Abstract
The article presents a viewpoint on the current status and limitations of humanoid robotics and possible future progress. It may be seen as a continuation of the article “How far away is artificial man?” published in 2001 by a group of authors, among them the author of the present text, in IEEE Robotics &Automation Magazine (IEEE RAM). The previous article defined three key aspects of advanced humanoids, namely human-like shape and motion, intelligence, and communication. The current article discusses the situation 18 years later and takes note of the trend towards biologically inspired solutions to technical problems. It might appear to put forward controversial ideas, but the author believes they are realistic observations and constitute a frank presentation of apparent tendencies. The author argues that the crucial breakthrough towards an “artificial man” has not yet been made, as formidable challenges remain and cannot be overcome easily in the near future. On the other hand, the question arises: After unsuccessful attempts to solve robotic problems by designing technical systems that increasingly imitate humans, can we finally drop out of engineering and completely turn to biology and look for solutions there? This controversial idea means artificial creation and mass production of human beings that behave like robots, i.e., robomimetic humans. The article is a brief reality check of this concept.
1. Introduction and Background
The beginning of this story dates back to the year 2001, at which time the field of home robotics or personal robotics was expected to explode and open a new and large market, attracting major investments, and ultimately resulting in a huge benefit for robotic research and industry. The impact of this robotic revolution on human society was supposed to be as large as that of the advent of personal computers. At that time, it was already widely accepted that home/personal robots would be of anthropomorphic shape, which led to increased interest in humanoid robotics.
In 2001, a group of renowned authors, among them the author of the present article, recognized that it was the right time for a wide and coordinated effort towards the realization of an “artificial man”, a humanoid robot capable of replacing humans in industrial and nonindustrial tasks generally assigned only to humans, particularly those relating to our homes and services in general. Consequently, personal robots were the primary target. The authors summarized their ideas in the article titled “How Far Away is Artificial Man?” and published it in [1]. The article stated three key aspects (3KA) of personal robots, posing that they should feature human-like characteristics in their behavior regarding
- -
- shape and motion,
- -
- intelligence, and
- -
- communication.
The 3KA statement was derived from the idea that personal robots would “live” with humans, move and work in an environment designed for humans, accomplish human task, and communicate in a human-friendly way. It was also noted that the human feeling of comfort would strongly depend on the human’s psychological sense about the robotized assistant. This supported the conclusion that the achievement of human-like behavior of robots was essential.
Now, one of the authors of the previously mentioned article poses a crucial question: Did the expected robotic revolution happen? Unfortunately, the answer is: Not yet! The expectation was too optimistic.
Naturally, we are rather interested in exploring the reasons for the “delay”, i.e., what actually were the problems, and where was the bottleneck? This motivated the present article. The reader will see that the attempt to find solutions to obviously rather difficult problems will lead to unexpected, controversial, and even scary questions. To retain the reader’s interest and capture their imagination, let us recall the sentence that closed the previous article [1]: “After all, it is not difficult to imagine that it may not be long before biologists construct a “perfect personal robot”, i.e., a real human, cloned and genetically engineered with all the attributes of a perfect “battler” (a worker, a soldier?) despite all the ethical, moral, and sociological problems that may exist”.
Let us reconsider the 3KA of a personal robot.
2. Human-Like Shape and Motion—Current Status and Trends
2.1. Humanoid Robots
When speaking about a robot’s shape and motion, we have in mind its mechanical construction and actuators. It is widely accepted that a future personal robot will be anthropomorphic or, as commonly called, humanoid. These terms are usually associated with the robot’s external appearance, with two legs, two arms, and head. The reasons for choosing the humanoid shape lie in the fact that such personal robots will best maneuver in a human environment and its soft human-like motion will be readily accepted by humans [2,3,4].
Scientific work targeting humanoid robots began in Belgrade in the 1960/70s with artificial bipedal gait research, resulting in the famous Zero-Moment-Point (ZMP) theory of dynamic stability [5,6]. Japanese robots WABOT-1 and WABIAN [7] were the first full-body humanoids. In the 1990s, HONDA started its series of humanoids, which ended with the famous Asimo [8,9]. Other advanced humanoids that should be mentioned are Boston Dynamics’ Petman and Atlas [10,11].
The above humanoids, due to their external appearance, are often described as bio-inspired. However, in the opinion of this author, it is the time to redefine the term bio-inspired and use it only for robots which gave up the engineering principles in design and turned to mimicking biological paragons. So, calling Petman and Atlas bio-inspired is not correct. These robots are still machines, obeying all the principles of classical machine design: single-axis mechanical joints driven by standard actuators. Such a design inevitably results in some drawbacks. For example, a spherical three-axis joint, present in the human shoulder and hip, cannot be implemented in robots due to the single-axis structure of all actuators today. In the next example, the ballistic effect important in human leg and arm motions cannot be achieved and exploited in robots because the gearboxes are not back-drivable.
