

Unmanned Aerial Vehicle in the Logistics of Pandemic Vaccination: An Exact Analytical Approach for Any Number of Vaccination Centres

Abstract
:1. Introduction
2. Literature Review: Use of Drones in Healthcare
3. Strategy, Hypotheses and Notations
3.1. Strategy
- (i)
- We divide the territorial area into M zones constituting M concentric circular bands with the same width.
- (ii)
- Each band is divided into n isometric districts where the centre of each one of them is chosen as the vaccination center Thus, the set of vaccination centres in a given zone, are located on the vertices of a regular n-polygon.
- (iii)
- Each vaccination centre deals with the vaccination of people living in its own district.
- (iv)
- All vaccination centres belonging to the same zone (circular band, see Figure 1), are served independently from the others.
3.2. Hypotheses
- 1-
- The drones’ platform, namely the starting and finishing points of the drones, is located on the centre of the considered territorial area which coincides with the common circumcenter of the circumcircles of regular polygons locating all the vaccination centres.
- 2-
- The drone is a single model. So, the load capacity is the same and fixed.
- 3-
- The drone batteries are fully charged before leaving the platform. The charge is enough to satisfy the maximum centres, according to the drone load capacity.
- 4-
- The vaccination centres make the same demands.
- 5-
- The vaccines are stored within appropriate and efficient conditions during the transportation.
- 6-
- Each trip is composed of segments (edges and radius of the n-polygon) interconnecting the locations, measured by the Euclidean distance between them. They are crossed at constant speed by the drone which is independent of its load capacity.
