

Estimating Summer Maize Biomass by Integrating UAV Multispectral Imagery with Crop Physiological Parameters

 ,
,
Abstract
1. Introduction
2. Materials and Methods
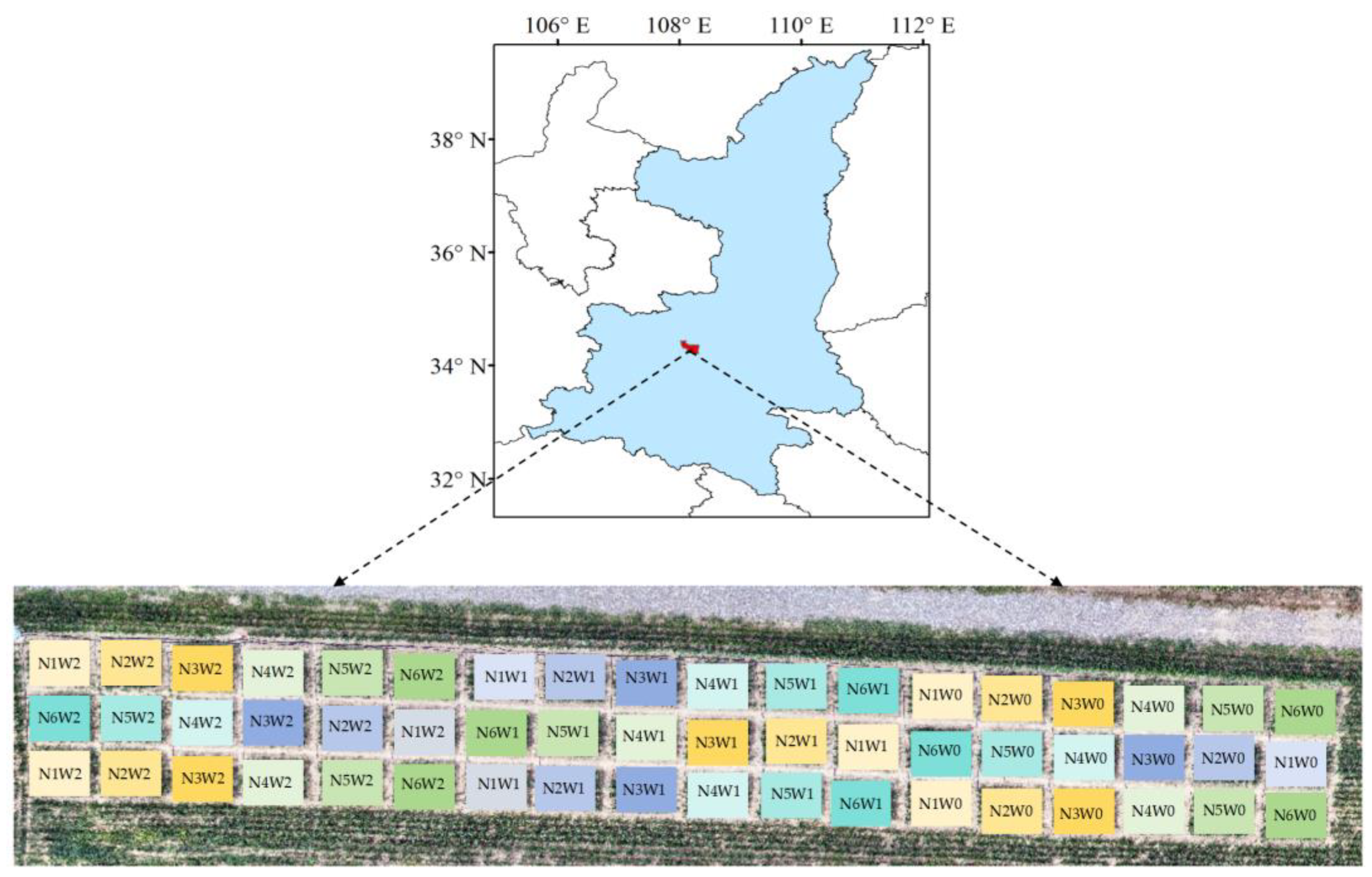
2.1. Study Area
2.2. Data Acquisition and Processing
2.3. Acquisition of Ground Data
2.4. Vegetation Index Extraction
2.5. Plant Height Extraction
2.6. Model Selection
2.7. Model Construction and Accuracy Evaluation
3. Results
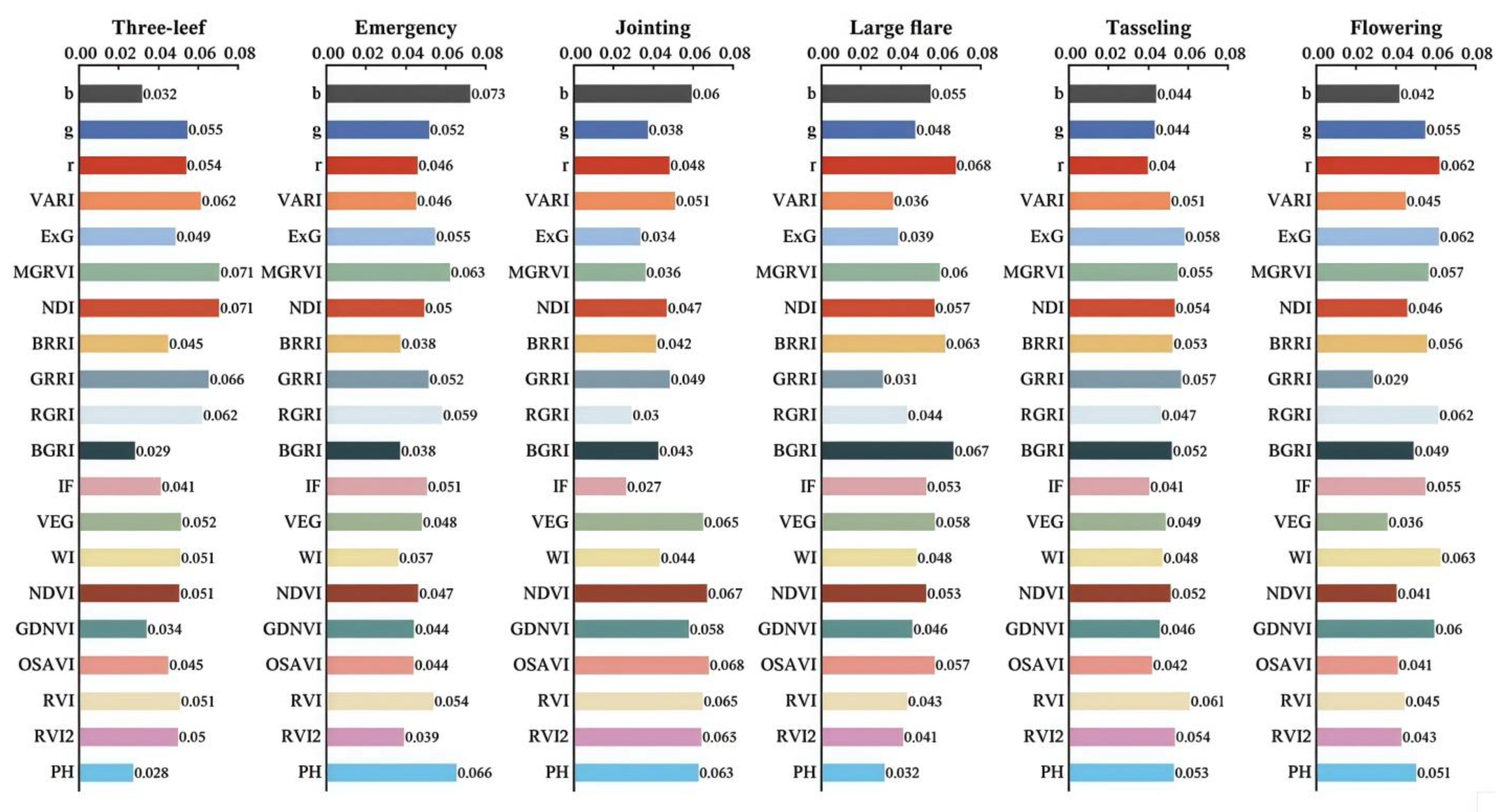
3.1. Feature Selection and Analysis
3.2. Biomass Prediction Based on Vegetation Indices
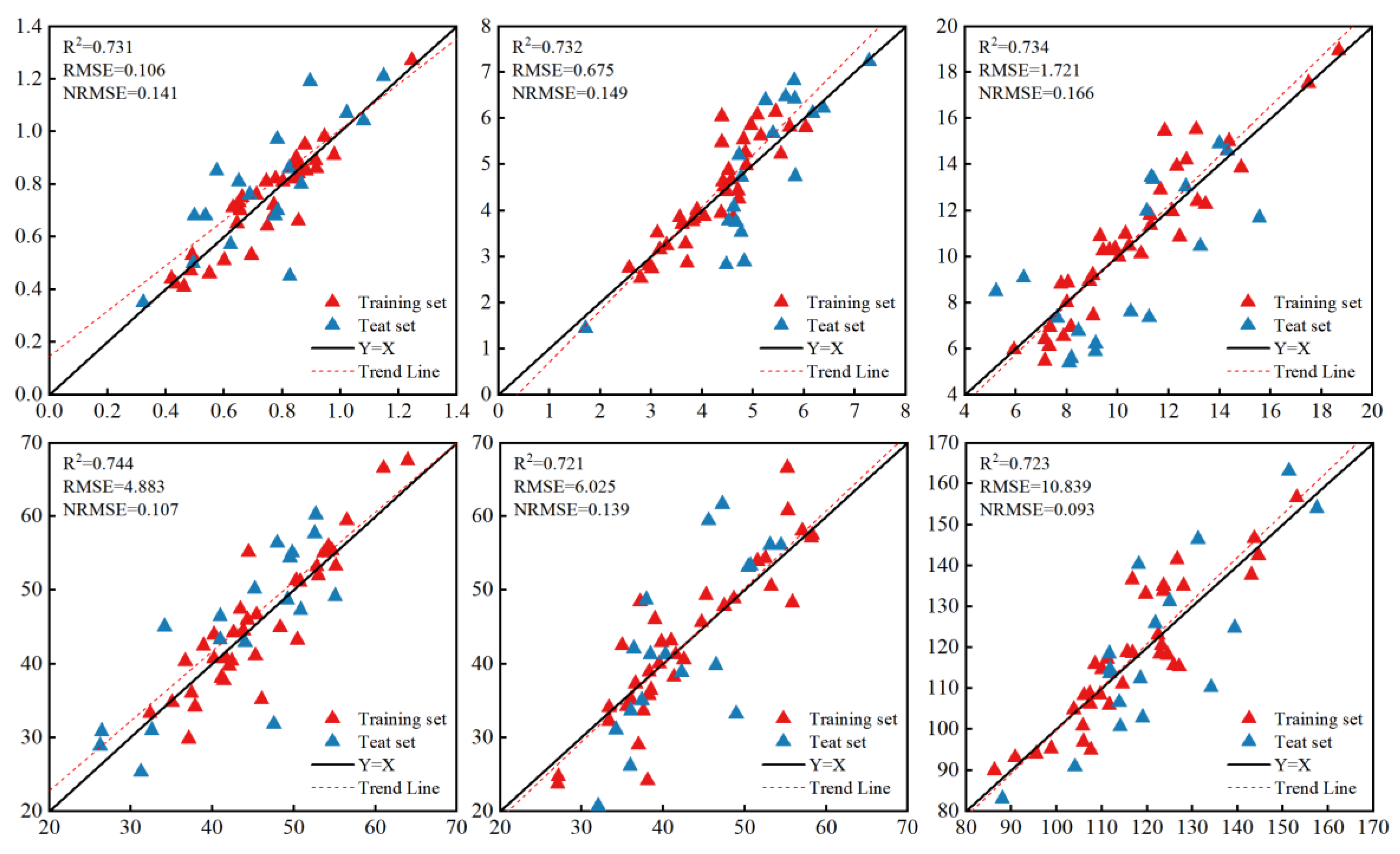
3.3. Biomass Prediction Combining Plant Height and Vegetation Indices
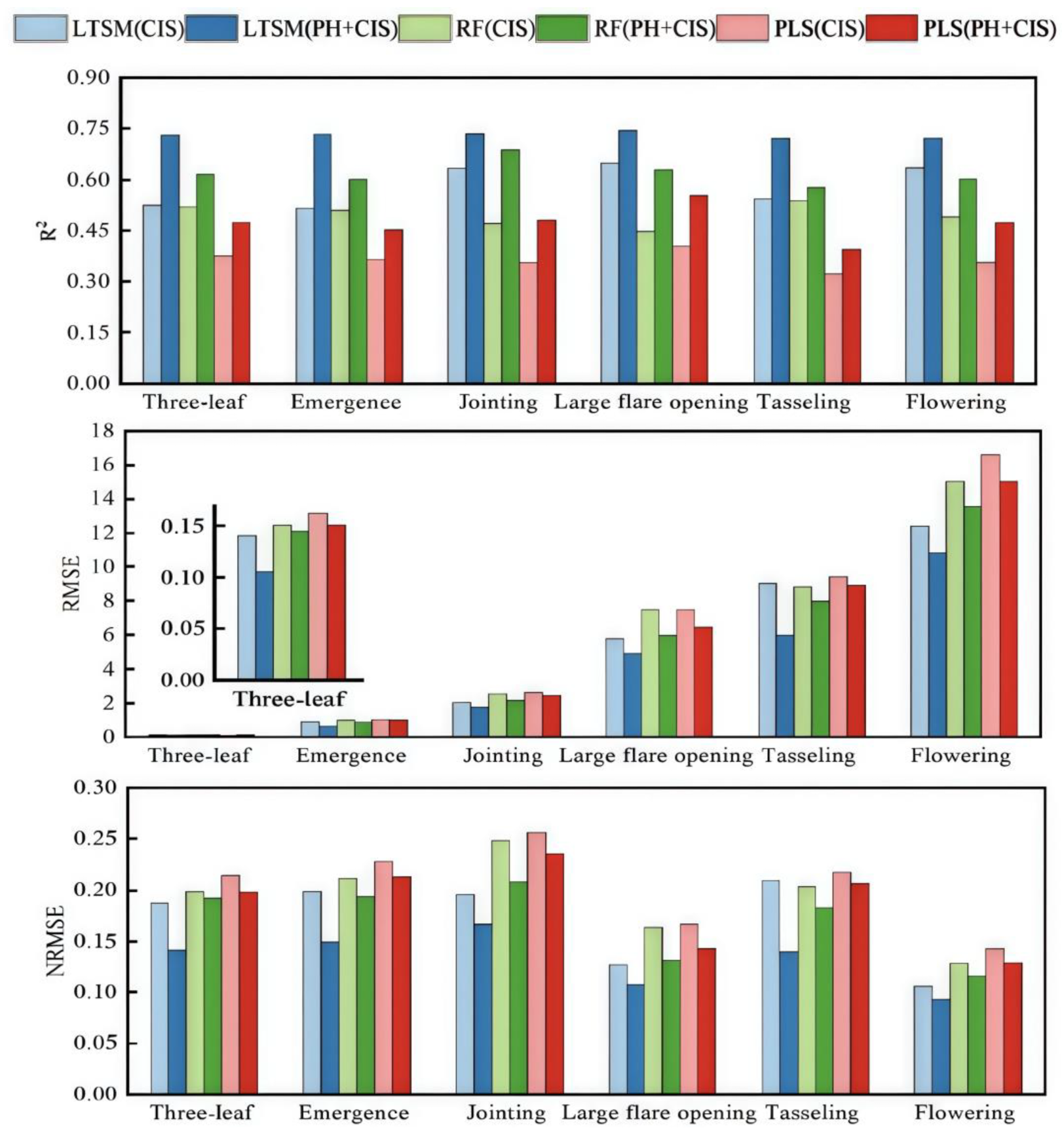
3.4. Comparison of Different Model Performances
4. Discussion
4.1. Advantages of Combining Crop Parameters
4.2. Efficiency of Deep Learning Models
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Luo, N.; Meng, Q.; Feng, P.; Qu, Z.; Yu, Y.; Liu, D.L.; Müller, C.; Wang, P. China can be self-sufficient in maize production by 2030 with optimal crop management. Nat. Commun. 2023, 14, 2637. [Google Scholar] [CrossRef] [PubMed]
- Guillevic, P.C.; Aouizerats, B.; Burger, R.; Besten, N.D.; Jackson, D.; Ridderikhoff, M.; Zajdband, A.; Houborg, R.; Franz, T.E.; Robertson, G.P.; et al. Planet’s Biomass Proxy for monitoring aboveground agricultural biomass and estimating crop yield. Field Crops Res. 2024, 316, 109511. [Google Scholar] [CrossRef]
- Hsiao, T.C.; Heng, L.; Steduto, P.; Rojas-Lara, B.; Raes, D.; Fereres, E. Aquacrop—The FAO crop model to simulate yield response to water: III. parameterization and testing for maize. Agron. J. 2009, 101, 448–459. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, S.; Li, J.; Guo, X.; Wang, S.; Lu, J. Estimating biomass of winter oilseed rape using vegetation indices and texture metrics derived from UAV multispectral images. Comput. Electron. Agric. 2019, 166, 105026. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral Imaging: A Review on UAV-Based Sensors, Data Processing and Applications for Agriculture and Forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Vivone, G. Multispectral and hyperspectral image fusion in remote sensing: A survey. Inf. Fusion. 2023, 89, 405–417. [Google Scholar] [CrossRef]
- Zhai, W.; Li, C.; Fei, S.; Liu, Y.; Ding, F.; Cheng, Q.; Chen, Z. CatBoost algorithm for estimating maize above-ground biomass using unmanned aerial vehicle-based multi-source sensor data and SPAD values. Comput. Electron. Agric. 2023, 214, 108306. [Google Scholar] [CrossRef]
- Adar, S.; Sternberg, M.; Paz-Kagan, T.; Henkin, Z.; Dovrat, G.; Zaady, E.; Argaman, E. Estimation of aboveground biomass production using an unmanned aerial vehicle (UAV) and VENμS satellite imagery in Mediterranean and semiarid rangelands. Remote Sens. Appl. Soc. Environ. 2022, 26, 100753. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, H.; Yue, J.; Jin, X.; Fan, Y.; Chen, R.; Bian, M.; Ma, Y.; Song, X.; Yang, G. Improved potato AGB estimates based on UAV RGB and hyperspectral images. Comput. Electron. Agric. 2023, 214, 108260. [Google Scholar] [CrossRef]
- Xiao, J.; Suab, S.A.; Chen, X.; Singh, C.K.; Singh, D.; Aggarwal, A.K.; Korom, A.; Widyatmanti, W.; Mollah, T.H.; Minh, H.V.T.; et al. Enhancing assessment of corn growth performance using unmanned aerial vehicles (UAVs) and deep learning. Measurement 2023, 214, 112764. [Google Scholar] [CrossRef]
