Demonstration of the Effect of Centre of Mass Height on Postural Sway Using Accelerometry for Balance Analysis


Abstract
1. Introduction
2. Hypothesis of the Study
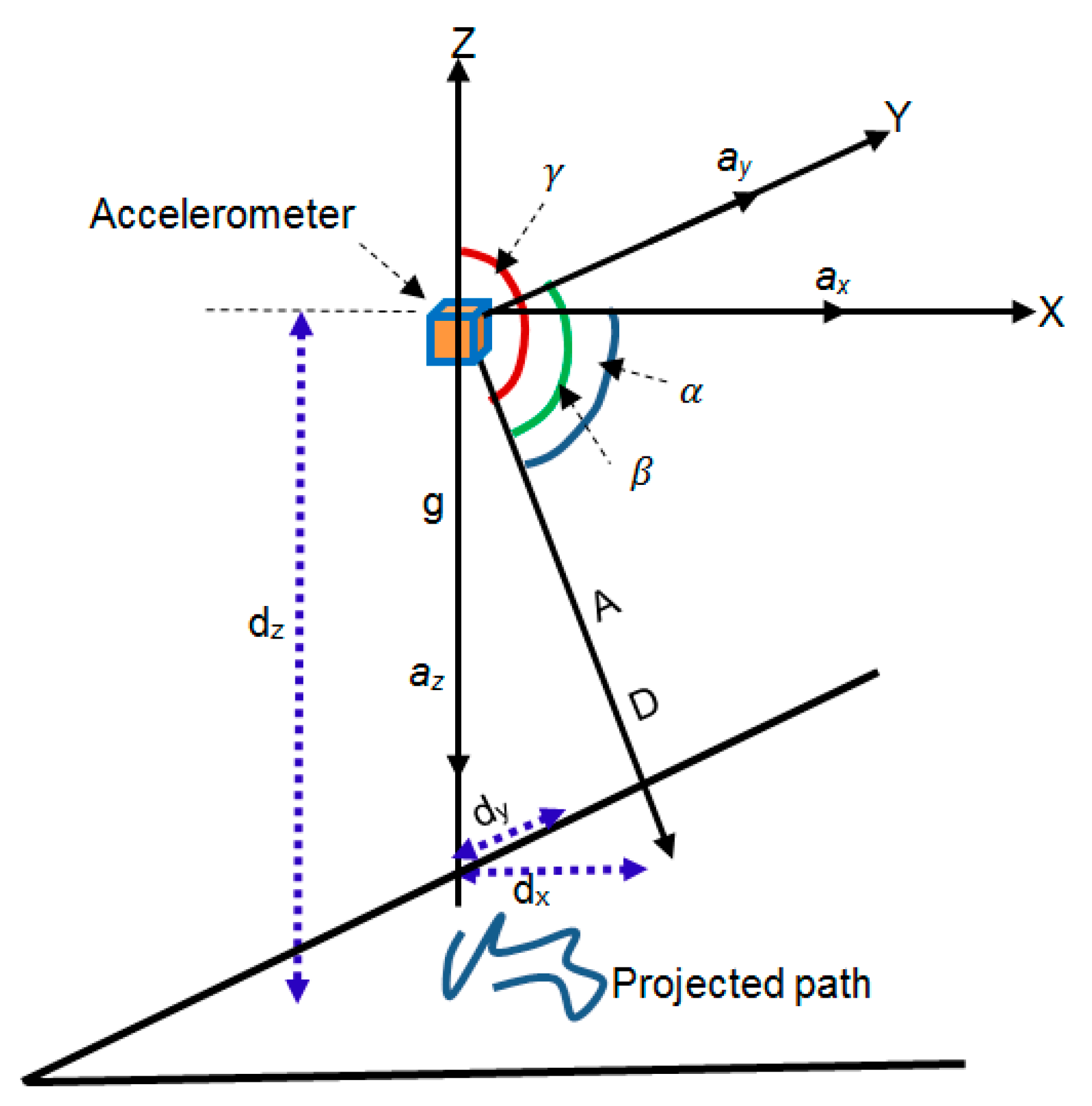
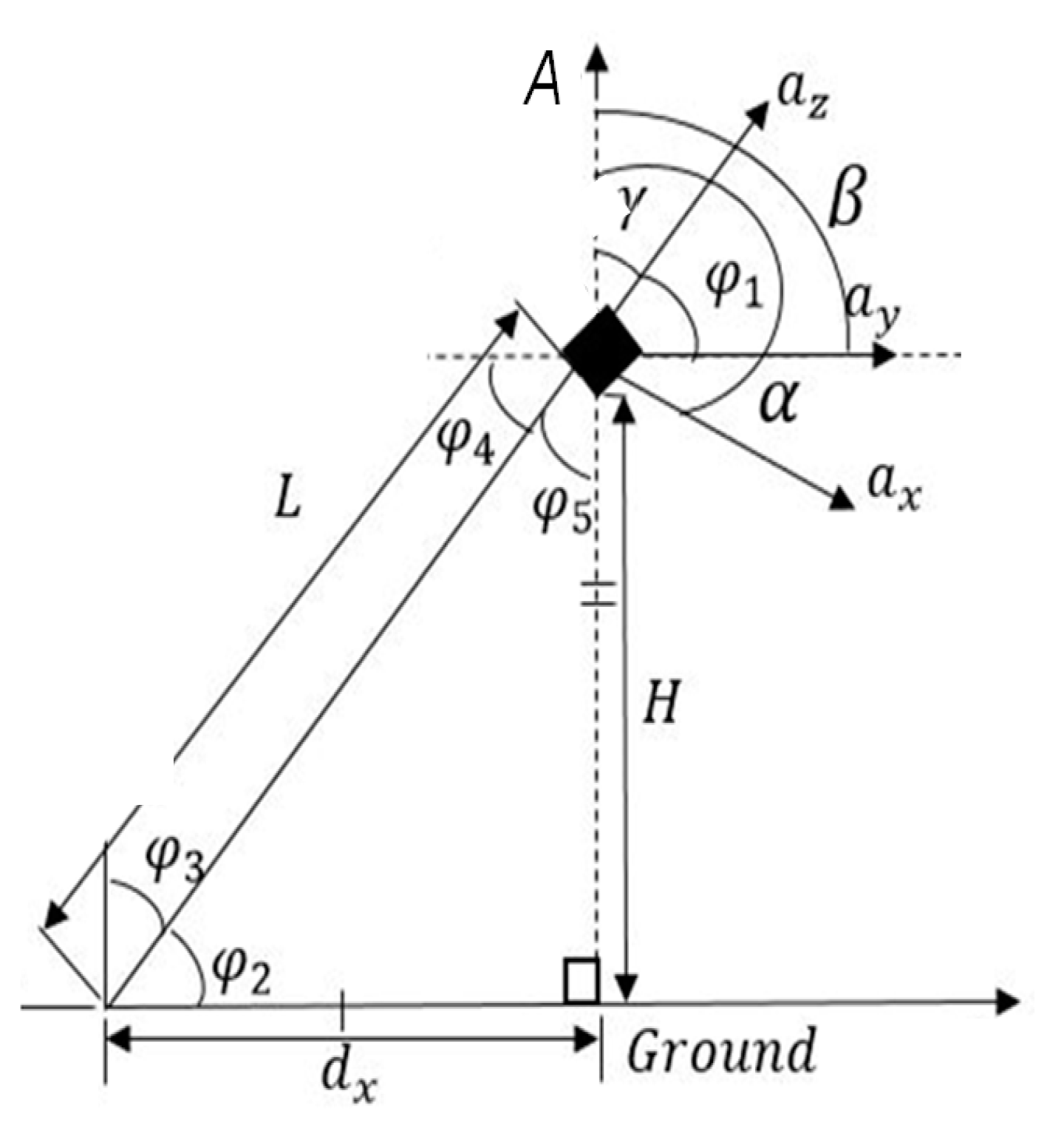
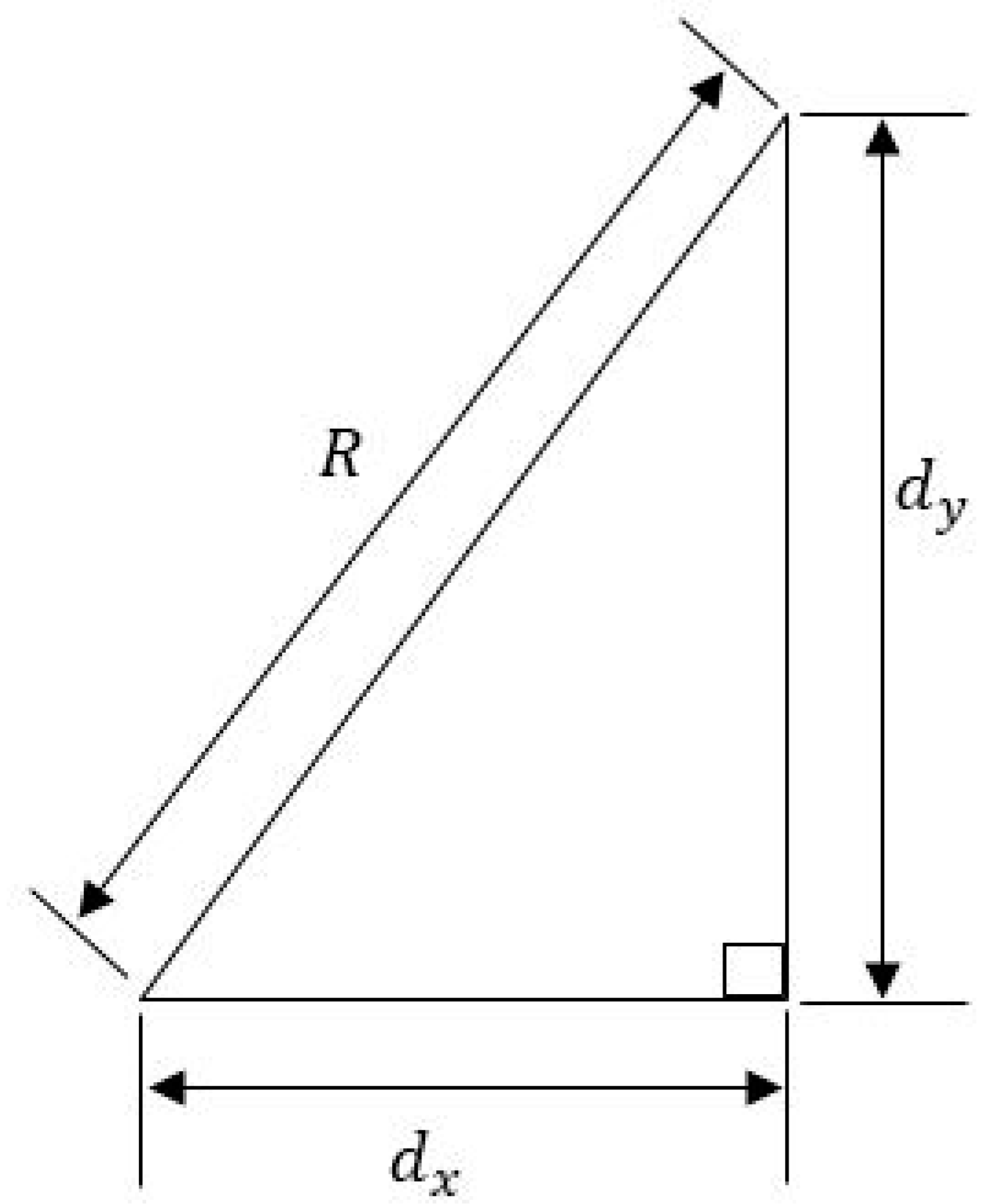
3. Accelerometry-Based Sway Measurement
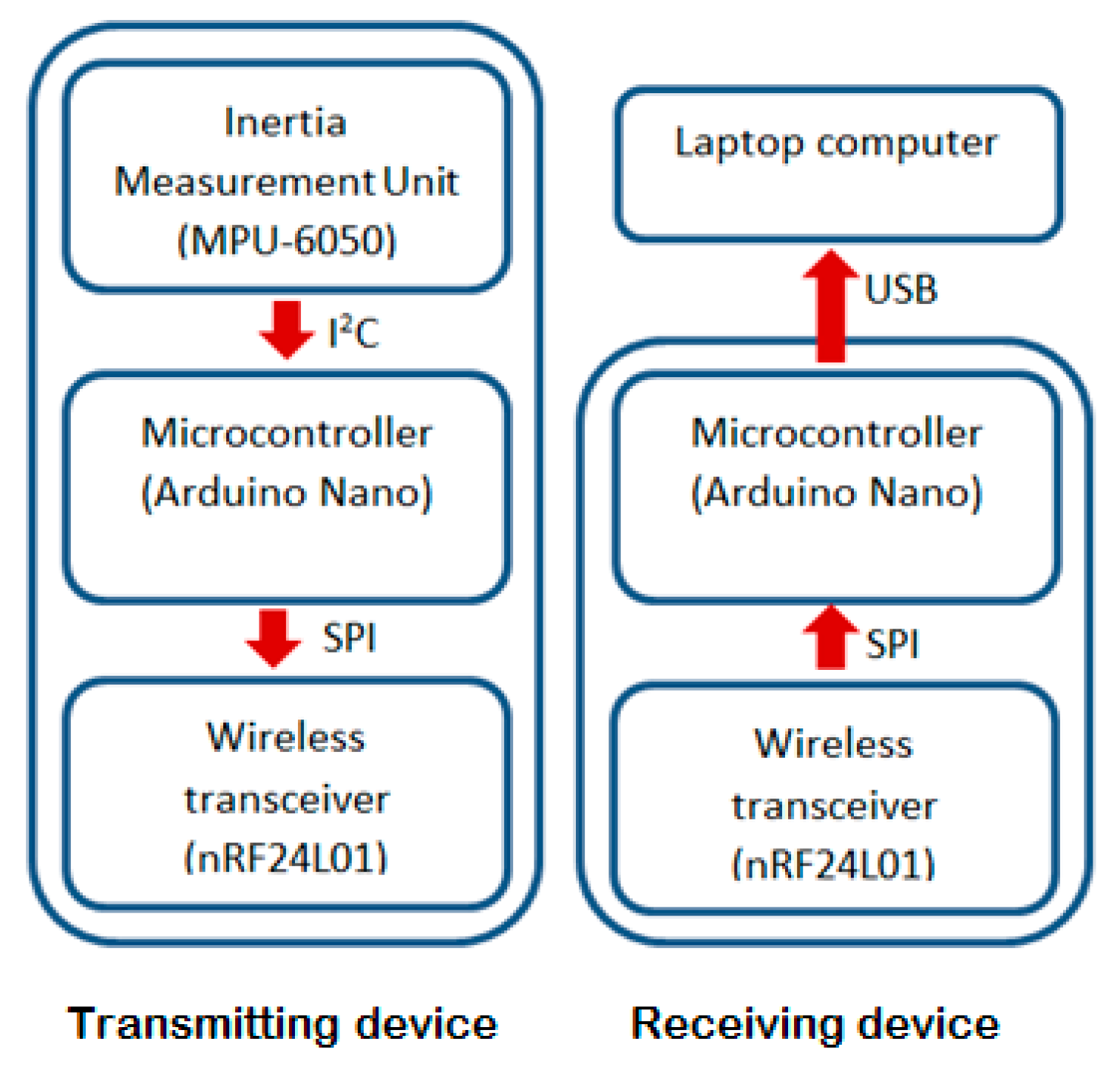
4. Accelerometry Measurement Devices
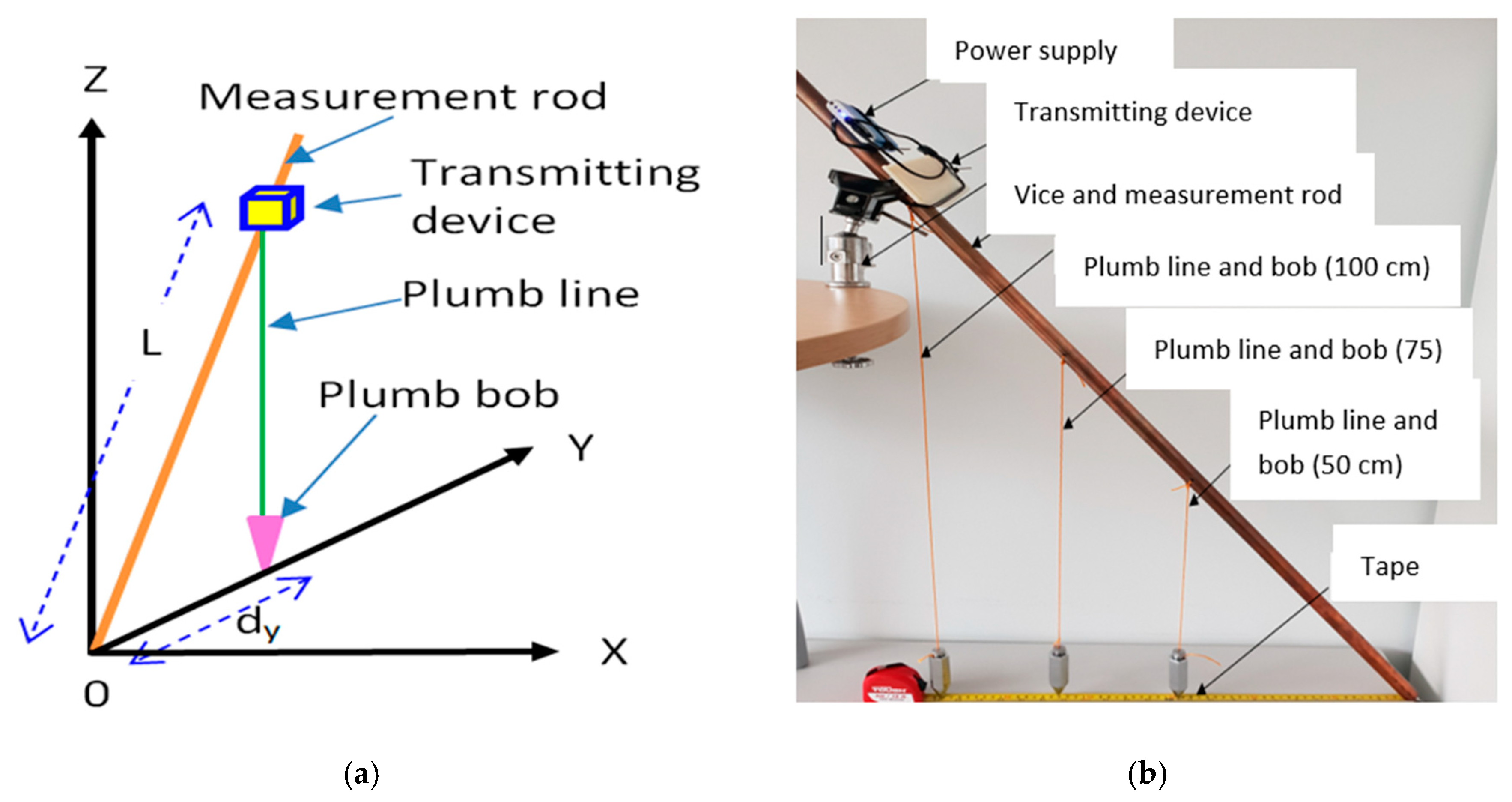
5. Measurement Apparatus
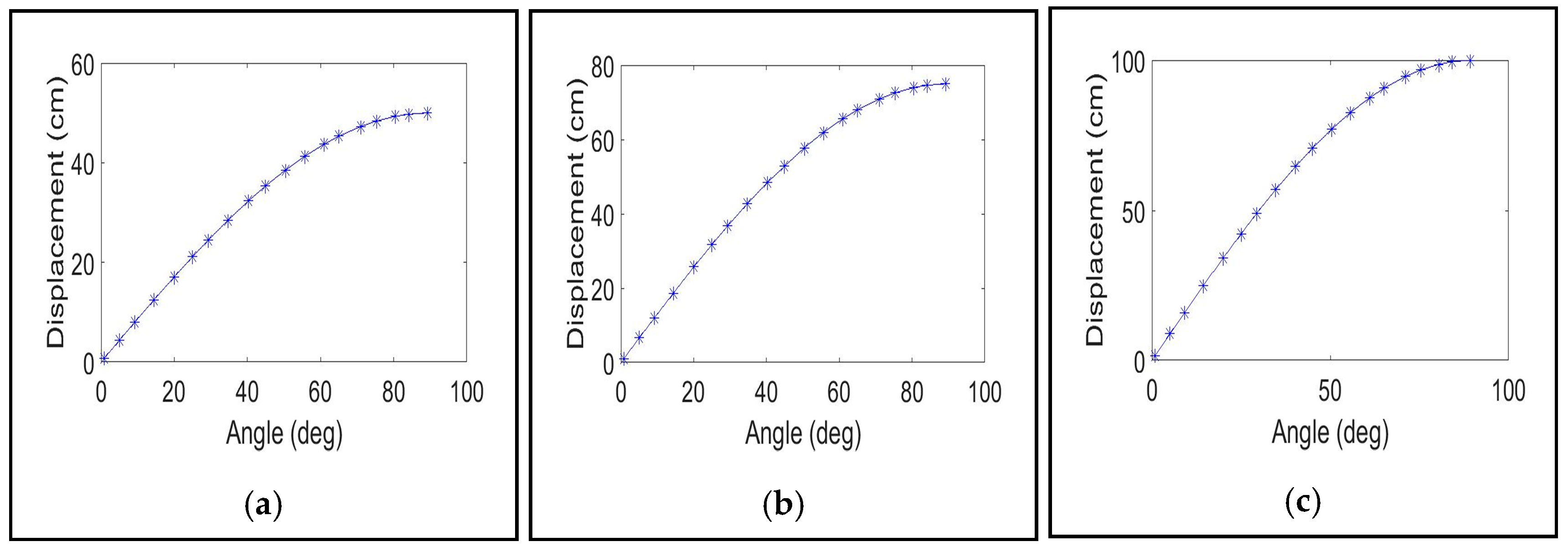
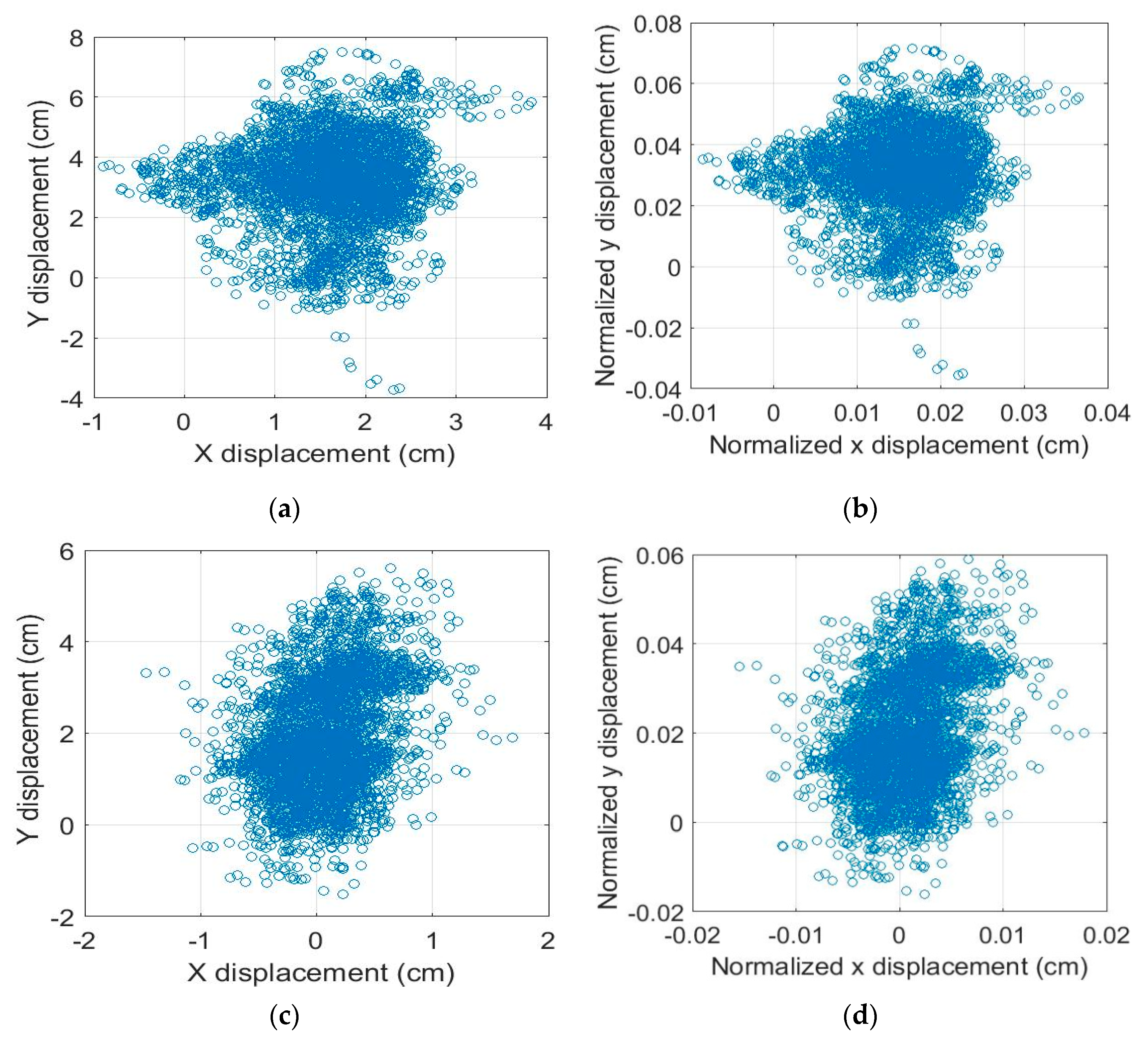
Data Analysis
6. Results and Discussion
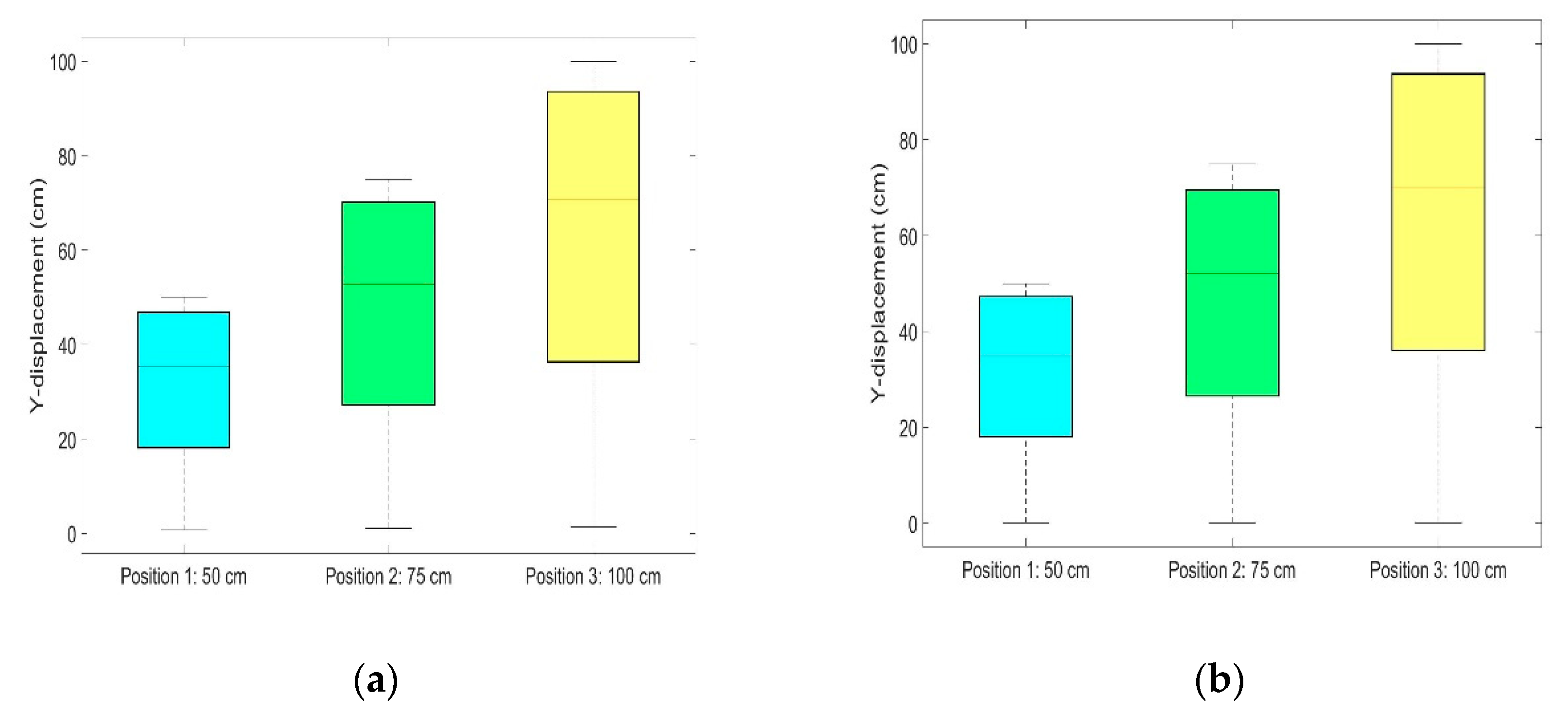
6.1. T-test
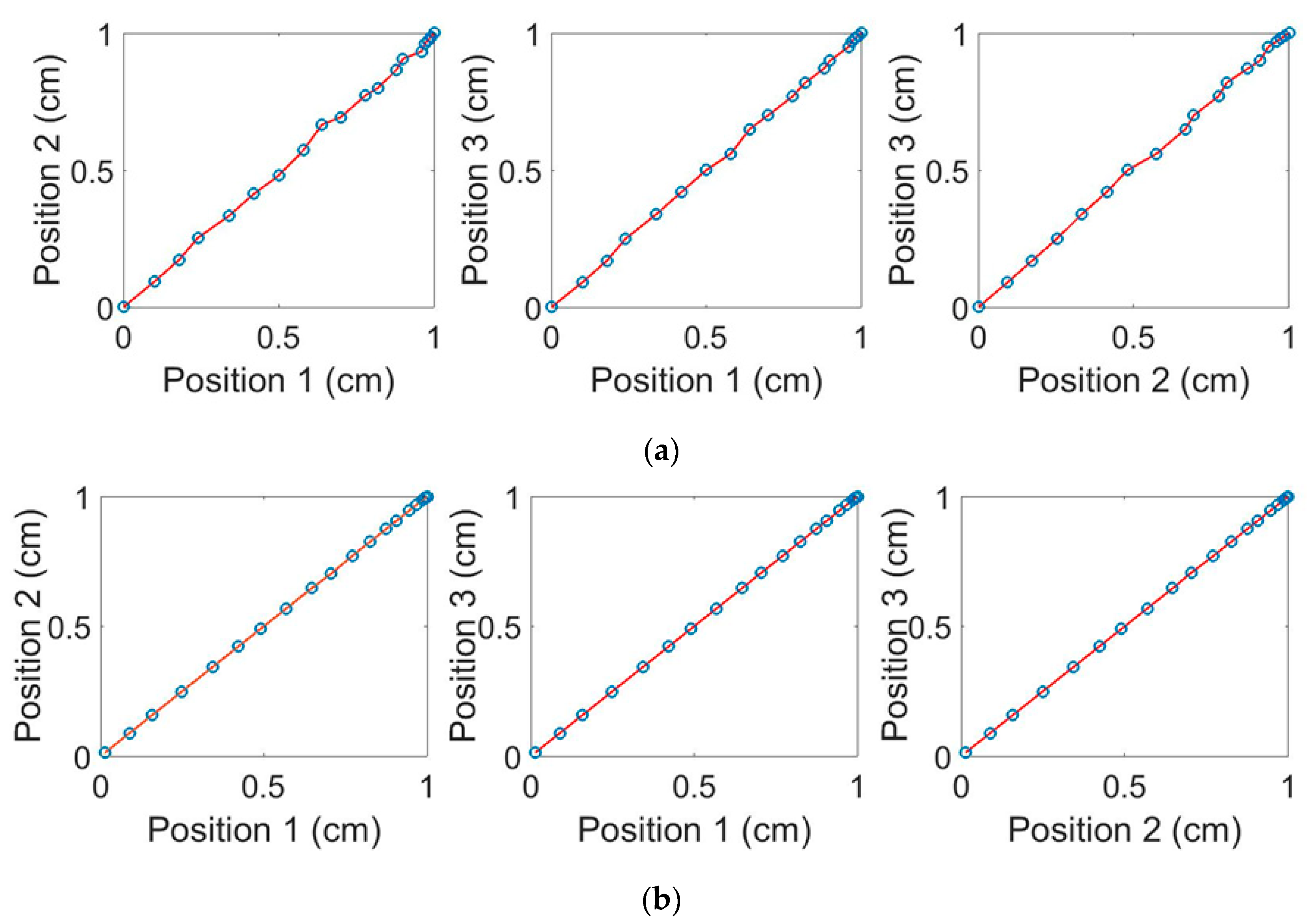
6.2. Correlation and Linear Regression Analysis
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Winter, D.; Patla, A.; Prince, F.; Ishac, M.; Gielo-Perczak, K. Stiffness control of balance in quiet standing. J. Neurophysiol. 1998, 80, 1211–1221. [Google Scholar] [CrossRef] [PubMed]
- Lafond, D.; Duarte, M.; Prince, F. Comparison of three methods to estimate the center of mass during balance assessment. J. Biomech. 2004, 37, 1421–1426. [Google Scholar] [CrossRef]
