

Modifying Sequential Monte Carlo Optimisation for Index Tracking to Allow for Transaction Costs


Abstract
1. Introduction
2. Preliminaries
2.1. The Index Tracking Problem
Optimisation Problem as Sampling Problem
2.2. Sequential Monte Carlo Sampling
2.2.1. Sequential Importance Sampling
2.2.2. Resampling
2.2.3. Support Boosting and Metropolis–Hastings Algorithm
Summary of SMC Algorithm
- Fix the number of stocks used to replicate the index to p (using PCA).
- Draw n permutations of size p from , for computed as in Equation (9). Set the importance weights for each permutation to .
- Choose and increment such that .
- At , compute the importance weights for each permutation using recursive formulas in Section 2.2.1.
- Compute ESS
- While ,
- (a)
- If ESS proceed to Step 3.
- (b)
- If ESS . Resample the particles (Satpathy and Shah (2022)) suggest that if support boosting is applied, initialise MH with an accumulative acceptance rate of 500%).
- (c)
- Set the weights of new samples computed in MH to and proceed to Step 3.
- At , samples from are obtained, represented as pairs of permutations and their respective weights.
- Resample once more to obtain new permutations with equal weights.
- Compute for the new sample of permutations to obtain the optimal that maximises the given by Equation (8).
3. Transaction Costs
3.1. Dynamics of the Wealth Process Given Proportional Transaction Costs
3.2. Index Tracking Problem with Proportional Transaction Costs
4. Methodology and Data
4.1. Model Cases
4.2. Constraints and Optimisation
4.3. Data
4.3.1. Simulated Data
4.3.2. Empirical Data
4.4. Metrics
4.4.1. Tracking Error
4.4.2. Total Transaction Costs
4.4.3. Wealth Error
4.4.4. Other Cost Metrics
4.4.5. Retention
4.4.6. Maximum Weight
5. Results and Discussion
5.1. Tracking Error
5.2. Total Cost
5.3. Retention
6. Conclusions
Opportunities for Further Study
- Considering the market impact, as it can also lead to additional losses when working with large volumes. Hence, investors should come up with smart order routing algorithms to optimise trade execution and reduce market impact. These algorithms can help split large orders into smaller ones and execute them in a way that minimises the price impact.
- Considering liquidity screening to avoid investing in assets that may have high transaction costs or are illiquid, as these can significantly impact the performance of your tracking strategy.
- Considering short sales so one can also track “short” indices, as well as considering the short position, i.e., negative ’s, which will relax the constraints in the proposed method.
- Considering other types of transaction costs: tiered commissions, fixed-plus-percentage commissions, flat-fee commissions.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
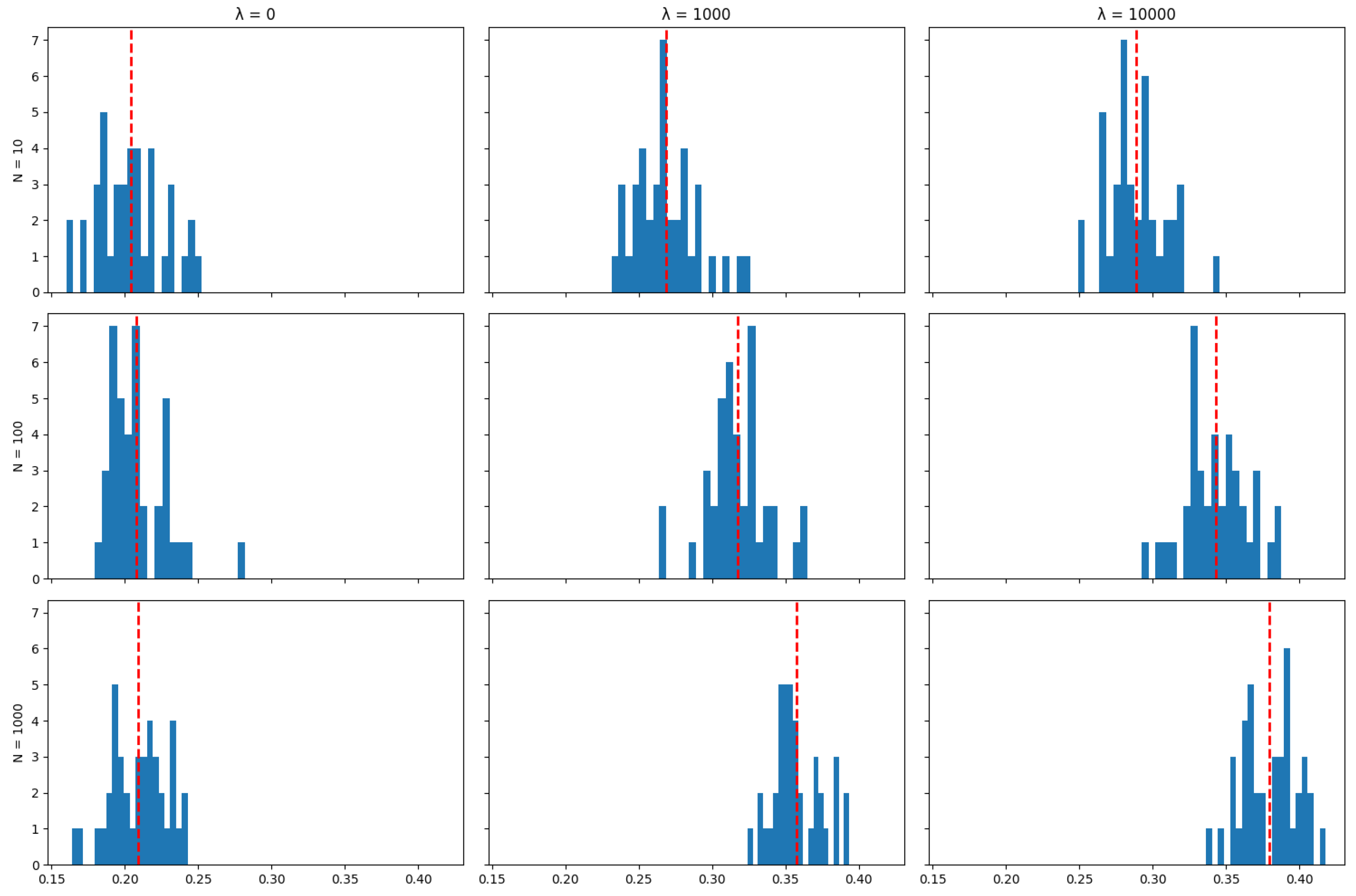
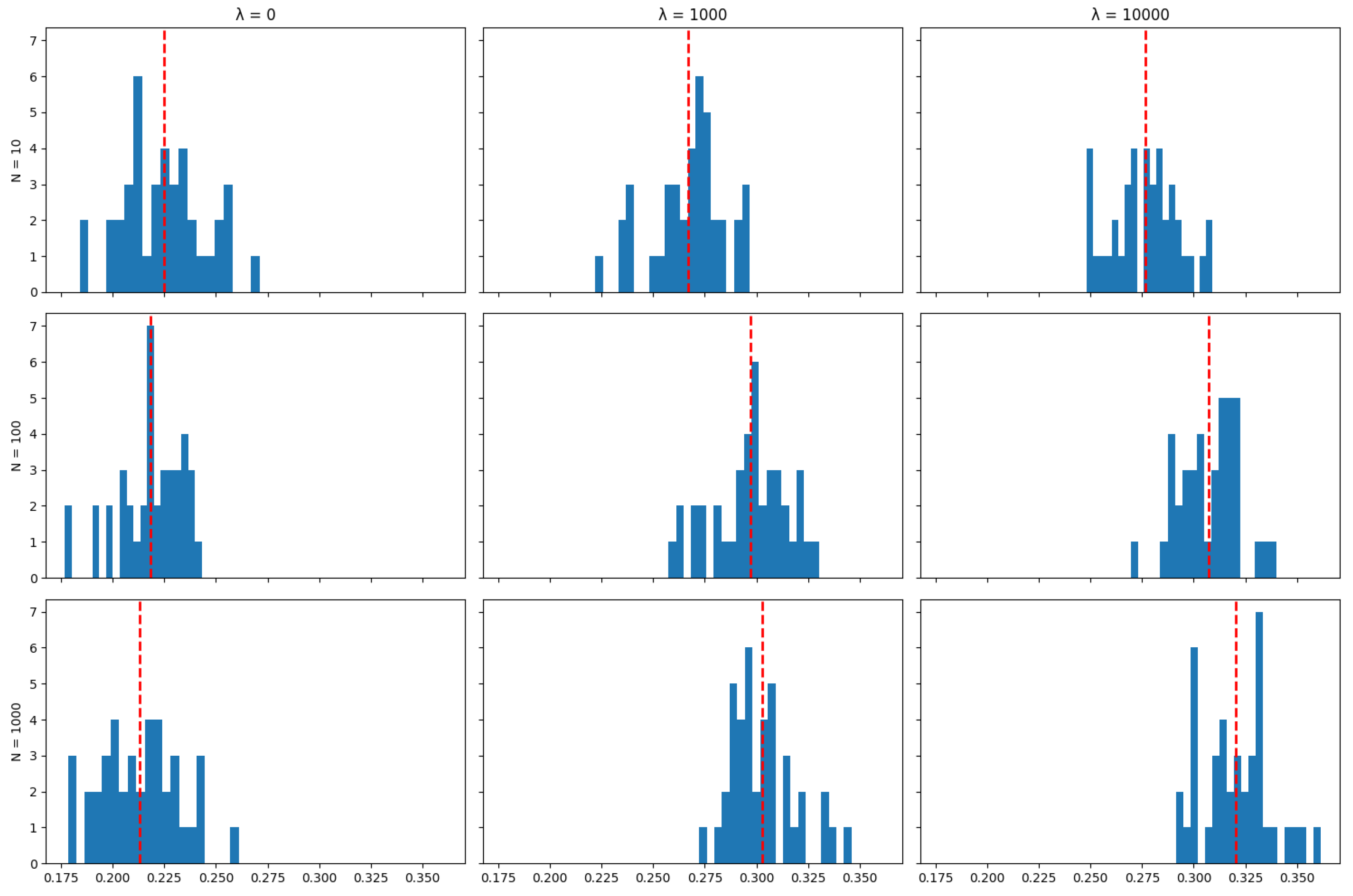
Appendix A.1. Tracking Performance





Appendix A.2. Transaction Costs
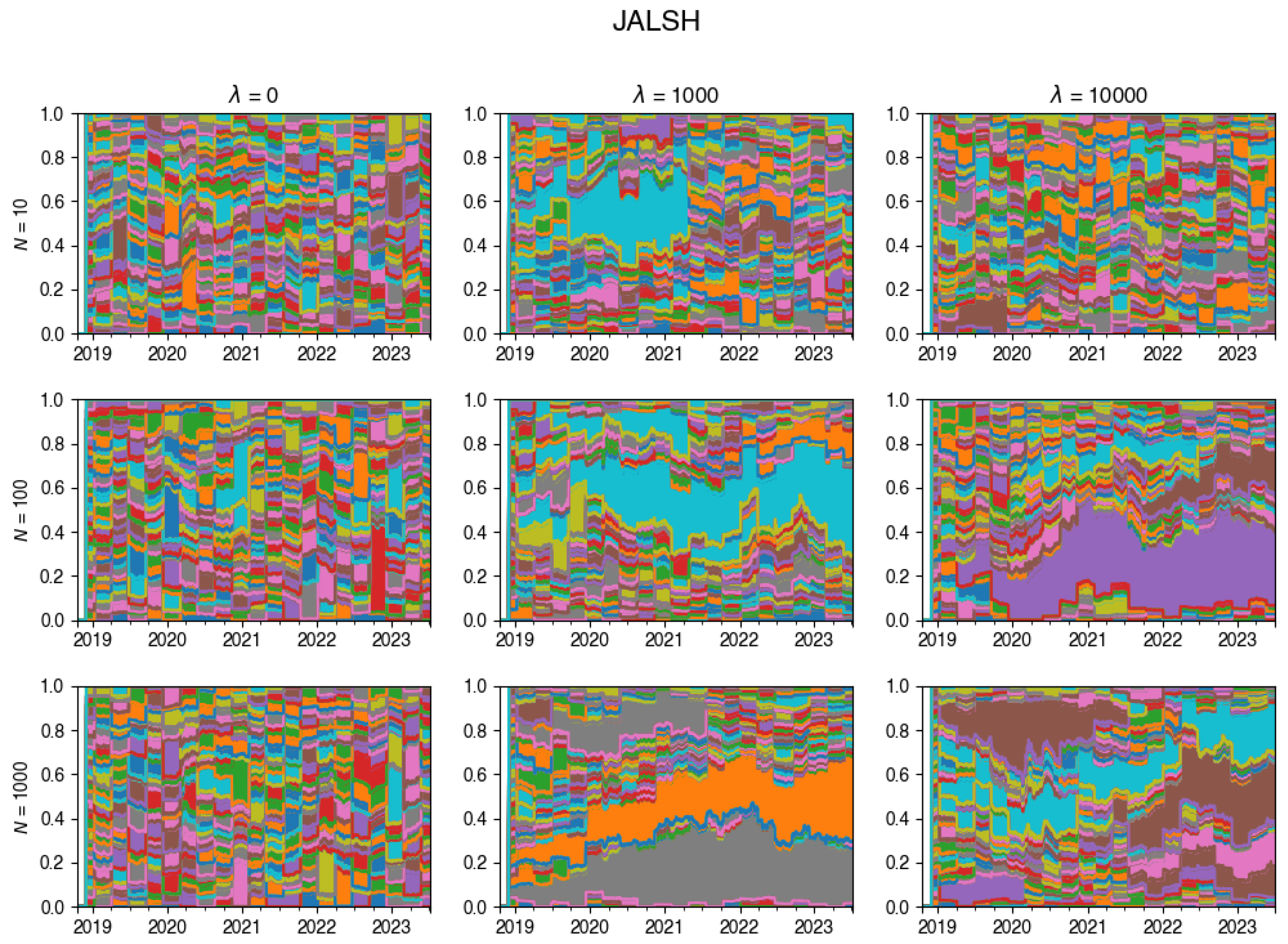
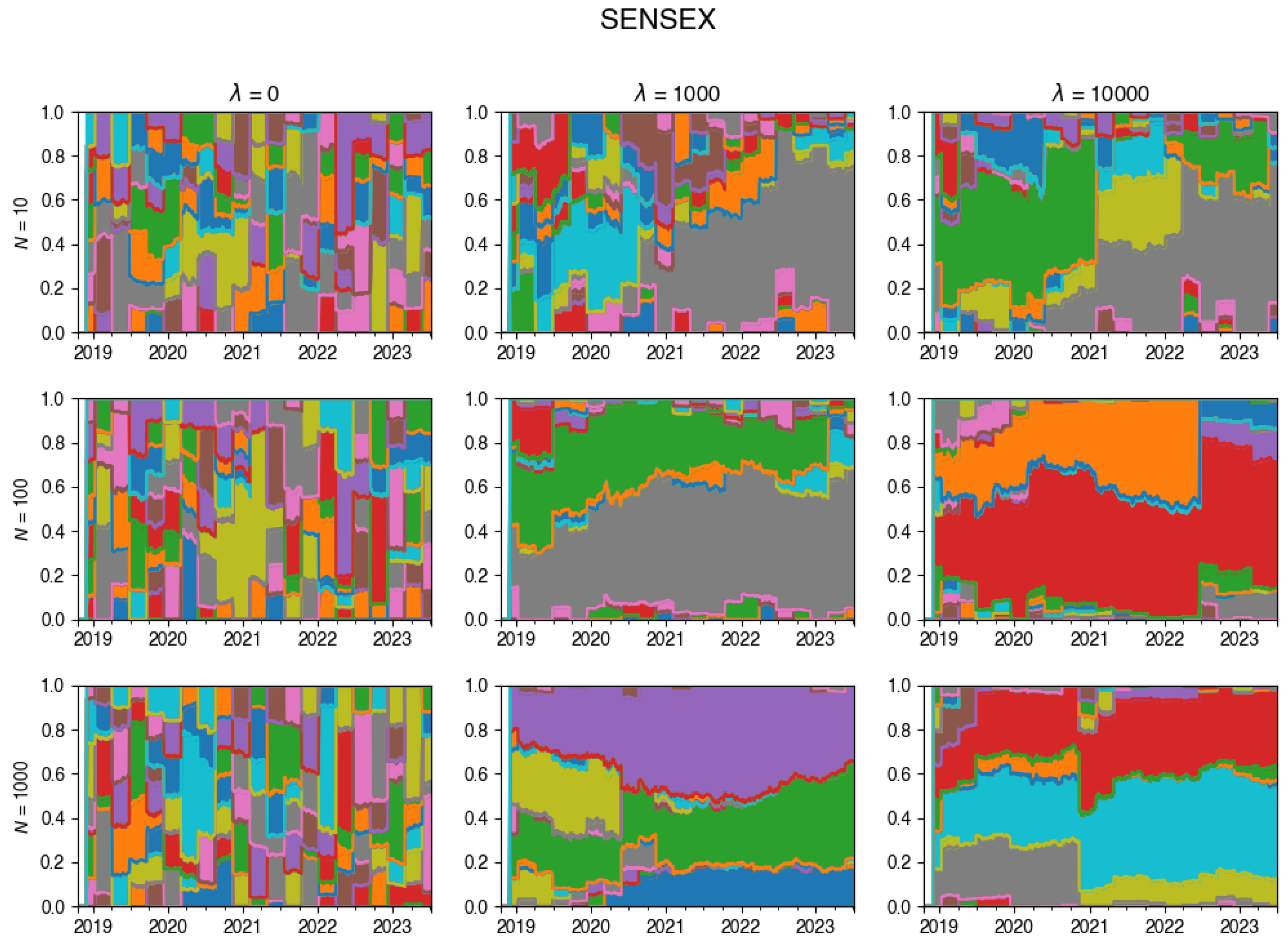
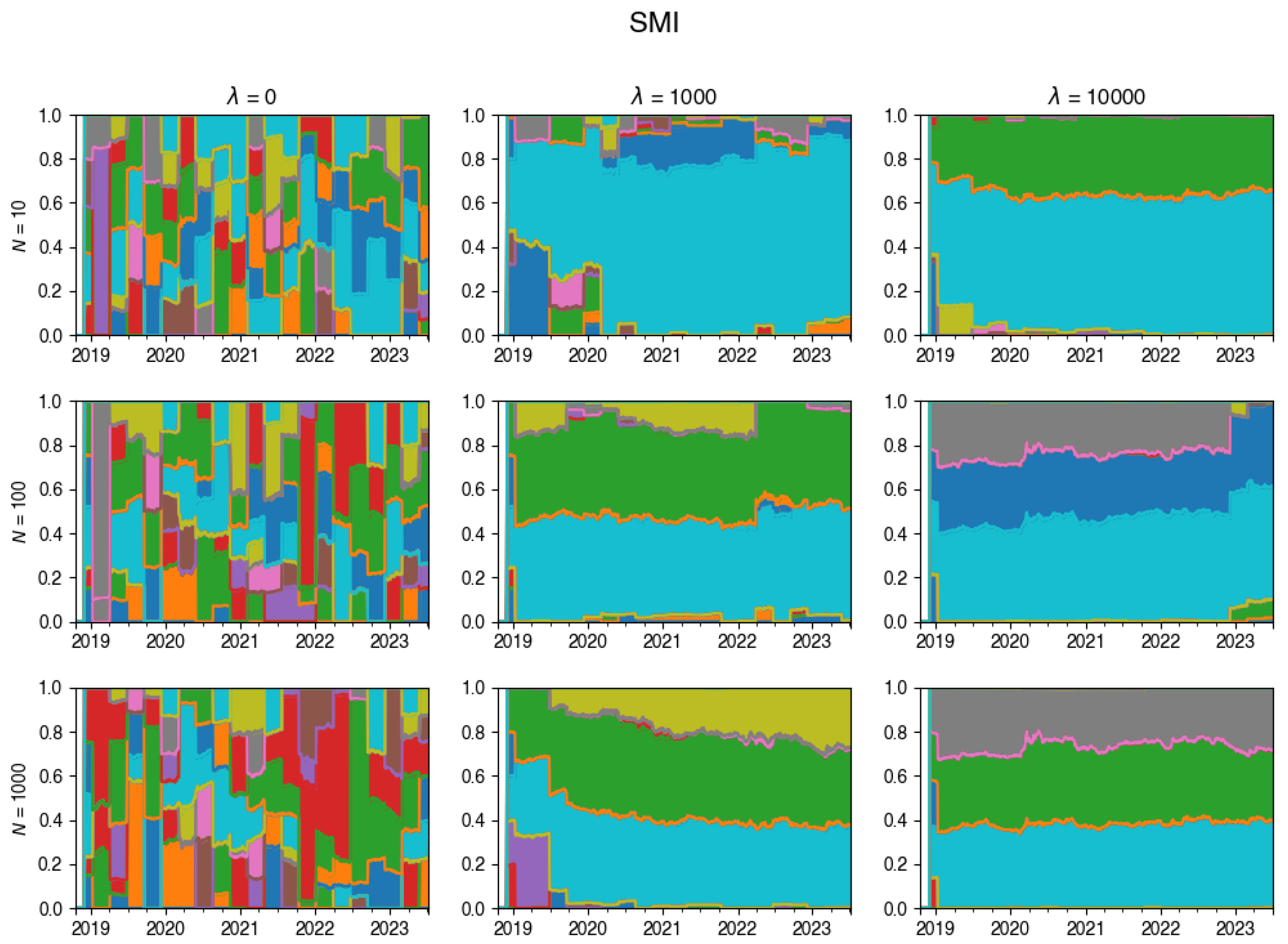
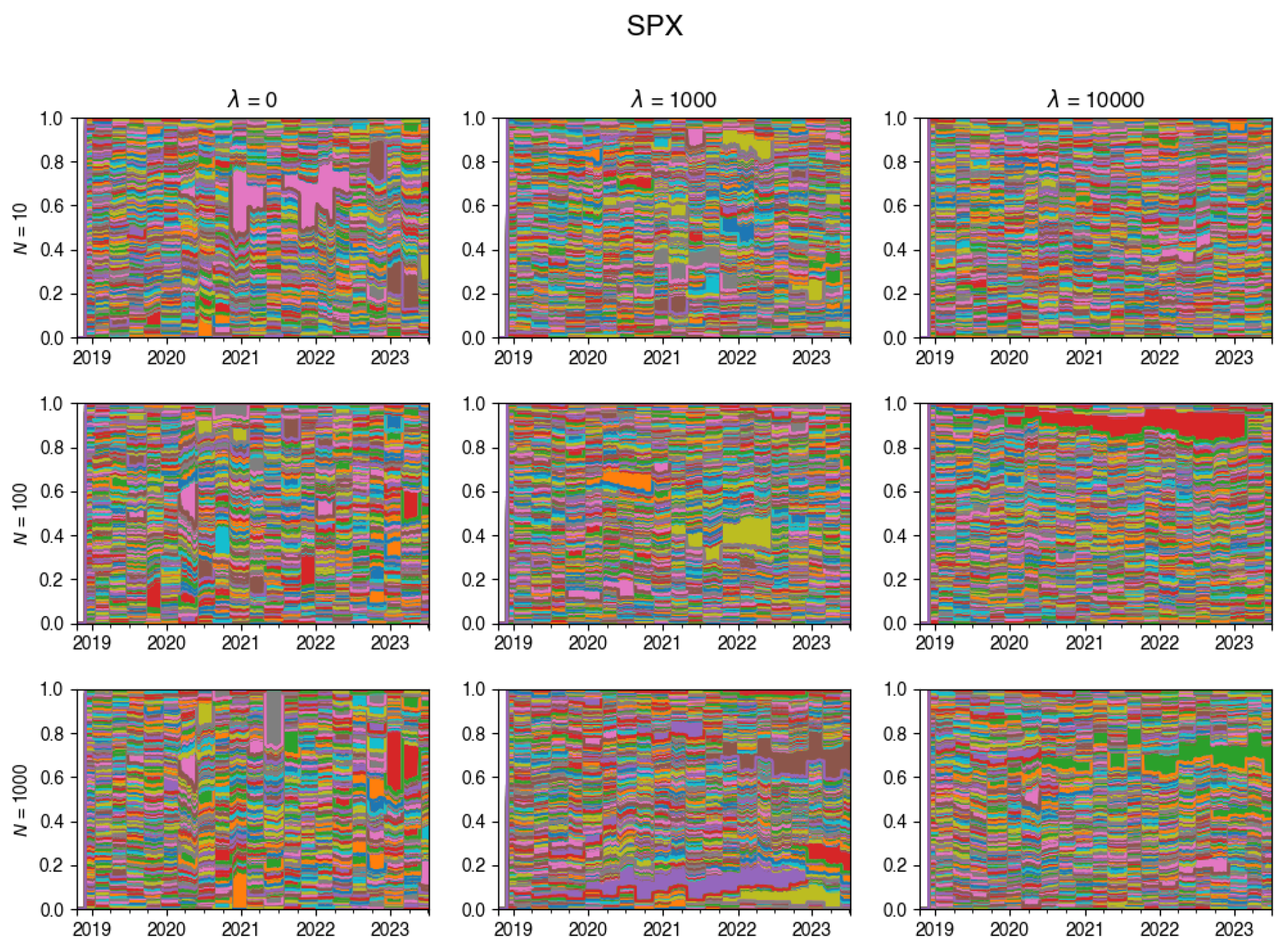
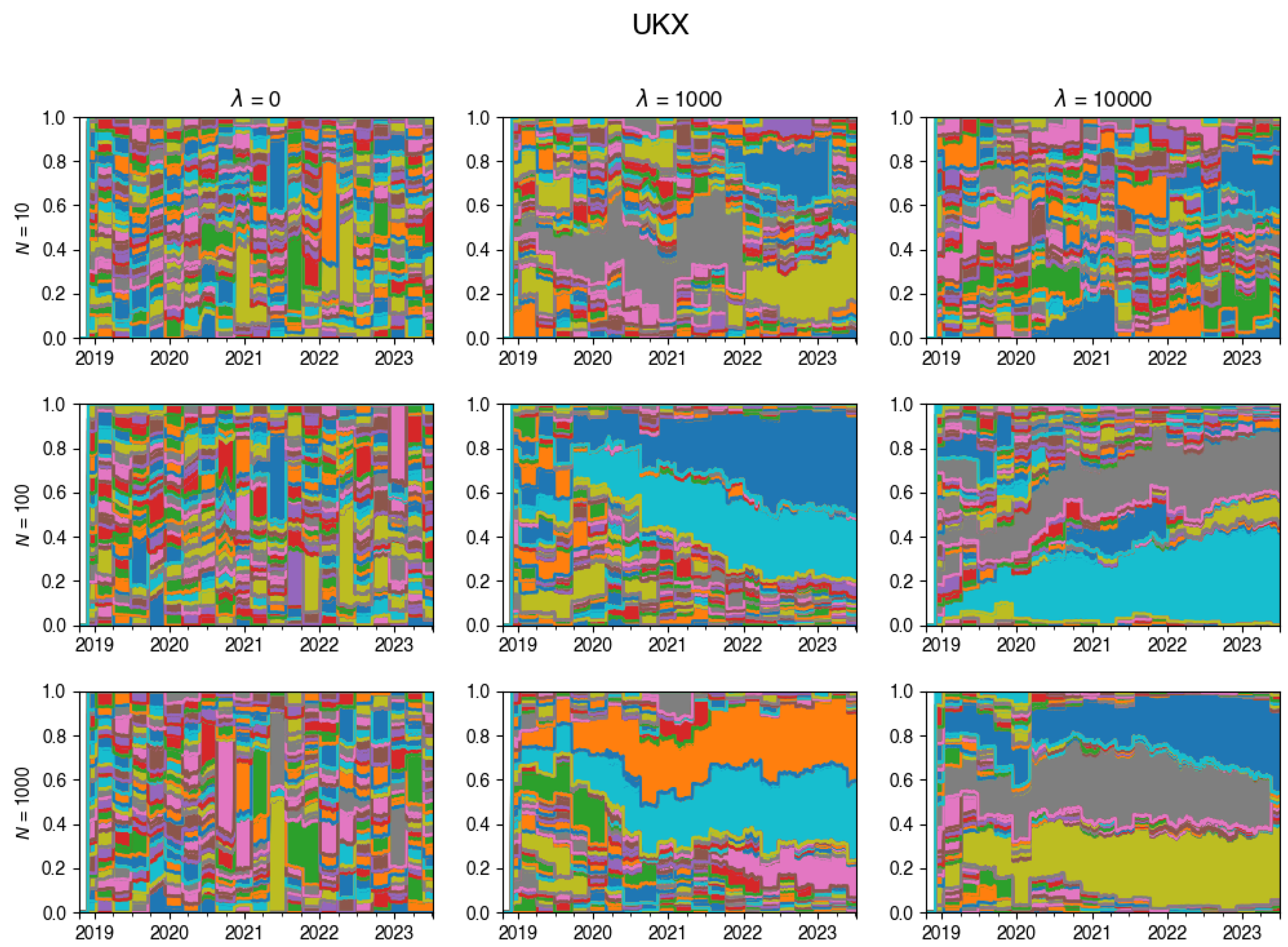
Appendix A.3. Composition Plots

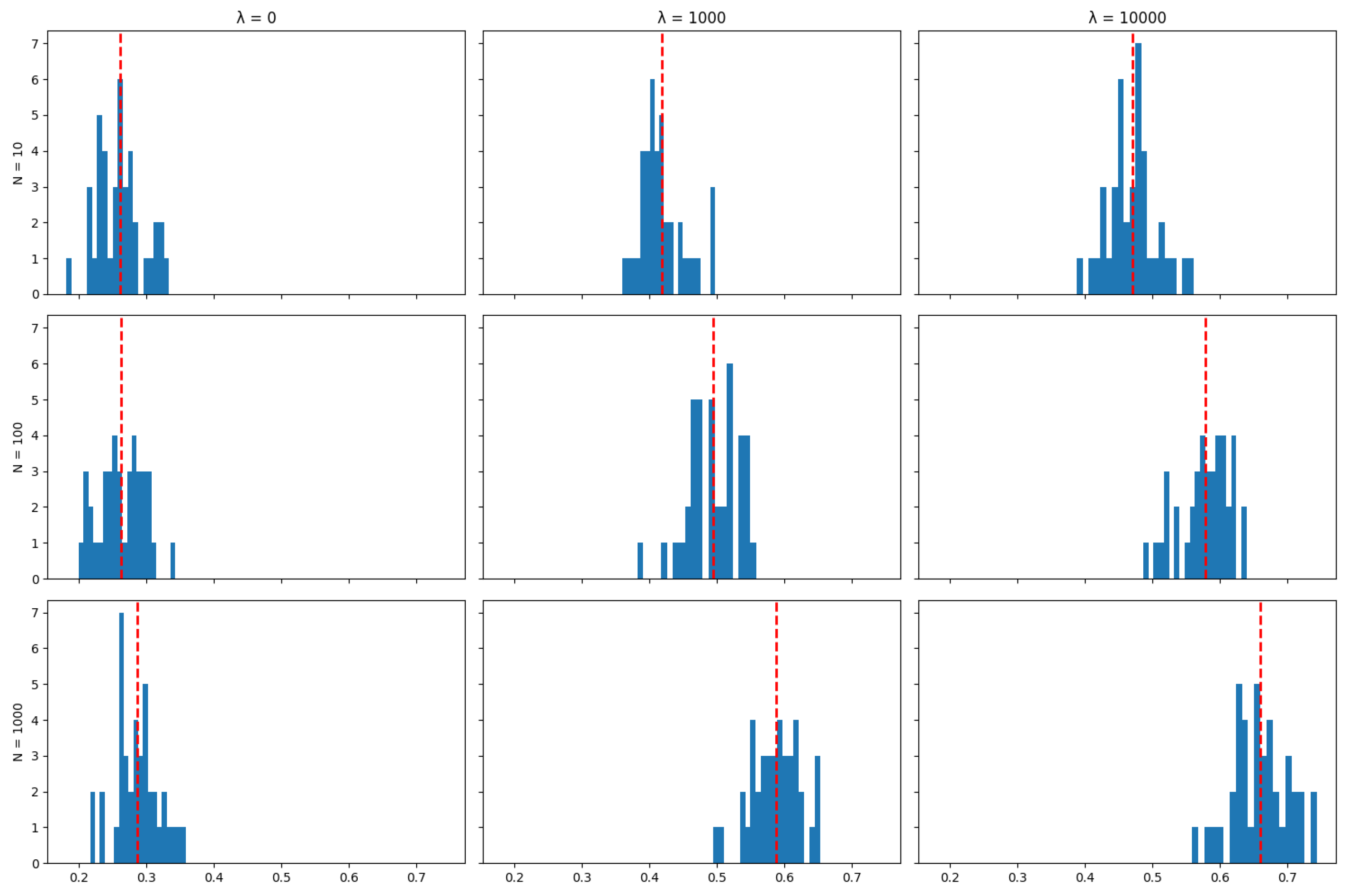
Appendix A.4. Mean Assets Retention





| 1 | In Satpathy and Shah (2022) the sparse index problem is solved without considering any constraints on the . In such a case the optimal solution admits an explicit form. |
| 2 | Going forward particles, samples and permutations will be used interchangeably, i.e., each particle represents a particular subset of p of the n stocks comprising the index. |
