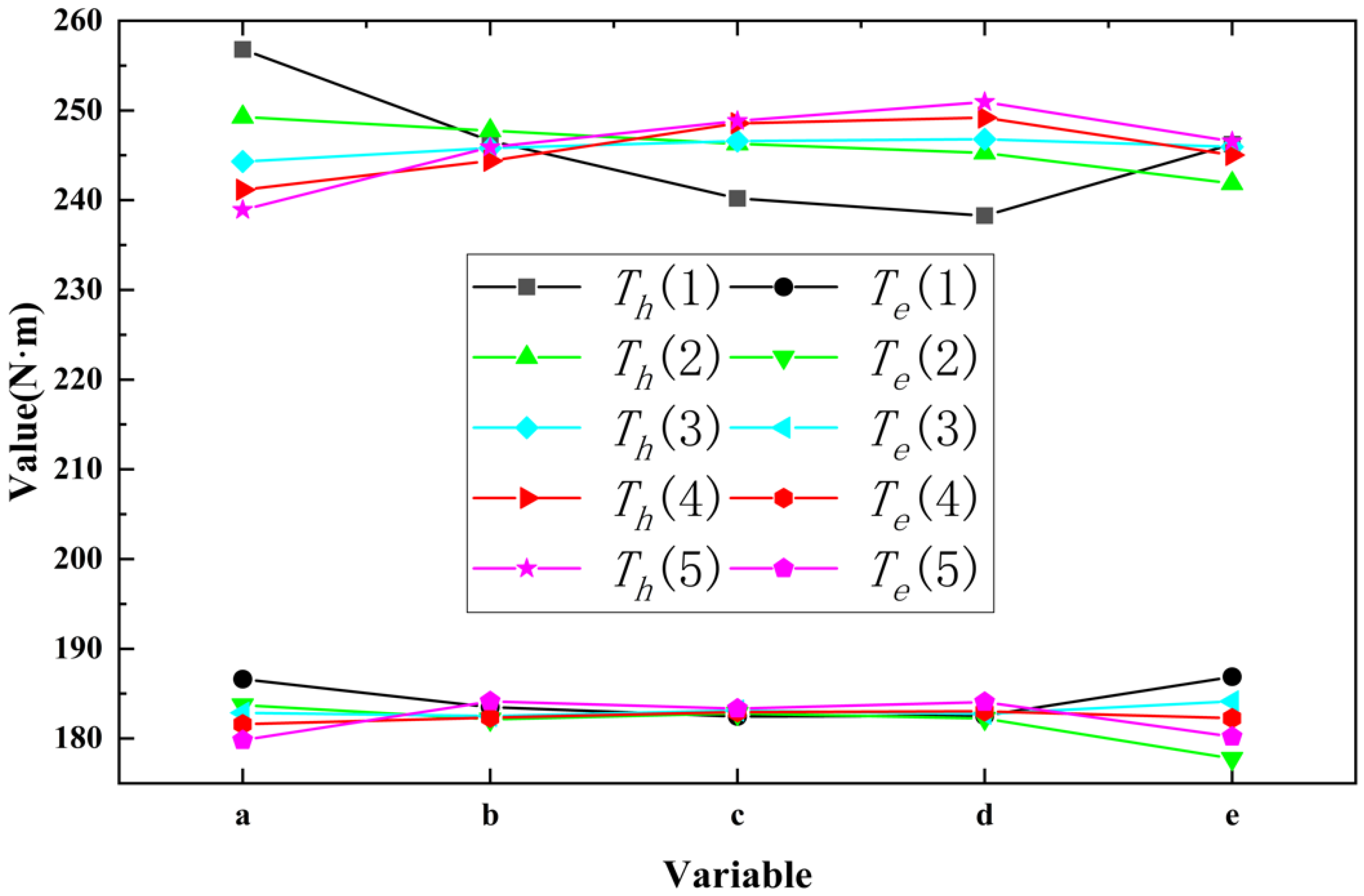
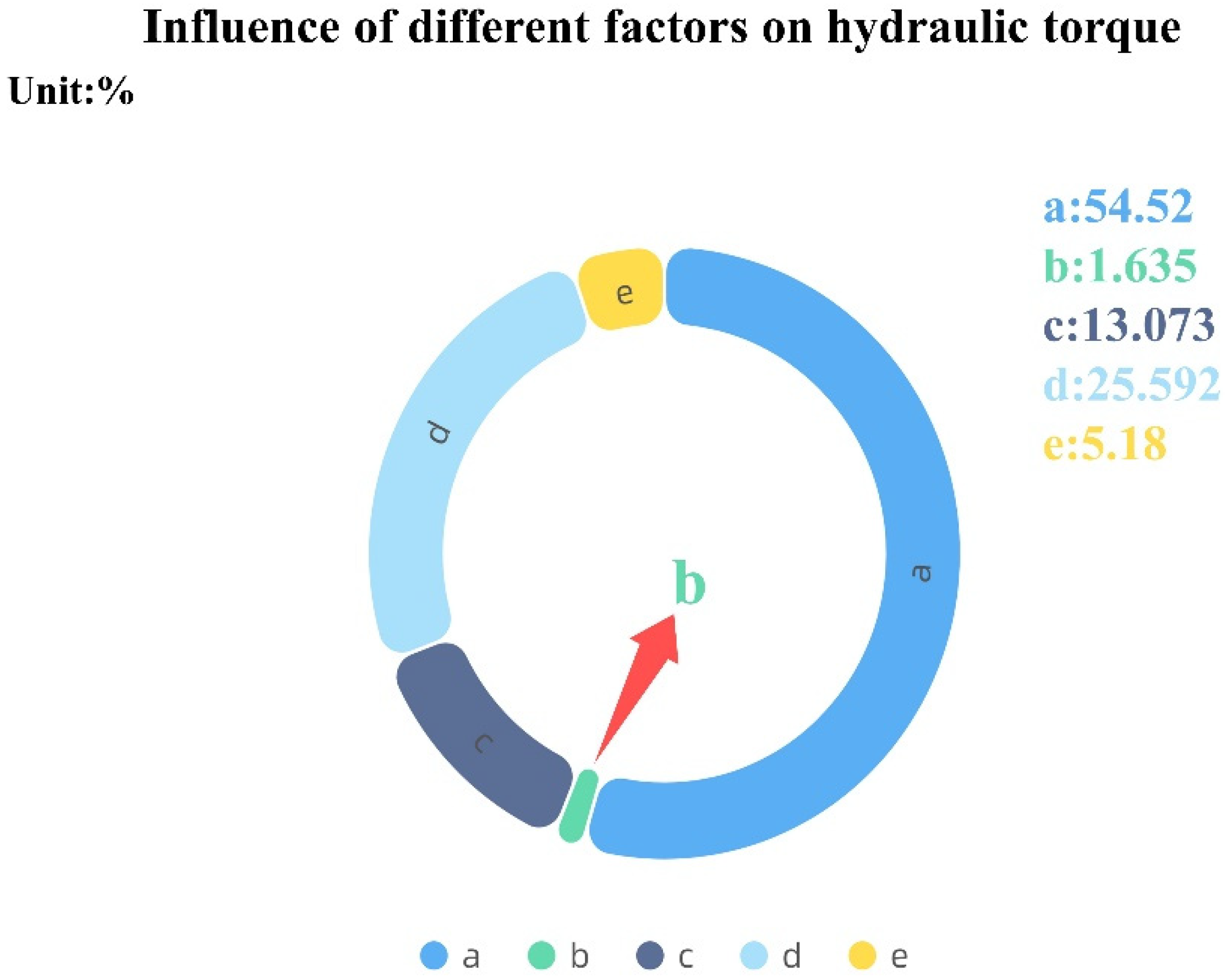
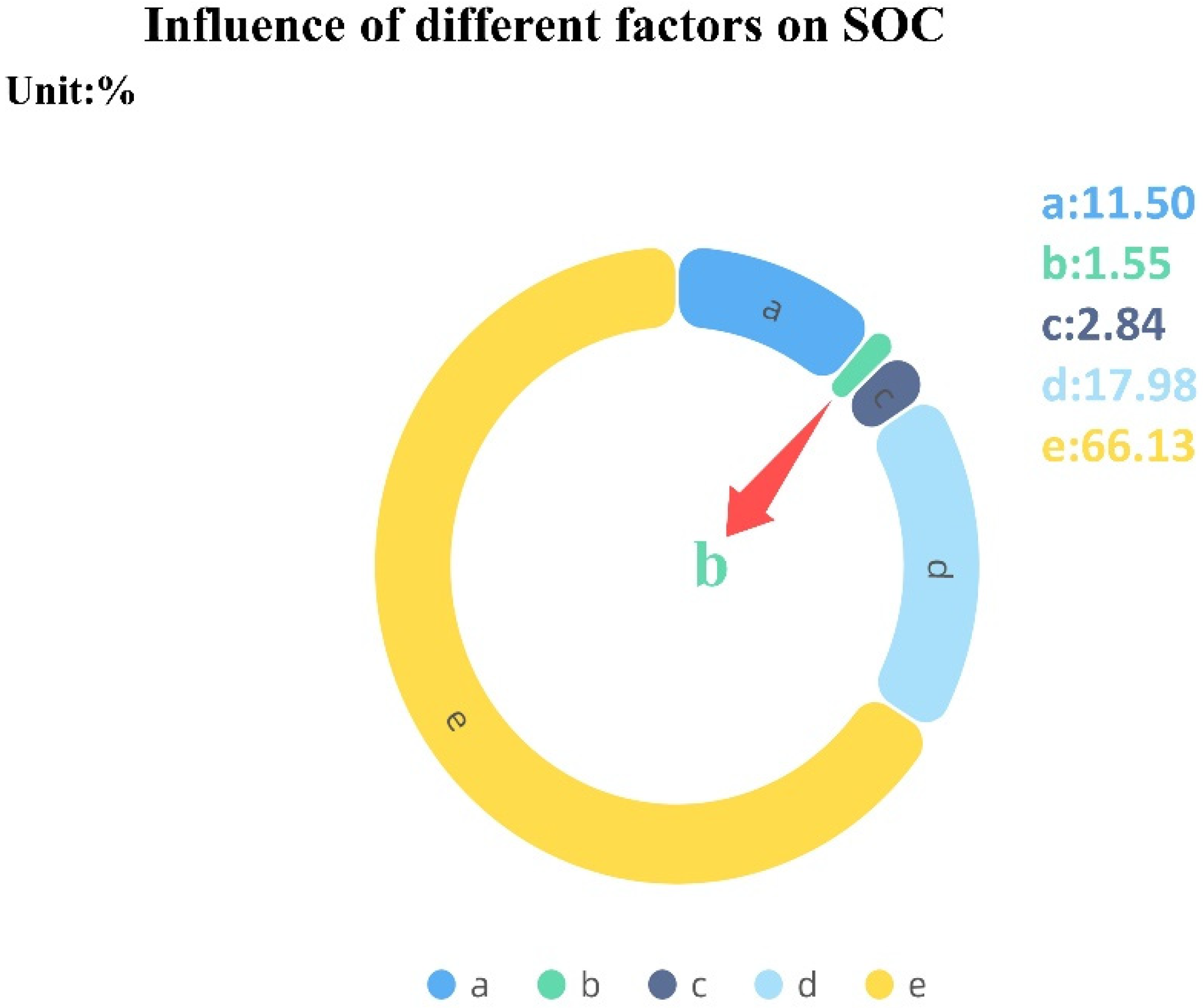
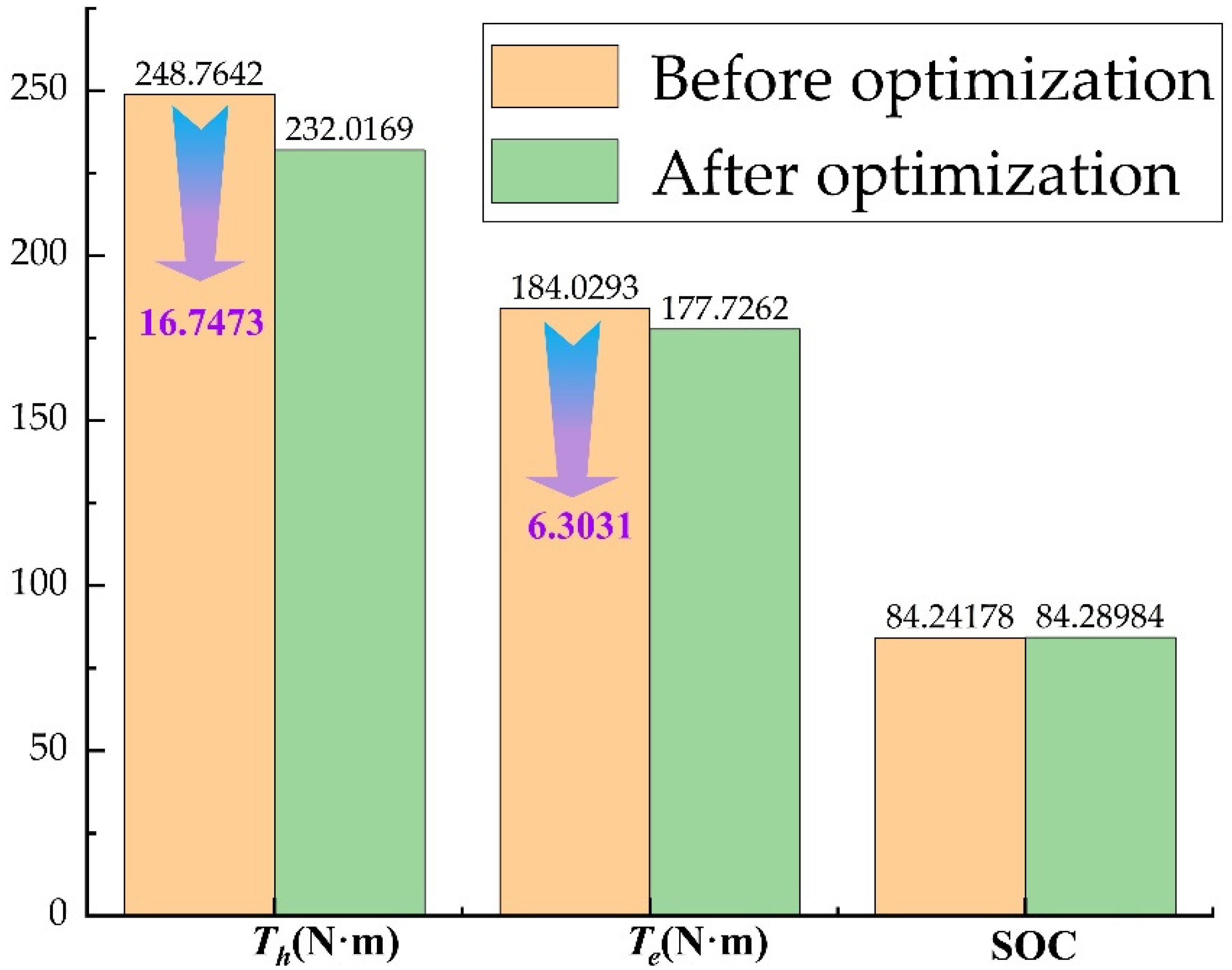
This paper explains the magnitude and direction of electro-hydraulic power participation under various operating conditions. The power reference characteristics of the electro-hydraulic power integrated drive system under various operating conditions are studied, and the appropriate initial electro-hydraulic ratio values are derived with the aid of setting different electro-hydraulic ratios for joint simulation analysis. The Taguchi method establishes an orthogonal test table of the velocity threshold and electro-hydraulic ratio values under starting and braking conditions. The simulation experiment obtained the motor peak torque, hydraulic peak torque and battery SOC value, and obtained the mean and variance of the three. The degree of influence of the input variables on the three performance indicators is analyzed, and the optimal parameter combination values are selected and substituted into the model for simulation verification.
