
Innovative Investigation of the Influence of a Variable Load on Unbalance Fault Diagnosis Technologies

 ,
, 
Abstract
1. Introduction
- -
- Nonstationary coupled flexural–torsional model governing dynamics of an unbalanced disk–shaft system.
- -
- Theoretical and experimental investigations of the influence of variable torsional load on 1X rotational harmonic magnitudes, which serves as the unbalance fault indicator for conventional technology, for the first time worldwide.
- -
- Theoretical and experimental investigations of the influence of the variable torsional load on the speed-invariant unbalance diagnostic feature, a novel technology, for the first time worldwide.
- -
- Comparison of the effect of variable torsional load on conventional unbalance technology and the novel speed-invariant technology.
- -
- To obtain and to solve the coupled equations of motion governing flexural–torsional dynamics of unbalanced disc–shaft systems subjected to variable load and rotational speed conditions.
- -
- To obtain the nonstationary acceleration signal and its 1X magnitudes by applying the higher-order STCFT.
- -
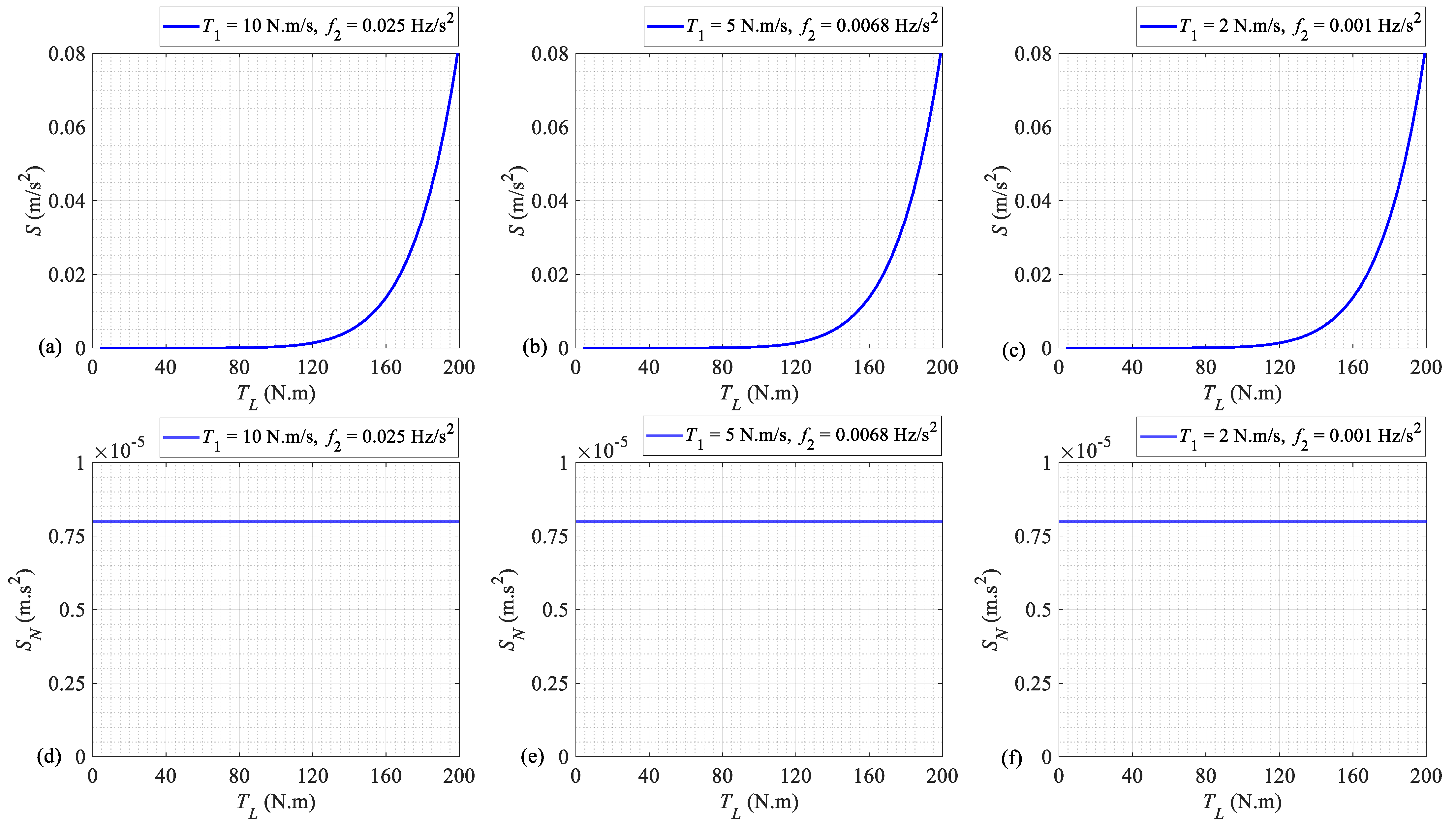
- To numerically investigate the influence of the variable torsional load on the intensity of the fundamental rotational harmonic of the acceleration signal.