- 7-
- Each vaccination centre must be served only by one drone.
- 8-
- For a given range of vaccination centres demands, only optimum numbers of drones are used to cover the entire demands.
- 9-
- For a given range of vaccination centres demands, there is at least one drone that satisfies a maximum number of centres.
3.3. Notation
| M | Number of zones (circular bands) covering the entire territorial area concerned by vaccination. |
| n | number of vaccination centres belonging to the same zone. |
| d | Quantity of vaccines demanded by vaccination centre. |
| C | Load capacity of the drone |
| N | optimum number of drones used for the logistic distribution. |
| (k1, k2, …, kN)/k1 k2 , …, kN, with , where ki is the number of vaccinations centres visited by the ith drone. | |
| k1(d) | denotes the maximum number of vaccination centres that one drone can serve, according to the domain D of d. |
| G = {n, N, (k1, k2, …, kN)} | Graph defining the set of paths followed by the N drones in order to deliver vaccines to the n vaccinations centres belonging the same zone. For instance, the path described by the ith drone is formed by the set of locations or vertices to be visited and the set of directed links connecting them. |
| 2 r | The radius of the first zone. It represents also the width of circular bands. |
4. Drone Routing Problem for Fixed Number of Vaccination Centres
4.1. Optimum Number of Drones and Vaccination Centre Demands
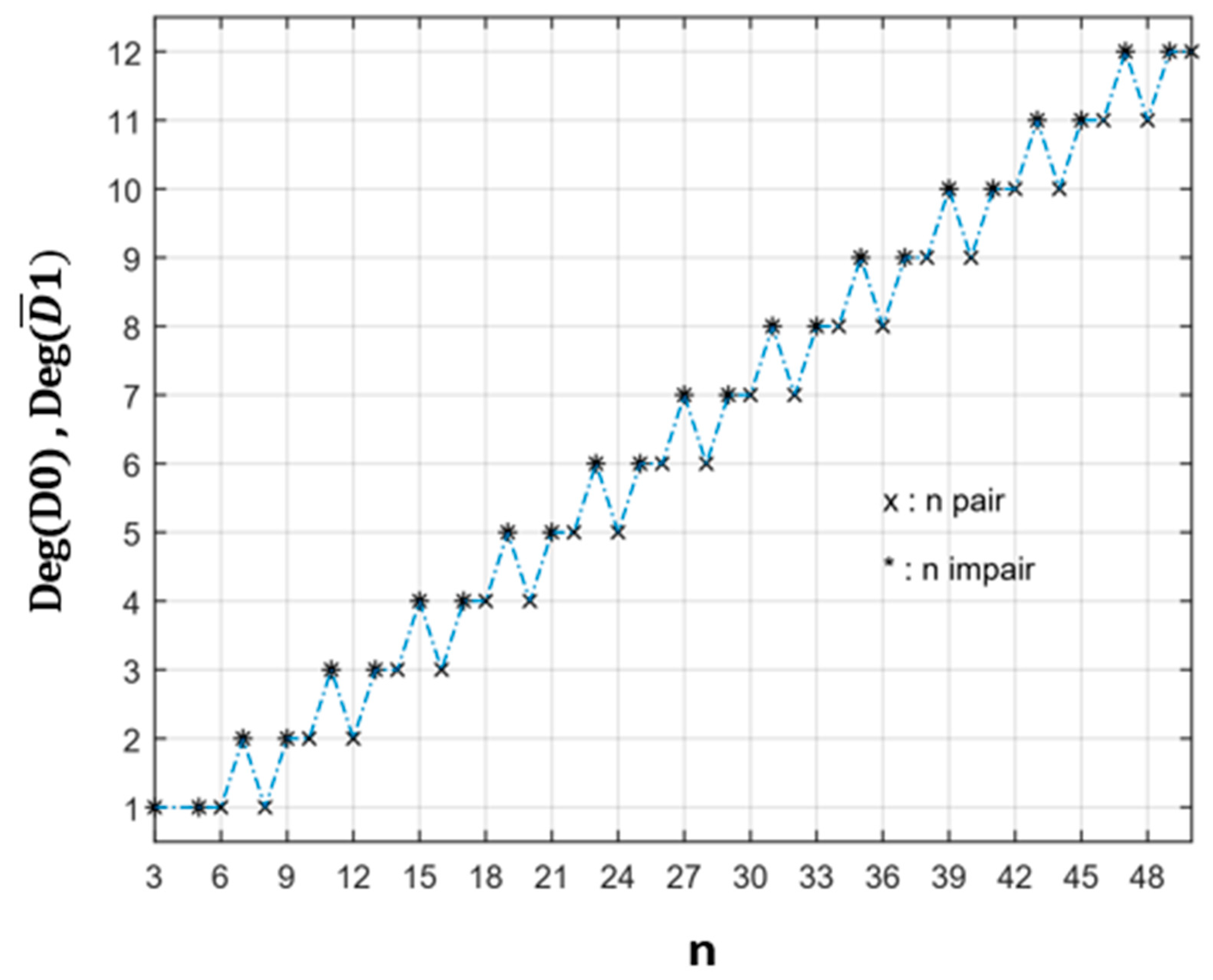
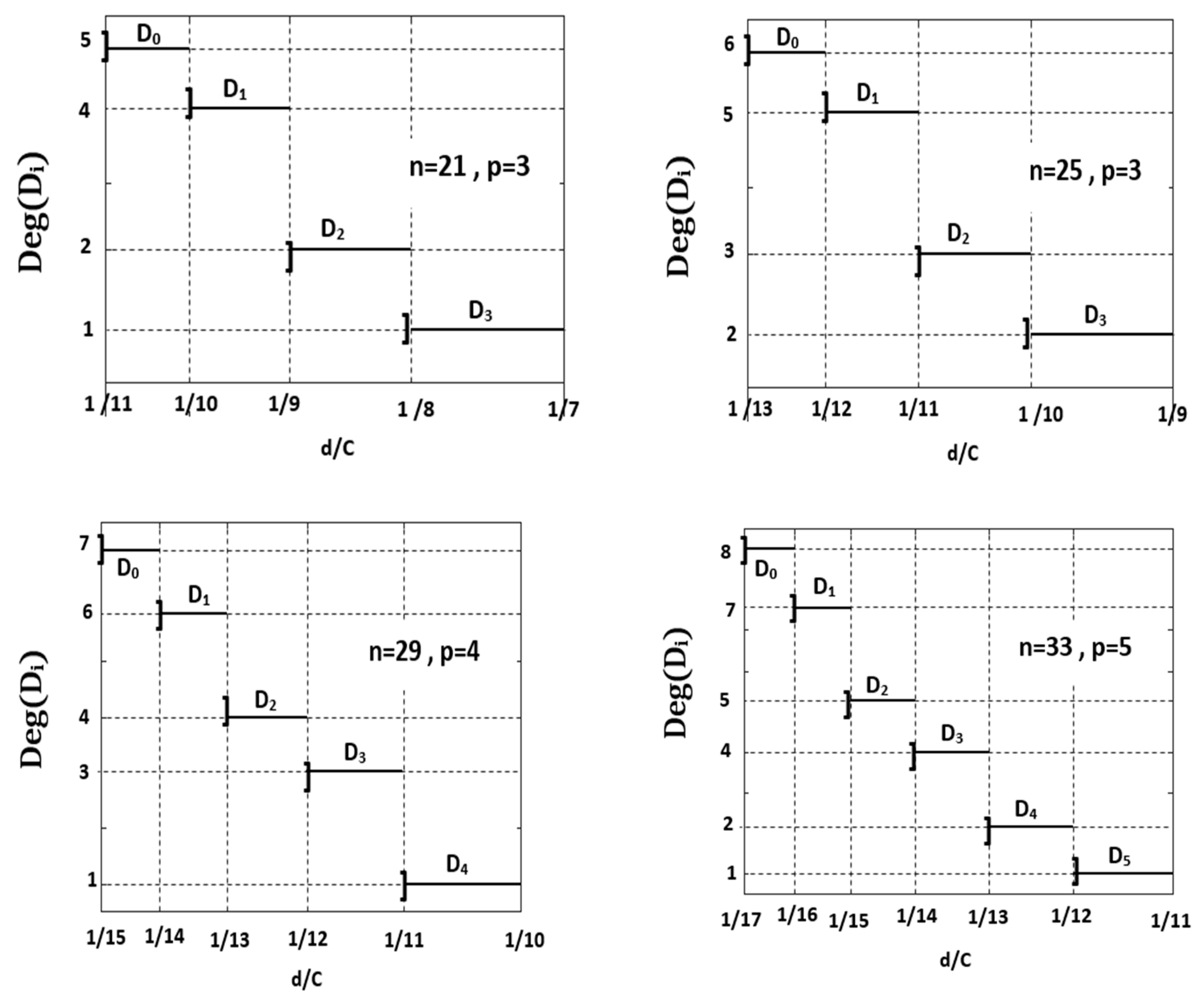
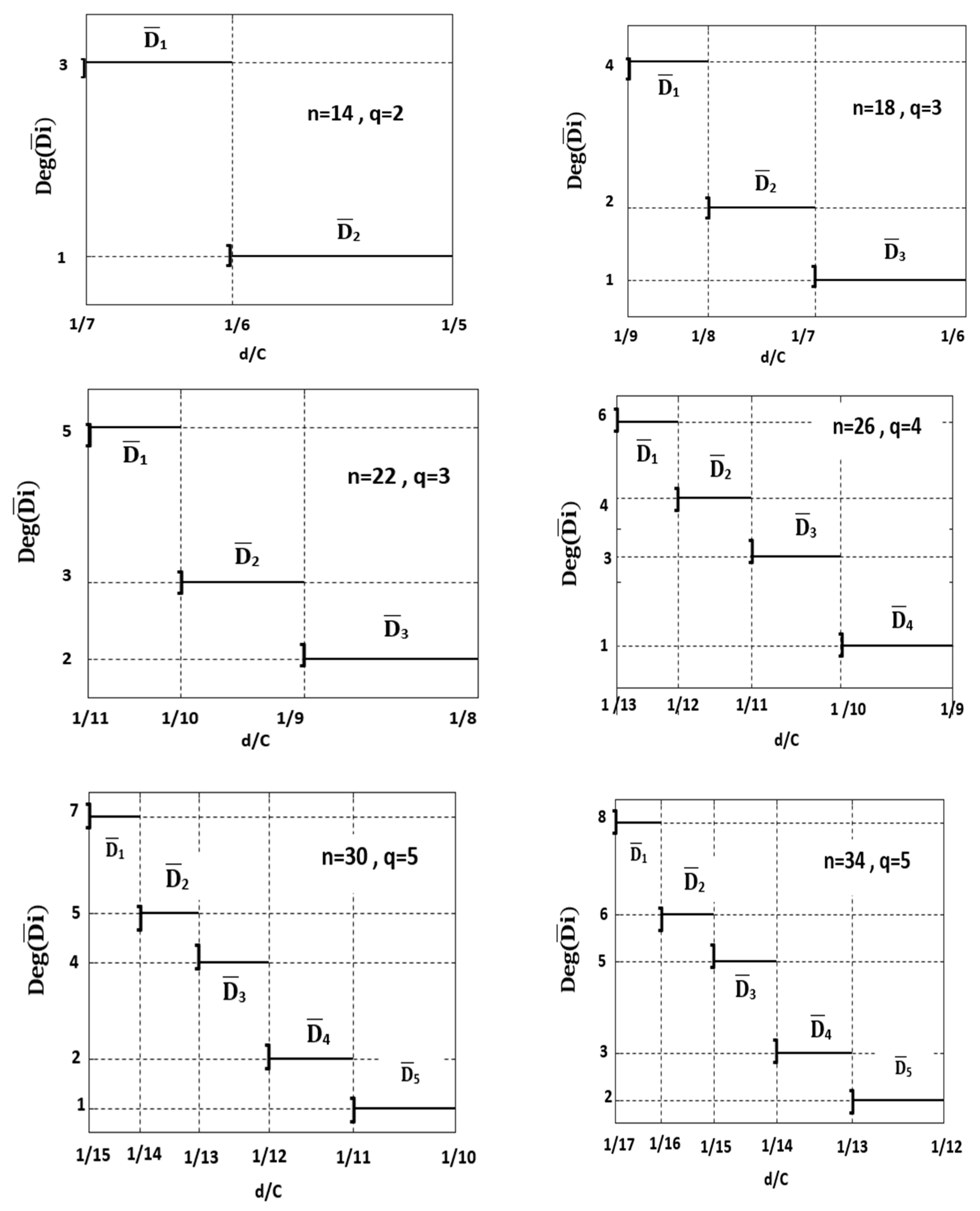
4.2. Degeneracy of the Domains of Vaccination Centres Demands
- (i)
- For N = 2, we obtain