3. Model and Control Strategies
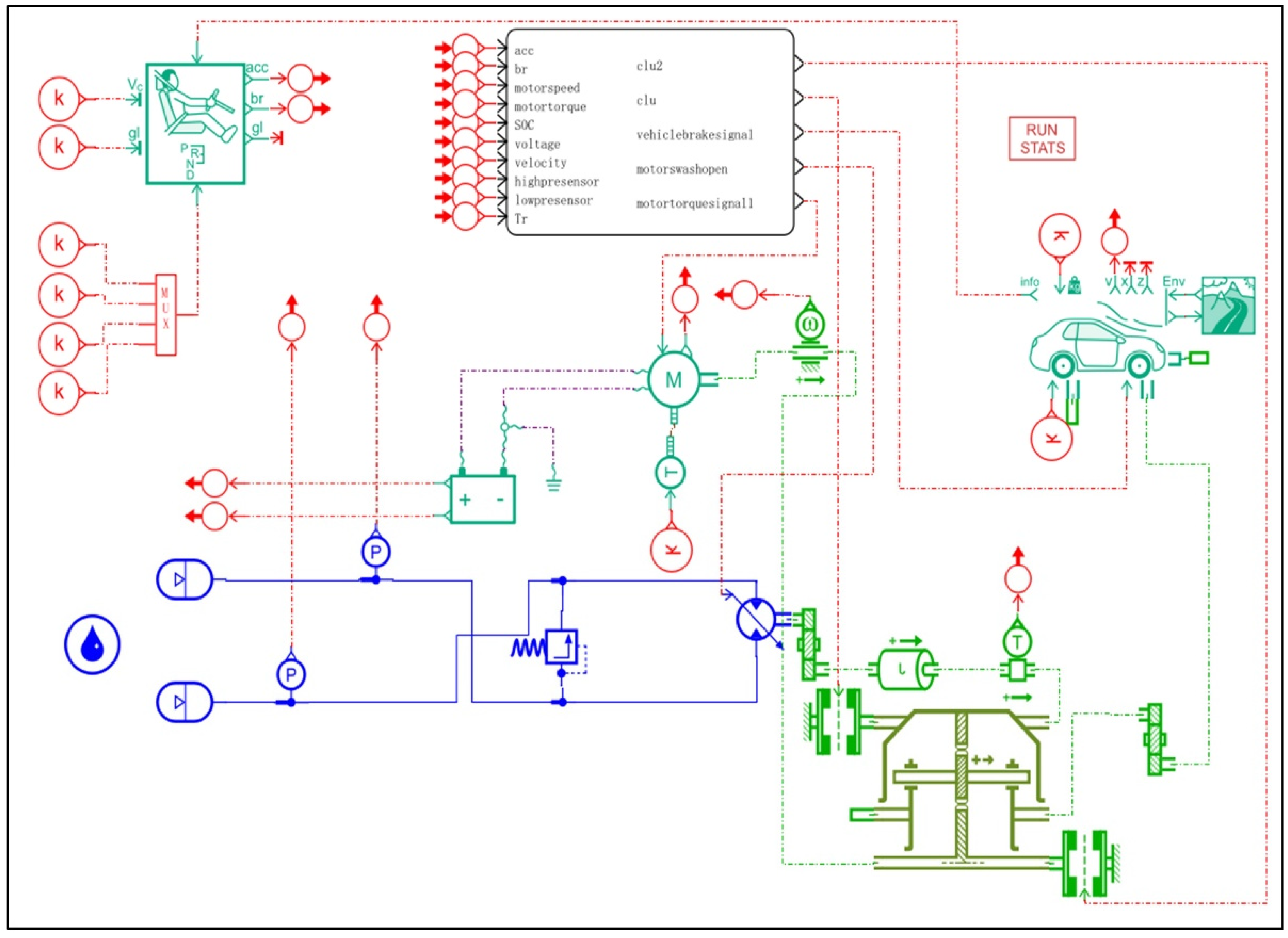
The integrated drive system is modeled and simulated by AMESim. The AMESim model is given in
Figure 5. The foremost parameters are presented in
Table 2. This article establishes a joint simulation interface by embedding a rule-based management strategy in Simulink. The multi-modal energy management control is implemented via the Stateflow module, taking full advantage of the superiorities of both software in terms of modelling and data processing.
