4.2.1. Skill Learning
As mentioned in
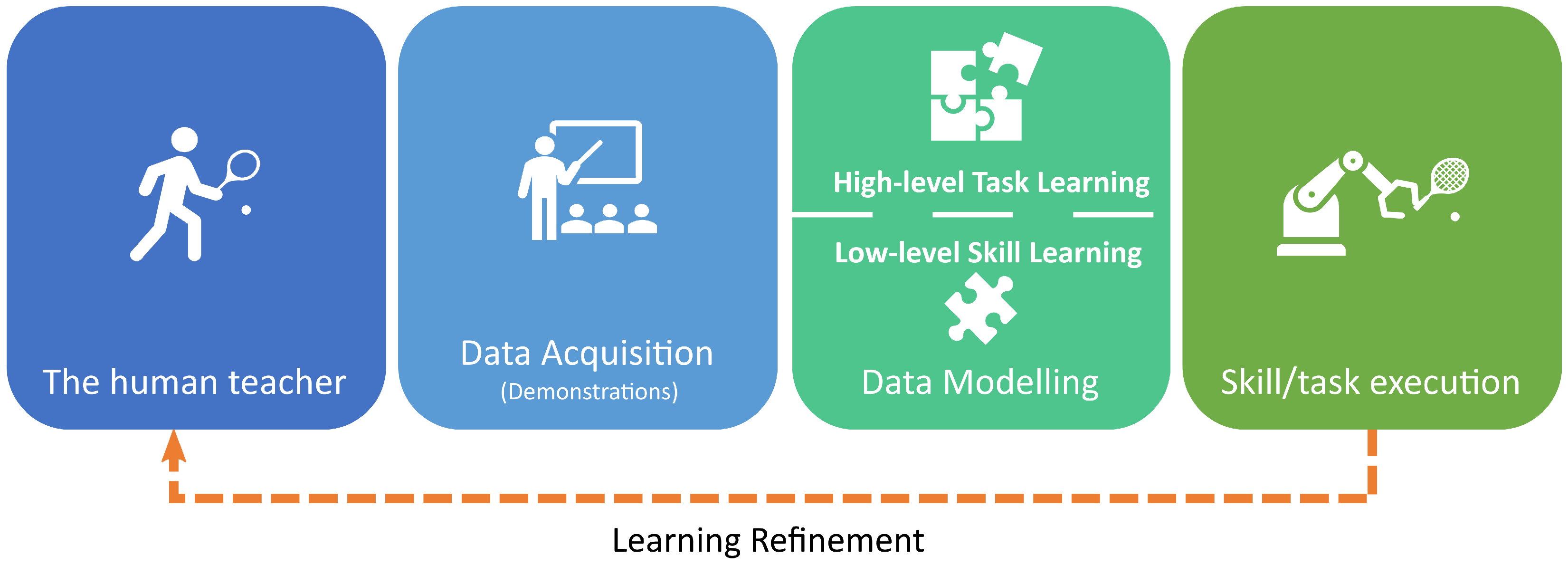
Section 3, the learning of low-level motions consists of teaching the robot individual movements, which include trajectories and interaction forces, from the demonstration. The most common learning methods are classified in deterministic and probabilistic approaches. Dynamic Movement Primitives (DMPs) is a nonlinear method used to generate multidimensional trajectories by the use of non-linear differential equations [
86]. In
Table 4, the literature based on deterministic methods for skill learning is presented. Here, it is possible to notice that DMPs is the predominant deterministic method used in the current literature. The method is considered to be deterministic because it only requires a single demonstration to encode the initial and goal states of a trajectory.
Simultaneous control of force and position for teaching and execution is physically impossible. To tackle this problem, Iturrate et al. [
60] proposed an adaptive controller architecture that can learn continuous kinematic and dynamic task constraint from a single demonstration. The task kinematics were encoded as DMPs, while the dynamics of the task were preserved by encoding the output of the normal estimator during demonstration as Radial Basis Functions (RBFs) synchronized with the DMPs. The demonstration is performed by the user using Kinaesthetic teaching enhanced with a variable-gain admittance control where the damping is continuously adapted based on a velocity–force rule in order to match the user’s intention and deduce the physical effort needed during teaching. The idea is to solve the gluing of electronic components to a PCB; their approach was evaluated on a 3D-printed replica of a PCB with the attached components.