- -
- To numerically investigate the influence of the variable torsional load on the speed-invariant unbalance fault indicator.
- -
- To process the nonstationary vibration data acquired from the main bearing of a 2.3 MW wind turbine with a permissible level of unbalance.
- -
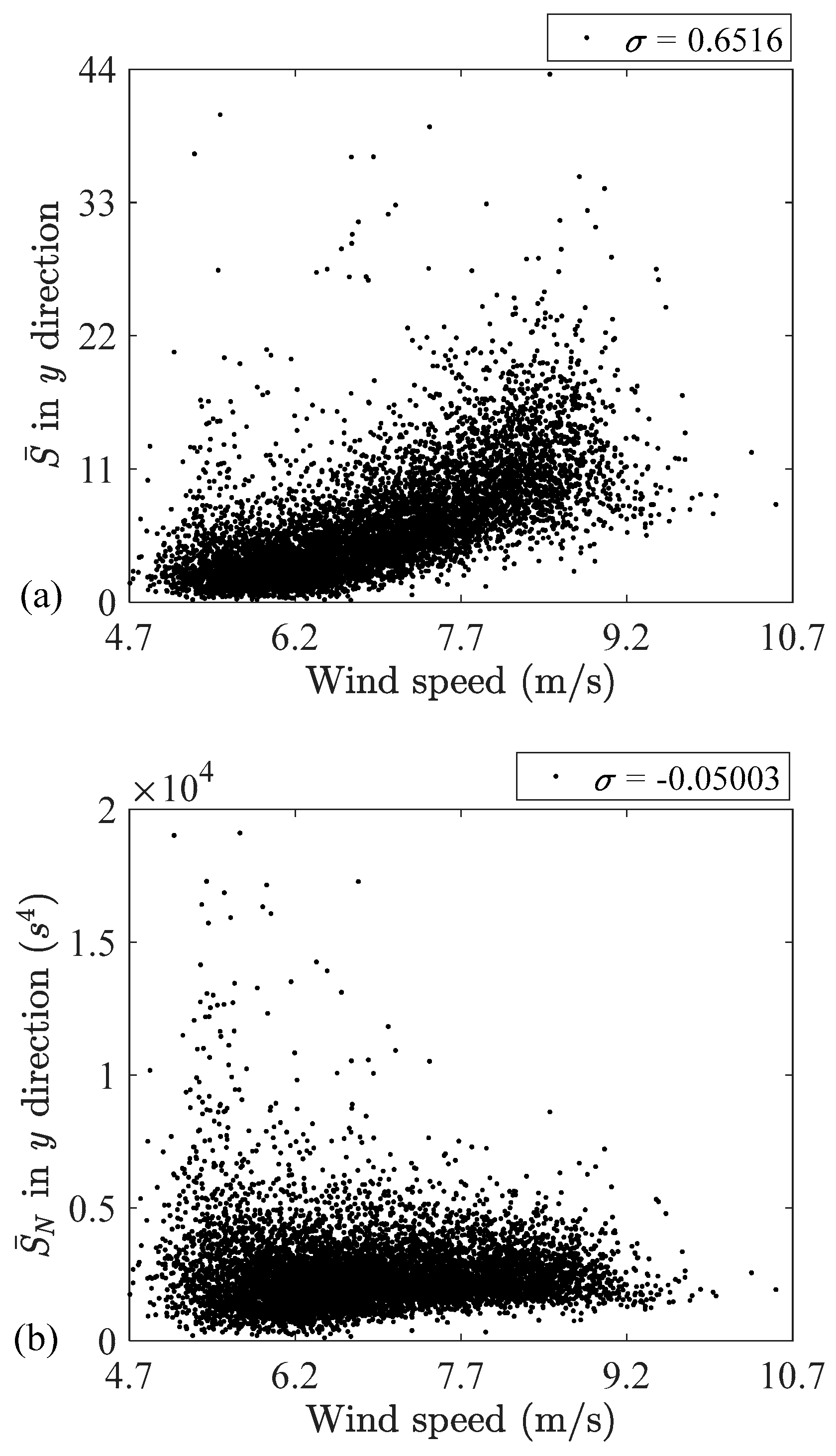
- To evaluate the normalized cross-covariance [40] between the unbalance diagnostic features and the wind speed—acting as a representative for the level of torsional load—to quantify the load dependency of the fault indicators.
- -
- To experimentally investigate the influence of the variable torsional load on the conventional unbalance fault indicator.
- -
- To experimentally investigate the influence of the variable torsional load on the speed-invariant unbalance diagnostic feature.
- -
- To compare the effects of variable torsional load on the 1× magnitudes, the conventional unbalance fault indicator, and the speed-invariant unbalance feature.
2. Theoretical Background
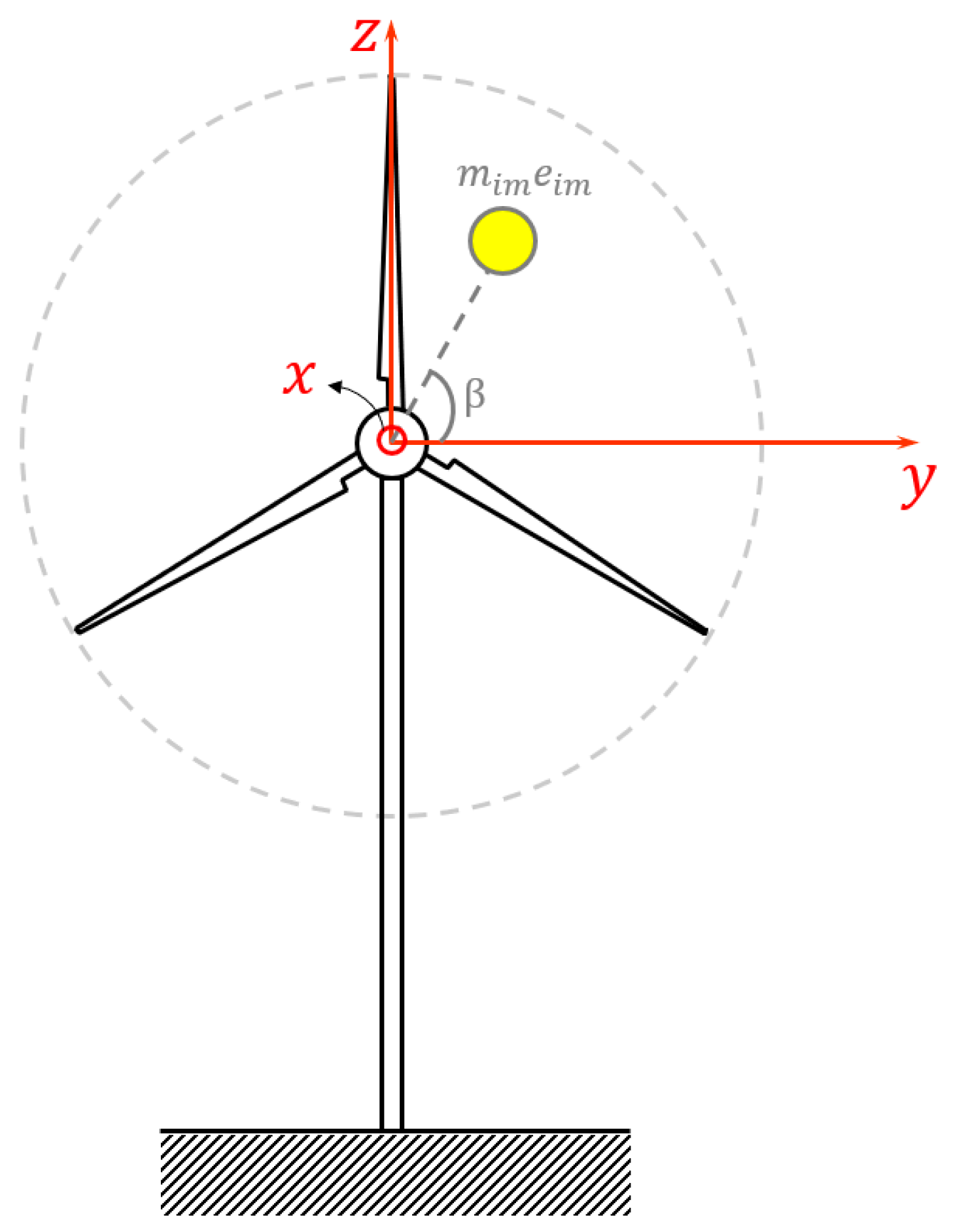
2.1. Nonstationary Equations of Motion
2.2. Solution Procedure
3. Experimental Analysis
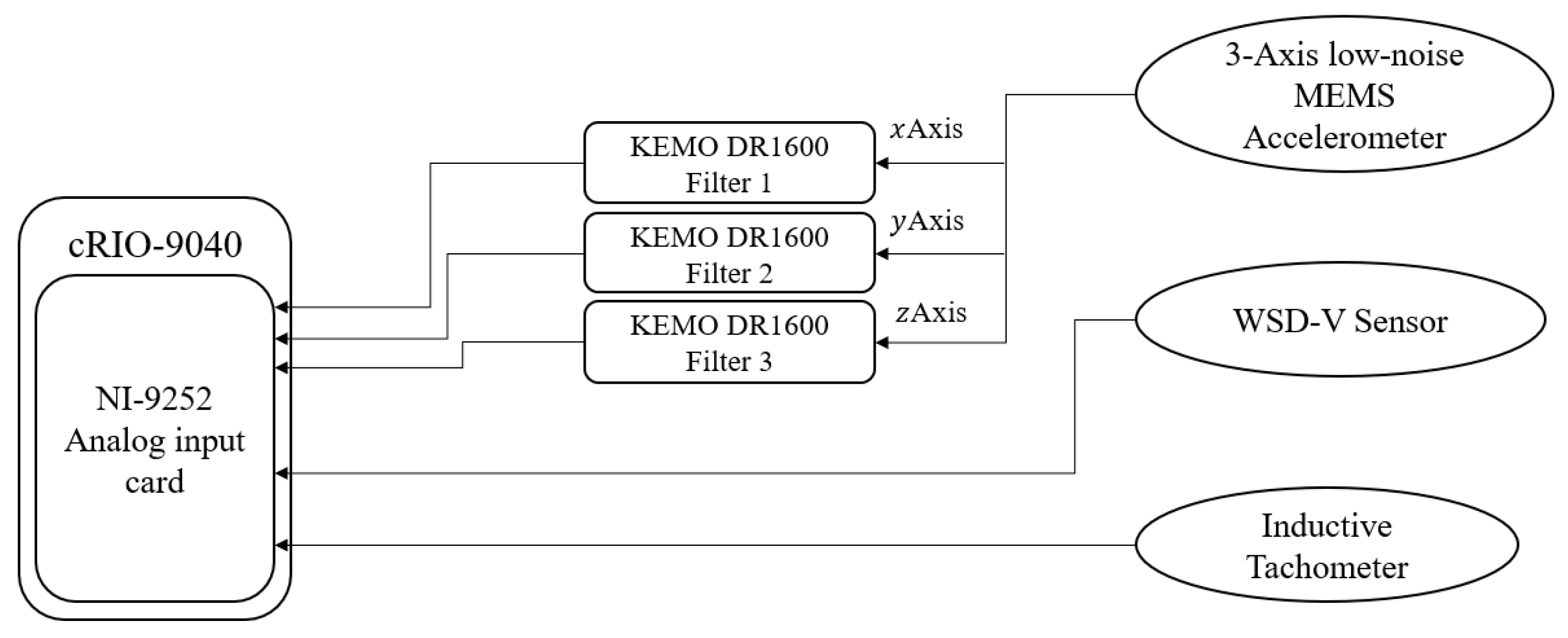
3.1. Experimental Setup
3.2. Processing Experimental Signals
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DAQ | Data acquisition |
| FC | Fisher’s criterion |
| Probability density function | |
| SP | Separation probability |
| STCFT | Short-time chirp Fourier transform |
References
- ISO 21940-11:2016; Mechanical Vibration—Rotor Balancing—Part 11: Procedures and Tolerances for Rotors with Rigid Behaviour. International Organization for Standardization: Geneva, Switzerland, 2016.
- Kusnick, J.; Adams, D.E.; Griffith, D.T. Wind turbine rotor imbalance detection using nacelle and blade measurements. Wind Energy 2015, 18, 267–276. [Google Scholar] [CrossRef]
- Kramer, E. Dynamics of Rotors and Foundations; Springer: Berlin, Germany, 1993. [Google Scholar]