- Rosker, J.; Markovic, G.; Sarabon, N. Effects of vertical center of mass redistribution on body sway parameters during quiet standing. Gait Posture 2011, 33, 452–456. [Google Scholar] [CrossRef] [PubMed]
- Shumway-Cook, A.; Horak, F. Assessing the influence of sensory interaction on balance. Phys. Ther. 1986, 66, 1548–1550. [Google Scholar] [CrossRef] [PubMed]
- Corriveau, H.; Hébert, R.; Prince, F.; Raîche, M. Postural control in the elderly: An analysis of test-retest and interrater reliability of the COP-COM variable. Arch. Phys. Med. Rehabil. 2001, 82, 80–85. [Google Scholar] [CrossRef] [PubMed]
- Hasan, S.; Robin, D.; Szurkus, D.; Ashmead, D.; Peterson, S.; Shiavi, R. Simultaneous measurement of body center of pressure and center of gravity during upright stance. Part I: Methods. Gait Posture 1996, 4, 1–10. [Google Scholar] [CrossRef]
- Hasan, S.; Robin, D.; Szurkus, D.; Ashmead, D.; Peterson, S.; Shiavi, R. Simultaneous measurement of body center of pressure and center of gravity during upright stance. Part II: Amplitude and frequency data. Gait Posture 1996, 4, 11–20. [Google Scholar] [CrossRef]
