
Fractional-Step Method with Interpolation for Solving a System of First-Order 2D Hyperbolic Delay Differential Equations




Abstract
1. Introduction
2. Statement of Problem
3. Stability Analysis and Derivative Estimates
3.1. Maximum Principle
3.2. Derivative Bounds
3.3. Propagation of Discontinuities
4. The Fractional-Step Method
4.1. Temporal Discretization
4.2. The Fully Discrete Scheme
4.3. Discrete Stability Results
5. Error Analysis
6. The Variable Delay Problem
The Algorithm for Solving the Problem
- Define mesh points , , with step lengths , , , respectively.
- Assume for all
- Replace
- If , then .
- If and , then .
- Replace
- If , then.
- If and , then .
- Go to Step 3 with .
7. Numerical Examples
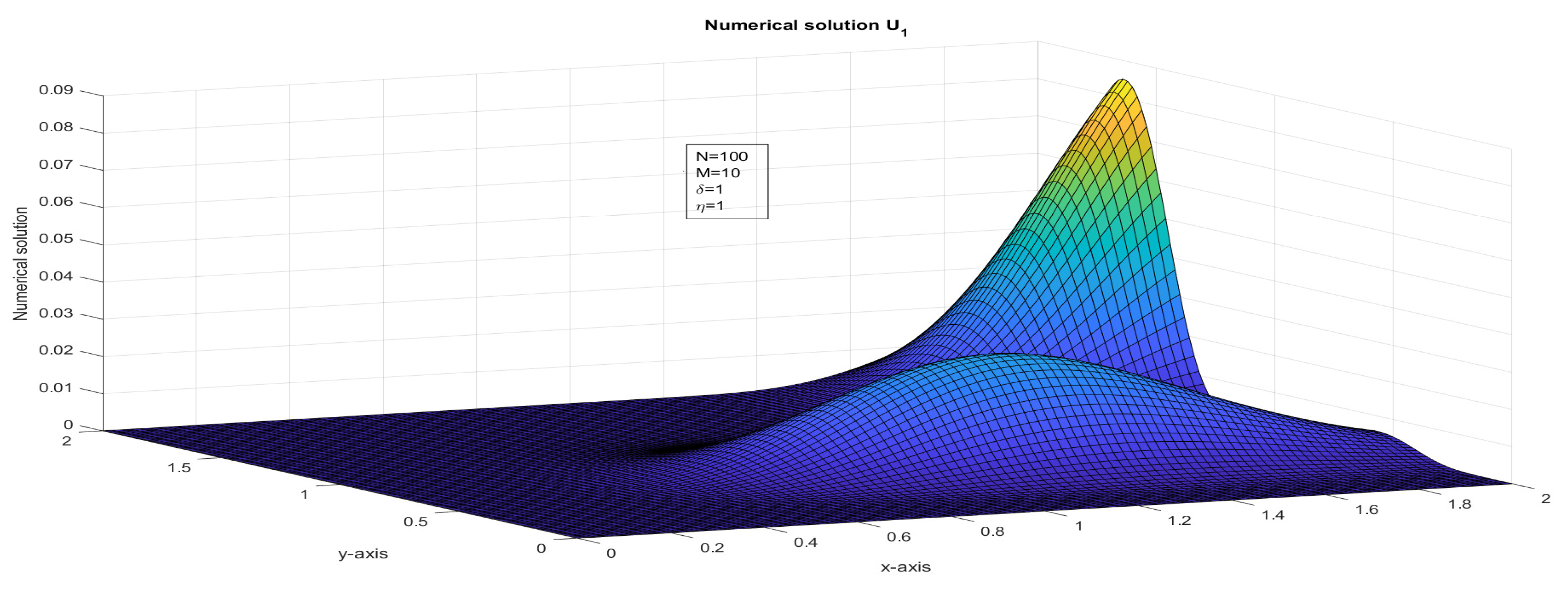
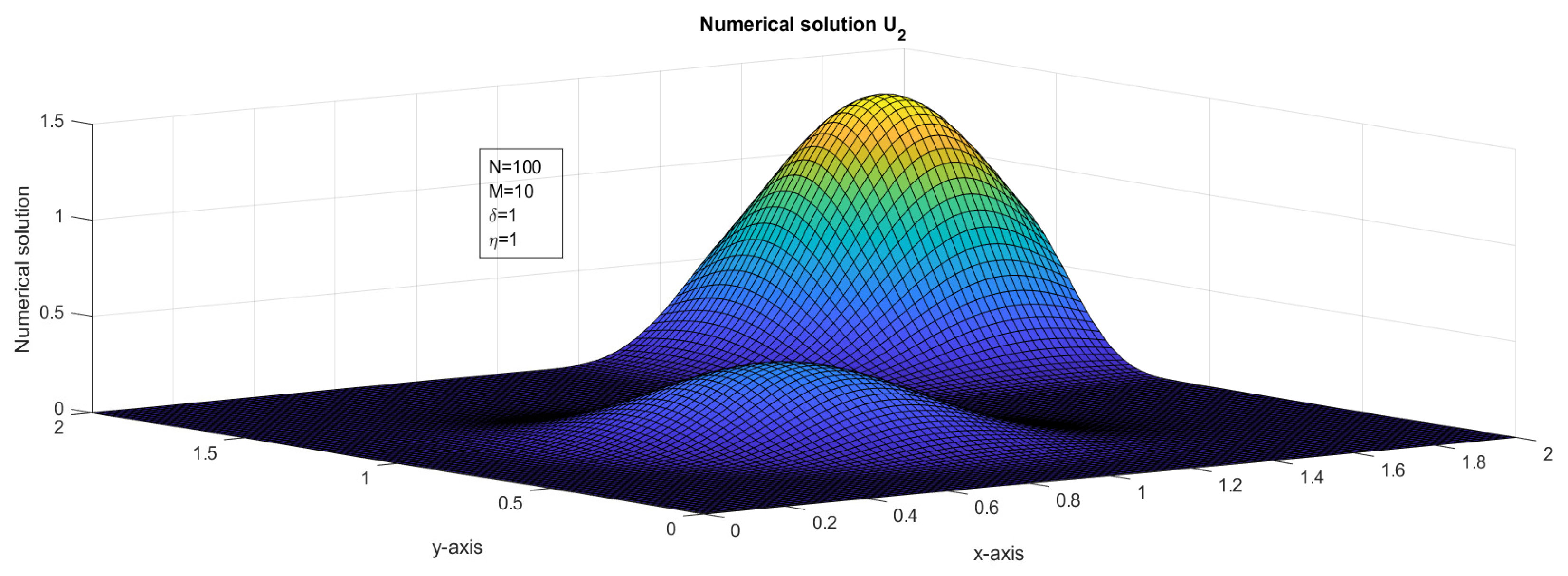