- Wang, D.; Li, R.; Zhu, B.; Liu, T.; Sun, C.; Guo, W. Estimation of Wheat Plant Height and Biomass by Combining UAV Imagery and Elevation Data. Agriculture 2023, 13, 9. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating Biomass of Barley Using Crop Surface Models (CSMs) Derived from UAV-Based RGB Imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef]
- Cen, H.; Wan, L.; Zhu, J.; Li, Y.; Li, X.; Zhu, Y.; Weng, H.; Wu, W.; Yin, W.; Xu, C.; et al. Dynamic monitoring of biomass of rice under different nitrogen treatments using a lightweight UAV with dual image-frame snapshot cameras. Plant Methods 2019, 15, 32. [Google Scholar] [CrossRef]
- Mutanga, O.; Masenyama, A.; Sibanda, M. Spectral saturation in the remote sensing of high-density vegetation traits: A systematic review of progress, challenges, and prospects. ISPRS J. Photogramm. Remote Sens. 2023, 198, 297–309. [Google Scholar] [CrossRef]
- Hilty, J.; Muller, B.; Pantin, F.; Leuzinger, S. Plant growth: The What, the How, and the Why. New Phytol. 2021, 232, 25–41. [Google Scholar] [CrossRef] [PubMed]
- Kattenborn, T.; Schmidtlein, S. Radiative transfer modelling reveals why canopy reflectance follows function. Sci. Rep. 2019, 9, 6541. [Google Scholar] [CrossRef]
- Yu, M.; Liu, Z.-H.; Yang, B.; Chen, H.; Zhang, H.; Hou, D.-B. The contribution of photosynthesis traits and plant height components to plant height in wheat at the individual quantitative trait locus level. Sci. Rep. 2020, 10, 12261. [Google Scholar] [CrossRef]
- Gao, M.; Yang, F.; Wei, H.; Liu, X. Individual Maize Location and Height Estimation in Field from UAV-Borne LiDAR and RGB Images. Remote Sens. 2022, 14, 2292. [Google Scholar] [CrossRef]
- Zhang, Y.; Xia, C.; Zhang, X.; Cheng, X.; Feng, G.; Wang, Y.; Gao, Q. Estimating the maize biomass by crop height and narrowband vegetation indices derived from UAV-based hyperspectral images. Ecol. Indic. 2021, 129, 107985. [Google Scholar] [CrossRef]
