Determining Asymptotic Stability and Robustness of Networked Systems


Abstract
1. Introduction
2. Asymptotic Stability of Coupled Dynamical Systems
2.1. Unique Equilibrium Point
2.2. Multiple Equilibrium Points
2.3. Computational Implementation
2.3.1. Coupled Linear Systems
2.3.2. Coupled Nonlinear Systems
- Consider a rational function , , where and are polynomial functions. Then, if (9) is feasible with or with if .
- Ifthen if for all i, where are constants. This can be used to show that is nonnegative in a specific region of the state and/or parameter space.
- Finally, the computational time necessary to solve SOS decomposition problems scales badly with the size of the problem, as the length of vector is .
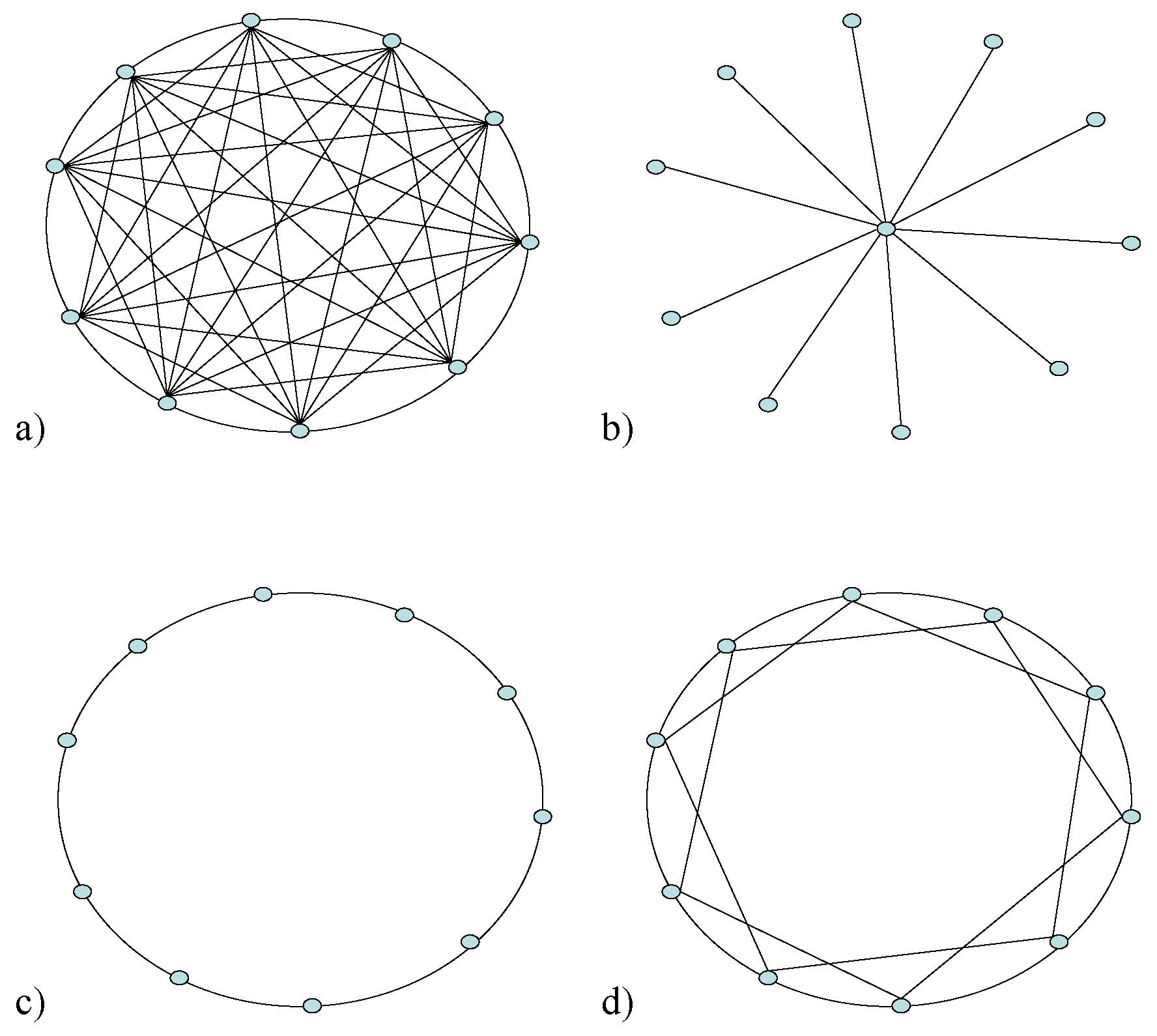
2.4. Different Coupling Configurations
- (a)
- All-to-all coupling (): .