Similarly, Wang et al. [
67] proposed a scheme where motion trajectories and contact force profiles are modeled simultaneously using DMPs to provide a comprehensive representation of human motor skills while the system complexity was kept low through the implementation of a momentum-based force observer, which allows the reproduction of the motion and force profiles without involving an additional force sensor. The demonstrations are performed using shadowing, which is a type of kineasthetic teaching in which instead of directly moving the robot, the actions to be taught are performed in an exact replica of the same robot in a master–slave control fashion. This was performed to avoid affecting the performance of the force observer. The learned skill consists of cleaning a table through a push action of small parts of the table similar to a sweeping movement.
Peternel et al. [
78] also combined DMPs with a hybrid force/impedance controller to govern the robot motion and force behavior but in a human–robot co-manipulation environment. This method enables the robot to adapt and modulate the delivered physical assistance as a function of human fatigue. The robot begins as a follower and imitates the human leader to facilitate the cooperative task execution while gradually learning the task parameters from the human. When the robot detects human fatigue, it takes control of the physically demanding aspects of the task while the human keeps control of the cognitively complex aspects. Additionally, the human fatigue is measured with electromyography (EMG) and modeled through a novel approach developed by the authors which was inspired by the dynamical response of an RC circuit. The proposed framework was tested on two collaborative skills, wood sawing, and surface polishing.
In contrast, Ghalamzan et al. [
57] propose a combination of deterministic and probabilistic techniques—DMP and GMM/GMR—to dynamically adapt the robot to environments with moving obstacles. In this work, they use the single-shot approach (DMP) to learn the desired motion trajectories in a pick-and-place task, this allows the robot to learn the task model and its constraints, assuming that the initial and the final location of the object to be manipulated are invariant with respect to time. Then, to include the constraints imposed by the environment, they apply multi-shot learning (GMM/GMR) to learn how to avoid static obstacles without deviating from the initial and final goals from the task using multiple demonstrations and obstacles positions. Finally, by generalizing the utility function developed for the task in a static environment, they can approach dynamic environments by using a Model Predictive Control (MPC) strategy. The object and obstacle detection is performed through computer vision, while the demonstrations of the desired task are taught using Kineasthetic teaching.
Liang et al. [
62] propose a framework that allows non-expert users to program robots using symbolic planning representations by teaching low-level skills. The framework uses DMPs to teach these atomic actions through demonstrations because DMPs generate trajectories based on the initial and final state of the demonstrated trajectory, this allows to generalize a demonstrated trajectory under the assumption that the learned trajectory is independent of the trajectory performed by the user. The framework also uses a visual perception system to recognize object and certain environment properties to learn high-level conditions to encode symbolic action models. Schlette et al. [
54] also exploit the capabilities of the DMPs that allow the reduction of the recorded trajectories to a few parameters that can be modulated to adapt to new situations during execution arising as a result of time independence and encoding of forces and torques in the desired trajectories. Both works were developed in semi-structured environments and the main goal of teaching low-level skills is to use them to solve more complex tasks. In [
62], an automated planner generates an action sequence to achieve the task goal, one of its main contributions is a retroactive loop that allows the user to refine the learned skills in case of ambiguities. The usability and simplicity of the framework were tested with the help of multiple users with favorable results. In [
54], a development was presented in a robotic assembly cell during the World Robot Challenge 2018 (WRC 2018) where operations such as pick and place, handling and screwing were evaluated.