| 3 | Results in the literature suggest that multinomial resampling is not a good choice in this context. For example, Hol et al. (2006) note that “theoretical analysis shows that the resampling quality can be improved by using a different algorithm than multinomial resampling.” In particular, residual and stratified resampling have lower variances, and Hol et al. (2006) advocate systematic resampling over stratified resampling as it has the lowest discrepancy. |
| 4 | The proposal in MH algorithm has no relation to the proposal in the Importance Sampling step. |
References
- Barber, Brad, and Terrance Odean. 2000. Trading is hazardous to your wealth: The common stock investment performance of individual investors. Journal of Finance 55: 773–806. [Google Scholar] [CrossRef]
- Benidis, Konstantinos, Yiyong Feng, and Daniel P. Palomar. 2018. Optimization methods for financial index tracking: From theory to practice. Foundations and Trends® in Optimization 3: 171–279. [Google Scholar] [CrossRef]
- Chen, Zhe. 2003. Bayesian filtering: From Kalman filters to particle filters, and beyond. Statistics 182: 1–69. [Google Scholar] [CrossRef]
- Del Moral, Pierre, Arnaud Doucet, and Ajay Jasra. 2006. Sequential Monte Carlo Samplers. Journal of the Royal Statistical Society Series B: Statistical Methodology 68: 411–36. [Google Scholar] [CrossRef]
- Duan, Jin-Chuan. 2019. Variable selection with big data based on zero norm and via sequential Monte Carlo. SSRN. [Google Scholar] [CrossRef]
- Gellert, Karol, and Erik Schlögl. 2021. Parameter Learning and Change Detection Using a Particle Filter with Accelerated Adaptation. Risks 9: 228. [Google Scholar] [CrossRef]
- Hol, Jeroen D., Thomas B. Schon, and Fredrik Gustafsson. 2006. On resampling algorithms for particle filters. Paper presented at the 2006 IEEE Nonlinear Statistical Signal Processing Workshop, Cambridge, UK, September 13–15; pp. 79–82. [Google Scholar]
- Rompotis, Gerasimos G. 2013. Actively vs. passively managed exchange traded funds. Aestimatio 6: 116–35. [Google Scholar]
- Ruf, Johannes, and Kangjianan Xie. 2019. The impact of proportional transaction costs on systematically generated portfolios. SIAM Journal on Financial Mathematics 11: 881–96. [Google Scholar] [CrossRef]
- Satpathy, Tanmay, and Rushabh Shah. 2022. Sparse index tracking using sequential Monte Carlo. Quantitative Finance 22: 1579–92. [Google Scholar] [CrossRef]
- Speekenbrink, Maarten. 2016. A tutorial on particle filters. Journal of Mathematical Psychology 73: 140–52. [Google Scholar] [CrossRef]
- Tibshirani, Robert. 1996. Regression shrinkage and selection via the lasso. Journal of the Royal Statistical Society Series B: Statistical Methodology 58: 267–88. [Google Scholar] [CrossRef]
- Xu, Kelvin, Jimmy Ba, Ryan Kiros, Kyunghyun Cho, Aaron Courville, Ruslan Salakhudinov, Rich Zemel, and Yoshua Bengio. 2015. Show, attend and tell: Neural image caption generation with visual attention. In International Conference on Machine Learning. Birmingham: PMLR, pp. 2048–57. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyper-Parameters | Values |
|---|---|
| Step Size () | 0.2 |
| Lookback Window Size (T) | 30 |
| ESS Threshold | |
| Number of Particles (n) | |
| Variance Explained | 95% |
| Rebalance Frequency (Observations) | 60 |
| Transaction Cost per Unit Nominal () | 0.001 |
| Transaction Cost Penalty () | 10,000 } |
| Index | Location | Number of Stocks | Sectors |