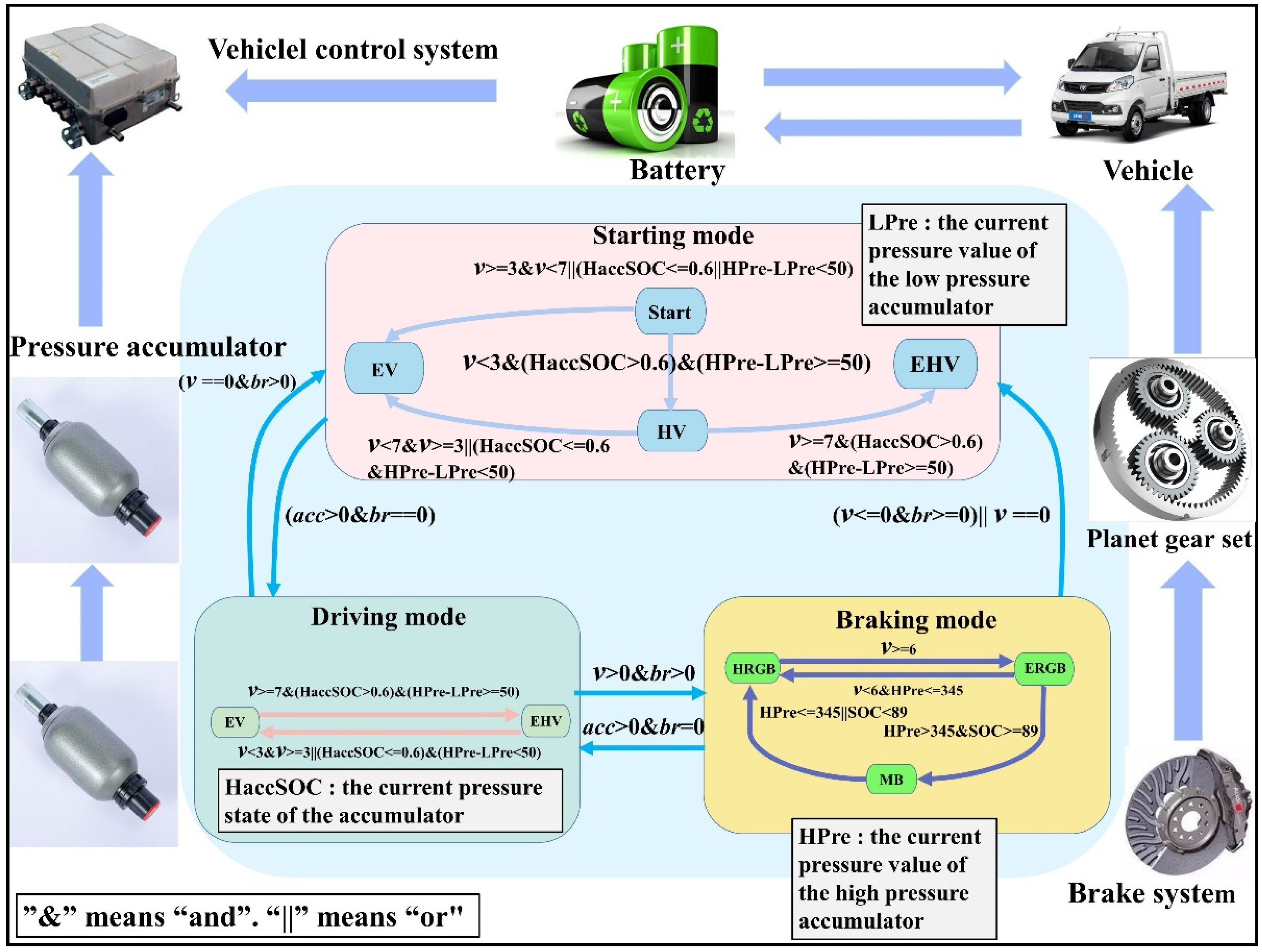
The vehicle energy management strategy is proven in
Figure 6. When the acceleration control signal of the automobile is greater than 0, the vehicle is in the starting working state. The control system will choose different working modes according to the set threshold value, and the set threshold value of the accumulator is 50 MPa.