- Xu, M.; Marangoni, R.D. Vibration analysis of a motor-flexible coupling-rotor system subject to misalignment and unbalance, Part I: Theoretical model and analysis. J. Sound Vib. 1994, 176, 663–679. [Google Scholar] [CrossRef]
- Jain, J.R.; Kundra, T.K. Model based online diagnosis of unbalance and transverse fatigue crack in rotor systems. Mech. Res. Commun. 2004, 31, 557–568. [Google Scholar] [CrossRef]
- Jalan, A.K.; Mohanty, A.R. Model based fault diagnosis of a rotor–bearing system for misalignment and unbalance under steady-state condition. J. Sound Vib. 2009, 327, 604–622. [Google Scholar] [CrossRef]
- Sudhakar, G.N.D.S.; Sekhar, A.S. Identification of unbalance in a rotor bearing system. J. Sound Vib. 2011, 330, 2299–2313. [Google Scholar] [CrossRef]
- Lin, C.L.; Liang, J.W.; Huang, Y.M.; Huang, S.C. A novel model-based unbalance monitoring and prognostics for rotor-bearing systems. Adv. Mech. Eng. 2023, 15, 16878132221148019. [Google Scholar] [CrossRef]
- Bera, B.; Huang, S.C.; Najibullah, M.; Lin, C.L. An adaptive model-based approach to the diagnosis and prognosis of rotor-bearing unbalance. Machines 2023, 11, 976. [Google Scholar] [CrossRef]
- Desouki, M.; Sassi, S.; Renno, J.; Gowid, S.A. Dynamic response of a rotating assembly under the coupled effects of misalignment and imbalance. Shock Vib. 2020, 2020, 8819676. [Google Scholar] [CrossRef]
- Hibbeler, R.C. Engineering Mechanics: Dynamics; Pearson Educación: London, UK, 2004. [Google Scholar]
- Rafaq, M.S.; Lee, H.; Park, Y.; Lee, S.B.; Fernandez, D.; Diaz-Reigosa, D.; Briz, F. A simple method for identifying mass unbalance using vibration measurement in permanent magnet synchronous motors. IEEE Trans. Ind. Electron. 2022, 69, 6441–6444. [Google Scholar] [CrossRef]
- Puerto-Santana, C.; Ocampo-Martinez, C.; Diaz-Rozo, J. Mechanical rotor unbalance monitoring based on system identification and signal processing approaches. J. Sound Vib. 2022, 541, 117313. [Google Scholar] [CrossRef]
- Ewert, P.; Wicher, B.; Pajchrowski, T. Application of the STFT for detection of the rotor unbalance of a servo-drive system with an elastic interconnection. Electronics 2024, 13, 441. [Google Scholar] [CrossRef]