- Błaszczyk, J.W.; Beck, M.; Sadowska, D. Assessment of postural stability in young healthy subjects based on directional features of posturographic data: vision and gender effects. Acta Neurobiol. Exp. (Warsaw) 2014, 74, 433–442. [Google Scholar]
- Błaszczyk, J.W. The use of sway vector for the assessment of postural instability. Gait Posture 2016, 44, 1–6. [Google Scholar] [CrossRef]
- Kavanagh, J.; Menz, H. Accelerometry: A technique for quantifying movement patterns during walking. Gait Posture 2008, 28, 1–15. [Google Scholar] [CrossRef]
- Yang, C.; Hsu, Y. A Review of Accelerometry-Based wearable motion detectors for physical activity monitoring. Sensors 2010, 10, 7772–7788. [Google Scholar] [CrossRef] [PubMed]
- Mathie, M.; Coster, A.; Lovell, N.; Celler, B. Accelerometry: providing an integrated, practical method for long-term, ambulatory monitoring of human movement. Physiol. Meas. 2004, 25, R1–R20. [Google Scholar] [CrossRef] [PubMed]
- Oshima, Y.; Kawaguchi, K.; Tanaka, S.; Ohkawara, K.; Hikihara, Y.; Ishikawa-Takata, K.; Tabata, I. Classifying household and locomotive activities using a triaxial accelerometer. Gait Posture 2010, 31, 370–374. [Google Scholar] [CrossRef] [PubMed]