- Case 1:
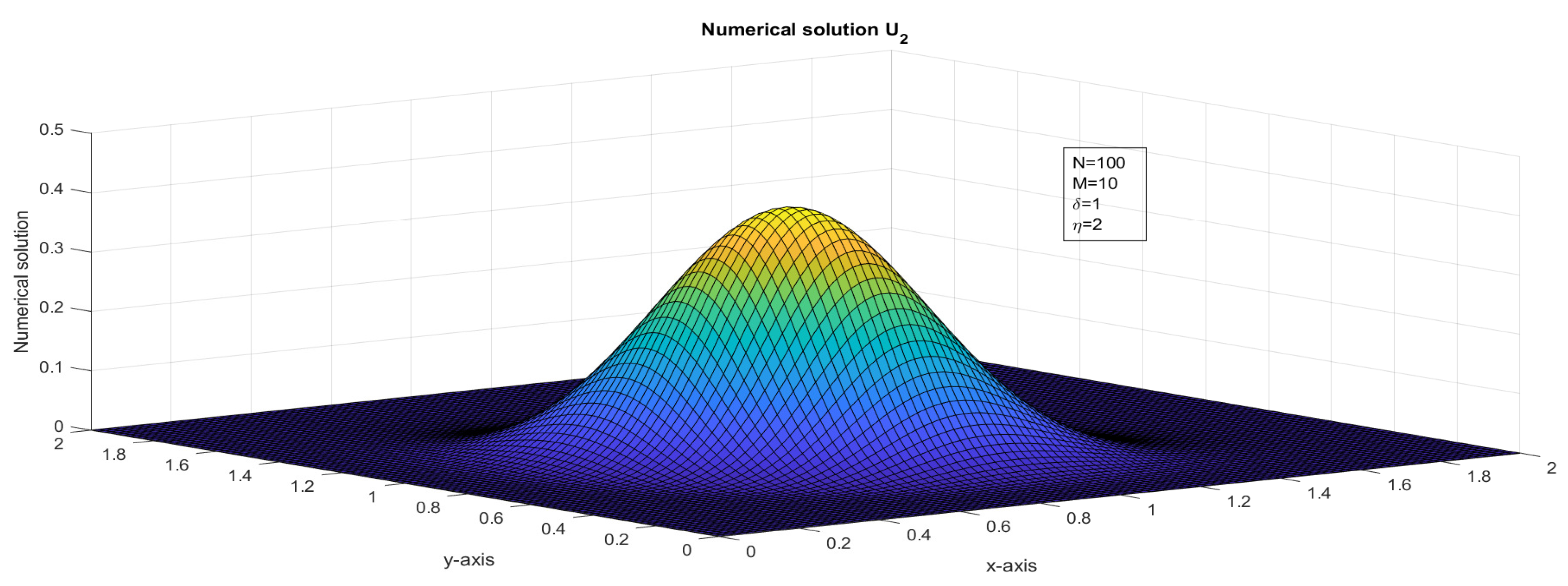
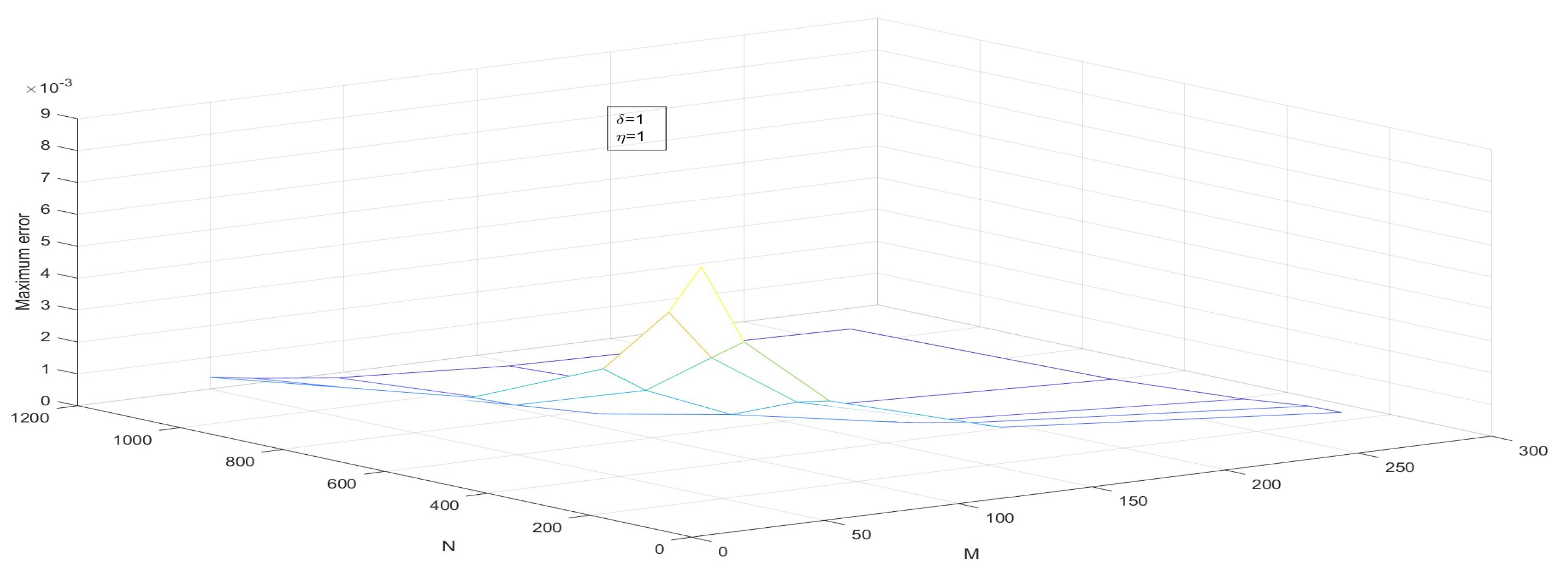
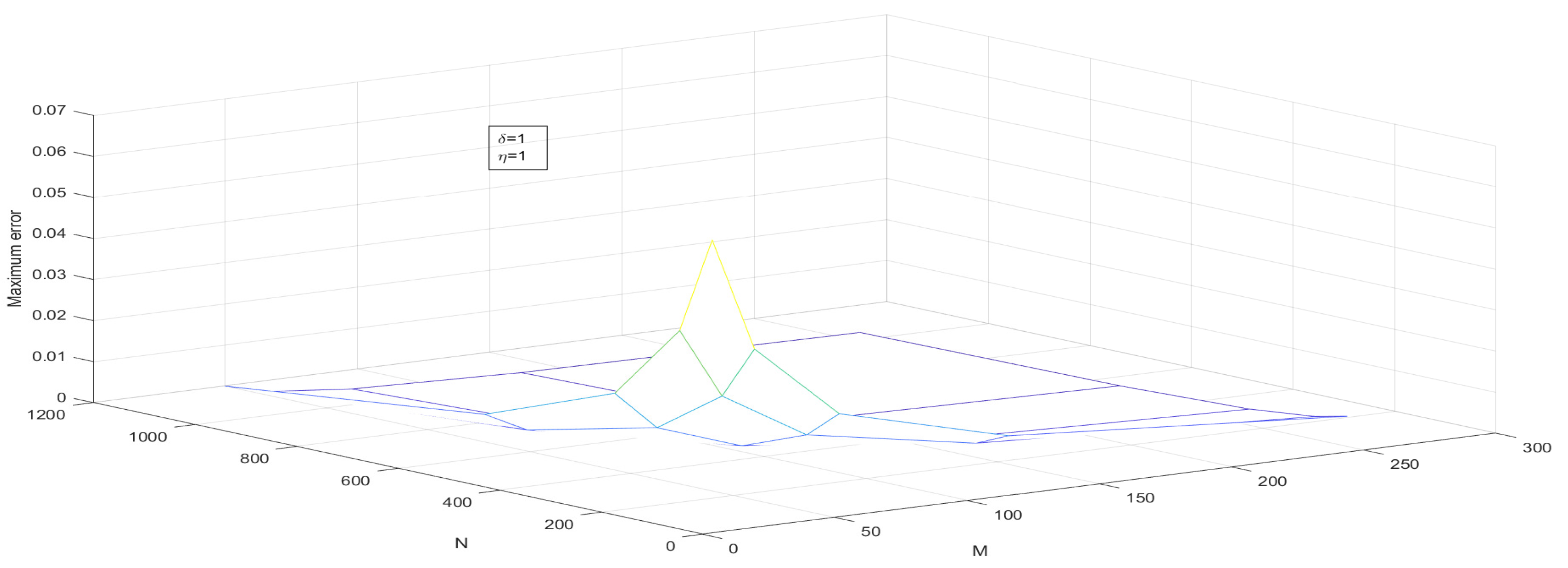
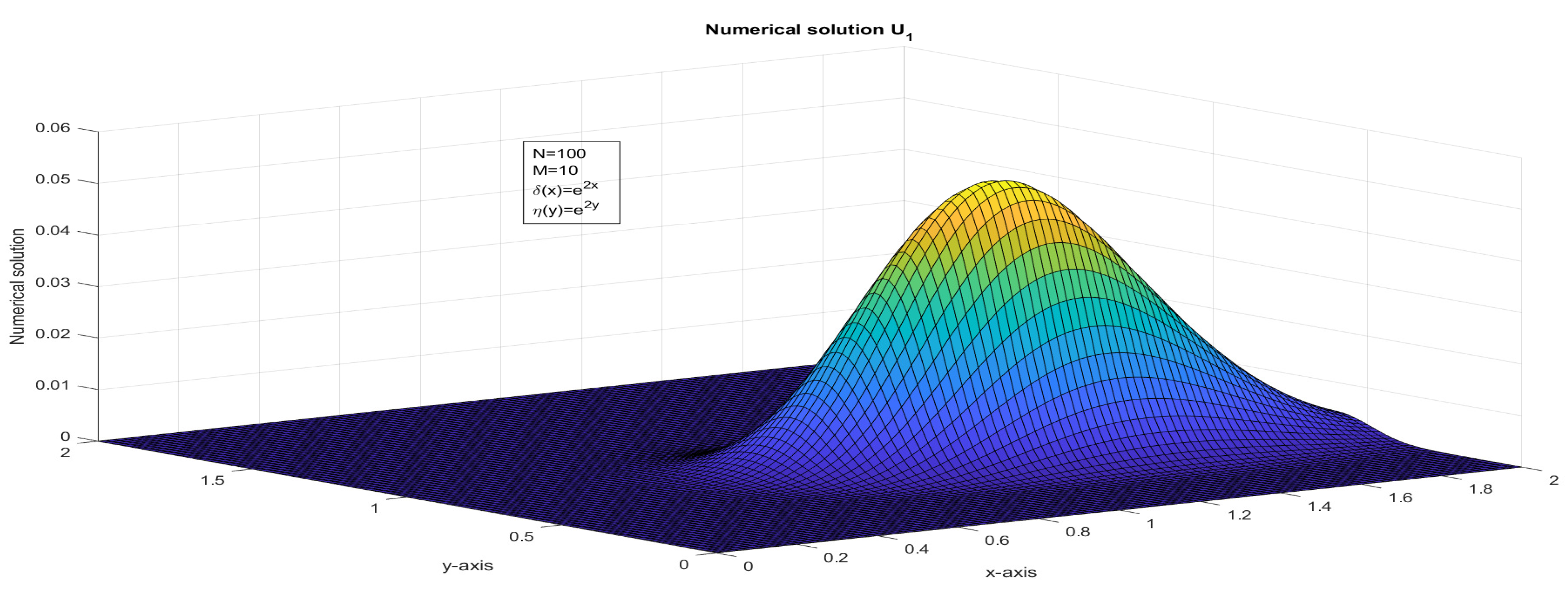
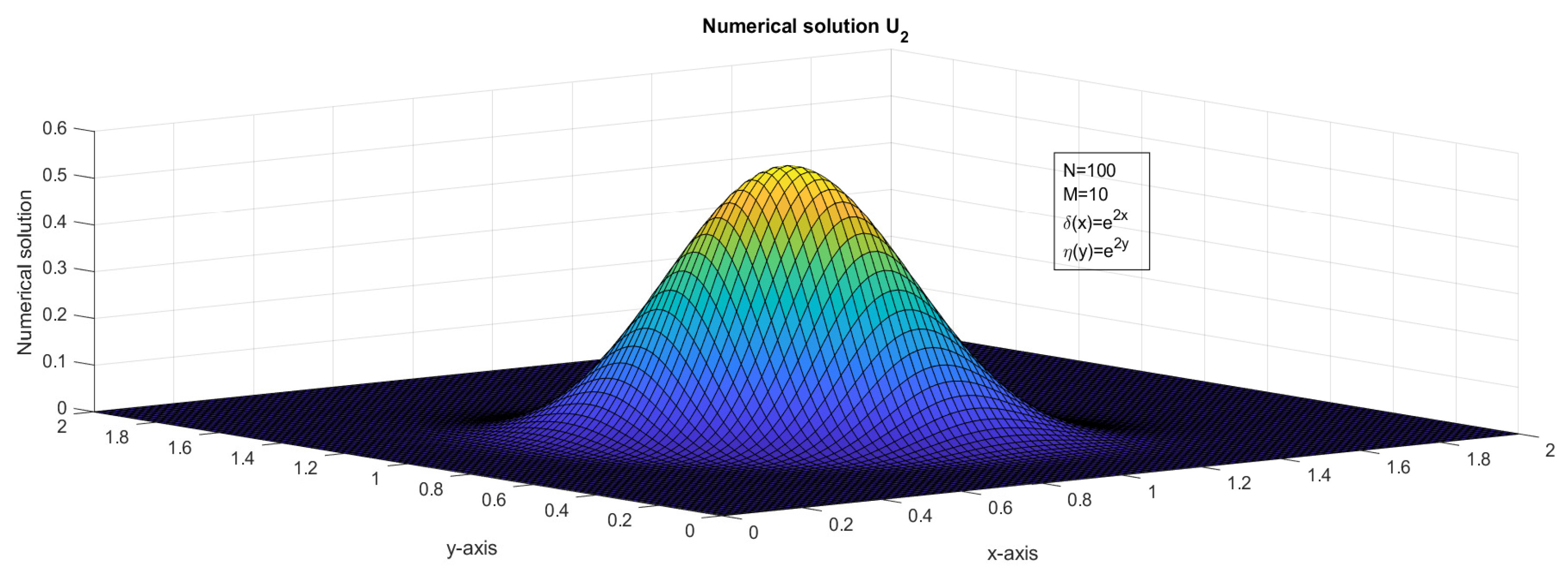
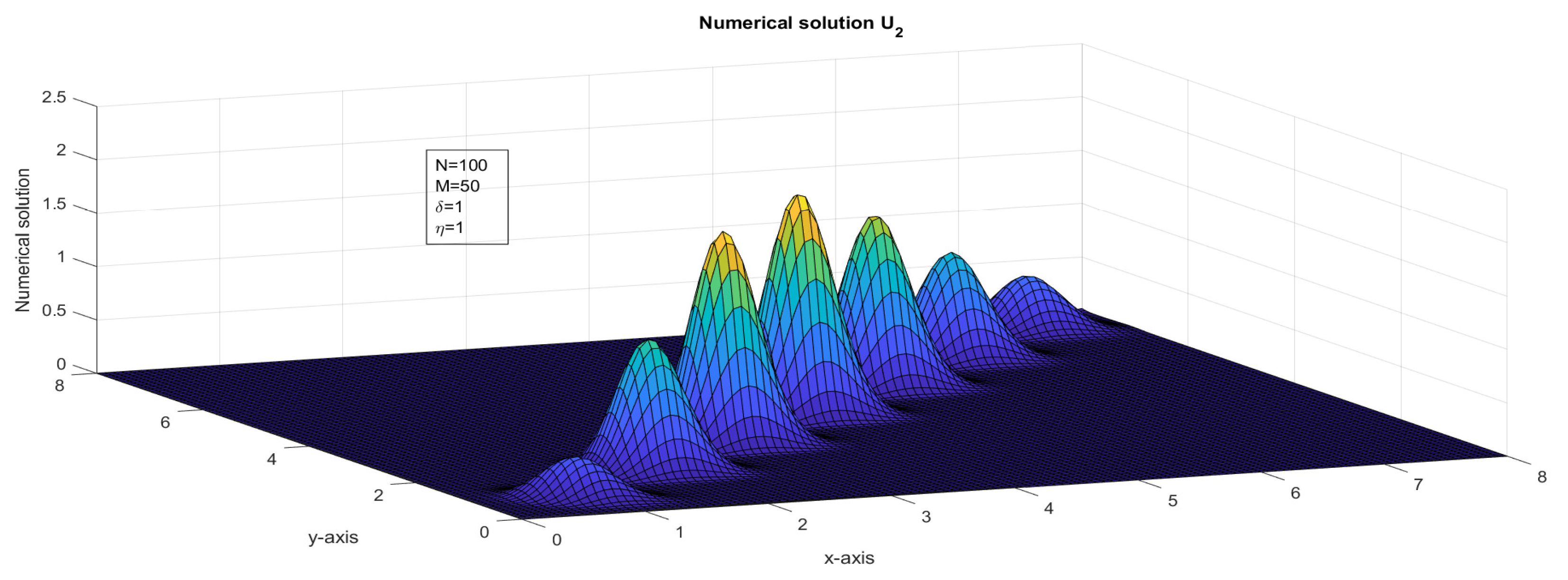