- Haselbach, P.U.; Bitsche, R.D.; Branner, K. The effect of delaminations on local buckling in wind turbine blades. Renew. Energy 2016, 85, 295–305. [Google Scholar] [CrossRef]
- Jiménez, A.A.; García Márquez, F.P.; Moraleda, V.B.; Gómez Muñoz, C.Q. Linear and nonlinear features and machine learning for wind turbine blade ice detection and diagnosis. Renew. Energy 2019, 132, 1034–1048. [Google Scholar] [CrossRef]
- Zeng, J.; Song, B. Research on experiment and numerical simulation of ultrasonic de-icing for wind turbine blades. Renew. Energy 2017, 113, 706–712. [Google Scholar] [CrossRef]
- Mishnaevsky, L. Repair of wind turbine blades: Review of methods and related computational mechanics problems. Renew. Energy 2019, 140, 828–839. [Google Scholar] [CrossRef]
- Sareen, A.; Sapre, C.A.; Selig, M.S. Effects of leading edge erosion on wind turbine blade performance. Wind Energy 2014, 17, 1531–1542. [Google Scholar] [CrossRef]
- Niebsch, J.; Ramlau, R.; Nguyen, T.T. Mass and aerodynamic imbalance estimates of wind turbines. Energies 2010, 3, 696–710. [Google Scholar] [CrossRef]
- Wang, J.; Liang, Y.; Zheng, Y.; Gao, R.X.; Zhang, F. An integrated fault diagnosis and prognosis approach for predictive maintenance of wind turbine bearing with limited samples. Renew. Energy 2020, 145, 642–650. [Google Scholar] [CrossRef]
- Ramlau, R.; Niebsch, J. Imbalance estimation without test masses for wind turbines. J. Sol. Energy Eng. 2009, 131, 011010. [Google Scholar] [CrossRef]
- Li, P.; Hu, W.; Hu, R.; Chen, Z. Imbalance fault detection based on the integrated analysis strategy for variable-speed wind turbines. Int. J. Electr. Power Energy Syst. 2020, 116, 105570. [Google Scholar] [CrossRef]
- Fyfe, K.R.; Munck, E.D.S. Analysis of computed order tracking. Mech. Syst. Signal Process. 1997, 11, 187–205. [Google Scholar] [CrossRef]
- Bossley, K.M.; McKendrick, R.J.; Harris, C.J.; Mercer, C. Hybrid computed order tracking. Mech. Syst. Signal Process. 1999, 13, 627–641. [Google Scholar] [CrossRef]