- Khan, A.; Hammerla, N.; Mellor, S.; Plötz, T. Optimising sampling rates for accelerometer-based human activity recognition. Pattern Recognit. Lett. 2016, 73, 33–40. [Google Scholar] [CrossRef]
- Chien, J.C.; Hirakawa, K.; Shieh, J.; Guo, H.W.; Hsieh, Y. A simple method for walking posture analysis using accelerometers. In Proceedings of the 2016 International Conference on Communication Problem-Solving (ICCP), Taipei, Taiwan, 7–9 September 2016; pp. 1–3. [Google Scholar]
- Cohen, H.; Blatchly, C.A.; Gombash, L.L. A study of clinical test of sensory interaction and balance. Phys. Ther. 1993, 73, 346–351. [Google Scholar] [CrossRef]
- Martínez-Ramírez, A.; Lecumberri, P.; Gómez, M.; Rodriguez-Mañas, L.; García, F.; Izquierdo, M. Frailty assessment based on wavelet analysis during quiet standing balance test. J. Biomech. 2011, 44, 2213–2220. [Google Scholar] [CrossRef]
- Mancini, M.; Salarian, A.; Carlson-Kuhta, P.; Zampieri, C.; King, L.; Chiari, L.; Horak, F. ISway: a sensitive, valid and reliable measure of postural control. J. Neuroeng. Rehabil. 2012, 9, 1–8. [Google Scholar] [CrossRef]