- (b)
- Star-configuration: .
- (c)
- Ring of diffusively coupled systems: .
- (d)
- Ring of -nearest neighbour coupled systems [29]: if .
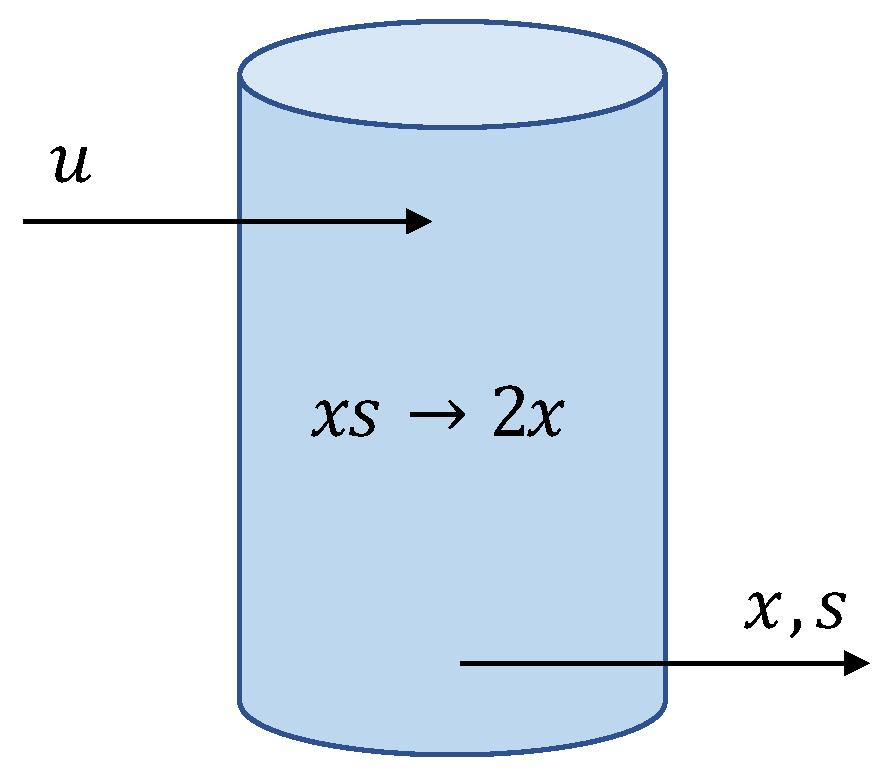
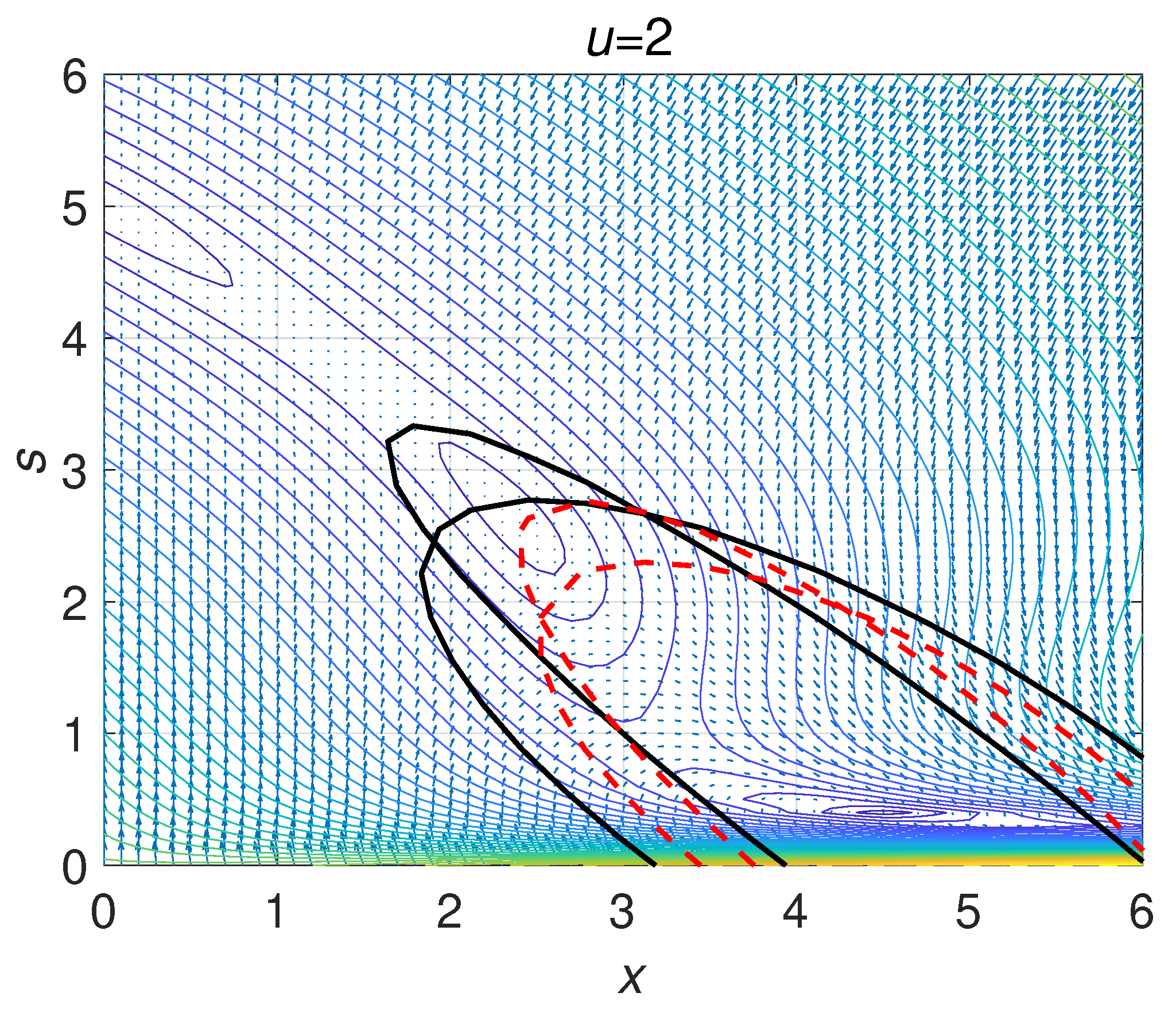
3. Coupled Continuous Stirred Tank Reactors
4. Discussion and Conclusions
Funding
Conflicts of Interest
Notation
| real numbers, real matrices | |
| th entry of matrix | |
| the identity matrix, | |
| transpose of matrix | |
| derivative of x with respect to time variable t | |
| , | matrix A is positive definite, matrix B is positive semidefinite |
| , | matrix A is negative definite, matrix B is negative semidefinite |
| , , | The Kronecker product: |
References
- Bulatov, Y.N.; Kryukov, A.V. A multi-agent control system of distributed generation plants. In Proceedings of the International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), St. Petersburg, Russia, 16–19 May 2017. [Google Scholar]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Ge, X.; Yang, F.; Han, Q.L. Distributed networked control systems: A brief overview. Inf. Sci. 2017, 380, 117–131. [Google Scholar] [CrossRef]
- Pajic, M.; Sundaram, S.; Pappas, G.J.; Mangharam, R. The wireless control network: A new approach for control over networks. IEEE Trans. Autom. Control 2011, 56, 2305–2318. [Google Scholar] [CrossRef]
- dos Santos, A.M.; Lopes, S.R.; Viana, R.L. Rhythm synchronization and chaotic modulation of coupled Van der Pol oscillators in a model for the heartbeat. Physica A 2004, 338, 335–355. [Google Scholar] [CrossRef]
- Vespignani, A. Twenty years of network science. Nature 2018, 558, 528–529. [Google Scholar] [CrossRef]
- Liu, Y.Y.; Slotine, J.J.; Barabási, A.L. Controllability of complex networks. Nature 2011, 473, 167–173. [Google Scholar] [CrossRef]
- Liu, Y.Y.; Barabási, A.L. Control principles of complex systems. Rev. Mod. Phys. 2016, 88, 035006. [Google Scholar] [CrossRef]
- Zanudo, J.G.T.; Yang, G.; Albert, R. Structure-based control of complex networks with nonlinear dynamics. Proc. Natl. Acad. Sci. USA 2017, 114, 7234–7239. [Google Scholar] [CrossRef]