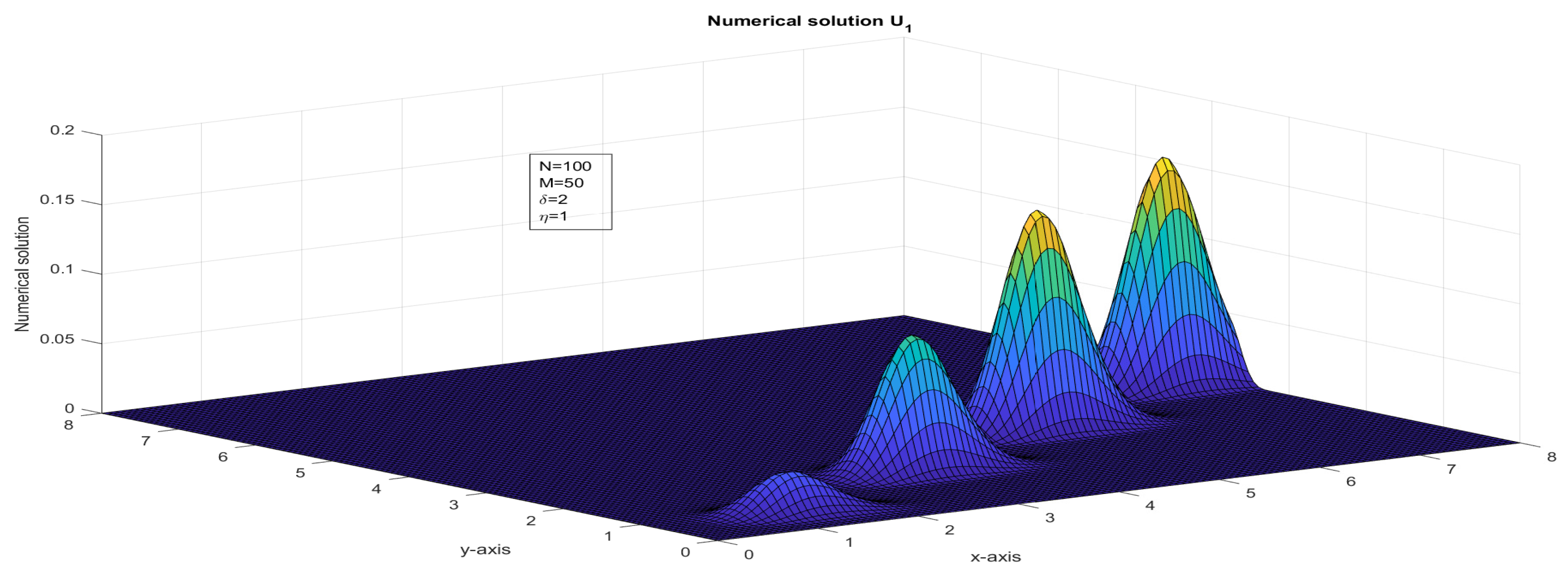
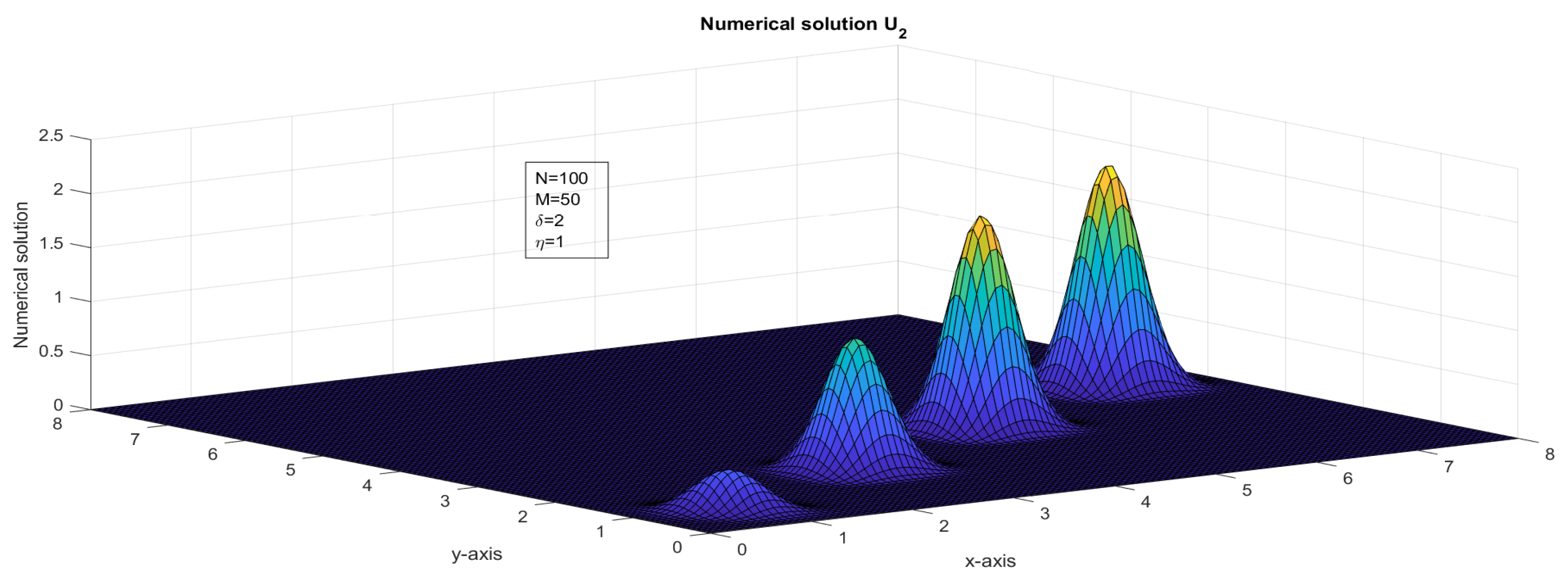
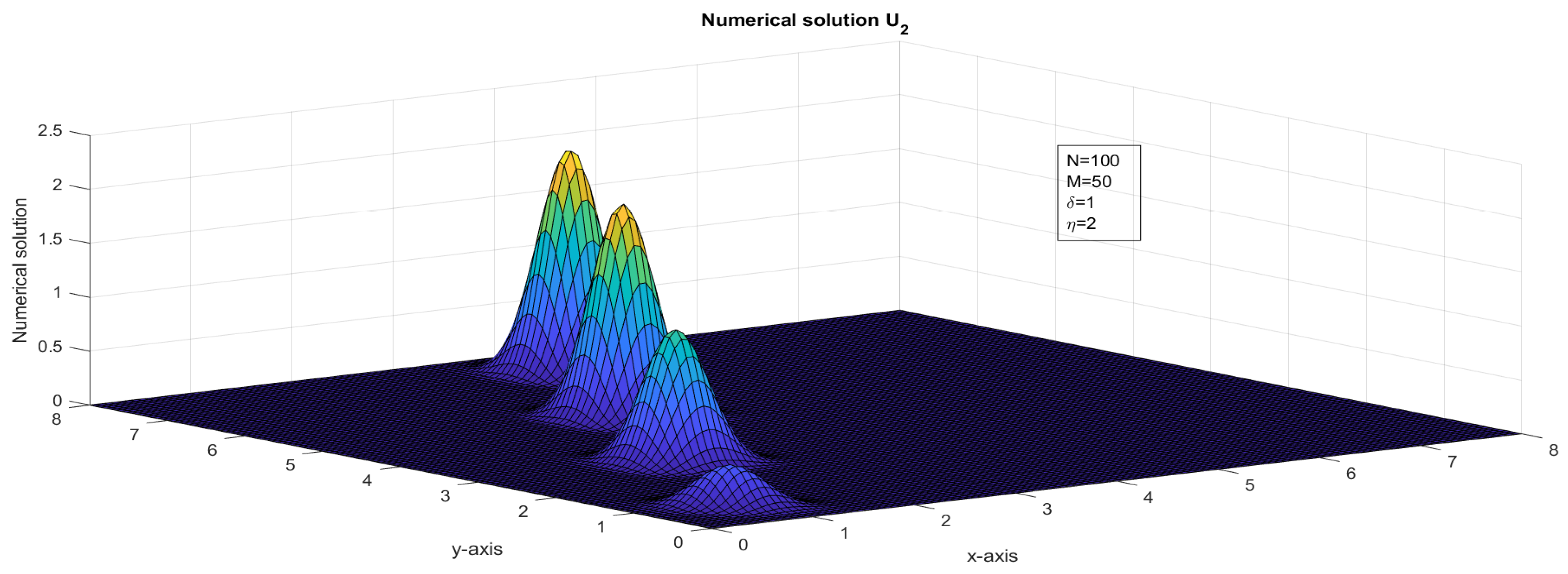
- Assume that . The two-dimensional impulse propagates in the solution due to the presence of the delay term. Numerical solutions are plotted in Figure 1 and Figure 2 and maximum point-wise errors are plotted in Figure 7 and Figure 8. The maximum point-wise errors are given in Table 1 and Table 2. The impulse moves in the forward direction can be found in Figure 11 and Figure 12.