- Spain, R.; St George, R.; Salarian, A.; Mancini, M.; Wagner, J.; Horak, F.; Bourdette, D. Body-worn motion sensors detect balance and gait deficits in people with multiple sclerosis who have normal walking speed. Gait Posture 2012, 35, 573–578. [Google Scholar] [CrossRef]
- Gago, M.; Fernandes, V.; Ferreira, J.; Silva, H.; Rocha, L.; Bicho, E.; Sousa, N. Postural stability analysis with inertial measurement units in Alzheimer's disease. Dement. Geriatr. Cogn. Disord. Extra 2014, 4, 22–30. [Google Scholar] [CrossRef]
- Goldring, D.; Londe, S.; Sivakoff, M.; Hernandez, A.; Britton, C.; Choi, S. Blood pressure in a high school population. J. Pediatrics 1977, 91, 884–889. [Google Scholar] [CrossRef]
- Alberts, J.; Hirsch, J.; Koop, M.; Schindler, D.; Kana, D.; Linder, S.; Campbell, S.; Thota, A. Using accelerometer and gyroscopic measures to quantify postural stability. J. Athl. Train. 2015, 50, 578–588. [Google Scholar] [CrossRef] [PubMed]
- Hiiragi, Y. Evaluation of postural sway using a triaxial accelerometer. Rigakuryoho Kagaku 2004, 19, 305–309. [Google Scholar] [CrossRef][Green Version]