2.2. Anthropomimetic Robots
The drawbacks of humanoid robots cannot be eliminated and thus constitute limitations for the classical engineering approach to the design of the robot’s mechanical structure. A new design concept, namely the anthropomimetic concept promoted by Holland in [12,13], was the way to overcome the limitations. Anthropomimetic means that the robot does not just look like a human from the outside but its inner structure and the way it functions imitate a human. An anthropomimetic robot has a skeleton that closely emulates a human’s and artificial muscles to move it. The robot can thus acquire advanced features, which had previously been “reserved” for humans: spherical joints, actuation redundancy, ballistic effect, etc. The resulting robot is actually a machine, but its design does not conform to engineering principles. Instead, it mimics a biological/human paragon. It would now be justifiable to speak about bio- or human-inspired robots. Such robots are supposed to have improved maneuverability. Additional support to the anthropomimetic principle came from artificial intelligence. Pfeifer [14] stated that a robot cannot achieve human-like intelligence if it does not have human-like experience in its motion and interaction with its environment. This concept required robots that imitated human morphology [12,13].
The two top examples of anthropomimetic robots are ECCEROBOT and Kojiro/Kenshiro.
ECCEROBOT (embodied cognition in a compliantly engineered robot) was the European FP7 project [15,16] aimed at exploring the possibility of designing a robot that imitates human morphology and intelligence. The robot’s skeleton copied the human pelvis and upper body (Figure 1). Artificial muscles consisted of cords, pulleys, and DC motors.
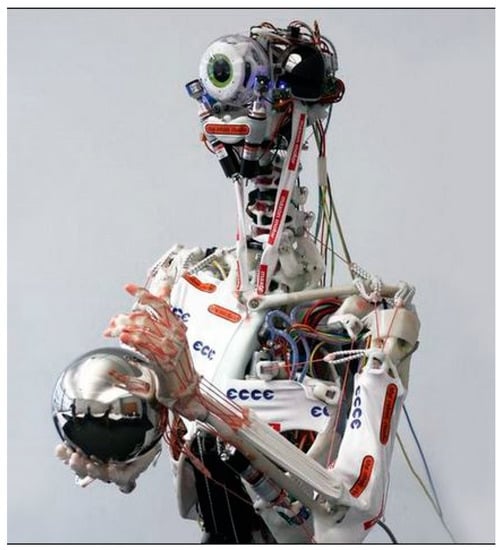
Figure 1.
ECCEROBOT prototype.
Kojiro and Kenshiro [17,18] are full-body robots (Figure 2) developed at Inaba Laboratory, University of Tokyo. The key difference from ECCEROBOT was in the actuation. Kojiro and Kenshiro used artificial muscles based on pneumatics.
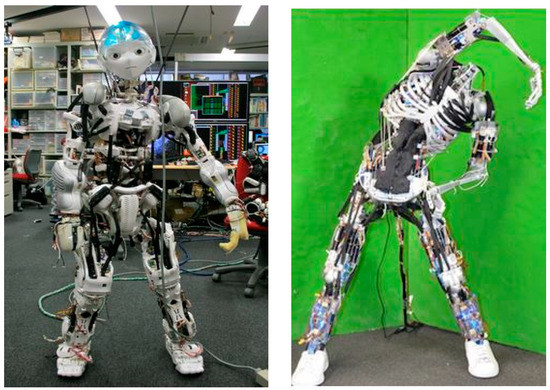
Figure 2.
Kojiro and Kenshiro prototypes.
The conclusion drawn from these projects was that human-inspired robots should be controlled by cognitive methods, that is, in a human-inspired way. However, control is a tough problem and among the weak points of these robots. The other weak points originate from the adopted actuation approach. The artificial muscles used prevent proper copying of various human muscles. Consequently, the robots’ maneuverability is still limited.
2.3. Biological Actuators
Available artificial muscle technologies are still not up to the task and hence create a bottleneck in the development of anthropomimetic robots. To finally resolve this problem, some researchers have turned to a radical solution: they are trying to replace artificial muscles with live biological muscles. Herr and Dennis [19] developed a swimming robot actuated by living muscle tissue taken from a frog. Cvetkovic et al. [20] demonstrated simple walking “bio-bots” powered by rat muscle tissue.