Table 3 describes in detail the conditions for conversion between modes.
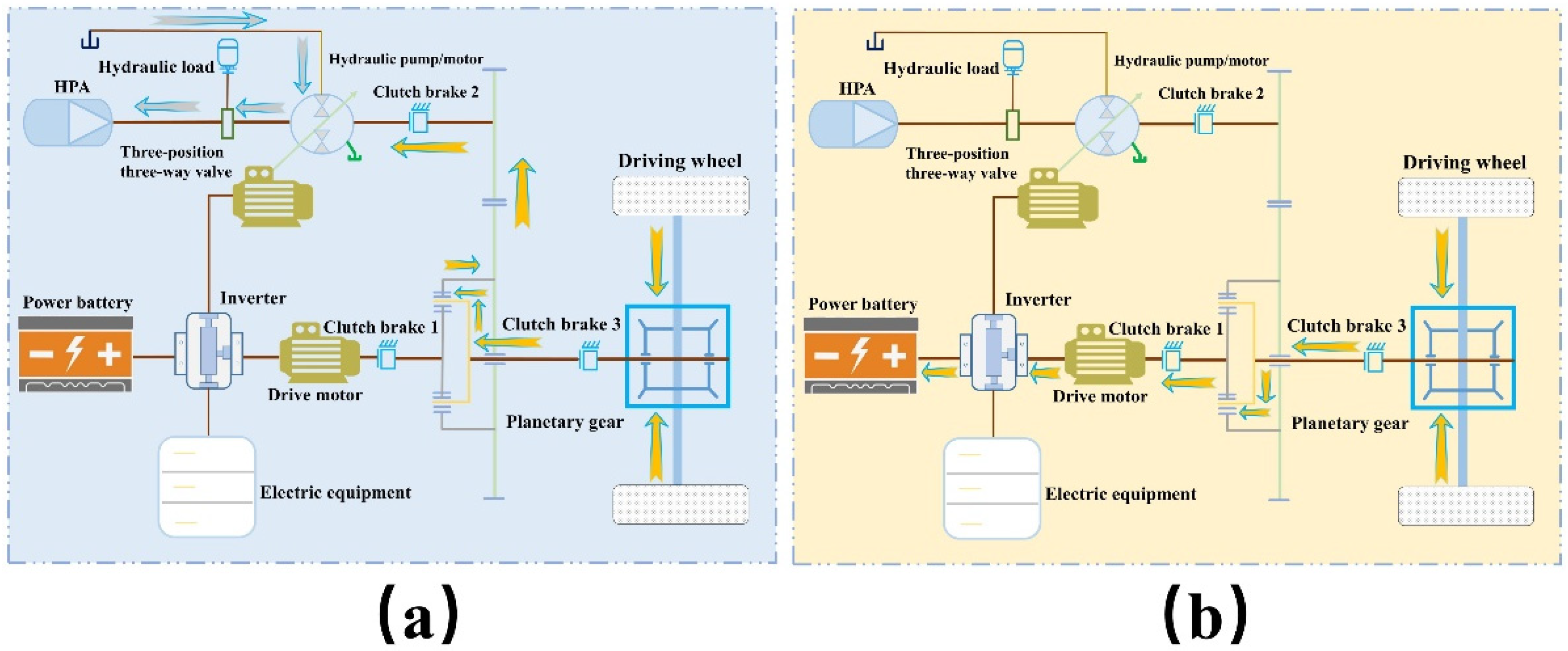
Assuming that the detected velocity signal is less than or equal to the set low-velocity threshold and the distinction between the high-and low-pressure accumulators is higher than or equal to 50 MPa. In that case, the vehicle will enter the hydraulic starting mode. When the driving speed is low and the hydraulic pressure of the high-pressure accumulator is sufficient, the drive system can be started using hydraulic pressure. The hydraulic system is involved in the work, and the electric system is not engaged. If the accumulator pressure difference is less than 50 MPa, the vehicle enters the pure electric drive mode. The battery provides power for vehicle driving, while the hydraulic system does not work.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}