- (ii)
- For N = 3, we obtain


| Deg(n = 18, N = 3, D) = 4, | G{n = 18, N = 3, (8, 8, 2)}, G{n = 18, N = 3, (8, 7, 3)}, |
| G{n = 18, N = 3, (8, 6, 4)},G{n = 18, N = 3, (8, 5, 5)}. | |
| Deg(n = 18, N = 3, D) = 2, | G{n = 18, N = 3, (7, 7, 4)}, G{n = 18, N = 3, (7, 6, 5)}. |
| Deg(n = 18, N = 3, D) = 1, | G{n = 18, N = 3, (6, 6, 6)}. |
| Deg(n = 21, N = 3, D) = 5, | G{n = 21, N = 3, (10, 10, 1)}, G{n = 21, N = 3, (10, 9, 2)}, |
| G{n = 21, N = 3, (10, 8, 3)}, G{n = 21, N = 3, (10, 7, 4)}, | |
| G{n = 21, N = 3, (10, 6, 5)}. | |
| Deg(n = 21, N = 3, D) = 4, | G{n = 21, N = 3, (9, 9, 3)}, G{n = 21, N = 3, (9, 8, 4)}, |
| G{n = 21, N = 3, (9, 7, 5)}, G{n = 21, N = 3, (9, 6, 6)} | |
| Deg(n = 21, N = 3, D) = 2, | G{n = 21, N = 3, (8, 8, 5)}, G{n = 21, N = 3, (8, 7, 6)}. |
| Deg(n = 21, N = 3, D) = 1, | G{n = 21, N = 3, (7, 7, 7)}. |
| Deg(n =24, N = 3, D) = 5, | G{n = 24, N = 3, (11, 11, 2)}, G{n = 24, N = 3, (11, 10, 3)}, |
| G{n = 24, N = 3, (11, 9, 4)}, G{n = 24, N = 3, (11, 8, 5)}, | |
| G{n = 24, N = 3, (11, 7, 6)}. | |
| Deg(n = 24, N = 3, D) = 4, | G{n = 24, N = 3, (10, 10, 4)}, G{n = 24, N = 3, (10, 9, 5)}, |
| G{n = 24, N = 3, (10, 8, 6)}, G{n = 24, N = 3, (10, 7, 7)} | |
| Deg(n = 24, N = 3, D) = 2, | G{n = 24, N = 3, (9, 9, 6)}, G{n = 24, N = 3, (9, 8, 7)}. |
| Deg(n = 24, N = 3, D) = 1, | G{n = 24, N = 3, (8, 8, 8)}. |
| Deg(n =27, N = 3, D) = 7, | G{n = 27, N = 3, (13, 13, 1)}, G{n = 27, N = 3, (13, 12, 2)}, |
| G{n = 27, N = 3, (13, 11, 3)},G{n = 27, N = 3, (13, 10, 4)}, | |
| G{n = 27, N = 3, (13, 9, 5)}, G{n = 27, N = 3, (13, 8, 6)}, | |
| G{n = 27, N = 3, (13, 7, 7)}. | |
| Deg(n=27, N = 3, D) = 5, | G{n = 27, N = 3, (12, 12, 3)}, G{n = 27, N = 3, (12, 11, 4)}, |