So, “biological actuators” are coming, and leading to hybrid bio-technical systems. Science uses biology to solve engineering problems. However, a few important questions arise. The author of the present article is fully aware of all the ethical concerns that will emerge from the elaboration of the questions and solutions, but discussion is necessary even when topics are controversial. Let us therefore look at the questions-problems and possible solutions.
Firstly, how can such a biological actuator be controlled? There is vast experience behind the control of human extremities through electrical stimulation. It is safe to say that efficient control of biological actuators is imminent.
Secondly, how can muscle actuators be “produced/manufactured”? In research experiments, muscle tissue was taken from animals. However, what do we do if mass “production” is needed? The only way is to somehow grow muscle tissue like plants! Is this possible? It seems that it might be. Professor Post [21] developed a “cultured beef” technology: painlessly harvesting muscle cells from a living cow and then feeding and nurturing the cells so that they multiply to create muscle tissue. The idea for this research actually came from the food industry with attempts at making a “cultured burger”. A recent attempt to make a small robot joint with antagonistic drives based on cultured muscle tissue is reported in [22]. Stem cells offer new possibilities to grow tissue.
However, a problem still present is that a fully-operational muscle actuator means not just muscle cells, but nerves and blood vessels as well.
Finally, how should energy be supplied to the biological actuator/muscle? Live muscles need to be fed. Therefore, artificial blood flow is required to deliver oxygen and nutrients and remove combustion products. This would entail the implementation of several artificial organs (heart to provide flow, lungs to supply the blood with oxygen, and liver and kidney to purify the blood).
It seems that developing a fully-operational biological actuator is not a promising effort.
We can only conclude that a satisfactory solution for human-likeness in shape and maneuverability, one of the key attributes of an artificial man, is still lacking.
3. Human-Like Intelligence–Current Status and Trends
Human-like intelligence (HLI) is not a common term in technical sciences. It is a rather wide notion that stretches from high-level intelligence, where algorithms emulate intellectual processes like reasoning and logical thinking, to low-level intelligence where motion patterns are learned from experience to create motion skills. Regardless of the still somewhat fuzzy content, it is important to note that HLI agrees with general trends to look for biologically inspired solutions to technical problems, and in particular with advanced humanoid robotics. The biologically inspired approach is supposed to produce engineering systems with some attributes of biological organisms, such as adaptivity, robustness, versatility, and agility.
To discuss the current status of HLI, let us begin with the “classical” approach to artificial intelligence (AI). Technologies classified under AI, relying on the leading AI textbook by S. Russell [23], are identified as: intelligent agents, problem solving, searching, knowledge and reasoning, and learning. One might wish to add other technologies, like neural networks, deep learning, genetic algorithms.
We can easily agree that AI has a major impact on a number of technologies and systems encountered and used in our everyday life. Let us mention two examples. One is the navigation system in many of our cars. The other example is IBM’s chess-playing computer Deep Blue, which beat the world champion Garry Kasparov.
Regardless of many successful applications of conventional AI, several new trends question the classical approach, demystify it, and offer a different view of AI [24]. Consider the two above-mentioned examples as illustrations. The first example (car navigation) involves problem solving, a modern and complex version of the well-known traveling-salesman problem. It is solved by checking different options, namely by searching an appropriate database. In the chess example, an expert system is needed, which is based on a rich and well-organized knowledge base and a fast search method. At the core of the two examples (and in most other conventional AI applications) is the “good old” search problem but with new “makeup”. The same is with a popular Deep Learning concept [25] for which Macmillan dictionary says: “Research into the principles underlying machine learning and deep learning dates right back to the 1950s, but the terms themselves only really emerged in the 2000s alongside revolutionary advances in computing and the setting aside of earlier scepticism about data-driven, statistical approaches to AI”. Now, what about intelligence? Well, one may say that searching a database does not require much intelligence [24].
Within the scope of the new approach, it is apparent that the previously mentioned classical AI topics consider general problems and methods, and that they are not object-specific, whereas the new approach insists on a close relationship between the object’s kinematic/dynamic structure and its intelligence. This new concept is called embodied artificial intelligence [14,26]. The fundamental problem is how thinking emerges from an embodied system (e.g., “How does walking relate to thinking?”).
Turning our attention back to robotics, embodied AI can be formulated as Pfeifer’s anthropomimetic principle [14], who stated that achieving human-like intelligence requires human-like experience in motion and interaction with surroundings. Let us expand on this: a dog’s experience would induce dog-like intelligence, a car autopilot’s experience is expected to generate car intelligence, and so on.