In DMP formalism, a single model can be used to generate multiple trajectories using its spatial scaling property, but there are several drawbacks to this property in the original formulation [
87]. For example, if the scaling term is zero, or near to zero, the non-linear term cannot be learned or the trajectory generated could be very different from the original trajectory. Moreover, the non-linear forcing term usually is written in terms of Gaussian basis functions with different weights and the learning of the DMP model consists in determining each one of these weights. An issue, mentioned in Wu et al. [
69], within the parameters that constitute each of these basis functions is the need to be manually adjusted. The researchers propose the formulation of the non-linear forcing term in DMPs as a Gaussian Process (GP) to automatically optimize the hyper-parameters applying a sparse GP regression, and the spatial scaling is determined by a rotation matrix to solve the problem when the initial and the final positions are identical in some directions. This new formulation is used to teach a handover prediction skill to a robot where the main issue is that the handover location is unknown before the movement starts. Despite this, the formulation presented is capable of making online corrections based on human feedback using a gradient-type update law.
The main advantage of deterministic methods applied to LfD such as DMPs is that a trajectory can be learned from a single demonstration. Thus, the acquisition problem can be simplified, but in face of suboptimal or erroneous demonstrations or in cases where more than one teacher is required, this also means a great disadvantage because the reproduction step will lead to undesired behaviors; additionally, DMPs approaches model variables separately ignoring possible correlation between multiple variables, in terms of robot LfD this represents a drawback in systems where the relationship between motion and force is crucial. Probabilistic methods offer a solution to this kind of scenarios by incorporating variance and other stochastic metrics to the demonstrations in exchange of requiring multiple demonstrations during the learning process.
Table 5 enlists the works found in recent literature based probabilistic methods for skill learning.
A solution based on Movement Primitives is the Probabilistic Movement Primitives (ProMP) framework introduced in [
88] and extended in [
89]. The framework couples the joints of a robot using the covariance between trajectories of several degrees of freedom and regulates the movement by controlling the target velocities and positions in terms of a probability distribution. This method has been the precursor to other techniques such as Interaction ProMP, fully described in [
90], which models the correlation between movements of two different agents from joint demonstrated trajectories. Koert et al. in [
83,
91] proposed a framework to increasingly build a library of robot skills demonstrated by a human teacher called Mixture of Interaction ProMPs, which is an extension to Interaction ProMPs that allows to learn several different interaction patterns by applying Gaussian Mixture Models (GMM) to unlabeled demonstrations; it implements online learning of cooperative tasks by allowing to continuously integrate new training data by the means of new demonstrations. The demonstrations are recorded by Kineasthetic teaching for the robot and motion capture for the human trajectories, the framework was evaluated with the help of ten human subjects.
Fu et al. [
64] also combine ProMP and Interactive ProMP with GMM, but the focus is to solve the problem of multi-tasking in robots that solves multiple tasks (MTProMP), and multi-tasking in human–robot collaboration (MTiProMP). The proposed solution was tested on a Baxter robot in passing a set of via-points with MTProMP, but only one joint was considered. The same conditions are applied for testing the collaborative task, but in this case, a change in hand position represents the change in the behavioral intention of the user. Qian et al. [
84] extend the formulation behind Interactive ProMP to additionally incorporate immediate environment information, not only the observations of the human actor, but information about obstacles and other environmental changes are considered to proactively assist a human in collaborative tasks. The method was named Environment-adaptive Interactive ProMP (EIProMP) and the key to the model resides in assuming a regression relation between environmental parameters, such as the height and/or width of an obstacle, and a set of weight vectors obtained from the demonstration trajectories. This allows to encode an environment related weight vector to successfully add the environment parameters to the Interactive ProMP formulation. The taught skill was a handover skill for assisting in a push-button assembly task. Another probabilistic method based on DMP is the physical Human–Robot Interaction Primitives (pHRIP) proposed by Lai et al. [
47]. The method of pHRIP extends the Interaction Primitives (IP) introduced by Ben Amor et al. [
92] by integrating physical interaction forces. In the original IP formulation, a probabilistic approach and modeling of a distribution
over the parameters of the DMPs is used to predict future behaviors of the agent given a partial observed trajectory and to correlate its movements to those of an observed agent. In pHRIP, the parameter distribution
integrates the observed interaction forces in coupled human–robot dyads and by obtaining the predictive distribution of the DMP parameter set using the partial observations of the phase-aligned interactions, the robot is capable of matching its response to the user’s intent. A planar and Cartesian target reaching task was used to validate the efficacy of the proposed method with different users and the results show that with a small number of observations, the pHRIP can accurately infer the user intent and also adapt the robot to novel situations.