| G{n = 27, N = 3, (12, 10, 5)}, G{n = 27, N = 3, (12, 9, 6)}, | |
| G{n = 27, N = 3, (12, 8, 7)}. | |
| Deg(n= 27, N = 3, D) = 4, | G{n = 27, N = 3, (11, 11, 5)}, G{n = 27, N = 3, (11, 10, 6)}, |
| G{n = 27, N = 3, (11, 9, 7)}, G{n = 27, N = 3, (11, 8, 8)}. | |
| Deg(n = 27, N = 3, D) = 2, | G{n = 2, N = 3, (10, 10, 7)}, G{n = 27, N = 3, (10, 9, 8)}. |
| Deg(n = 27, N = 3, D) = 1, | G{n = 27, N = 3, (9, 9, 9)}. |
5. Drone Routing Problem for Any Number of Vaccination Centres
5.1. General Expressions of Demand Domains and Their Corresponding Graphs
- (a)
- For odd numbers n ≥ 3
| Domains: D | Equivalent graphs |
| D0( | G{n, N = 3, (,} |
| G{n, N = 3, (,} | |
| |, with m = { | |
| G{n, N = 3, (,} | |
| D1( | G{n, N = 3, (,} |
| G{n, N = 3, (,} | |
| |, with m = { | |
| G{n, N = 3, (,} | |
| D2( | G{n, N = 3, (,} |
| G{n, N = 3, (,} | |
| |, with m = { | |
| G{n, N =3, (,} | |
| D3( | G{n, N = 3, (,} |
| G{n, N = 3, (,} | |
| |, with m = { | |
| G{n, N = 3, (,} | |
| Dp( | G{n, N = 3, (,} |
| G{n, N = 3, (,} | |
| |, with m = { | |
| G{n, N = 3, (,} |
- (b) For even numbers n ≥ 6
| Domains: | Equivalent graphs |
| ( | G{n, N = 3, (,} |
| G{n, N = 3, (,} | |
| |, with m = { | |
| G{n, N = 3, (,} | |
| ( | G{n, N = 3, (,} |
| G{n, N = 3, (,} | |
| |, with m = { | |
| G{n, N = 3, (,} | |
| ( | G{n, N = 3, (,} |
| G{n, N = 3, (,} | |
| |, with m = { | |
| G{n, N = 3, (,} | |
| ( | G{n, N = 3, (,} |
| G{n, N = 3, (,} | |
| |, with m = { | |
| G{n, N = 3, (,} |
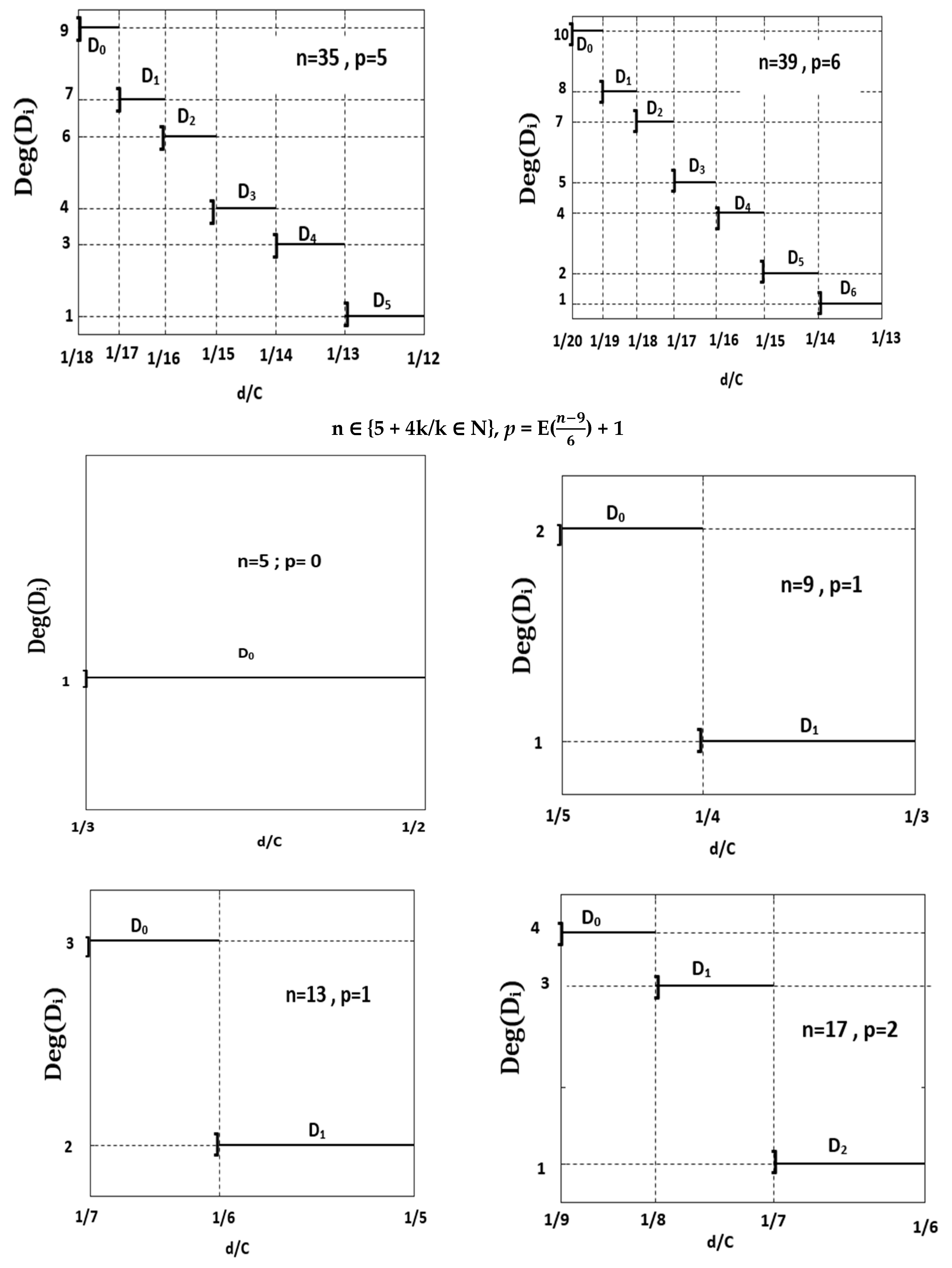
5.2. General Expressions of the Domain Degeneracy
- (i)
- ForDℓ denotes the domain:where
- (ii)
- ForDℓ denotes the domain:where .
- (i)
- Forℓ denotes the domain:where
- (ii)
- Forℓ denotes the domain:where .