|---|---|---|---|
| SMI | Switzerland | 20 | Financials, industrials, pharmaceuticals, and technology |
| Merval | Argentina | 20 | Financials, energy, consumer staples, and industrials. |
| IBEX | Spain | 35 | Financials, telecommunications, utilities, and energy. |
| CAC | France | 40 | Financials, industrials, consumer goods, and healthcare. |
| HSI | Hong Kong | 50 | Financials, real estate, technology, and consumer goods. |
| DAX | Germany | 30 | Automotive, financial services, industrials, and technology. |
| IPSA | Chile | 30 | Utilities, financials, industrials, and consumer goods. |
| SENSEX | India | 30 | Information technology, financial services, energy, and consumer goods. |
| IBOV | Brazil | 73 | Financials, energy, consumer discretionary, and materials. |
| UKX | United Kingdom | 100 | Financials, energy, consumer goods, and pharmaceuticals. |
| NKY | Japan | 225 | Industrials, technology, consumer goods, and financials. |
| JALSH | South Africa | 164 | Financials, mining, consumer goods, and telecommunications. |
| SHSZ300 | China | 300 | Financials, industrials, technology, and healthcare. |
| SPTSX | Canada | 230 | Financials, energy, materials, and industrials. |
| SPX | United States | 500 | Financials, technology, healthcare, and consumer discretionary. |
| TWSE | Taiwan | 900+ | Technology, manufacturing, financials, and telecommunications. |
| Mean Abs Wealth Error | Total Cost | Tracking Error | |||||||
|---|---|---|---|---|---|---|---|---|---|
| N = 10 | = 0 | = 1000 | = 10,000 | = 0 | = 1000 | = 10,000 | = 0 | = 1000 | = 10,000 |
| CAC | 0.111 ± 0.018 | 0.128 ± 0.025 | 0.145 ± 0.024 | 37,461.2 ± 1300.0 | 21,823.1 ± 1300.0 | 14,280.5 ± 1600.0 | 3.52 ± 2.2 | 4.93 ± 4.6 | 6.78 ± 8.3 |
| DAX | 0.15 ± 0.02 | 0.149 ± 0.029 | 0.144 ± 0.022 | 37,367.5 ± 1200.0 | 23,546.9 ± 1200.0 | 19,775.7 ± 1600.0 | 3.89 ± 1.6 | 4.31 ± 3.1 | 5.33 ± 5.1 |
| HSI | 0.162 ± 0.025 | 0.123 ± 0.031 | 0.113 ± 0.022 | 37,738.1 ± 1100.0 | 26,915.6 ± 1100.0 | 22,143.1 ± 1200.0 | 8.11 ± 5.4 | 4.51 ± 2.5 | 4.98 ± 4.5 |
| IBEX | 0.087 ± 0.017 | 0.128 ± 0.029 | 0.15 ± 0.044 | 32,016.2 ± 1100.0 | 15,890.0 ± 1100.0 | 10,220.6 ± 1100.0 | 5.74 ± 3.6 | 7.19 ± 6.8 | 8.30 ± 1.1 |
| IBOV | 0.172 ± 0.033 | 0.183 ± 0.031 | 0.186 ± 0.035 | 43,602.5 ± 1900.0 | 33,271.0 ± 1400.0 | 29,226.9 ± 1700.0 | 5.53 ± 4.1 | 4.60 ± 4.5 | 5.34 ± 5.9 |
| IPSA | 0.174 ± 0.019 | 0.137 ± 0.018 | 0.183 ± 0.047 | 25,533.6 ± 750.0 | 17,580.6 ± 1300.0 | 15,129.8 ± 1400.0 | 9.84 ± 4.7 | 8.05 ± 5.3 | 1.26 ± 3.1 |
| JALSH | 0.221 ± 0.028 | 0.179 ± 0.025 | 0.175 ± 0.027 | 34,301.3 ± 1000.0 | 26,258.0 ± 960.0 | 25,863.5 ± 1200.0 | 4.82 ± 1.8 | 4.56 ± 1.9 | 4.76 ± 2.7 |
| MERVAL | 0.77 ± 0.13 | 0.84 ± 0.19 | 0.84 ± 0.21 | 79,791.8 ± 8500.0 | 46,439.5 ± 6000.0 | 28,360.7 ± 4300.0 | 2.03 ± 1.4 | 1.66 ± 1.2 | 1.79 ± 1.6 |
| NKY | 0.125 ± 0.015 | 0.102 ± 0.013 | 0.085 ± 0.013 | 33,800.9 ± 520.0 | 28,365.3 ± 530.0 | 28,252.4 ± 530.0 | 1.8 ± 1 | 1.46 ± 6.5 | 1.42 ± 6.4 |
| SENSEX | 0.189 ± 0.053 | 0.187 ± 0.038 | 0.166 ± 0.036 | 48,238.7 ± 2300.0 | 20,878.6 ± 1800.0 | 13,487.9 ± 1700.0 | 4.31 ± 2.4 | 5.01 ± 2.9 | 5.83 ± 4.1 |
| SHSZ300 | 0.256 ± 0.045 | 0.3 ± 0.035 | 0.399 ± 0.044 | 57,871.9 ± 2200.0 | 49,309.1 ± 1200.0 | 52,331.2 ± 1300.0 | 8.15 ± 5.4 | 3.9 ± 2 | 3.13 ± 1.5 |
| SMI | 0.134 ± 0.024 | 0.08 ± 0.015 | 0.074 ± 0.013 | 37,641.7 ± 1200.0 | 8376.9 ± 990.0 | 4133.0 ± 740.0 | 2.41 ± 1.5 | 3.12 ± 2.5 | 3.23 ± 2.6 |
| SPTSX | 0.226 ± 0.039 | 0.17 ± 0.02 | 0.16 ± 0.023 | 48,127.1 ± 1600.0 | 39,464.1 ± 790.0 | 37,829.3 ± 820.0 | 3.52 ± 2.4 | 2.31 ± 1.3 | 1.92 ± 1.4 |