- De Souza, C.H.W.; Lamparelli, R.A.C.; Rocha, J.V.; Magalhães, P.S.G. Height estimation of sugarcane using an unmanned aerial system (UAS) based on structure from motion (SfM) point clouds. Int. J. Remote Sens. 2017, 38, 2218–2230. [Google Scholar] [CrossRef]
- Laghari, A.A.; Jumani, A.K.; Laghari, R.A.; Li, H.; Karim, S.; Khan, A.A. Unmanned aerial vehicles advances in object detection and communication security review. Cogn. Robot. 2024, 4, 128–141. [Google Scholar] [CrossRef]
- Morais, T.G.; Teixeira, R.F.M.; Figueiredo, M.; Domingos, T. The use of machine learning methods to estimate aboveground biomass of grasslands: A review. Ecol. Indic. 2021, 130, 108081. [Google Scholar] [CrossRef]
- You, Y.; Tian, H.; Pan, S.; Shi, H.; Bian, Z.; Gurgel, A.; Huang, Y.; Kicklighter, D.; Liang, X.-Z.; Lu, C.; et al. Incorporating dynamic crop growth processes and management practices into a terrestrial biosphere model for simulating crop production in the United States: Toward a unified modeling framework. Agric. For. Meteorol. 2022, 325, 109144. [Google Scholar] [CrossRef]
- Liu, T.; Wang, J.; Wang, J.; Zhao, Y.; Wang, H.; Zhang, W.; Yao, Z.; Liu, S.; Zhong, X.; Sun, C. Research on the estimation of wheat AGB at the entire growth stage based on improved convolutional features. J. Integr. Agric. 2024, in press. [Google Scholar] [CrossRef]
- Singh, R.K.; Biradar, C.M.; Behera, M.D.; Prakash, A.J.; Das, P.; Mohanta, M.R.; Krishna, G.; Dogra, A.; Dhyani, S.K.; Rizvi, J. Optimising carbon fixation through agroforestry: Estimation of aboveground biomass using multi-sensor data synergy and machine learning. Ecol. Inform. 2024, 79, 102408. [Google Scholar] [CrossRef]