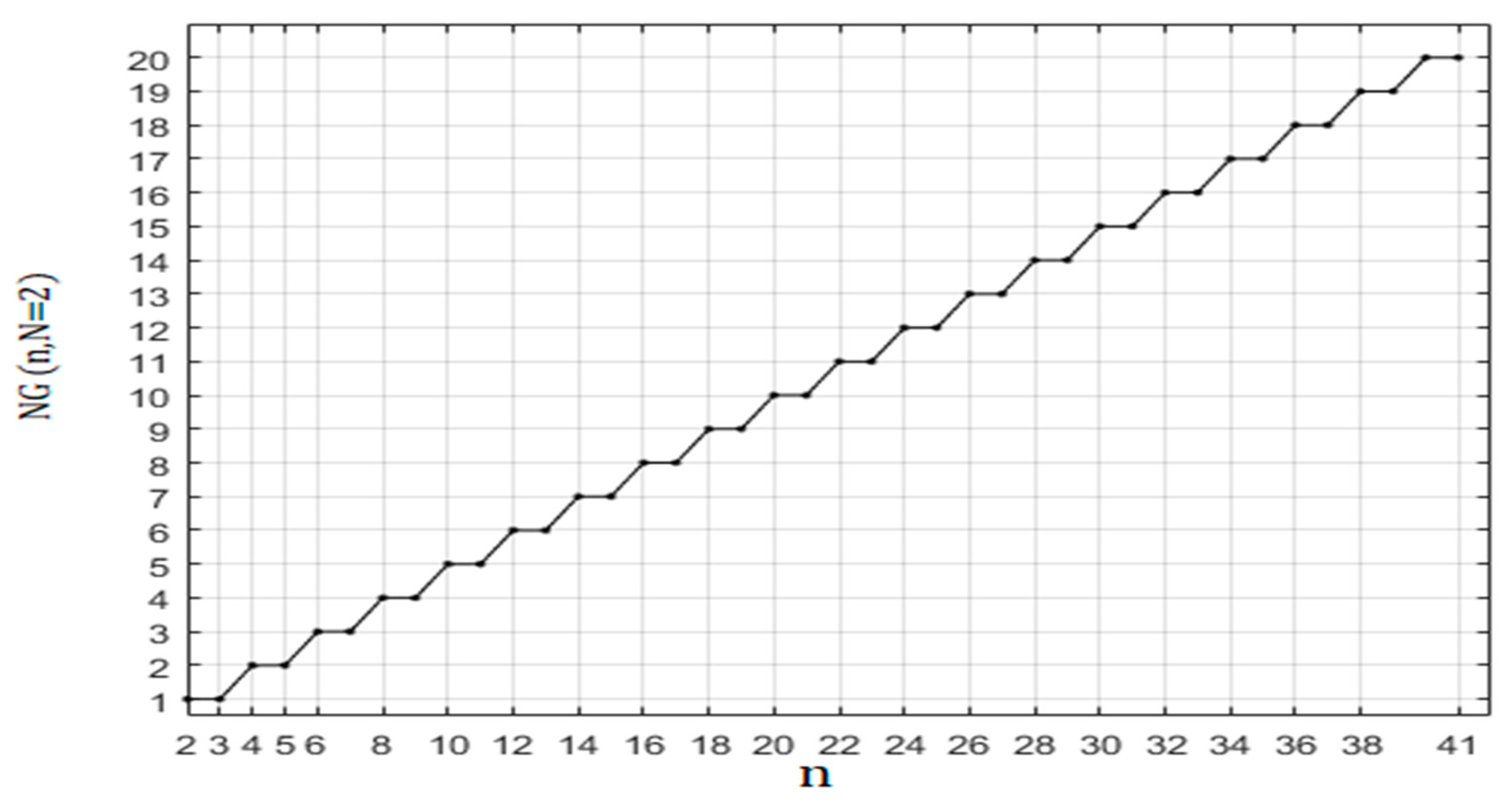
5.3. General Expressions of the Number of Graphs (Different Paths) Using an Optimum Number N of Drones for Logistics Distribution
- (a)
- General expressions of the number of graphs (paths) when the optimal number of drones is 2 (N = 2)
| (i) For odd n | |
| Domain | Corresponding graph |
| ( | G{n, N = 2, (,1} |
| ( | G{n, N = 2, (,2} |
| ( | G{n, N = 2, (,3} |
| ( | G{n, N = 2, (} |
| (ii) For even n | |
| Domain | Corresponding graph |
| ( | G{n, N = 2, (,1} |
| ( | G{n, N = 2, (,2} |
| ( | G{n, N = 2, (,3} |
| ( | G{n, N = 2, (} |
- (i)
- for odd n
- (ii)
- for even n.