| SPX | 0.09 ± 0.014 | 0.075 ± 0.012 | 0.082 ± 0.012 | 45,785.0 ± 1000.0 | 40,077.8 ± 670.0 | 38,728.4 ± 810.0 | 2.82 ± 3.5 | 1.85 ± 9.6 | 1.42 ± 8.3 |
| TWSE | 0.18 ± 0.02 | 0.152 ± 0.022 | 0.135 ± 0.016 | 43,858.6 ± 900.0 | 40,046.5 ± 1300.0 | 38,459.0 ± 840.0 | 5.72 ± 1.8 | 5.88 ± 1.9 | 6.00 ± 1.4 |
| UKX | 0.159 ± 0.031 | 0.119 ± 0.023 | 0.11 ± 0.02 | 38,613.5 ± 1100.0 | 26,332.3 ± 1300.0 | 24,699.3 ± 1200.0 | 3.19 ± 1.9 | 2.75 ± 2.2 | 2.62 ± 2.1 |
| Mean Abs Wealth Error | Total Cost | Tracking Error | |||||||
|---|---|---|---|---|---|---|---|---|---|
| N = 100 | = 0 | = 1000 | = 10,000 | = 0 | = 1000 | = 10,000 | = 0 | = 1000 | = 10,000 |
| CAC | 0.119 ± 0.026 | 0.213 ± 0.034 | 0.166 ± 0.031 | 38,713.0 ± 1400.0 | 11,502.7 ± 1500.0 | 8424.6 ± 1300.0 | 4.08 ± 3.8 | 6.08 ± 5.8 | 5.82 ± 7.5 |
| DAX | 0.145 ± 0.024 | 0.143 ± 0.021 | 0.149 ± 0.023 | 38,583.7 ± 1500.0 | 11,689.6 ± 750.0 | 9031.4 ± 710.0 | 4.64 ± 1.8 | 6.90 ± 7.5 | 7.11 ± 6.5 |
| HSI | 0.178 ± 0.029 | 0.121 ± 0.024 | 0.151 ± 0.036 | 38,144.5 ± 1200.0 | 16,605.8 ± 1000.0 | 13,927.5 ± 1200.0 | 7.95 ± 3.2 | 7.10 ± 4.6 | 8.18 ± 1.1 |
| IBEX | 0.103 ± 0.019 | 0.187 ± 0.035 | 0.148 ± 0.032 | 33,051.8 ± 1200.0 | 9396.5 ± 910.0 | 5140.7 ± 530.0 | 6.51 ± 4.1 | 6.68 ± 6.8 | 5.98 ± 8.3 |
| IBOV | 0.158 ± 0.033 | 0.243 ± 0.054 | 0.256 ± 0.052 | 43,072.5 ± 1700.0 | 23,722.2 ± 1600.0 | 21,695.1 ± 1600.0 | 6.64 ± 5.8 | 6.04 ± 5.8 | 7.73 ± 8.8 |
| IPSA | 0.159 ± 0.021 | 0.155 ± 0.018 | 0.178 ± 0.024 | 26,124.1 ± 1000.0 | 8361.2 ± 780.0 | 5599.9 ± 600.0 | 9.38 ± 2.8 | 1.11 ± 1.4 | 1.20 ± 1.5 |
| JALSH | 0.198 ± 0.021 | 0.173 ± 0.029 | 0.205 ± 0.056 | 35,285.6 ± 730.0 | 23,295.5 ± 1400.0 | 21,555.3 ± 2000.0 | 4.95 ± 1.3 | 5.64 ± 4.7 | 6.47 ± 6.8 |
| MERVAL | 0.711 ± 0.079 | 1.04 ± 0.21 | 0.84 ± 0.15 | 78,626.3 ± 5700.0 | 33,692.0 ± 4700.0 | 17,779.8 ± 2500.0 | 3.007 ± 8.9 | 1.62 ± 1.1 | 1.61 ± 1.3 |
| NKY | 0.137 ± 0.013 | 0.095 ± 0.013 | 0.089 ± 0.013 | 33,699.9 ± 510.0 | 25,742.7 ± 570.0 | 24,273.2 ± 660.0 | 1.98 ± 7.8 | 1.651 ± 9 | 1.65 ± 1.5 |
| SENSEX | 0.145 ± 0.024 | 0.16 ± 0.029 | 0.154 ± 0.026 | 45,068.3 ± 1600.0 | 11,596.8 ± 1400.0 | 7147.5 ± 1000.0 | 4.58 ± 1.8 | 5.76 ± 4.3 | 6.20 ± 5.9 |
| SHSZ300 | 0.257 ± 0.055 | 0.32 ± 0.042 | 0.417 ± 0.056 | 58,082.6 ± 2700.0 | 44,531.1 ± 1200.0 | 45,820.7 ± 1700.0 | 7.43 ± 3.6 | 4.19 ± 3.8 | 3.76 ± 4.8 |
| SMI | 0.152 ± 0.026 | 0.076 ± 0.011 | 0.0712 ± 0.0084 | 38,880.2 ± 1200.0 | 3686.9 ± 370.0 | 1305.6 ± 190.0 | 2.8 ± 1 | 2.61 ± 1.7 | 2.25 ± 1.3 |
| SPTSX | 0.238 ± 0.039 | 0.199 ± 0.038 | 0.18 ± 0.04 | 48,773.5 ± 1600.0 | 34,953.4 ± 1200.0 | 32,363.8 ± 1300.0 | 4.32 ± 7.5 | 2.58 ± 3.1 | 2.76 ± 3.6 |
| SPX | 0.094 ± 0.014 | 0.088 ± 0.017 | 0.092 ± 0.018 | 45,003.7 ± 1000.0 | 35,540.5 ± 800.0 | 33,498.3 ± 730.0 | 3.12 ± 4.1 | 2.05 ± 2.1 | 1.80 ± 2.4 |
| TWSE | 0.154 ± 0.021 | 0.151 ± 0.021 | 0.157 ± 0.018 | 45,331.9 ± 970.0 | 36,982.7 ± 1200.0 | 35,035.3 ± 1200.0 | 5.76 ± 8.8 | 6.11 ± 2.7 | 6.32 ± 2.3 |
| UKX | 0.153 ± 0.029 | 0.134 ± 0.026 | 0.107 ± 0.018 | 38,755.3 ± 1200.0 | 19,185.3 ± 1000.0 | 16,099.2 ± 710.0 | 3.29 ± 1.9 | 3.20 ± 3.1 | 3.34 ± 2.9 |
| Mean Abs Wealth Error | Total Cost | Tracking Error | |||||||
|---|---|---|---|---|---|---|---|---|---|
| N = 1000 | = 0 | = 1000 | = 10,000 | = 0 | = 1000 | = 10,000 | = 0 | = 1000 | = 10,000 |
| CAC | 0.154 ± 0.021 | 0.175 ± 0.024 | 0.17 ± 0.02 | 36,766.1 ± 1300.0 | 6915.6 ± 910.0 | 5066.1 ± 760.0 | 6.06 ± 5.8 | 5.48 ± 7.2 | 4.78 ± 5.6 |