However, if we ask whether decisive solutions in AI have been reached to allow for the development of a truly useful personal robot, the answer is: unfortunately not! Roboticists are not pleased with the current level of HLI development and the pace of progress.
Since any talk about AI refers to human intelligence, as an explicit or implicit norm, it is not surprising that researchers are extensively studying the human brain, to learn how CNS works and then let the computer brain imitate. A good example is the Kawato Dynamic Brain Project [27,28,29,30]. The goal was to understand the brain mechanisms of human cognition and sensory-motor learning to the extent that one can reproduce them as computer programs and robotic systems. However, neurology has not made a decisive breakthrough towards fully functional human-like intelligence and control.
4. Human-Like Communication—Current Status and Trends
Human-like communication will be discussed only briefly since the intent is to mainly elaborate on the bottlenecks. The communication aspect of personal robotics is progressing well towards what is needed. It is moving forward, pushed by market demand for more efficient and user-friendly communication with high-tech devices.
Solving automatic recognition of printed and handwritten texts was the first step. The next steps, speech recognition and speech generation, finally opened the way to truly user-friendly communication with future personal robots. Due to extensive literature on the subject and limited space, references for these “standard” topics are reduced to one giving a general information on the topic [31] and those illustrating the most widely used systems [32,33,34].
Recent and ongoing research explores how humans use their body gestures and facial expressions to demonstrate their feelings and physical and mental states. This novel, nonverbal communication includes a variety of different concepts and is not often discussed in standard literature. For illustration, we mention two interesting approaches. One uses mathematical models of robot dynamics and motor thermal dynamics to generate robot motion that will, in case of overload, be recognized by humans as fatigue [35]. The other concept is among most attractive references in humanoid robotics: work on “geminoids” by Ishiguro [36].
5. What Now?
5.1. Anthropomimetic Robot
Let us briefly conclude the discussion on the three key aspects (3KA) of personal robots. In order to avoid any misunderstanding, the insufficiently specific term “artificial man” will not be used in this context, but rather the clearer expression “anthropomimetic robot”. It is slightly broader than originally defined in [12,13], now meaning a robot that fulfils all three key aspects as far as possible.
Let us examine the conclusions.
Human-like shape is considered a presumption of improved maneuverability. However, conventional actuators do not support designing of a robot’s mechanical structure that fully resembles the human skeleton. Artificial muscles have not met expectations. The attempt to develop and implement biological actuators (live muscles) faces substantial problems.
A satisfactory solution for the required robot’s human-like shape and motion is still missing and not likely to happen anytime soon.
An operational human-like intelligence (HLI) is another assumed attribute of the anthropomimetic robot. The limitations of conventional AI arise from the very principles behind this technology—searching databases. New concepts, like embodiment, are promising but remain to be proved in the context. Brain research has not answered the key questions. So, the solution to operational HLI is still missing and not expected in the near future.
The third aspect, human-like communication, is progressing well.
Consequently, there is a disparity between our wish to build a fully-operational anthropomimetic robot and the limitations imposed by available technologies. The limitations are rather serious, and it is still unclear how to overcome them.
5.2. Robomimetic Human
There is a potential solution which, however, raises many ethical and legal issues. The author of this article wishes to stress that he in no way supports the solutions that will be presented here. He simply thinks that the scientific community needs to be warned and made aware of all the possibilities.
In light of the bottlenecks that robotic engineers face, increasing interest in biological solutions is a definite possibility. However, this time it would be looking for not just a biological paragon, but also a complete biological alternative. Instead of engineers creating a robot that behaves like a human, biologists can artificially create a human being that behaves like a robot. We can call such a being a robomimetic human. In some way, such a human would be programmable and specialized in particular tasks, to be a worker, housekeeper, soldier, or the like. Such a solution sounds very radical, but it can be considered a logical and expected next step after work on biological actuators opened “Pandora’s Box”.
The first technology that should be mentioned is cloning. The most famous cloning experiment was Dolly, a domestic sheep cloned at the Roslin Institute, University of Edinburgh, and the biotechnology company PPL Therapeutics [37,38]. Dolly was the first mammal cloned from an adult somatic cell, using the process of nuclear transfer. Dolly was born in 1996 and had three mothers: one provided the egg, another the DNA, and the third carried the cloned embryo to term. This is how the DNA donor was replicated.
After Dolly was cloned, there have been a number of other experiments with different mammals. The problem still waiting for a solution is how to eliminate the need for a surrogate mother (a biological “host” that carries the embryo) and replace it with an artificial uterus. Cloning technology opens the scary possibility of “mass producing” animals and perhaps even humans.
