Automatic Detection of Trawl-Marks in Sidescan Sonar Images through Spatial Domain Filtering, Employing Haar-Like Features and Morphological Operations

 ,
,  ,
, 

Abstract
1. Introduction
2. Materials and Methods
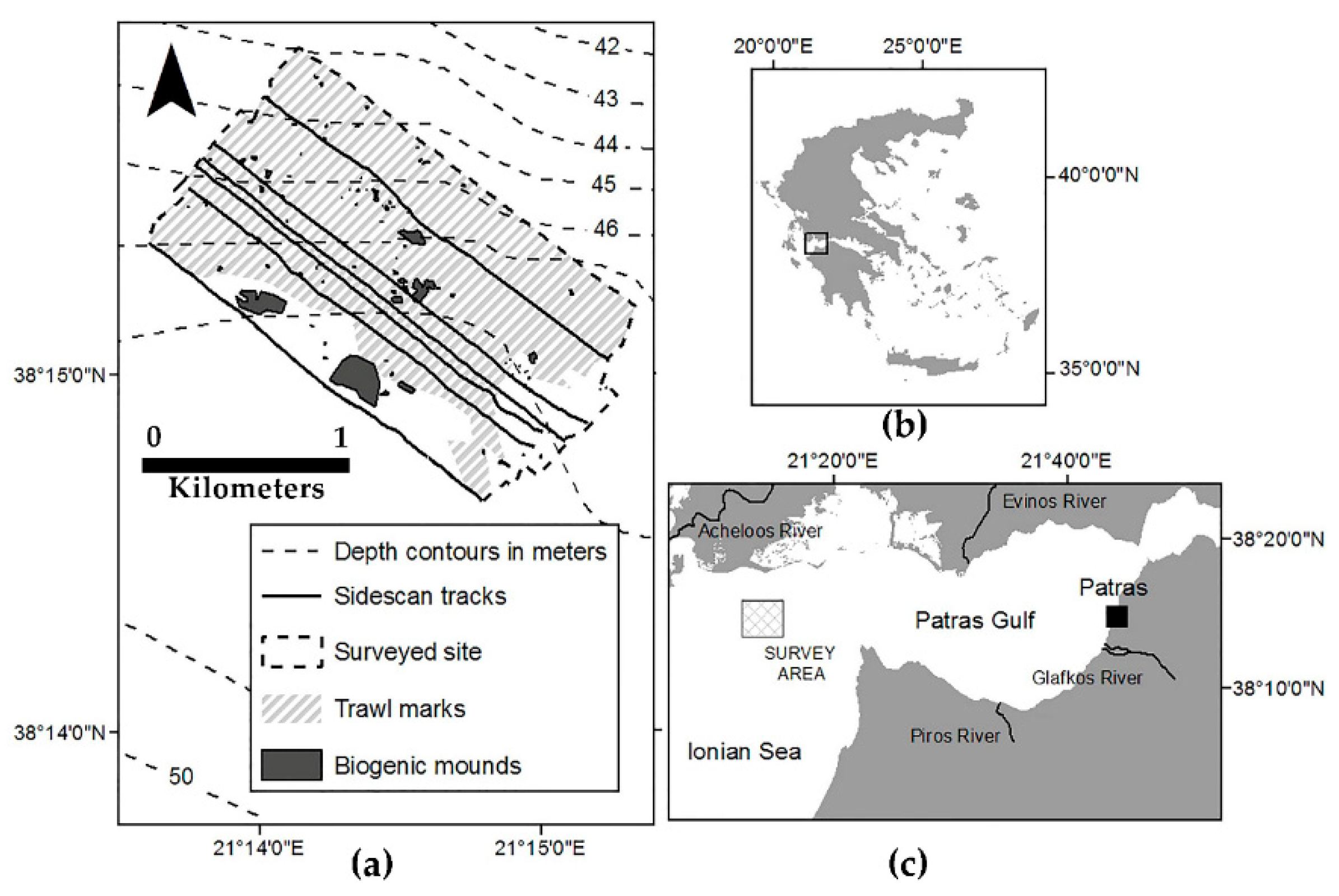
2.1. Study Area