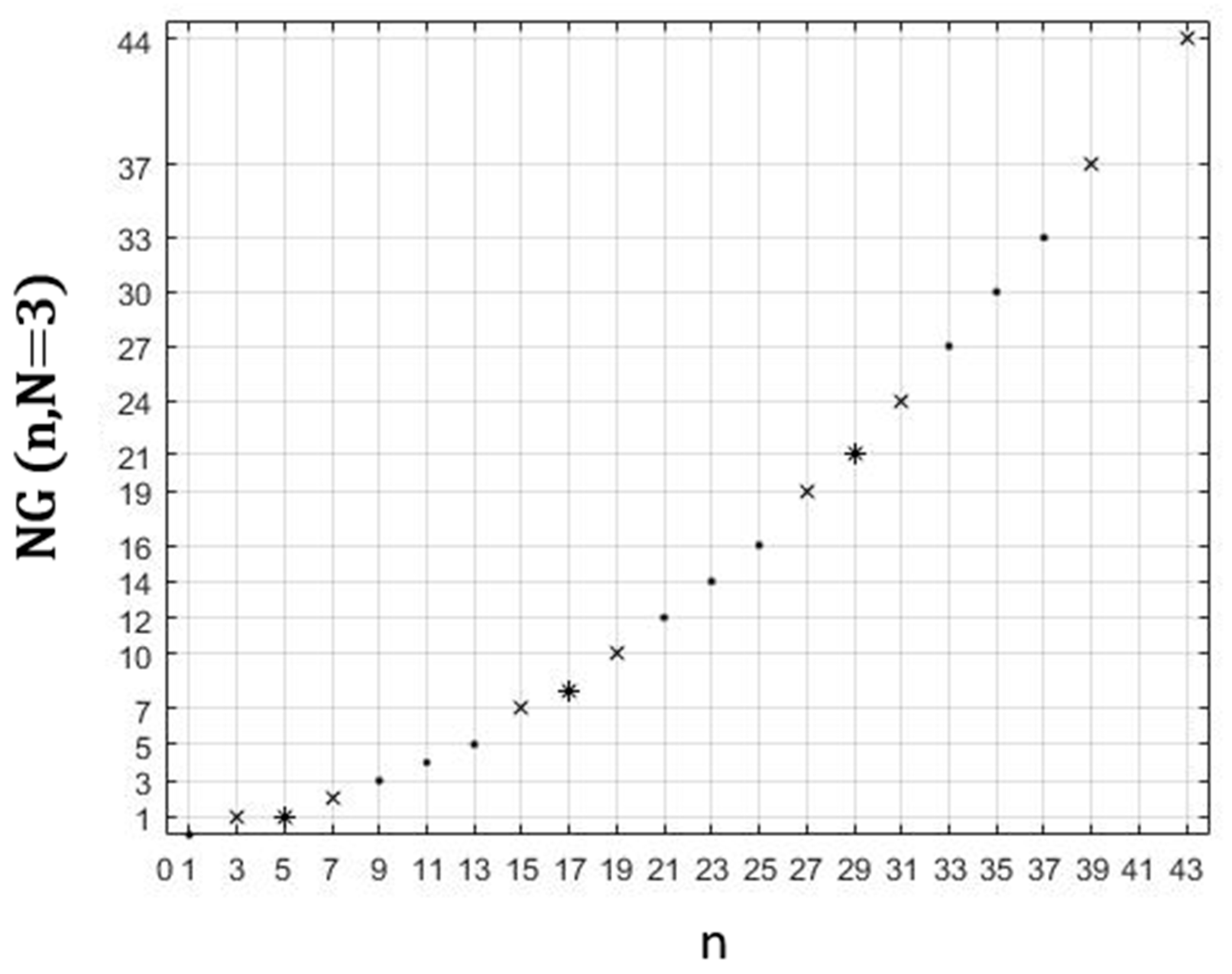
- (b)
- General expressions of the number of graphs (paths) when the optimal number of drones is 3 (N = 3)
- (i)
- , for odd n, with +1
- (ii)
- , for even n, with .
- -
- For odd n
- -
- ,
- -
- ,
- -
- ,
- -
- For even n
- (iii)
- ,
- (iv)
- ,
- (v)
- ,
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| n = 5 | ||||
| d/C | N | Graphs | ||
| 5 | 1 |  G = {n = 5, N = 1, (5)} G = {n = 5, N = 1, (5)} | 20.106 r | |
| 4 | 2 |  G = {n = 5, N = 2, (4, 1)} G = {n = 5, N = 2, (4, 1)} | 22.580 r | |
| 3 | 2 |  G = {n = 5, N = 2, (3, 2)} G = {n = 5, N = 2, (3, 2)} | ||
| 2 | 3 |  G={n = 5, N = 3, (2, 2, 1)} G={n = 5, N = 3, (2, 2, 1)} | 25.053 r | |
| 1 | 5 |  G = {n = 5, N = 5, (1, 1, 1, 1, 1)} G = {n = 5, N = 5, (1, 1, 1, 1, 1)} | 30 r | |
| n = 6 | ||||
| d/C | N | Graphs | ||
| 6 | 1 |  G = {n = 6, N = 1,(6)} G = {n = 6, N = 1,(6)} | 35 r | |
| 5 | 2 |  G = {n = 6,N = 2, (5, 1)} G = {n = 6,N = 2, (5, 1)} | 40 r | |
| 4 | 2 |  G = {n = 6, N = 2, (4, 2)} G = {n = 6, N = 2, (4, 2)} | ||
| 3 | 2 |  G = {n = 6, N = 2, (3, 3)} G = {n = 6, N = 2, (3, 3)} | ||
| 2 | 3 |  G = {n = 6, N = 3, (2, 2, 2)} G = {n = 6, N = 3, (2, 2, 2)} | 45 r | |
| 1 | 6 |  G = {n = 6, N = 6, (1, 1, 1, 1, 1, 1)} G = {n = 6, N = 6, (1, 1, 1, 1, 1, 1)} | 60 r | |

Appendix B




Appendix C




References
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 70–85. [Google Scholar] [CrossRef] [Green Version]
- Goodchild, A.; Toy, J. Delivery by drone: An evaluation of unmanned aerial vehicle technology in reducing CO2 emissions in the delivery service industry. Transport. Res. Part D Transp. Environ. 2018, 61, 58–67. [Google Scholar] [CrossRef]
- Amazon.com, Inc. Amazon Prime. 2016. Available online: http://www.amazon.com/primeair (accessed on 3 July 2022).
- DHL International GmbH. DHL Parcelcopter Launches Initial Operations for Research Purposes. Available online: http://www.dhl.com/en/press/releases/ (accessed on 22 June 2022).
- Stewart, J. Google Tests Drone Deliveries in Project Wing Trials. BBC. Available online: http://www.bbc.com/news/technology-28964260 (accessed on 29 June 2022).
- Dillow, C. Meet Matternet, the Drone Delivery Startup Thats Actually Delivering. Fortune. Available online: http://fortune.com/2015/05/01/matternet-drone-delivery/ (accessed on 1 May 2022).
- Haidari, L.A.; Brown, S.T.; Ferguson, M.; Bancroft, E.; Spiker, M.; Wilcox, A.; Ambikapathi, R.; Sampath, V.; Connor, D.L.; Lee, B.Y. The economic and operational value of using drones to transport vaccines. Vaccine 2016, 34, 4062–4067. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rosser, J.C., Jr.; Vignesh, V.; Terwilliger, B.A.; Parker, B.C. Surgical and medical applications of drones: A comprehensive review. J. Soc. Laparoendosc. Surg. 2018, 22, e2018.00018. [Google Scholar] [CrossRef] [Green Version]
- Wang, D. The economics of drone delivery. IEEE Spectr. 2016. Available online: https://spectrum.ieee.org/automaton/robotics/drones/the-economics-of-drone-delivery (accessed on 5 July 2022).