In order to create a dedicated/specialized robomimetic human (worker, soldier, etc.), some task-specific features will have to be provided. Here, we have physical attributes in mind, like proper height, strength, speed, eyesight, and selective mental potential. This can be achieved by genetic engineering methods. Practical techniques for manipulating cell content were already available in 2003, when research on decoding of the human genome was completed and gave a new boost to genetic engineering [39,40,41]. To show how serious this direction of research may become in future, we mention that the first genetically edited babies have been already born (twin girls in 2018 and the third baby in 2019) [42,43]. For this “illegal medical practice”, a Chinese court sentenced biomedical scientist He Jiankui to prison.
Once human “hardware” with proper attributes is made, training for future work can be considered as programming.
5.3. Robotics in Science Fiction
If biological actuators opened Pandora’s Box, then cloning and genetic engineering kept it open. It may become possible to fulfill Karel Capek’s vision presented in his famous science fiction (SF) play “RUR” (1920)—mass production of specialized robomimetic humans whom Capek called simply robots. Speaking of SF, it might be interesting to see whether SF authors had deliberated whether to build a robot as a machine that looks and behaves like a human, or to artificially create a human that executes commands like a robot. It appears the dilemma has been present since the very first appearance of the notion “robot”. Karel Capek imagined robots as live robomimetic humans. A few years later, in 1927, German film director Fritz Lang made his epic SF film “Metropolis”. The robot in that film was a machine shaped like a girl and covered with artificial skin, so an anthropomimetic robot. This dilemma has continued to challenge SF authors. Recent illustrations are the anthropomimetic robot C-3PO in the famous SF saga “Star Wars” and robomimetic humans called replicants in “Blade Runner”.
When speaking of robots in SF, it is inevitable to mention Isaac Asimov, not only because a large part of his opus is dedicated to robots, but also because he went deeper into that matter than all other SF authors. His imagination and the belief in robot progress were such that he felt the need to regulate the robot existence and behavior in the world of humans. For this purpose, he formulated the famous “three laws of robotics”, implying that robots would be able to make decisions and take responsibility. What is fascinating is that this happened as early as in 1942 when the laws were introduced in Asimov’s short story “Runaround”. It is clear that the robots for which Asimov formulated his laws do not exist yet and are still a fiction. However, robots with such abilities are set as a target. Another fascinating ability intrigued Asimov, namely the ability to predict. The current dilemma, engineering or biological robots, in Asimov’s literature was touched on but not elaborated. There appeared two type of robots. One type were robots intended for work in industry or services and they looked like mechanical creatures, while the second type were robots expected to closely interact with humans and they looked like living beings. No details were given but one should keep in mind that Asimov’s opus belongs to the age before cloning and genetic engineering
This short discussion on SF in robotics, shows once again that the ideas of good authors of SF sometimes precede science and technology.
5.4. Ethical and Legal Issues
Ethical concerns are mentioned several times during the paper. While the “controversial” research is presented, it would be interesting to see more details about the current ethical limits (with references to relevant laws) concerning what is currently allowed (according to UN, EU, and national ruling etc.), and what is not. There are two technologies that make this paper controversial: cloning and genetic engineering.
Cloning. We will narrow our consideration to reproductive human cloning. This means making an identical copy of a human being. Many attempts have been made to summarize pros and cons of this technology, but definite answers are still lacking. Different fields of science have found interest in the topic of cloning ethics: biology, medicine, engineering, philosophy, law, theology, etc. Reference [44] is a collection of articles by respected experts in various fields. The articles were published two years after Dolly was born, that is, while the topic was still hot. A more recent reflection on the ethics of cloning is given in [45]. Anyway, the impression is that the attitude of the wider public to human reproductive cloning is rather negative.
The legal system is supposed to reflect the opinion of the general public, but also the views of science and economics. Reference [46] gives an overview of how different legal systems view our current topic, reproductive human cloning.
UN: In 2001, the United Nations General Assembly started working on an international convention against the reproductive cloning of humans. A broad coalition of states, including Spain, Italy, US, the Holy See, etc., sought to extend the debate to ban all forms of human cloning since in their opinion, even therapeutic human cloning violates human dignity. A consensus on a binding convention could not be reached. Thus, in March 2005, a non-binding UN Declaration on Human Cloning, calling for the ban of all forms of human cloning contrary to human dignity, was adopted.
EU: The Charter of Fundamental Rights of the European Union explicitly prohibits reproductive human cloning. The charter is legally binding for the institutions of the European Union under the Treaty of Lisbon.
Council of Europe: The European Convention on Human Rights and Biomedicine prohibits human cloning in its additional protocol ratified by 25 states.