| DAX | 0.123 ± 0.014 | 0.149 ± 0.022 | 0.16 ± 0.024 | 38,991.0 ± 1100.0 | 7031.1 ± 560.0 | 5010.0 ± 360.0 | 5.43 ± 2.1 | 5.95 ± 5.7 | 6.74 ± 5.1 |
| HSI | 0.194 ± 0.026 | 0.158 ± 0.034 | 0.154 ± 0.038 | 38,762.8 ± 1100.0 | 12,179.1 ± 860.0 | 9883.1 ± 830.0 | 7.83 ± 2.2 | 9.19 ± 7.7 | 1.04 ± 1.1 |
| IBEX | 0.098 ± 0.019 | 0.175 ± 0.034 | 0.152 ± 0.027 | 33,193.2 ± 1100.0 | 5741.9 ± 530.0 | 3089.9 ± 320.0 | 6.99 ± 3.9 | 5.66 ± 4.8 | 4.90 ± 7.2 |
| IBOV | 0.165 ± 0.037 | 0.235 ± 0.051 | 0.29 ± 0.06 | 43,649.0 ± 2000.0 | 17,291.7 ± 1100.0 | 15,714.1 ± 1500.0 | 7.46 ± 6.2 | 7.21 ± 7.4 | 7.99 ± 6.8 |
| IPSA | 0.16 ± 0.02 | 0.167 ± 0.015 | 0.173 ± 0.019 | 25,937.2 ± 880.0 | 4367.5 ± 310.0 | 3349.6 ± 330.0 | 9.43 ± 2.3 | 1.02 ± 1.8 | 1.08 ± 1.4 |
| JALSH | 0.202 ± 0.029 | 0.207 ± 0.031 | 0.3 ± 0.07 | 35,465.8 ± 990.0 | 22,845.9 ± 1800.0 | 22,747.9 ± 2200.0 | 5.32 ± 1.5 | 7.66 ± 9.3 | 9.19 ± 7.6 |
| MERVAL | 0.62 ± 0.094 | 1.04 ± 0.23 | 1.06 ± 0.23 | 78,527.7 ± 4800.0 | 23,606.4 ± 3500.0 | 17,217.0 ± 2400.0 | 3.024 ± 3.7 | 1.39 ± 7.9 | 1.46 ± 1.3 |
| NKY | 0.147 ± 0.013 | 0.088 ± 0.013 | 0.083 ± 0.013 | 33,843.6 ± 490.0 | 24,069.7 ± 680.0 | 22,391.7 ± 580.0 | 2.03 ± 6.4 | 1.98 ± 1.3 | 1.85 ± 1.3 |
| SENSEX | 0.135 ± 0.026 | 0.167 ± 0.027 | 0.158 ± 0.032 | 44,861.1 ± 1500.0 | 6759.4 ± 670.0 | 4589.2 ± 580.0 | 5.03 ± 1.6 | 6.12 ± 5.7 | 6.37 ± 6.1 |
| SHSZ300 | 0.365 ± 0.064 | 0.37 ± 0.06 | 0.407 ± 0.064 | 62,652.2 ± 2700.0 | 41,541.1 ± 1600.0 | 40,719.1 ± 1900.0 | 7.82 ± 4.4 | 4.59 ± 5.2 | 4.08 ± 6.3 |
| SMI | 0.18 ± 0.03 | 0.065 ± 0.011 | 0.058 ± 0.006 | 38,389.3 ± 1200.0 | 2128.6 ± 340.0 | 968.2 ± 190.0 | 2.97 ± 8.7 | 2.16 ± 2.2 | 2.17 ± 2.7 |
| SPTSX | 0.249 ± 0.041 | 0.245 ± 0.055 | 0.18 ± 0.04 | 49,544.5 ± 1600.0 | 32,659.8 ± 1500.0 | 28,436.5 ± 1200.0 | 3.9 ± 3 | 3.94 ± 7.6 | 2.85 ± 4.3 |
| SPX | 0.08 ± 0.012 | 0.1 ± 0.02 | 0.1 ± 0.02 | 46,020.7 ± 900.0 | 33,298.2 ± 780.0 | 31,047.2 ± 750.0 | 3.45 ± 4.5 | 2.27 ± 1.7 | 1.97 ± 2 |
| TWSE | 0.144 ± 0.017 | 0.198 ± 0.035 | 0.17 ± 0.04 | 45,756.3 ± 810.0 | 33,299.1 ± 1800.0 | 31,386.4 ± 1700.0 | 5.84 ± 1.6 | 6.3 ± 4 | 6.60 ± 3.6 |
| UKX | 0.177 ± 0.026 | 0.113 ± 0.027 | 0.105 ± 0.026 | 39,896.9 ± 950.0 | 14,552.5 ± 930.0 | 11,522.6 ± 800.0 | 3.56 ± 2.2 | 3.11 ± 2.9 | 3.41 ± 2.9 |
| Min Retention | Max Retention | |||||
|---|---|---|---|---|---|---|
| N = 10 | = 0 | = 1000 | = 10,000 | = 0 | = 1000 | = 10,000 |
| CAC | 0.019 ± 0.014 | 0.142 ± 0.012 | 0.188 ± 0.021 | 0.501 ± 0.026 | 0.576 ± 0.019 | 0.635 ± 0.022 |
| DAX | 0.0031 ± 0.0061 | 0.136 ± 0.011 | 0.16 ± 0.015 | 0.465 ± 0.023 | 0.576 ± 0.027 | 0.571 ± 0.022 |
| HSI | 0.049 ± 0.012 | 0.102 ± 0.012 | 0.138 ± 0.013 | 0.388 ± 0.016 | 0.455 ± 0.015 | 0.459 ± 0.019 |
| IBEX | 0.013 ± 0.012 | 0.149 ± 0.017 | 0.2 ± 0.02 | 0.546 ± 0.028 | 0.649 ± 0.025 | 0.684 ± 0.021 |
| IBOV | 0.05 ± 0.01 | 0.109 ± 0.013 | 0.131 ± 0.014 | 0.389 ± 0.016 | 0.445 ± 0.017 | 0.463 ± 0.012 |
| IPSA | 0 ± 0 | 0.136 ± 0.022 | 0.1661 ± 0.0092 | 0.548 ± 0.031 | 0.611 ± 0.025 | 0.654 ± 0.015 |
| JALSH | 0.102 ± 0.011 | 0.14 ± 0.01 | 0.151 ± 0.011 | 0.372 ± 0.013 | 0.402 ± 0.012 | 0.398 ± 0.011 |
| MERVAL | 0 ± 0 | 0.152 ± 0.028 | 0.24 ± 0.02 | 0.671 ± 0.044 | 0.749 ± 0.031 | 0.796 ± 0.025 |
| NKY | 0.1329 ± 0.0068 | 0.1611 ± 0.0084 | 0.1667 ± 0.0096 | 0.3314 ± 0.0081 | 0.354 ± 0.009 | 0.355 ± 0.0072 |
| SENSEX | 0.011 ± 0.012 | 0.18 ± 0.02 | 0.247 ± 0.021 | 0.56 ± 0.026 | 0.702 ± 0.026 | 0.706 ± 0.022 |
| SHSZ300 | 0.1115 ± 0.0085 | 0.1299 ± 0.0074 | 0.141 ± 0.007 | 0.302 ± 0.0092 | 0.3266 ± 0.0077 | 0.3362 ± 0.0088 |