- Case 2:
- Case 3:




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| , and N | ||||||
|---|---|---|---|---|---|---|
| M ↓ | 64 | 128 | 256 | 512 | 1024 | |
| 16 | 8.0922 × 10 | 6.4475 × 10 | 4.2323 × 10 | 2.4580 × 10 | 1.3300 × 10 | 8.0922 × 10 |
| 32 | 5.5672 × 10 | 4.8529 × 10 | 3.3899 × 10 | 2.0492 × 10 | 1.1329 × 10 | 5.5672 × 10 |
| 64 | 3.3803 × 10 | 3.1249 × 10 | 2.2935 × 10 | 1.4320 × 10 | 8.0661 × 10 | 3.3803 × 10 |
| 128 | 1.8814 × 10 | 1.7998 × 10 | 1.3716 × 10 | 8.7893 × 10 | 5.0466 × 10 | 1.8814 × 10 |
| 256 | 9.9549 × 10 | 9.7438 × 10 | 7.5796 × 10 | 4.9483 × 10 | 3.1548 × 10 | 9.9549 × 10 |
| 8.0922 × 10 | 6.4475 × 10 | 4.2323 × 10 | 2.4580 × 10 | 1.3300 × 10 | - | |



| , and N | ||||||
|---|---|---|---|---|---|---|
| M ↓ | 64 | 128 | 256 | 512 | 1024 | |
| 16 | 6.8702 × 10 | 4.4892 × 10 | 2.6181 × 10 | 1.4221 × 10 | 7.4248 × 10 | 6.8702 × 10 |
| 32 | 4.0786 × 10 | 2.7619 × 10 | 1.6487 × 10 | 9.0944 × 10 | 4.7898 × 10 | 4.0786 × 10 |
| 64 | 2.2413 × 10 | 1.5539 × 10 | 9.4426 × 10 | 5.2683 × 10 | 2.7922 × 10 | 2.2413 × 10 |
| 128 | 1.1778 × 10 | 8.2741 × 10 | 5.0898 × 10 | 2.8575 × 10 | 1.5196 × 10 | 1.1778 × 10 |
| 256 | 6.0411 × 10 | 4.2797 × 10 | 2.6459 × 10 | 1.4907 × 10 | 7.9392 × 10 | 6.0411 × 10 |
| 6.8702 × 10 | 4.4892 × 10 | 2.6181 × 10 | 1.4221 × 10 | 7.4248 × 10 | - | |










8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Alexander, V.R.; Wu, J. A non-local PDE model for population dynamics with state-selective delay: Local theory and global attractors. J. Comput. Appl. Math. 2006, 190, 99–113. [Google Scholar]
- Al-Mutib, A.N. Stability properties of numerical methods for solving delay differential equations. J. Comput. Appl. Math. 1984, 10, 71–79. [Google Scholar] [CrossRef]
- Bellen, A.; Zennaro, M. Numerical Methods for Delay Differential Equations; Oxford University Press: Oxford, UK, 2003. [Google Scholar]
- Wu, J. Theory and Applications of Partial Functional Differential Equations; Springer: New York, NY, USA, 1996. [Google Scholar]
- Karthick, S.; Mahendran, R.; Subburayan, V. Method of lines and Runge-Kutta method for solving delayed one dimensional transport equation. J. Math. Comput. Sci. 2023, 28, 270–280. [Google Scholar] [CrossRef]
- Tunç, O.; Tunç, C.; Wang, Y. Delay-dependent stability, integrability and boundedeness criteria for delay differential systems. Axioms 2021, 10, 138. [Google Scholar] [CrossRef]
- Tunç, O.; Tunç, C. Solution estimates to Caputo proportional fractional derivative delay integro-differential equations. Rev. Real Acad. Cienc. Exactas Fís. Nat. Ser. A Mat. 2023, 117, 12. [Google Scholar] [CrossRef]
- Stein, R.B. A theoretical analysis of neuronal variability. Biophys. J. 1965, 5, 173–194. [Google Scholar] [CrossRef]
- Stein, R.B. Some models of neuronal variability. Biophys. J. 1967, 7, 37–68. [Google Scholar] [CrossRef]
- Sharma, K.K.; Singh, P. Hyperbolic partial differential-difference equation in the mathematical modelling of neuronal firing and its numerical solution. Appl. Math. Comput. 2008, 201, 229–238. [Google Scholar]
- Singh, P.; Sharma, K.K. Finite difference approximations for the first-order hyperbolic partial differential equation with point-wise delay. Int. J. Pure Appl. Math. 2011, 67, 49–67. [Google Scholar]
- Singh, P.; Sharma, K.K. Numerical solution of first-order hyperbolic partial differential-difference equation with shift. Numer. Methods Partial Differ. Equ. 2010, 26, 107–116. [Google Scholar] [CrossRef]
- Karthick, S.; Subburayan, V. Finite Difference Methods with Interpolation for First-Order Hyperbolic Delay Differential Equations. Springer Proc. Math. Stat. 2021, 368, 147–161. [Google Scholar]
- Karthick, S.; Subburayan, V. Finite difference methods with linear interpolation for solving a coupled system of hyperbolic delay differential equations. Int. J. Math. Model. Numer. Optim 2022, 12, 370–389. [Google Scholar] [CrossRef]
- Karthick, S.; Subburayan, V.; Agrwal, R.P. Stable Difference Schemes with Interpolation for Delayed One-Dimensional Transport Equation. Symmetry 2022, 14, 1046. [Google Scholar]
- Fridmana, E.; Orlov, Y. Exponential stability of linear distributed parameter systems with time-varying delays. Automatica 2009, 45, 194–201. [Google Scholar] [CrossRef]
- Smith, G.D. Numerical Solution of Partial Differential Equations: Finite Difference Methods; Oxford University Press: Oxford, UK, 1985. [Google Scholar]
- Strikwerda, J.C. Finite Difference Schemes and Partial Differential Equations; SIAM: Philadelphia, PA, USA, 2004. [Google Scholar]
- Islam, S.; Alam, M.; Al-Asad, M.; Tunç, C. An analytical technique for solving new computational of the modified Zakharov-Kuznetsov equation arising in electrical engineering. J. Appl. Comput. Mech. 2021, 7, 715–726. [Google Scholar]
- Alam, M.N.; Tunc, C. An analytical method for solving exact solutions of the nonlinear Bogoyavlenskii equation and the nonlinear diffusive predator–prey system. Alex. Eng. J. 2016, 55, 1855–1865. [Google Scholar] [CrossRef]