- Bonnardot, F.; El Badaoui, M.; Randall, R.B.; Danière, J.; Guillet, F. Use of the acceleration signal of a gearbox in order to perform angular resampling (with limited speed fluctuation). Mech. Syst. Signal Process. 2005, 19, 766–785. [Google Scholar] [CrossRef]
- Zhao, M.; Lin, J.; Wang, X.; Lei, Y.; Cao, J. A tacho-less order tracking technique for large speed variations. Mech. Syst. Signal Process. 2013, 40, 76–90. [Google Scholar] [CrossRef]
- Coats, M.D.; Randall, R.B. Single and multi-stage phase demodulation based order-tracking. Mech. Syst. Signal Process. 2014, 44, 86–117. [Google Scholar] [CrossRef]
- Lu, S.; Yan, R.; Liu, Y.; Wang, Q. Tacholess speed estimation in order tracking: A review with application to rotating machine fault diagnosis. IEEE Trans. Instrum. Meas. 2019, 68, 2315–2332. [Google Scholar] [CrossRef]
- Wu, J.; Zi, Y.; Chen, J.; Zhou, Z. Fault diagnosis in speed variation conditions via improved tacholess order tracking technique. Measurement 2019, 137, 604–616. [Google Scholar] [CrossRef]
- Wu, B.; Hou, L.; Wang, S.; Lian, X. A tacholess order tracking method based on the STFTSC algorithm for rotor unbalance fault diagnosis under variable-speed conditions. J. Comput. Inf. Sci. Eng. 2023, 24, 021009. [Google Scholar] [CrossRef]
- Xu, J.; Ding, X.; Gong, Y.; Wu, N.; Yan, H. Rotor imbalance detection and quantification in wind turbines via vibration analysis. Wind Eng. 2021, 46, 3–11. [Google Scholar] [CrossRef]
- Askari, A.R.; Gelman, L.; King, R.; Hickey, D.; Ball, A.D. A novel diagnostic feature for a wind turbine imbalance under variable speed conditions. Sensors 2024, 24, 7073. [Google Scholar] [CrossRef] [PubMed]
- Salah, M.; Bacha, K.; Chaari, A. Load torque effect on diagnosis techniques consistency for detection of mechanical unbalance. In Proceedings of the International Conference on Control, Decision and Information Technologies (CoDIT), Hammamet, Tunisia, 6–8 May 2013; pp. 770–775. [Google Scholar] [CrossRef]