- Multikopter. Transport und Logistik. 2019. Available online: http://www.multikopter.de/anwendungsgebiete/transport-und-logistik/ (accessed on 11 July 2022).
- Syed, F.; Gupta, S.K.; Alsamhi, S.H.; Rachid, M.; Liu, X. A survey on recent optimal techniques for securing unmanned aerial vehicles applications. Trans. Emerg. Telecommun. Technol. 2020, 32, e4133. [Google Scholar] [CrossRef]
- Ackerman, E.; Koziol, M. In the air with Zipline’s medical delivery drones. IEEE Spectr. 2019, 56, 24–31. Available online: https://spectrum.ieee.org/robotics/drones/in-the-air-with-ziplines-medical-delivery-drones (accessed on 30 April 2022). [CrossRef]
- Morgan, P. Carbon Fibers and Their Composites; ser. Materials Engineering; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Reiter, C. BMW Makes Lone Shift to Carbon Fiber to Gain Auto Edge. Bloomberg. Available online: http://www.bloomberg.com/news/articles/2013-11-14/bmwmakes-lone-shift-to-carbon-fiber-to-gain-auto-edge (accessed on 15 November 2013).
- Reddy, T. Linden’s Handbook of Batteries, 4th ed.; McGraw-Hill Education: New York, NY, USA, 2010. [Google Scholar]
- National Coordination Office for Space-Based Positioning, Navigation, and Timing. GPS.gov: Augmentation Systems. Available online: http://www.gps.gov/systems/augmentations/ (accessed on 24 December 2021).
- Karpenko, S.; Konovalenko, I.; Miller, A.; Miller, B.; Nikolaev, D. UAV control on the basis of 3D landmark bearing-only observations. Sensors 2015, 15, 29802–29820. [Google Scholar] [CrossRef] [Green Version]
- Merz, T.; Kendoul, F. Dependable low-altitude obstacle avoidance for robotic helicopters operating in rural areas. J. Field Robot 2013, 30, 439–471. [Google Scholar] [CrossRef]
- Carloni, R.; Lippiello, V.; D’auria, M.; Fumagalli, M.; Mersha, A.Y.; Stramigioli, S.; Siciliano, B. Robot vision: Obstacle-avoidancetechniques for unmanned aerial vehicles. IEEE Robot. Autom. Mag. 2013, 20, 22–31. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, Ş. Flying ad-hoc networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Li, J.; Zhou, Y.; Lamont, L. Communication architectures and protocols for networking unmanned aerial vehicles. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; pp. 1415–1420. [Google Scholar]
- Scott, J.E.; Scott, C.H. U. of Colorado Denver, U.U. of California Irvine, and USA. Drone delivery models for healthcare. In Proceedings of the 50th Hawaii International Conference on System Sciences, Honolulu, HI, USA, 4–7 January 2017. [Google Scholar]
- Rabta, B.; Wankmuller, C.; Reiner, G. A drone fleet model for last-mile distribution in disaster relief operations. Int. J. Disaster Risk Reduct 2018, 28, 107–112. [Google Scholar] [CrossRef]
- Manyam, S.G.; Sundar, K.; Casbeer, D.W. Cooperative Routing for an Air-Ground Vehicle Team—Exact Algorithm, Transformation Method, and Heuristics. arXiv 2018, arXiv:1804.09546. [Google Scholar] [CrossRef] [Green Version]
- Holzmann, P.; Wankmüller, C.; Globocnik, D.; Schwarz, E.J. Drones to the rescue? Exploring rescue workers’ behavioral intention to adopt drones in mountain rescue missions. Int. J. Phys. Distrib. Logist. Manag. 2021. ahead-of-print. [Google Scholar] [CrossRef]
- Wen, T.; Zhang, Z.; Wong, K.K.L. Multi-objective algorithm for blood supply via unmanned aerial vehicles to the wounded in an emergency situation. PLoS ONE 2016, 11, e0155176. [Google Scholar]
- Greaves, R.F.; Bernardini, S.; Ferrari, M.; Fortina, P.; Gouget, B.; Gruson, D.; Lang, T.; Loh, T.P.; Morris, H.A.; Park, J.Y.; et al. Key questions about the future of laboratory medicine in the next decade of the 21st century: A report from the IFCC-Emerging Technologies Division. Clin. Chim. Acta 2019, 495, 570–589. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.; Campbref, J.; Goklen, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (uavx) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Amukele, T.K.; Sokoll, L.J.; Pepper, D.; Howard, D.P.; Street, J. Can unmanned aerial systems (drones) be used for the routine transport of chemistry, hematology, and coagulation laboratory specimens? PLoS ONE 2015, 10, e0134020. [Google Scholar] [CrossRef] [Green Version]
- Amukele, T.; Ness, P.M.; Tobian, A.A.; Boyd, J.; Street, J. Drone transportation of blood products. Transfusion 2017, 57, 582–588. [Google Scholar] [CrossRef]
- Gavi. The Vaccine Alliance. Rwanda Launches World’s First National Drone Delivery Service Powered by Zipline. 2016. Available online: https://www.gavi.org/library/news/gavi-features/2016/rwanda-launches-world-s-firstnational-drone-delivery-service-powered-by-zipline/ (accessed on 14 July 2019).
- UNICEF. Malawi Tests First Unmanned Aerial Vehicle Flights for HIV Early Infant Diagnosis. 2016. Available online: https://www.unicef.org/media/media_90462.html (accessed on 8 February 2019).
- Medecins Sans Fronti Eres. Innovating to Reach Remote TB Patients and Improve Access to Treatment. 2014. Available online: https://www.msf.org/papua-new-guinea-innovating-reach-remote-tb-patients-and-improveaccess-treatment (accessed on 31 December 2016).
- Furer, F. Swiss Post Drone Takes Off again for Healthcare Services. Swiss Post. 2019. Available online: https://post-m-dien.ch/en/swiss-post-dronelost-over-lake-zurich/ (accessed on 26 July 2020).