- Jiwari, R. Lagrange interpolation and modified cubic B-spline differential quadrature methods for solving hyperbolic partial differential equations with Dirichlet and Neumann boundary conditions. Comput. Phys. Commun. 2015, 193, 55–65. [Google Scholar] [CrossRef]
- Jiwari, R.; Pandit, S.; Mittal, R. A differential quadrature algorithm to solve the two dimensional linear hyperbolic telegraph equation with Dirichlet and Neumann boundary conditions. Appl. Math. Comput. 2012, 218, 7279–7294. [Google Scholar] [CrossRef]
- Pandit, S.; Kumar, M.; Tiwari, S. Numerical simulation of second-order one dimensional hyperbolic telegraph equation. Comput. Phys. Commun. 2015, 187, 83–90. [Google Scholar] [CrossRef]
- Protter, M.H.; Weinberger, H.F. Maximum Principles in Differential Equations; Springer Science and Business Media: New York, NY, USA, 2012. [Google Scholar]
- Mizohata, S.; Murthy, M.V.; Singbal, B.V. Lectures on Cauchy Problem; Tata Institute of Fundamental Research: Bombay, India, 1965; Volume 35. [Google Scholar]
- Peaceman, D.W.; Rachford, H.H. The numerical solution of parabolic and elliptic differential equations. SIAM J. Comput. 1955, 3, 28–41. [Google Scholar] [CrossRef]
- Thomas, B.G.; Samarasekera, I.V.; Brimacombe, J.K. Comparison of numerical modeling techniques for complex, two-dimensional, transient heat-conduction problems. Metall. Trans. B 1984, 15, 307–318. [Google Scholar] [CrossRef]
- Araújo, A.; Neves, C.; Sousa, E. An alternating direction implicit method for a second-order hyperbolic diffusion equation with convection. Appl. Math. Comput. 2014, 239, 17–28. [Google Scholar] [CrossRef]
- Clavero, C.; Jorge, J.C.; Lisbona, F. A uniformly convergent scheme on a nonuniform mesh for convection–diffusion parabolic problems. J. Comput. Appl. Math. 2003, 154, 415–429. [Google Scholar] [CrossRef]
- Clavero, C.; Jorge, J.C.; Lisbona, F.; Shishkin, G.I. An alternating direction scheme on a nonuniform mesh for reaction-diffusion parabolic problems. IMA J. Numer. Anal. 2000, 20, 263–280. [Google Scholar] [CrossRef]
- Majumdar, A.; Natesan, S. Alternating direction numerical scheme for singularly perturbed 2D degenerate parabolic convection-diffusion problems. Appl. Math. Comput. 2017, 313, 453–473. [Google Scholar] [CrossRef]
- Avudai Selvi, P.; Ramanujam, N. A parameter uniform difference scheme for singularly perturbed parabolic delay differential equation with Robin type boundary condition. Appl. Math. Comput. 2017, 296, 101–115. [Google Scholar] [CrossRef]
- Subburayan, V.; Ramanujam, N. An asymptotic numerical method for singularly perturbed convection-diffusion problems with a negative shift. Neural Parallel Sci. Comput. 2013, 21, 431–446. [Google Scholar]
- Walter, A. Strauss, Partial Differential Equations an Introduction; John Wiley & Sons, Inc.: New York, NY, USA, 2008. [Google Scholar]
- Subburayan, V.; Natesan, S. Parameter Uniform Numerical Method for Singularly Perturbed 2D Parabolic PDE with Shift in Space. Mathematics 2022, 10, 3310. [Google Scholar] [CrossRef]
- Zadorin, A.I. Approaches to constructing two-dimensional interpolation formulas in the presence of boundary layers. J. Phys. Conf. Ser. 2022, 2182, 012036. [Google Scholar] [CrossRef]
- Miller, J.J.H.; O’Riordan, E.; Shishkin, G.I. Fitted Numerical Methods for Singular Perturbation Problems: Error Estimates in the Maximum Norm for Linear Problems in One and Two Dimensions; World Scientific: Singapore, 2012. [Google Scholar]
- Varah, J.M. A lower bound for the smallest singular value of a matrix. Linear Algebra Its Appl. 1975, 11, 3–5. [Google Scholar] [CrossRef]
- Agarwal, R.P.; Chow, Y.M. Finite-difference methods for boundary-value problems of differential equations with deviating arguments. Comput. Method. Appl. Math. 1986, 12, 1143–1153. [Google Scholar] [CrossRef]
- Jain, R.K.; Agarwal, R.P. Finite difference method for second order functional differential equations. J. Math. Phys. Sci. 1973, 7, 301–316. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sampath, K.; Veerasamy, S.; Agarwal, R.P. Fractional-Step Method with Interpolation for Solving a System of First-Order 2D Hyperbolic Delay Differential Equations. Computation 2023, 11, 57. https://doi.org/10.3390/computation11030057
Sampath K, Veerasamy S, Agarwal RP. Fractional-Step Method with Interpolation for Solving a System of First-Order 2D Hyperbolic Delay Differential Equations. Computation. 2023; 11(3):57. https://doi.org/10.3390/computation11030057
Chicago/Turabian StyleSampath, Karthick, Subburayan Veerasamy, and Ravi P. Agarwal. 2023. "Fractional-Step Method with Interpolation for Solving a System of First-Order 2D Hyperbolic Delay Differential Equations" Computation 11, no. 3: 57. https://doi.org/10.3390/computation11030057
APA StyleSampath, K., Veerasamy, S., & Agarwal, R. P. (2023). Fractional-Step Method with Interpolation for Solving a System of First-Order 2D Hyperbolic Delay Differential Equations. Computation, 11(3), 57. https://doi.org/10.3390/computation11030057