- Leitold, D.; Vathy-Fogarassy, Á.; Abonyi, J. Controllability and observability in complex networks—The effect of connection types. Sci. Rep. 2017, 7, 151. [Google Scholar] [CrossRef]
- Prajna, S.; Jadbabaie, A.; Pappas, G. Stochastic Safety Verification Using Barrier Certificates. In Proceedings of the IEEE Conference on Decision and Control (CDC) (IEEE Cat. No.04CH37601), Nassau, Bahamas, 14–17 December 2005; pp. 929–934. [Google Scholar]
- Vandenberghe, L.; Boyd, S. Semidefinite programming. SIAM Rev. 1996, 38, 49–95. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- August, E. Using Noise for Model-Testing. J. Comput. Biol. A J. Comput. Mol. Cell Biol. 2012, 19, 968–977. [Google Scholar] [CrossRef]
- Wang, L.; Ames, A.; Egerstedt, M. Safety Barrier Certificates for Collisions-Free Multirobot Systems. IEEE Trans. Robot. 2017, 33, 661–674. [Google Scholar] [CrossRef]
- Li, M.; Shuai, Z. Global-stability problem for coupled systems of differential equations on networks. J. Differ. Equ. 2010, 248, 1–20. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2000. [Google Scholar]
- Feng, J.; Luan, X. Stability analysis for coupled systems with time-varying coupling structure. Adv. Differ. Equ. 2017, 2017, 191. [Google Scholar] [CrossRef]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Studies in Applied Mathematics. In Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994; Volume 15. [Google Scholar]
- Löfberg, J. YALMIP: A Toolbox for Modeling and Optimization in MATLAB. In Proceedings of the CACSD Conference, New Orleans, LA, USA, 2–4 September 2004. [Google Scholar]
- Löfberg, J. Automatic robust convex programming. Optim. Methods Softw. 2012, 27, 115–129. [Google Scholar] [CrossRef]
- Murty, K.G.; Kabadi, S.N. Some NP-complete problems in quadratic and nonlinear programming. Math. Program. 1987, 39, 117–129. [Google Scholar] [CrossRef]
- Parrilo, P.A. Semidefinite programming relaxations for semialgebraic problems. Math. Program. Ser. B 2003, 96, 293–320. [Google Scholar] [CrossRef]