Similarly, in [
58], a handover skill was evaluated through an approach for collaborative robots to learn reactive and proactive behaviors from human demonstrations to solve a collaborative task. The approach is based on an Adaptive Duration Hidden Semi-Markov Model (ADHSMM) to allow the robot to react to different human dynamics, improving the collaboration with different users. In this approach, the duration of each state allows the robot to take the lead of a task when it is appropriate—namely, according to the task dynamics previously experienced in the demonstrations—which can be exploited to communicate its intention to the user.
Another work where a Hidden Semi-Markov Model (HSMM) is further used can be found in [
80] where a joint force controlled primitive is learned from multiple sensors to solve a pushing motion (over a stapler and soap dispenser). The approach is based on multi-modal information obtained from Kinaesthetic teaching, EMG signals measured from human, and a force sensor mounted between the flange and the end-effector of the robot. HSMM is used to model the demonstration data, to improve the robustness of the system against perturbations, and to model the distribution between position and stiffness. Finally, Gaussian Mixture Regression (GMR), which is a non-parametric regression approach used on functional data to help us in the modeling and prediction of a random variable [
36], is applied to generate the control variables for an impedance controller.
One of the most popular probabilistic methods applied to LfD of skill learning is the combination of GMM with GMR which extends the HMMs for action modeling, it was introduced by Calinon et al. [
93] and further extended in their later work [
94]. The method was applied in multiple works to learn some assembly-related skills [
49,
51,
55].
In literature, other techniques can be found focused on probabilistic methods, as demonstrated by Koskinopolou, et al. [
27], where the data acquisition of the demonstrated task was performed through markers on human body tracked with computer vision and an RGB-D camera, mapped the demonstrated data to the robot configuration space using Gaussian Process Latent Variable Model (GPLVM), which is a non-linear generalization of Principal Component Analysis (PCA), and it provided a probabilistic compact transformation of a given high-dimensional dataset to a low-dimensional one. Another approach based on Principal Component Analysis (PCA) can be found in Qu et al. [
28] for control of coordination in redundant dual-arm robots. PCA as a dimensionality reduction technique is used for removing uncorrelated data from human-arm demonstrations, then GMM are applied in order to extract human-like coordination characteristics by the Gaussian components, which are later generalized and reproduced through GMR. To finally obtain a human-like coordination motion equation for a dual-arm robot. The system was tested on carrying and a pouring task, the results show that more natural and smooth motions can be achieved in dual-arm robots through this method.
To address non-sequential HRC applications, Al-Yacoub et al. [
79] proposed to implement Weighted Random Forests (WRF) as a regression strategy to encode spatial data (such as force) in haptic applications, because this type of regression is robust against overfitting, allowing better generalization in varying conditions (e.g., different users and obstacles). In conventional Random Forest (RF) method, many decisions trees create an uncorrelated forest of trees where the final prediction is more accurate due to the contribution of each individual tree. The idea of weighting each tree based on their performance is to improve the overall performance of the algorithm on unseen test data, the solution proposed is a stochastic weighting approach where the trees are weighted according to their Root Mean Square Error (RMSE). The algorithm was tested on a co-manipulation skill for moving heavy objects between two points and a co-assembly task that involves a peg-in-hole assembly with demonstrations that involve human–human collaboration and human–robot collaboration scenarios comparing the RF approach to the proposed WRF method. The results showed that WRF improves performance over RF models because of the lower interaction forces and shorter execution times, also, the demonstrations based on human–human collaboration results in more human-like behavior and in less input force required.