UK: After several legal processes, Parliament passed the Human Reproductive Cloning Act 2001 which explicitly prohibited reproductive cloning. The therapeutic cloning is not banned but is under control.
US: After extensive legal processes which seems to have been more fund-oriented (private vs. public funding) then ethical, the situation is the following. There are currently no federal laws in the US which ban cloning completely. Fifteen American states ban reproductive cloning and three states prohibit use of public funds for such activities. Ten states have “clone and kill” laws that prevent cloned embryo implantation for childbirth, but allow embryos to be destroyed after experiment.
Russia: In 2002, Russian President signed this moratorium on the implementation of human cloning. In 2010 The Federal Assembly introduced second revision of this law without time limit.
China: While reproductive human cloning is forbidden, China has declared that they are not opposed to the creation of clonal embryos for research.
Serbia: Human cloning is explicitly prohibited in Article 24, “Right to Life” of the 2006 Constitution of Serbia.
To summarize, a clear majority of countries are against human cloning, but it is also evident that there is pressure from scientific and business circles to lift the ban on at least some topics such as human embryo cloning and experiments.
Genetic engineering. Our discussion will primary concern human genetic modifications, but we will start from the very beginning of gene-manipulation technology. It has always been and it still is a source of controversy. Initially, these were modifications to plants used in human or animal nutrition. One of the two rather irreconcilable scientific groups bothered that genetically modified plants provide higher yields and will contribute to solving the problem of world hunger. The second group considered that these plants were harmful to eat and that even the meat of animals fed with modified plants was harmful. The general public as well as business circles got involved in this discussion and division.
Decoding the human genome has opened up a much more delicate and controversial field of research, namely genetic modification in humans. Although this technology provides some positive possibilities, such as the prevention of hereditary diseases, the vast majority of the scientific and general public are frightened by the possibility of creating human individuals with “required and planned” physical and mental characteristics. Despite the negative attitude of the public and the laws that prohibit them, such experiments are being conducted, as evidenced by the previously mentioned case of the birth of genetically modified babies [42,43].
Regarding these delicate research topics, it can be said that the history of science teaches us that if a scientific idea is attractive and if there is a possibility of funding, a way to implement the idea will be found, legally or illegally.
6. Conclusions
Conclusions about this subject matter are rather tricky. Section 1, Section 2, Section 3 and Section 4 provided a frank review of the achievements and problems/limitations of the technologies aimed at resolving the three key aspects of anthropomimetic robots: human-like shape and motion, human-like intelligence, and human-like communication. The first two aspects involve significant challenges that cannot be worked out in the near future.
Up to that point, the review had a solid foundation and was indisputable. Section 5, however, is a bit problematic. It warns that the tendency to solve technical problems using biological paragons can become unmanageable. Facing technical bottlenecks and limitations, researchers may look for entirely different solutions and replace engineering with biology. Relevant biological techniques: cloning and genetic engineering based on the decoded human genome, were discussed to examine this option. The conclusion is that there is no substantial problem preventing research and ultimate biological solutions. This may look like a shortcut to the development of a functional artificial man. However, the output is rather questionable and doubtful. The fact that this idea generates serious ethical, legal, and sociological concerns will not halt the research.
It could be noted that this paper, when discussing possible future research and its outcome, placed a stronger emphasis on the “dark side” of robotics. We have in mind the possible emergence of a new type of slaves, namely cloned and genetically engineered workers, soldiers, etc. In order to avoid a greater discrepancy between attention given to the “dark and bright sides”, this author wishes to remind the reader that humanoid robotics was born from the idea of developing advanced prostheses, orthoses, and other robotic systems intended to help the elderly and the disabled. The author wants to believe that future research will find a way to maintain the original “bright” ideals.
Instead of a final conclusion, let us end this article by repeating the last sentence of the preceding article (Ref. [1]): “After all, it is not difficult to imagine that it may not be long before biologists construct a “perfect personal robot”—a real human, cloned and genetically engineered with all the attributes of a perfect “battler” (a worker, a soldier?)”, and comment that if this happens, it will be one of greatest ethical, moral, and sociological challenges ever.
Funding
This research received no external funding.
Conflicts of Interest
The author declares no conflict of interest.