- Papachristodoulou, A.; Anderson, J.; Valmorbida, G.; Prajna, S.; Seiler, P.; Parrilo, P.A. SOSTOOLS—Sum of Squares Optimization Toolbox, User’s Guide. 2018. Available online: http://sysos.eng.ox.ac.uk/sostools/ (accessed on 29 October 2020).
- Belykh, V.N.; Belykh, I.V.; Hasler, M. Connection graph stability method for synchronized coupled chaotic systems. Physica D 2004, 195, 159–187. [Google Scholar] [CrossRef]
- Miekkala, U. Graph properties for splitting with grounded laplacian matrices. BIT 1993, 33, 485–495. [Google Scholar] [CrossRef]
- Jadbabaie, A.; Motee, N.; Barahona, M. On the Stability of the Kuramoto Model of Coupled Nonlinear Oscillators. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; pp. 4296–4301. [Google Scholar]
- Thurston, H.S. On the Characteristic Equations of Products of Square Matrices. Am. Math. Mon. 1931, 38, 322–324. [Google Scholar] [CrossRef]
- Barahona, M.; Pecora, L.M. Synchronization in Small-World Systems. Phys. Rev. Lett. 2002, 89, 054101. [Google Scholar] [CrossRef]
- Chmiel, H. Bioprozesstechnik, 3rd ed.; Springer: Heidelberg, Germany, 2001. [Google Scholar]
- Haddad, W.M.; Chellaboina, V.; August, E. Stability and Dissipativity Theory for Nonnegative Dynamical Systems: A Thermodynamic Framework for Biological and Physiological Systems. In Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No.01CH37228), Orlando, FL, USA, 4–7 December 2001; pp. 442–458. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
August, E. Determining Asymptotic Stability and Robustness of Networked Systems. Systems 2020, 8, 39. https://doi.org/10.3390/systems8040039
August E. Determining Asymptotic Stability and Robustness of Networked Systems. Systems. 2020; 8(4):39. https://doi.org/10.3390/systems8040039
Chicago/Turabian StyleAugust, Elias. 2020. "Determining Asymptotic Stability and Robustness of Networked Systems" Systems 8, no. 4: 39. https://doi.org/10.3390/systems8040039
APA StyleAugust, E. (2020). Determining Asymptotic Stability and Robustness of Networked Systems. Systems, 8(4), 39. https://doi.org/10.3390/systems8040039