- Marvel, C.A. quantitative measure of postural sway deficits in schizophrenia. Schizophr. Res. 2004, 68, 363–372. [Google Scholar] [CrossRef] [PubMed]
- Mayagoitia, R.; Lötters, J.; Veltink, P.; Hermens, H. Standing balance evaluation using a triaxial accelerometer. Gait Posture 2002, 16, 55–59. [Google Scholar] [CrossRef]
- Najafi, B.; Lee-Eng, J.; Wrobel, J.S.; Goebel, R. Estimation of center of mass trajectory using wearable sensors during golf swing. J. Sports Sci. Med. 2015, 14, 354–363. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement Number | Angle (Degrees) | Position 1 (Displacements at COM = 50 cm) | Position 2 (Displacement at COM = 75 cm) | Position 3 (Displacement at COM = 100 cm) |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 |
| 2 | 5 | 5 | 7 | 9 |
| 3 | 10 | 9 | 13 | 17 |
| 4 | 15 | 12 | 19 | 25 |
| 5 | 20 | 17 | 25 | 34 |
| 6 | 25 | 21 | 31 | 42 |
| 7 | 30 | 25 | 36 | 50 |
| 8 | 35 | 29 | 43 | 56 |
| 9 | 40 | 32 | 50 | 65 |
| 10 | 45 | 35 | 52 | 70 |
| 11 | 50 | 39 | 58 | 77 |
| 12 | 55 | 41 | 60 | 82 |
| 13 | 60 | 44 | 65 | 87 |
| 14 | 65 | 45 | 68 | 90 |
| 15 | 70 | 48 | 70 | 95 |
| 16 | 75 | 48 | 72 | 97 |