References
- Fukuda, T.; Michelini, R.; Potkonjak, V.; Tzafestas, S.; Valavanis, K.; Vukobratovic, M. How far away is artificial Man. IEEE Robot. Autom. Mag. 2001, 8, 66–73. [Google Scholar] [CrossRef]
- Zlotowski, J.; Proudfoot, D.; Yogeeswaran, K.; Bartneck, C. Anthropomorphism: Opportunities and challenges in human-robot interaction. Intl. J. Soc. Robot. 2015, 7, 347–360. [Google Scholar] [CrossRef]
- Ogawa, K.; Mori, M.; Hirai, A.; Tsuchiya, K.; Yuhara, H. Analysis of emotions for moving things. Jpn. J. Ergon. 1989, 25, 243–251. [Google Scholar] [CrossRef][Green Version]
- Shibata, S.; Inooka, H. Psychological evaluations of robot motions. Int. J. Ind. Ergon. 1998, 21, 483–494. [Google Scholar] [CrossRef]
- Juricic, D.; Vukobratovic, M. Mathematical modeling of a bipedal walking system. ASME Publ. 1972, 72-WA/BHF-13. [Google Scholar]
- Vukobratovic, M. Legged Locomotion Robots and Anthropomorphic Mechanisms, Based on the Final Report of the Project: Active Exoskeleton for Paraplegics; Institute “M. Pupin”: Belgrade, Yugoslavia, 1974. [Google Scholar]
- Biped Humanoid Robot. Available online: http://www.takanishi.mech.waseda.ac.jp/top/research/wabian/previous_reserch/previous_research.htm (accessed on 2 April 2020).
- HONDA Robotics. Available online: https://global.honda/innovation/robotics/ASIMO.html (accessed on 2 April 2020).
- Hirai, K. Current and future perspective of Honda humanoid robots. In Robotics Research; Springer: London, UK, 1998; pp. 446–450. [Google Scholar]
- Nelson, G.; Saunders, A.; Playter, R. The PETMAN and atlas robots at boston dynamics. In Humanoid Robotics: A Reference; Goswami, A., Vadakkepat, P., Eds.; Springer: New York, NY, USA, 2018; pp. 169–186. [Google Scholar]
- Boston Dynamics-Atlas. Available online: https://www.bostondynamics.com/atlas (accessed on 4 April 2020).
- Holland, O.; Knight, R. The anthropomimetic principle. In Proceedings of the AISB’06 (Adaptation in Artificial and Biological Systems), London, UK, 4 April 2006. [Google Scholar]
- Diamond, A.; Knight, R.; Devereux, D.; Holland, O. Anthropomimetic robots: Concept, construction and modelling, invited paper. Int. J. Adv. Robot. Syst. 2012, 9, 209. [Google Scholar] [CrossRef]
- Pfeifer, R.; Lungarella, M.; Iida, F. Self-organization, embodiment, and biologically inspired robotics. Science 2007, 318, 1088–1093. [Google Scholar] [CrossRef] [PubMed]
- The ECCEROBOT Project. Available online: eccerobot.org (accessed on 4 April 2020).
- Wittmeier, S.; Alessandro, C.; Bascarevic, N.; Dalamagkidis, K.; Diamond, A.; Jantsch, M.; Jovanovic, K.; Knight, R.; Marques, H.G.; Milosavljevic, P.; et al. Towards anthropomimetic robotics. Artif. Life Winter 2013, 19, 171–193. [Google Scholar] [CrossRef] [PubMed]
- Mizuuchi, I.; Nakanishi, Y.; Sodeyama, Y.; Namiki, Y.; Nishino, T.; Muramatsu, N.; Urata, J.; Hongo, K.; Yoshikai, T.; Inaba, M. An advanced musculoskeletal humanoid kojiro. In Proceedings of the 7th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2007), Pittsburgh, PA, USA, 29 November–1 December 2007. [Google Scholar] [CrossRef]
- Nakanishi, Y.; Ohta, S.; Shirai, T.; Asano, Y.; Kozuki, T.; Kakehashi, Y.; Mizoguchi, H.; Kurotobi, T.; Motegi, Y.; Sasabuchi, K.; et al. Design approach of biologically-inspired musculoskeletal humanoids. Int. J. Adv. Robot. Syst. 2013, 10, 216. [Google Scholar] [CrossRef]
- Herr, H.; Dennis, R.G. A swimming robot actuated by living muscle tissue. J. Neuro Eng. Rehabil. 2004, 1, 1–9. [Google Scholar] [CrossRef]
- Cvetkovic, C.; Raman, R.; Chan, V.; Williams, B.J.; Tolish, M.; Bajaj, P.; Sakar, M.S.; Asada, H.H.; Saif, M.T.A.; Bashir, R. Three-dimensionally printed biological machines powered by skeletal muscle. Proc. Natl. Acad. Sci. USA 2014, 111, 10125–10130. [Google Scholar] [CrossRef] [PubMed]
- Cultured Meat. Available online: http://culturedbeef.net/mark-post/ (accessed on 4 April 2020).