De Coninck et al. [
52] developed a LfD system using Convolutional Neural Networks (CNNs) for robot grasping. The approach was called GraspNet architecture and it outputs an energy heat map which labels how well a region on the image frame works as the best grasp location and estimates the rotation angle of the desired object, using a single camera mounted on the wrist of the manipulator. Yet, some assumptions made during the experiments should be removed in the future for the sake of a better generalization.
4.2.2. Task Learning
On the other hand, high-level tasks are composed of multiple individual actions (low-level motions) to solve more complex task. We clustered the modeling techniques found in the analyzed papers based on the three classifications presented in
Section 3, which are Policy, Reward, and Semantic Learning. The objective of these modeling techniques is to learn a sequence of steps (actions) to follow given a particular state to solve the task (Policy Learning), learn what are the goals of a particular task and solve them based on this information (Reward Learning), or extract the most prominent characteristics of the task to solve it even if the environment or certain conditions change in the future (Semantic Learning).
In
Table 6, we present the papers focused only on high-level tasks and the techniques used for solving them. In the context of Semantic Learning, in Haage et al. [
68] the semantic representation of an assembly task is achieved through 2D and 3D visual information extraction form the demonstrations, and the semantic analysis of manipulation actions is performed using a graph-based approach. Finally, the task generation and execution is supported by a semantic robotic framework called Knowledge Integration Framework (KIF) to increase robustness and semantic compatibility. Schou et al. [
66] developed a software tool called Skill-Based System (SBS) for sequencing and parameterization of skills and tasks. Based on a predefined skill library which can be extended if needed, the operator can program a task selecting the sequence of skills desired and then kinaesthetically teach the parameters of the skill. This approach makes the robotic programming more intuitive and simple for non-expert users in industrial scenarios. Similarly, Steinmetz et al. [
53] use a Planning Domain Definition Language (PDDL) to parameterize user-defined skills in order to simplify the robot programming task to the user, while in Ramirez-Amaro et al. [
63], to learn the correlation between the robot movements and the environment information, a decision tree classifier is used to interpret the demonstrated activities, the obtained semantic representations are robust and invariant to different demonstration styles of the same activity. In Sun et al. [
70], the semantic extraction is performed through a dual-input Convolutional Neural Network (CNN) that incorporates not only the camera context (objects), but also the task context to collaboratively solve an assembly task.
An example of Policy Learning can be found in Winter et al. [
46], their proposed method is called Interactive Reinforcement Learning and Potential-Based Reward Shaping (IRL-PBRS), used to solve an assembly task. The method is based on Hierarchical Reinforcement Learning, but the main objective is that the human transfers their knowledge in the form of advice to speed up the RL learning agent. The idea is that the robot should find a valid assembly plan based on the information provided by the human through Natural Language Processing (NLP). The method is capable of learning quickly to keep up with the user-given advice and to adapt to changes in the given demonstrations. On the other hand, Wang et al. [
29] solve a customizable assembly with a method called Maximum Entropy Inverse Reinforcement Learning (MaxEnt-IRL). The idea behind this method is to calculate a reward function (Reward Learning) by learning from the user demonstrations to generate an optimal assembly policy according to the human instructions.
It is worth mentioning that most of the solutions described in this section are based on learning motion trajectories, but the interaction forces of the skill or task are often omitted. This leads to poor or underperforming skill or task reproduction, as demonstrated in [
80], where not only the robot forces are modeled, but also the human muscle activation; the results show that the robot is able to better generalize and smoothly reproduce the skill when the interaction forces seen during the demonstrations are modeled. Similar achievements are presented in [
67,
85] for pushing-like skills such as sweeping and peg-in-hole assemblies, the robot execution was proven to be better compared to only following the motion trajectory. Another example can be found in [
60], where the force modeling consideration not only produces better execution, but also helps during the demonstration phase to provide a better user experience during Kineasthetic teaching. Skill/task interaction force modeling is far more important in collaborative interactions between human and robots. This is because it allows a more ergonomic and simple co-manipulation [
56,
78], as well as safe and human-like interactions between human and robot [
47,
59,
79].






{kind=link}
{kind=link}