- Liu, Y.; Fan, Y.; Feng, H.; Chen, R.; Bian, M.; Ma, Y.; Yue, J.; Yang, G. Estimating potato above-ground biomass based on vegetation indices and texture features constructed from sensitive bands of UAV hyperspectral imagery. Comput. Electron. Agric. 2024, 220, 108918. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Stark, R.; Grits, U.; Rundquist, D.; Kaufman, Y.; Derry, D. Vegetation and soil lines in visible spectral space: A concept and technique for remote estimation of vegetation fraction. Int. J. Remote Sens. 2002, 23, 2537–2562. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D.A. Color Indices for Weed Identification Under Various Soil, Residue, and Lighting Conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Sunoj, S.; Hammed, A.; Igathinathane, C.; Eshkabilov, S.; Simsek, H. Identification, Quantification, and Growth Profiling of Eight Different Microalgae Species Using Image Analysis. Algal Res. 2021, 60, 102487. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, D.; Zhang, G.; Wang, J. Estimating Nitrogen Status of Rice Using the Image Segmentation of G-R Thresholding Method. Field Crops Res. 2013, 149, 33–39. [Google Scholar] [CrossRef]
- Verrelst, J.; Schaepman, M.E.; Koetz, B.; Kneubühler, M. Angular Sensitivity Analysis of Vegetation Indices Derived from CHRIS/PROBA Data. Remote Sens. Environ. 2008, 112, 2341–2353. [Google Scholar] [CrossRef]
- Peñuelas, J.; Gamon, J.A.; Fredeen, A.L.; Merino, J.; Field, C.B. Reflectance Indices Associated with Physiological Changes in Nitrogen- and Water-Limited Sunflower Leaves. Remote Sens. Environ. 1994, 48, 135–146. [Google Scholar] [CrossRef]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS; NASA: Washington, DC, USA, 1974; Volume 1. [Google Scholar]