| 17 | 80 | 49 | 73 | 98 |
| 18 | 85 | 49 | 74 | 99 |
| 19 | 90 | 50 | 75 | 100 |
| Mean = 31.5 cm Standard deviation = 16.6 cm | Mean = 46.9 cm Standard deviation = 24.8 cm | Mean = 62.8 cm Standard deviation = 33.3 cm |
| Measurement Number | Angle (Degrees) | Position 1 (Displacements at COM = 50 cm) | Position 2 (Displacement at COM = 75 cm) | Position 3 (Displacement at COM = 100 cm) |
|---|---|---|---|---|
| 1 | 0.80 | 0.69 | 1.04 | 1.39 |
| 2 | 5.09 | 4.44 | 6.66 | 8.87 |
| 3 | 9.12 | 7.93 | 11.89 | 15.85 |
| 4 | 14.42 | 12.45 | 18.68 | 24.90 |
| 5 | 20.05 | 17.14 | 25.72 | 34.29 |
| 6 | 25.01 | 21.14 | 31.72 | 42.28 |
| 7 | 29.35 | 24.51 | 36.76 | 49.02 |
| 8 | 34.66 | 28.44 | 42.65 | 56.87 |
| 9 | 40.27 | 32.32 | 48.47 | 64.63 |
| 10 | 44.96 | 35.33 | 52.78 | 70.66 |
| 11 | 50.39 | 38.52 | 57.78 | 77.05 |
| 12 | 55.65 | 41.28 | 61.92 | 82.57 |
| 13 | 61.02 | 43.74 | 65.61 | 87.48 |
| 14 | 65.06 | 45.34 | 68.01 | 90.68 |
| 15 | 71.02 | 47.28 | 70.92 | 94.56 |
| 16 | 75.33 | 48.37 | 72.55 | 96.74 |
| 17 | 80.48 | 49.31 | 73.97 | 98.62 |
| 18 | 84.17 | 49.74 | 74.61 | 99.48 |
| 19 | 89.28 | 50.00 | 74.99 | 99.99 |