| SMI | 0.042 ± 0.023 | 0.255 ± 0.026 | 0.339 ± 0.022 | 0.721 ± 0.036 | 0.866 ± 0.035 | 0.912 ± 0.031 |
| SPTSX | 0.1154 ± 0.0076 | 0.1429 ± 0.0086 | 0.1551 ± 0.0074 | 0.324 ± 0.011 | 0.343 ± 0.0074 | 0.351 ± 0.008 |
| SPX | 0.1271 ± 0.0077 | 0.143 ± 0.007 | 0.1492 ± 0.0068 | 0.3066 ± 0.0085 | 0.3226 ± 0.0078 | 0.3361 ± 0.0072 |
| TWSE | 0.1214 ± 0.0071 | 0.1511 ± 0.0084 | 0.155 ± 0.0084 | 0.3138 ± 0.0093 | 0.328 ± 0.0075 | 0.3354 ± 0.0087 |
| UKX | 0.07 ± 0.012 | 0.131 ± 0.012 | 0.152 ± 0.011 | 0.392 ± 0.014 | 0.419 ± 0.014 | 0.426 ± 0.016 |
| Min Retention | Max Retention | |||||
| N = 100 | = 0 | = 1000 | = 10,000 | = 0 | = 1000 | = 10000 |
| CAC | 0.013 ± 0.012 | 0.231 ± 0.016 | 0.3 ± 0.02 | 0.501 ± 0.026 | 0.658 ± 0.023 | 0.727 ± 0.026 |
| DAX | 0.0071 ± 0.0098 | 0.211 ± 0.021 | 0.264 ± 0.017 | 0.479 ± 0.022 | 0.635 ± 0.024 | 0.682 ± 0.021 |
| HSI | 0.051 ± 0.011 | 0.156 ± 0.013 | 0.186 ± 0.011 | 0.398 ± 0.019 | 0.511 ± 0.021 | 0.508 ± 0.013 |
| IBEX | 0.01 ± 0.01 | 0.25 ± 0.02 | 0.332 ± 0.022 | 0.543 ± 0.031 | 0.717 ± 0.027 | 0.795 ± 0.028 |
| IBOV | 0.0538 ± 0.0097 | 0.169 ± 0.013 | 0.18 ± 0.01 | 0.372 ± 0.014 | 0.494 ± 0.017 | 0.503 ± 0.018 |
| IPSA | 0 ± 0 | 0.212 ± 0.021 | 0.29 ± 0.02 | 0.545 ± 0.031 | 0.726 ± 0.025 | 0.773 ± 0.026 |
| JALSH | 0.09 ± 0.01 | 0.1754 ± 0.0096 | 0.181 ± 0.011 | 0.355 ± 0.013 | 0.427 ± 0.014 | 0.435 ± 0.012 |
| MERVAL | 0 ± 0 | 0.247 ± 0.027 | 0.399 ± 0.038 | 0.603 ± 0.038 | 0.863 ± 0.036 | 0.964 ± 0.025 |
| NKY | 0.1184 ± 0.0086 | 0.1767 ± 0.0071 | 0.1744 ± 0.0089 | 0.3191 ± 0.0093 | 0.357 ± 0.011 | 0.3661 ± 0.0084 |
| SENSEX | 0.011 ± 0.012 | 0.285 ± 0.019 | 0.359 ± 0.024 | 0.55 ± 0.029 | 0.74 ± 0.03 | 0.8 ± 0.02 |
| SHSZ300 | 0.115 ± 0.007 | 0.1508 ± 0.0069 | 0.1586 ± 0.0077 | 0.308 ± 0.009 | 0.3414 ± 0.0096 | 0.3442 ± 0.0087 |
| SMI | 0.008 ± 0.011 | 0.403 ± 0.019 | 0.491 ± 0.013 | 0.74 ± 0.04 | 0.933 ± 0.031 | 0.981 ± 0.018 |
| SPTSX | 0.109 ± 0.008 | 0.1505 ± 0.0095 | 0.1699 ± 0.0067 | 0.317 ± 0.0074 | 0.363 ± 0.011 | 0.3599 ± 0.0091 |
| SPX | 0.1136 ± 0.0098 | 0.161 ± 0.0084 | 0.1704 ± 0.0068 | 0.2989 ± 0.0081 | 0.3304 ± 0.0066 | 0.3442 ± 0.0087 |
| TWSE | 0.1086 ± 0.0078 | 0.1651 ± 0.0075 | 0.1657 ± 0.0094 | 0.3066 ± 0.0082 | 0.3462 ± 0.0095 | 0.35 ± 0.01 |
| UKX | 0.084 ± 0.011 | 0.171 ± 0.013 | 0.183 ± 0.011 | 0.383 ± 0.019 | 0.46 ± 0.012 | 0.474 ± 0.015 |
| Min Retention | Max Retention | |||||
| N = 1000 | = 0 | = 1000 | = 10,000 | = 0 | = 1000 | = 10,000 |
| CAC | 0.013 ± 0.012 | 0.329 ± 0.018 | 0.38 ± 0.02 | 0.457 ± 0.023 | 0.693 ± 0.019 | 0.789 ± 0.025 |
| DAX | 0.0031 ± 0.0061 | 0.294 ± 0.015 | 0.361 ± 0.022 | 0.514 ± 0.028 | 0.7 ± 0.028 | 0.747 ± 0.019 |
| HSI | 0.049 ± 0.012 | 0.208 ± 0.012 | 0.233 ± 0.014 | 0.405 ± 0.016 | 0.519 ± 0.014 | 0.535 ± 0.016 |
| IBEX | 0.01 ± 0.011 | 0.371 ± 0.022 | 0.442 ± 0.026 | 0.539 ± 0.023 | 0.787 ± 0.028 | 0.86 ± 0.018 |
| IBOV | 0.05 ± 0.012 | 0.199 ± 0.012 | 0.231 ± 0.013 | 0.394 ± 0.018 | 0.513 ± 0.013 | 0.517 ± 0.013 |
| IPSA | 0 ± 0 | 0.334 ± 0.018 | 0.402 ± 0.022 | 0.626 ± 0.046 | 0.802 ± 0.018 | 0.827 ± 0.025 |
| JALSH | 0.09 ± 0.01 | 0.182 ± 0.011 | 0.2 ± 0.01 | 0.346 ± 0.013 | 0.429 ± 0.012 | 0.459 ± 0.012 |
| MERVAL | 0 ± 0 | 0.434 ± 0.028 | 0.508 ± 0.027 | 0.599 ± 0.036 | 0.989 ± 0.015 | 0.989 ± 0.015 |
| NKY | 0.1185 ± 0.0086 | 0.1861 ± 0.0086 | 0.1822 ± 0.0072 | 0.32 ± 0.01 | 0.3678 ± 0.0078 | 0.3778 ± 0.0095 |
| SENSEX | 0.033 ± 0.019 | 0.364 ± 0.028 | 0.451 ± 0.026 | 0.583 ± 0.032 | 0.8 ± 0.026 | 0.864 ± 0.023 |
| SHSZ300 | 0.1135 ± 0.0079 | 0.1629 ± 0.0069 | 0.171 ± 0.008 | 0.2982 ± 0.0076 | 0.3465 ± 0.0072 | 0.36 ± 0.01 |