- Wang, F.M.; Huang, J.F.; Tang, Y.L.; Wang, X.Z. New Vegetation Index and Its Application in Estimating Leaf Area Index of Rice. Rice Sci. 2007, 14, 195–203. [Google Scholar] [CrossRef]
- Broge, N.H.; Leblanc, E. Comparing prediction power and stability of broadband and hyperspectral vegetation indices for estimation of green leaf area index and canopy chlorophyll density. Remote Sens. Environ. 2001, 76, 156–172. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Mishra, S.; Mishra, D.R. Normalized difference chlorophyll index: A novel model for remote estimation of chlorophyll-aconcentration in turbid productive waters. Remote Sens. Environ. 2012, 117, 394–406. [Google Scholar] [CrossRef]
- Dunn, W.J.; Scott, D.R.; Glen, W.G. Principal components analysis and partial least squares regression. Tetrahedron Comput. Methodol. 1989, 2, 349–376. [Google Scholar] [CrossRef]
- Kim, B.C.; Joe, D.; Woo, Y.; Kim, Y.; Yoon, G. Extension of pQSAR: Ensemble Model Generated by Random Forest and Partial Least Squares Regressions. IEEE Access 2020, 8, 180087–180099. [Google Scholar] [CrossRef]
- Schonlau, M.; Zou, R.Y. The random forest algorithm for statistical learning. Stata J. 2020, 20, 3–29. [Google Scholar] [CrossRef]
- Guven, G.; Samkar, H. Examination of Dimension Reduction Performances of PLSR and PCR Techniques in Data with Multicollinearity. Iran. J. Sci. Technol. Trans. Sci. 2019, 43, 969–978. [Google Scholar] [CrossRef]
- Sherstinsky, A. Fundamentals of Recurrent Neural Network (RNN) and Long Short-Term Memory (LSTM) network. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef]
- Zhang, M.; Zhu, D.; Su, W.; Huang, J.; Zhang, X.; Liu, Z. Harmonizing Multi-Source Remote Sensing Images for Summer Corn Growth Monitoring. Remote Sens. 2019, 11, 1266. [Google Scholar] [CrossRef]