- Suri, G. Loading effect on induction motor eccentricity diagnostics using vibration and motor current. In Proceedings of the Experimental Techniques, Rotating Machinery, and Acoustics, Volume 8: Proceedings of the Society for Experimental Mechanics Series; Springer: Cham, Switzerland, 2015; pp. 273–280. [Google Scholar] [CrossRef]
- Askari, A.R.; Gelman, L.; Ball, A.D. Novel investigation of influence of torsional load on unbalance fault indicators for induction motors. Sensors 2025, 25, 2084. [Google Scholar] [CrossRef] [PubMed]
- Reddy, J.N. Energy Principles and Variational Methods in Applied Mechanics, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Rao, S.S. Vibration of Continuous Systems, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Gelman, L.; Ottley, M. New processing techniques for transient signals with non-linear variation of the instantaneous frequency in time. Mech. Syst. Signal Process. 2006, 20, 1254–1262. [Google Scholar] [CrossRef]
- Kendall, M.G. The Advanced Theory of Statistics, 4th ed.; Macmillan: London, UK, 1979. [Google Scholar]
- Gelman, L. Piecewise model and estimates of damping and natural frequency for a spur gear. Mech. Syst. Signal Process. 2007, 21, 1192–1196. [Google Scholar] [CrossRef]
- Faires, J.D.; Burden, R.L. Numerical Methods, 3rd ed.; Brooks/Cole: Pacific Grove, CA, USA, 2002. [Google Scholar]
- Mohsenzadeh, A.; Tahani, M.; Askari, A.R. A novel method for investigating the Casimir effect on pull-in instability of electrostatically actuated fully clamped rectangular nano/microplates. J. Nanosci. 2015, 2015, 328742. [Google Scholar] [CrossRef]
- Shaban Ali Nezhad, H.; Hosseini, S.A.A.; Zamanian, M. Flexural–flexural–extensional–torsional vibration analysis of composite spinning shafts with geometrical nonlinearity. Nonlinear Dyn. 2017, 89, 651–690. [Google Scholar] [CrossRef]
- Jahangiri, M.; Asghari, M.; Bagheri, E. Torsional vibration induced by gyroscopic effect in the modified couple stress based micro-rotors. Eur. J. Mech.—A/Solids 2020, 81, 103907. [Google Scholar] [CrossRef]