| Statistics | Mean = 31.5 cm Standard deviation = 16. 7 cm | Mean = 47.2 cm Standard deviation = 25.0 cm | Mean = 62.9 cm Standard deviation = 33.3 cm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ojie, O.O.D.; Saatchi, R.; Saatchi, M. Demonstration of the Effect of Centre of Mass Height on Postural Sway Using Accelerometry for Balance Analysis. Technologies 2020, 8, 20. https://doi.org/10.3390/technologies8020020
Ojie OOD, Saatchi R, Saatchi M. Demonstration of the Effect of Centre of Mass Height on Postural Sway Using Accelerometry for Balance Analysis. Technologies. 2020; 8(2):20. https://doi.org/10.3390/technologies8020020
Chicago/Turabian StyleOjie, Oseikhuemen Osemekhian Davis, Reza Saatchi, and Mahdieh Saatchi. 2020. "Demonstration of the Effect of Centre of Mass Height on Postural Sway Using Accelerometry for Balance Analysis" Technologies 8, no. 2: 20. https://doi.org/10.3390/technologies8020020
APA StyleOjie, O. O. D., Saatchi, R., & Saatchi, M. (2020). Demonstration of the Effect of Centre of Mass Height on Postural Sway Using Accelerometry for Balance Analysis. Technologies, 8(2), 20. https://doi.org/10.3390/technologies8020020