| SMI | 0.033 ± 0.021 | 0.495 ± 0.0068 | 0.51 ± 0.0094 | 0.785 ± 0.031 | 0.9958 ± 0.0082 | 0 ± 0 |
| SPTSX | 0.1114 ± 0.0092 | 0.1578 ± 0.0085 | 0.1744 ± 0.0087 | 0.31 ± 0.01 | 0.3615 ± 0.0081 | 0.378 ± 0.011 |
| SPX | 0.1213 ± 0.0079 | 0.1699 ± 0.0081 | 0.1733 ± 0.0079 | 0.3 ± 0.0088 | 0.3506 ± 0.0077 | 0.3536 ± 0.0081 |
| TWSE | 0.1174 ± 0.0069 | 0.169 ± 0.008 | 0.1798 ± 0.0065 | 0.31 ± 0.01 | 0.3515 ± 0.0073 | 0.3586 ± 0.0089 |
| UKX | 0.078 ± 0.013 | 0.1968 ± 0.0091 | 0.2294 ± 0.0097 | 0.372 ± 0.013 | 0.488 ± 0.018 | 0.497 ± 0.014 |
| Max Weight | Mean Retention | |||||
|---|---|---|---|---|---|---|
| N = 10 | = 0 | = 1000 | = 10,000 | = 0 | = 1000 | = 10,000 |
| CAC | 0.567 ± 0.027 | 0.622 ± 0.023 | 0.708 ± 0.027 | 0.229 ± 0.011 | 0.3462 ± 0.0077 | 0.4 ± 0.011 |
| DAX | 0.709 ± 0.052 | 0.613 ± 0.035 | 0.699 ± 0.032 | 0.197 ± 0.011 | 0.33 ± 0.01 | 0.3547 ± 0.0094 |
| HSI | 0.767 ± 0.038 | 0.36 ± 0.021 | 0.475 ± 0.043 | 0.2038 ± 0.0072 | 0.2687 ± 0.0066 | 0.2887 ± 0.0063 |
| IBEX | 0.704 ± 0.039 | 0.706 ± 0.034 | 0.778 ± 0.029 | 0.25 ± 0.01 | 0.39 ± 0.01 | 0.4419 ± 0.0091 |
| IBOV | 0.48 ± 0.033 | 0.399 ± 0.028 | 0.465 ± 0.041 | 0.2072 ± 0.0065 | 0.271 ± 0.0063 | 0.2931 ± 0.0054 |
| IPSA | 0.968 ± 0.024 | 0.64 ± 0.031 | 0.71 ± 0.03 | 0.225 ± 0.012 | 0.358 ± 0.011 | 0.4048 ± 0.0082 |
| JALSH | 0.288 ± 0.041 | 0.335 ± 0.023 | 0.362 ± 0.027 | 0.2249 ± 0.0061 | 0.2671 ± 0.0056 | 0.2765 ± 0.0051 |
| MERVAL | 0.971 ± 0.013 | 0.809 ± 0.027 | 0.82 ± 0.02 | 0.267 ± 0.015 | 0.433 ± 0.011 | 0.512 ± 0.014 |
| NKY | 0.275 ± 0.034 | 0.179 ± 0.015 | 0.206 ± 0.014 | 0.2273 ± 0.0039 | 0.255 ± 0.004 | 0.2646 ± 0.0045 |
| SENSEX | 0.604 ± 0.031 | 0.666 ± 0.033 | 0.73 ± 0.03 | 0.26 ± 0.01 | 0.42 ± 0.01 | 0.47 ± 0.011 |
| SHSZ300 | 0.813 ± 0.014 | 0.1371 ± 0.0066 | 0.139 ± 0.012 | 0.2056 ± 0.0041 | 0.2313 ± 0.0033 | 0.235 ± 0.0033 |
| SMI | 0.763 ± 0.038 | 0.804 ± 0.018 | 0.726 ± 0.036 | 0.361 ± 0.012 | 0.537 ± 0.013 | 0.6113 ± 0.0096 |
| SPTSX | 0.31 ± 0.023 | 0.15 ± 0.01 | 0.176 ± 0.018 | 0.2124 ± 0.0041 | 0.2414 ± 0.0034 | 0.2493 ± 0.0034 |
| SPX | 0.322 ± 0.027 | 0.138 ± 0.008 | 0.149 ± 0.012 | 0.2116 ± 0.0033 | 0.231 ± 0.0032 | 0.2412 ± 0.0031 |
| TWSE | 0.276 ± 0.025 | 0.1287 ± 0.0075 | 0.1336 ± 0.0085 | 0.2163 ± 0.0035 | 0.2372 ± 0.0032 | 0.243 ± 0.004 |
| UKX | 0.438 ± 0.021 | 0.391 ± 0.037 | 0.41 ± 0.04 | 0.222 ± 0.005 | 0.274 ± 0.005 | 0.286 ± 0.006 |
| Max Weight | Mean Retention | |||||
| N = 100 | = 0 | = 1000 | = 10,000 | = 0 | = 1000 | = 10,000 |
| CAC | 0.586 ± 0.036 | 0.634 ± 0.022 | 0.61 ± 0.027 | 0.2273 ± 0.0097 | 0.4294 ± 0.0087 | 0.5 ± 0.01 |
| DAX | 0.847 ± 0.053 | 0.717 ± 0.023 | 0.735 ± 0.026 | 0.214 ± 0.012 | 0.41 ± 0.01 | 0.47 ± 0.01 |
| HSI | 0.809 ± 0.031 | 0.49 ± 0.02 | 0.55 ± 0.02 | 0.208 ± 0.0062 | 0.3172 ± 0.0067 | 0.3433 ± 0.0066 |
| IBEX | 0.785 ± 0.035 | 0.659 ± 0.031 | 0.624 ± 0.021 | 0.231 ± 0.012 | 0.4794 ± 0.0099 | 0.557 ± 0.009 |
| IBOV | 0.497 ± 0.036 | 0.477 ± 0.023 | 0.49 ± 0.022 | 0.2106 ± 0.0063 | 0.3213 ± 0.0059 | 0.3365 ± 0.0057 |
| IPSA | 0.9991 ± 0.0016 | 0.748 ± 0.029 | 0.747 ± 0.028 | 0.234 ± 0.013 | 0.453 ± 0.011 | 0.5179 ± 0.0092 |
| JALSH | 0.293 ± 0.035 | 0.345 ± 0.017 | 0.396 ± 0.019 | 0.218 ± 0.005 | 0.297 ± 0.0056 | 0.3074 ± 0.0045 |
| MERVAL | 0.96 ± 0.008 | 0.694 ± 0.027 | 0.685 ± 0.026 | 0.243 ± 0.014 | 0.582 ± 0.014 | 0.677 ± 0.015 |
| NKY | 0.34 ± 0.035 | 0.218 ± 0.015 | 0.256 ± 0.013 | 0.219 ± 0.004 | 0.2649 ± 0.0033 | 0.2747 ± 0.0041 |