- Gelman, L.; Petrunin, I. The new multidimensional time/multi-frequency transform for higher order spectral analysis. Multidimens. Syst. Signal Process. 2007, 18, 317–325. [Google Scholar] [CrossRef]
- Gelman, L.; Kırlangıç, A.S. Novel vibration structural health monitoring technology for deep foundation piles by non-stationary higher order frequency response function. Struct. Control Health Monit. 2020, 27, e2526. [Google Scholar] [CrossRef]
- Gelman, L.; Soliński, K.; Ball, A. Novel higher-order spectral cross-correlation technologies for vibration sensor-based diagnosis of gearboxes. Sensors 2020, 20, 5131. [Google Scholar] [CrossRef] [PubMed]
- Gelman, L.; Petrunin, I.; Parrish, C.; Walters, M. Novel health monitoring technology for in-service diagnostics of intake separation in aircraft engines. Struct. Control Health Monit. 2020, 27, e2479. [Google Scholar] [CrossRef]
- Zhao, D.; Gelman, L.; Chu, F.; Ball, A. Novel method for vibration sensor-based instantaneous defect frequency estimation for rolling bearings under non-stationary conditions. Sensors 2020, 20, 5201. [Google Scholar] [CrossRef] [PubMed]
- Meirovitch, L. Fundamentals of Vibrations; Waveland Press: Long Grove, IL, USA, 2010. [Google Scholar]
- Manwell, J.F.; McGowan, J.G.; Rogers, A.L. Wind Energy Explained: Theory, Design and Application, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Bai, C.-J.; Wang, W.-C. Review of computational and experimental approaches to analysis of aerodynamic performance in horizontal-axis wind turbines (HAWTs). Renew. Sustain. Energy Rev. 2016, 63, 506–519. [Google Scholar] [CrossRef]
- Kishinami, K.; Taniguchi, H.; Suzuki, J.; Ibano, H.; Kazunou, T.; Turuhami, M. Theoretical and experimental study on the aerodynamic characteristics of a horizontal axis wind turbine. Energy 2005, 30, 2089–2100. [Google Scholar] [CrossRef]