- Morimoto, Y.; Onoe, H.; Takeuchi, S. Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues. Sci. Robot. 2018, 3, eaat4440. [Google Scholar] [CrossRef]
- Russel, S.; Norvig, P. Artificial Intelligence: A Modern Approach, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Pfeifer, R.; Scheier, C. Understanding Intelligence; The MIT Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; The MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Pfeifer, R.; Iida, F. Embodied artificial intelligence: Trends and challenges. In Embodied Artificial Intelligence (International Seminar, Dagstuhl Castle, Germany, 2003); Springer: New York, NY, USA, 2003; pp. 1–26. [Google Scholar]
- Kawato Dynamic Brain Project. Available online: http://www.cns.atr.jp/erato/ (accessed on 4 April 2020).
- Imamizu, H.; Miyauchi, S.; Tamada, T.; Takino, R.; Puets, B.; Yoshioka, T.; Kawato, M. Human cerebellar activity reflecting an acquired internal model of a novel tool. Nature 2000, 403, 192–195. [Google Scholar] [CrossRef] [PubMed]
- Kawato, M. Internal models for motor control and trajectory planning. Curr. Opin. Neurobiol. 1999, 9, 718–727. [Google Scholar] [CrossRef]
- Schaal, S. Is imitation learning the route to humanoid robots? Trends Cogn. Sci. 1999, 3, 233–242. [Google Scholar] [CrossRef]
- Schroeder, M.R. Computer Speech: Recognition, Compression, Synthesis; Springer: New York, NY, USA, 2004. [Google Scholar] [CrossRef]
- Amazon Alexa. Available online: https://en.wikipedia.org/wiki/Amazon_Alexa (accessed on 16 May 2020).
- Siri. Available online: https://en.wikipedia.org/wiki/Siri (accessed on 16 May 2020).
- Cloud Text-to-Speech. Available online: https://cloud.google.com/text-to-speech (accessed on 16 May 2020).
- Potkonjak, V.; Tzafestas, S.; Radojicic, J.; Kostic, M. Modeling robot psycho-physical state and reactions—A new option in human-robot communication, part 1: Concept and background, part 2: Modeling and simulation. J. Intell. Robot. Syst. 2002, 35, 339–364. [Google Scholar] [CrossRef]
- Hiroshi Ishiguro Laboratories. Available online: http://www.geminoid.jp (accessed on 4 April 2020).
- Dolly (Sheep). Available online: https://en.wikipedia.org/wiki/Dolly_(sheep) (accessed on 4 April 2020).
- Campbell, K.H.; McWhir, J.; Ritchie, W.A.; Wilmut, I. Sheep cloned by nuclear transfer from a cultured cell line. Nature 1996, 380, 64–66. [Google Scholar] [CrossRef] [PubMed]
- Human Genome Project. Available online: https://en.wikipedia.org/wiki/Human_Genome_Project (accessed on 4 April 2020).
- International Human Genome Sequencing Consortium. Initial sequencing and analysis of the human genome. Nature 2001, 409, 860–921. [Google Scholar] [CrossRef]
- International Human Genome Sequencing Consortium. Finishing the euchromatic sequence of the human genome. Nature 2004, 431, 931–945. [Google Scholar] [CrossRef] [PubMed]
- Normile, D. Chinese Scientist Who Produced Genetically Altered Babies Sentenced to 3 Years in Jail. Science Magazine. 30 December 2019. Available online: https://www.sciencemag.org/news/2019/12/chinese-scientist-who-produced-genetically-altered-babies-sentenced-3-years-jail (accessed on 25 June 2020).
- Regalado, A. China’s Crispr Twins Might Have Had Their Brains Inadvertently Enhanced; Center for Genetics and Society: Berkeley, CA, USA; Available online: https://www.geneticsandsociety.org/article/chinas-crispr-twins-might-have-had-their-brains-inadvertently-enhanced (accessed on 25 June 2020).
- Pence, G.E. (Ed.) Flesh of My Flesh-The Ethics of Cloning Humans; Rowman & Littlefield: Lanham, MD, USA, 1998. [Google Scholar]
- Ayala, F.J. Cloning Humans? Biological, ethical, and social considerations. Proc. Natl. Acad. Sci. USA 2015, 112, 8879–8886. [Google Scholar] [CrossRef] [PubMed]
- Human Cloning. Available online: https://en.wikipedia.org/wiki/Human_cloning#Current_law (accessed on 14 May 2020).
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).