- Li, Y.; Li, M.; Li, C.; Liu, Z. Forest above ground biomass estimation using Landsat 8 and Sentinel-1A data with machine learning algorithms. Sci. Rep. 2020, 10, 9952. [Google Scholar] [CrossRef]
- Latif, S.D.; Hazrin, N.A.B.; Koo, C.H.; Ng, J.L.; Chaplot, B.; Huang, Y.F.; El-Shafie, A.; Ahmed, A.N. Assessing rainfall prediction models: Exploring the advantages of machine learning and remote sensing approaches. Alex. Eng. J. 2023, 82, 16–25. [Google Scholar] [CrossRef]
- Safonova, A.; Ghazaryan, G.; Stiller, S.; Main-Knorn, M.; Nendel, C.; Ryo, M. Ten deep learning techniques to address small data problems with remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2023, 125, 103569. [Google Scholar] [CrossRef]
- Shu, M.; Li, Q.; Ghafoor, A.; Zhu, J.; Li, B.; Ma, Y. Using the plant height and canopy coverage to estimation maize aboveground biomass with UAV digital images. Eur. J. Agron. 2023, 151, 126957. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Color Indices | Formula | Reference |
|---|---|---|
| r | R/(R + G = B) | |
| g | G/(R + G = B) | |
| b | B/(R + G = B) | |
| VRAI | (g − r)/(g + r − b) | [28] |
| ExG | 2g − r − b | [29] |
| MGRVI | (g2 − r2)/(g2 + r2) | [30] |
| NDI | (r-g)/(r + g + 0.01) | [29] |
| BRRI | 3g − 2.4r − b | [29] |
| GRRI | (g2 − br)/(g2 + br) | [31] |
| RGRI | R/G | [32] |
| BGRI | B/G | [29] |
| NPCI | (R − B)/(R + B) | [33] |
| IF | (2G − R − B)/(G − B) | [30] |
| VEG | G/(R0.667 × B0.333) | [34] |
| WI | (G − B)/(R − G) | [29] |
| NDVI | NDVI = (NIR − R)/(NIR + R) | [35] |
| GDNVI | GNDVI = (NIR − G)/(NIR + G) | [36] |
| OSAVI | OSAVI = 1.16 × (NIR − R)/(NIR + R + 0.16) | [37] |
| RVI | RVI = NIR/R | [26] |
| RVI2 | RVI2 = NIR/G | [38] |
| Growth Stage | Three-Leaf Stage | Emergence Stage | Jointing Stage | Large Flare Opening Stage | Tasseling Stage | Flowering Stage | |