- Gelman, L.; Petrunin, I.; Komoda, J. The new chirp-Wigner higher order spectra for transient signals with any known nonlinear frequency variation. Mech. Syst. Signal Process. 2010, 24, 567–571. [Google Scholar] [CrossRef]
- Ciszewski, T.; Gelman, L.; Ball, A. Novel fault identification for electromechanical systems via spectral technique and electrical data processing. Electronics 2020, 9, 1560. [Google Scholar] [CrossRef]
- Farhat, M.H.; Gelman, L.; Abdullahi, A.O.; Ball, A.; Conaghan, G.; Kluis, W. Novel fault diagnosis of a conveyor belt mis-tracking via motor current signature analysis. Sensors 2023, 23, 3652. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 0.03 | 0.15 | 7870 | 206 | 79 | 50 | 0.5 | 0.12 |
| Duration (s) | Chirp Rate () (Hz/s) | ||||||
|---|---|---|---|---|---|---|---|
| Case 1 | 0 | 10 | 0 | 0 | 0.025 | 20 | [0, 1] |
| Case 2 | 0 | 5 | 0 | 0 | 0.0068 | 40 | [0, 0.5] |
| Case 3 | 0 | 2 | 0 | 0 | 0.001 | 100 | [0, 0.2] |
| The FC | 1.32 | |
| The SP | 81.01% | 52.53% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Askari, A.R.; Gelman, L.; Hickey, D.; King, R.; Behzad, M.; Jha, P. Innovative Investigation of the Influence of a Variable Load on Unbalance Fault Diagnosis Technologies. Technologies 2025, 13, 304. https://doi.org/10.3390/technologies13070304
Askari AR, Gelman L, Hickey D, King R, Behzad M, Jha P. Innovative Investigation of the Influence of a Variable Load on Unbalance Fault Diagnosis Technologies. Technologies. 2025; 13(7):304. https://doi.org/10.3390/technologies13070304
Chicago/Turabian StyleAskari, Amir R., Len Gelman, Daryl Hickey, Russell King, Mehdi Behzad, and Panchanand Jha. 2025. "Innovative Investigation of the Influence of a Variable Load on Unbalance Fault Diagnosis Technologies" Technologies 13, no. 7: 304. https://doi.org/10.3390/technologies13070304
APA StyleAskari, A. R., Gelman, L., Hickey, D., King, R., Behzad, M., & Jha, P. (2025). Innovative Investigation of the Influence of a Variable Load on Unbalance Fault Diagnosis Technologies. Technologies, 13(7), 304. https://doi.org/10.3390/technologies13070304