- Makoye, K. Buzz as World’s Biggest Drone Drug Deliveries Take Off in Tanzania. Reuters. 2017. Available online: https://www.reuters.com/article/ustanzania-health-drones/buzz-as-worlds-biggest-drone-drug-deliveries-takeoff-in-tanzania-idUSKCN1B91F7 (accessed on 17 July 2019).
- Kelland, K. Drones to Deliver Vaccines, Blood and Drugs Across Ghana. Reuters. 2019. Available online: https://af.reuters.com/article/topNews/idAFKCN1S014J-OZATP (accessed on 21 July 2020).
- McNeil, D.G., Jr. An Island Nation’s Health Experiment: Vaccines Delivered by Drone. The New York Times. 2018. Available online: https://www.nytimes.com/2018/12/17/health/vanuatu-vaccines-drones.html (accessed on 17 July 2019).
- Paul, S.K.; Chowdhury, P. A production recovery plan in manufacturing supply chains for a high-demand item during COVID-19. Int. J. Phys. Distrib. Logist. Manag. 2021, 51, 104–125. [Google Scholar] [CrossRef]











| n = 7 | ||||
| d/C | N | Graphs | ||
| 7 | 1 |  G = {n = 7, N = 1, (7)} G = {n = 7, N = 1, (7)} | 50.446 r | |
| 6 | 2 |  G = {n = 7, N = 2, (6, 1)} G = {n = 7, N = 2, (6, 1)} | 58.371 r | |
| 5 | 2 |  G = {n = 7, N = 2, (5, 2)} G = {n = 7, N = 2, (5, 2)} | ||
| 4 | 2 |  G = {n = 7, N = 2, (4, 3)} G = {n = 7, N = 2, (4, 3)} | ||
| 3 | 3 |  G = {n = 7, N = 3, (3, 2, 2)} G = {n = 7, N = 3, (3, 2, 2)} G = {n = 7, N = 3, (3, 3, 1)} G = {n = 7, N = 3, (3, 3, 1)} | 66.297 r | |
| 2 | 4 |  G = {n = 7, N = 4, (2, 2, 2, 1)} G = {n = 7, N = 4, (2, 2, 2, 1)} | 74.223 r | |
| 1 | 7 |  G = {n = 7, N = 7, (1, 1, 1, 1, 1, 1, 1)} G = {n = 7, N = 7, (1, 1, 1, 1, 1, 1, 1)} | 98 r | |
| n = 8 | ||||
| d/C | N | Graphs | ||
| 8 | 1 |  G = {n = 8, N = 1, (8)} G = {n = 8, N = 1, (8)} | 66.218 r | |
| 7 | 2 |  G = {n = 8, N = 2, (7, 1)} G = {n = 8, N = 2, (7, 1)} | 77.329 r | |
| 6 | 2 |  | ||
| 5 | 2 |  | ||
| 4 | 2 |  | ||
| 3 | 3 |  | 88.441 r | |
| 2 | 4 |  G = {n = 8, N = 4, (2, 2, 2, 2)} G = {n = 8, N = 4, (2, 2, 2, 2)} | 99.553 r | |
| 1 | 8 |  G = {n = 8, N = 8, (1, 1, 1, 1, 1, 1, 1, 1)} G = {n = 8, N = 8, (1, 1, 1, 1, 1, 1, 1, 1)} | 144 r | |
| n = 9 | ||||
| d/C | N | Graphs | ||
| 9 | 1 |  G = {n = 9, N = 1, (9)} G = {n = 9, N = 1, (9)} | 82.195 r | |
| 8 | 2 |  G = {n = 9, N = 2, (8, 1)} G = {n = 9, N = 2, (8, 1)} | 96.6711 r | |
| 7 | 2 |  G = {n = 9, N = 2, (7, 2)} G = {n = 9, N = 2, (7, 2)} | ||
| 6 | 2 |  G = {n = 9, N = 2, (6, 3)} G = {n = 9, N = 2, (6, 3)} | ||
| 5 | 2 |  G = {n = 9, N = 2, (5, 4)} G = {n = 9, N = 2, (5, 4)} | ||
| 4 | 3 |   G = {n = 9, N = 3, (4, 4, 1)} G = {n = 9, N = 3, (4, 3, 2)} | 111.146 r | |
| 3 | 3 |  G = {n = 9, N = 3, (3, 3, 3)} G = {n = 9, N = 3, (3, 3, 3)} | ||
| 2 | 5 |  G = {n = 9, N = 5, (2, 2, 2, 2, 1)} G = {n = 9, N = 5, (2, 2, 2, 2, 1)} | 140.097 r | |
| 1 | 9 |  G = {n = 9, N = 9, (1, 1, 1, 1, 1, 1, 1, 1, 1)} G = {n = 9, N = 9, (1, 1, 1, 1, 1, 1, 1, 1, 1)} | 198 r | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benayad, A.; Malasse, O.; Belhadaoui, H.; Benayad, N. Unmanned Aerial Vehicle in the Logistics of Pandemic Vaccination: An Exact Analytical Approach for Any Number of Vaccination Centres. Healthcare 2022, 10, 2102. https://doi.org/10.3390/healthcare10102102
Benayad A, Malasse O, Belhadaoui H, Benayad N. Unmanned Aerial Vehicle in the Logistics of Pandemic Vaccination: An Exact Analytical Approach for Any Number of Vaccination Centres. Healthcare. 2022; 10(10):2102. https://doi.org/10.3390/healthcare10102102
Chicago/Turabian StyleBenayad, Adnan, Olaf Malasse, Hicham Belhadaoui, and Noureddine Benayad. 2022. "Unmanned Aerial Vehicle in the Logistics of Pandemic Vaccination: An Exact Analytical Approach for Any Number of Vaccination Centres" Healthcare 10, no. 10: 2102. https://doi.org/10.3390/healthcare10102102
APA StyleBenayad, A., Malasse, O., Belhadaoui, H., & Benayad, N. (2022). Unmanned Aerial Vehicle in the Logistics of Pandemic Vaccination: An Exact Analytical Approach for Any Number of Vaccination Centres. Healthcare, 10(10), 2102. https://doi.org/10.3390/healthcare10102102