| SENSEX | 0.622 ± 0.025 | 0.618 ± 0.025 | 0.58 ± 0.02 | 0.26 ± 0.01 | 0.494 ± 0.012 | 0.578 ± 0.012 |
| SHSZ300 | 0.819 ± 0.017 | 0.198 ± 0.015 | 0.214 ± 0.018 | 0.2072 ± 0.0036 | 0.241 ± 0.003 | 0.251 ± 0.0037 |
| SMI | 0.804 ± 0.025 | 0.599 ± 0.027 | 0.501 ± 0.025 | 0.357 ± 0.012 | 0.6483 ± 0.0092 | 0.738 ± 0.011 |
| SPTSX | 0.348 ± 0.036 | 0.223 ± 0.017 | 0.262 ± 0.014 | 0.2099 ± 0.0044 | 0.2539 ± 0.0034 | 0.2608 ± 0.0039 |
| SPX | 0.385 ± 0.044 | 0.209 ± 0.017 | 0.236 ± 0.015 | 0.2047 ± 0.0034 | 0.2458 ± 0.0033 | 0.2541 ± 0.0048 |
| TWSE | 0.248 ± 0.025 | 0.159 ± 0.011 | 0.197 ± 0.016 | 0.2054 ± 0.0031 | 0.249 ± 0.0037 | 0.2523 ± 0.0039 |
| UKX | 0.476 ± 0.037 | 0.43 ± 0.02 | 0.452 ± 0.014 | 0.2132 ± 0.0055 | 0.3158 ± 0.0055 | 0.3249 ± 0.0057 |
| Max Weight | Mean Retention | |||||
| N = 1000 | = 0 | = 1000 | = 10,000 | = 0 | = 1000 | = 10,000 |
| CAC | 0.711 ± 0.037 | 0.524 ± 0.026 | 0.502 ± 0.024 | 0.2208 ± 0.0097 | 0.5016 ± 0.0098 | 0.5695 ± 0.0095 |
| DAX | 0.93 ± 0.04 | 0.568 ± 0.027 | 0.605 ± 0.027 | 0.2195 ± 0.0097 | 0.49 ± 0.008 | 0.5488 ± 0.0092 |
| HSI | 0.793 ± 0.026 | 0.462 ± 0.017 | 0.47 ± 0.02 | 0.209 ± 0.006 | 0.3572 ± 0.0051 | 0.38 ± 0.006 |
| IBEX | 0.832 ± 0.027 | 0.551 ± 0.026 | 0.557 ± 0.033 | 0.24 ± 0.011 | 0.56 ± 0.01 | 0.6378 ± 0.0093 |
| IBOV | 0.523 ± 0.024 | 0.463 ± 0.018 | 0.449 ± 0.018 | 0.2071 ± 0.0067 | 0.3478 ± 0.0057 | 0.3732 ± 0.0067 |
| IPSA | 0.9972 ± 0.0056 | 0.606 ± 0.027 | 0.63 ± 0.027 | 0.26 ± 0.011 | 0.568 ± 0.0089 | 0.61 ± 0.01 |
| JALSH | 0.271 ± 0.032 | 0.35 ± 0.02 | 0.38 ± 0.014 | 0.2129 ± 0.0059 | 0.303 ± 0.005 | 0.3204 ± 0.0053 |
| MERVAL | 0.9597 ± 0.0034 | 0.613 ± 0.023 | 0.583 ± 0.021 | 0.259 ± 0.012 | 0.714 ± 0.013 | 0.773 ± 0.015 |
| NKY | 0.324 ± 0.033 | 0.232 ± 0.012 | 0.2529 ± 0.0096 | 0.2161 ± 0.0047 | 0.273 ± 0.003 | 0.2789 ± 0.0034 |
| SENSEX | 0.635 ± 0.026 | 0.533 ± 0.018 | 0.484 ± 0.021 | 0.29 ± 0.01 | 0.587 ± 0.011 | 0.659 ± 0.013 |
| SHSZ300 | 0.812 ± 0.017 | 0.219 ± 0.013 | 0.237 ± 0.015 | 0.2048 ± 0.0041 | 0.2527 ± 0.0033 | 0.2603 ± 0.0031 |
| SMI | 0.75 ± 0.029 | 0.435 ± 0.023 | 0.437 ± 0.019 | 0.37 ± 0.0099 | 0.75 ± 0.011 | 0.837 ± 0.012 |
| SPTSX | 0.38 ± 0.047 | 0.262 ± 0.021 | 0.256 ± 0.011 | 0.2086 ± 0.0043 | 0.261 ± 0.0044 | 0.2728 ± 0.0044 |
| SPX | 0.44 ± 0.057 | 0.236 ± 0.019 | 0.25 ± 0.015 | 0.205 ± 0.0047 | 0.2583 ± 0.0037 | 0.2647 ± 0.0032 |
| TWSE | 0.277 ± 0.025 | 0.195 ± 0.012 | 0.226 ± 0.011 | 0.2089 ± 0.0043 | 0.2633 ± 0.0044 | 0.2682 ± 0.0041 |
| UKX | 0.51 ± 0.031 | 0.375 ± 0.017 | 0.385 ± 0.013 | 0.2154 ± 0.0056 | 0.3268 ± 0.0061 | 0.3546 ± 0.0051 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamilton-Russell, L.; O’Callaghan, T.M.; Savin, D.; Schlögl, E. Modifying Sequential Monte Carlo Optimisation for Index Tracking to Allow for Transaction Costs. Risks 2024, 12, 155. https://doi.org/10.3390/risks12100155
Hamilton-Russell L, O’Callaghan TM, Savin D, Schlögl E. Modifying Sequential Monte Carlo Optimisation for Index Tracking to Allow for Transaction Costs. Risks. 2024; 12(10):155. https://doi.org/10.3390/risks12100155
Chicago/Turabian StyleHamilton-Russell, Leila, Thomas Malan O’Callaghan, Dmitrii Savin, and Erik Schlögl. 2024. "Modifying Sequential Monte Carlo Optimisation for Index Tracking to Allow for Transaction Costs" Risks 12, no. 10: 155. https://doi.org/10.3390/risks12100155
APA StyleHamilton-Russell, L., O’Callaghan, T. M., Savin, D., & Schlögl, E. (2024). Modifying Sequential Monte Carlo Optimisation for Index Tracking to Allow for Transaction Costs. Risks, 12(10), 155. https://doi.org/10.3390/risks12100155