|---|---|---|---|---|---|---|---|
| Model | |||||||
| LTSM(CIS) | 0.524 | 0.516 | 0.633 | 0.649 | 0.546 | 0.634 | |
| RF(CIS) | 0.521 | 0.509 | 0.471 | 0.446 | 0.537 | 0.489 | |
| PLSR(CIS) | 0.376 | 0.369 | 0.357 | 0.401 | 0.323 | 0.356 | |
| Growth Stage | Three-Leaf Stage | Emergence Stage | Jointing Stage | Large Flare Opening Stage | Tasseling Stage | Flowering Stage | |
|---|---|---|---|---|---|---|---|
| Model | |||||||
| LTSM(CIS) | 0.731 | 0.732 | 0.734 | 0.744 | 0.721 | 0.723 | |
| RF(PH+CIS) | 0.614 | 0.6 | 0.687 | 0.629 | 0.576 | 0.602 | |
| PLSR(PH+CIS) | 0.473 | 0.453 | 0.479 | 0.552 | 0.395 | 0.473 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, Q.; Yu, X.; Li, Z.; Du, Y.; Ai, Z.; Qian, L.; Huo, X.; Fan, K.; Wang, W.; Hu, X. Estimating Summer Maize Biomass by Integrating UAV Multispectral Imagery with Crop Physiological Parameters. Plants 2024, 13, 3070. https://doi.org/10.3390/plants13213070
Yin Q, Yu X, Li Z, Du Y, Ai Z, Qian L, Huo X, Fan K, Wang W, Hu X. Estimating Summer Maize Biomass by Integrating UAV Multispectral Imagery with Crop Physiological Parameters. Plants. 2024; 13(21):3070. https://doi.org/10.3390/plants13213070
Chicago/Turabian StyleYin, Qi, Xingjiao Yu, Zelong Li, Yiying Du, Zizhe Ai, Long Qian, Xuefei Huo, Kai Fan, Wen’e Wang, and Xiaotao Hu. 2024. "Estimating Summer Maize Biomass by Integrating UAV Multispectral Imagery with Crop Physiological Parameters" Plants 13, no. 21: 3070. https://doi.org/10.3390/plants13213070
APA StyleYin, Q., Yu, X., Li, Z., Du, Y., Ai, Z., Qian, L., Huo, X., Fan, K., Wang, W., & Hu, X. (2024). Estimating Summer Maize Biomass by Integrating UAV Multispectral Imagery with Crop Physiological Parameters. Plants, 13(21), 3070. https://doi.org/10.3390/plants13213070