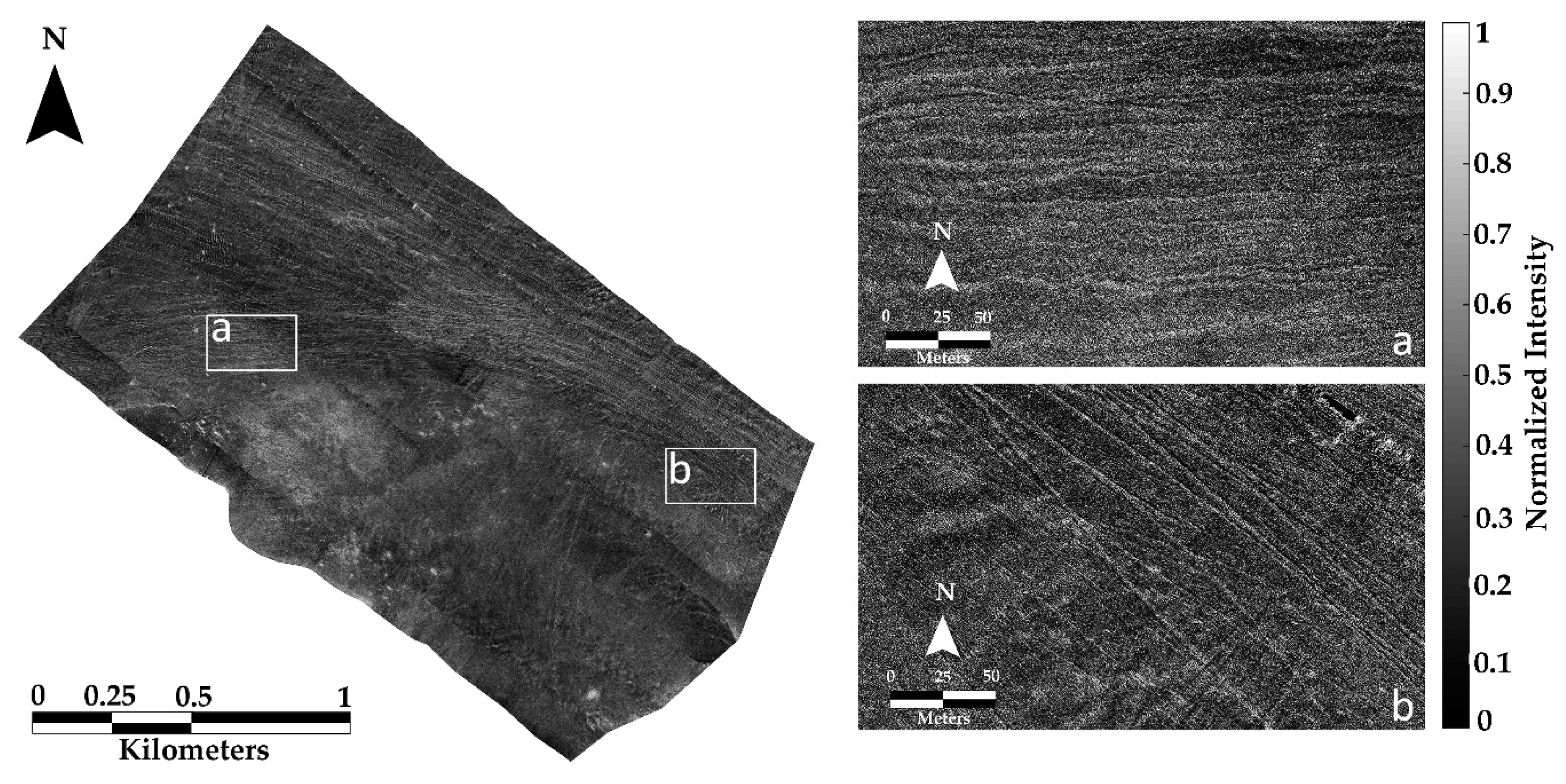
2.2. Data Acquisition and Processing
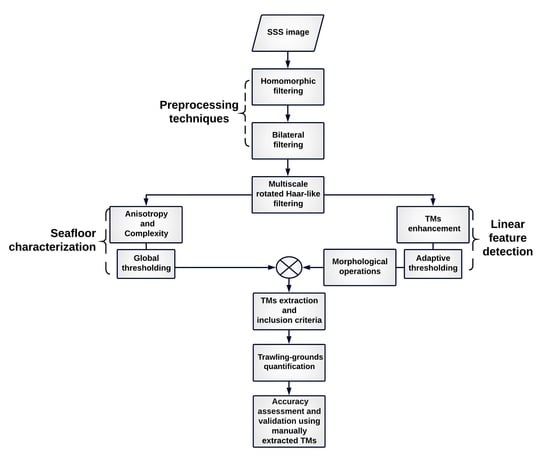
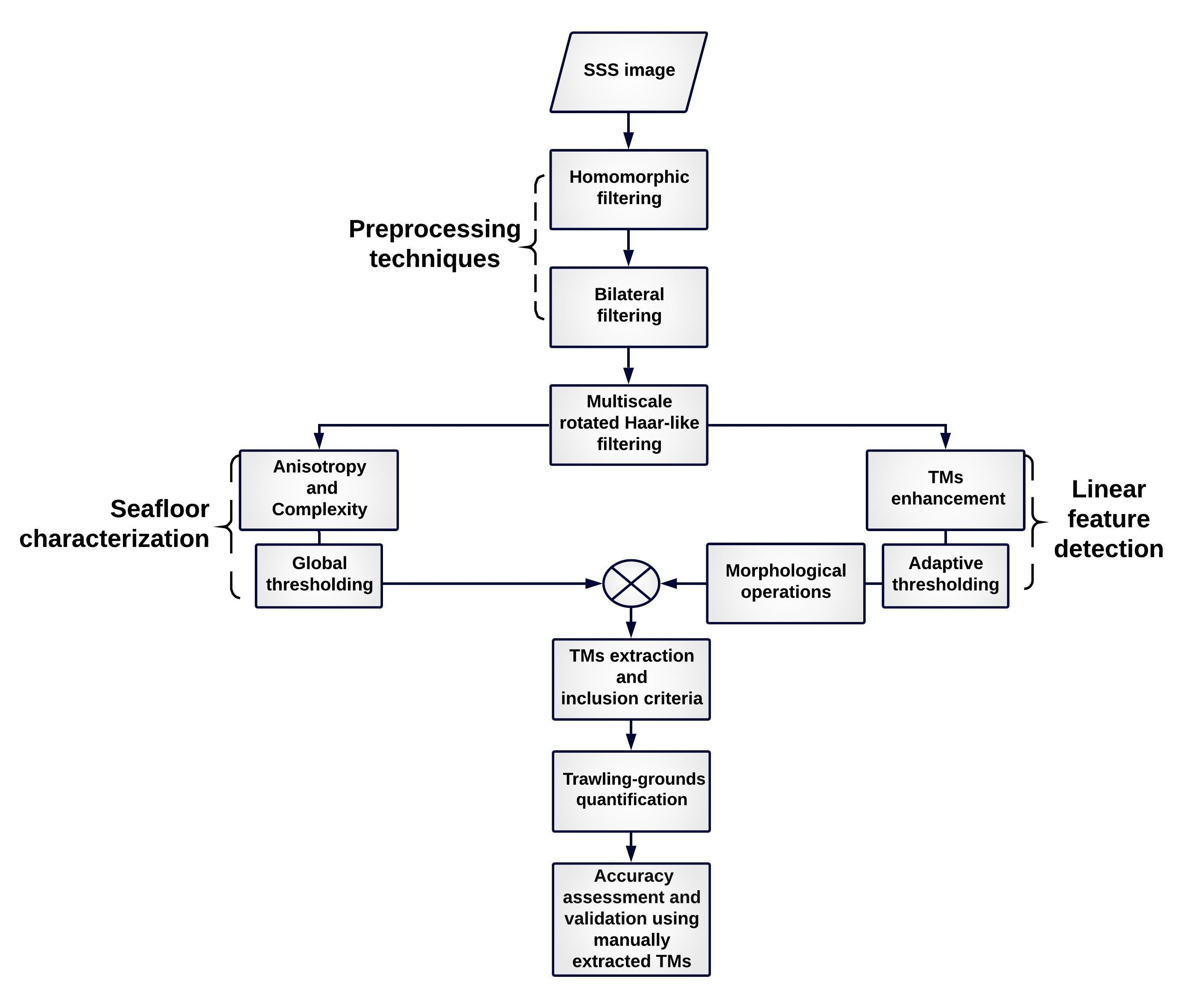
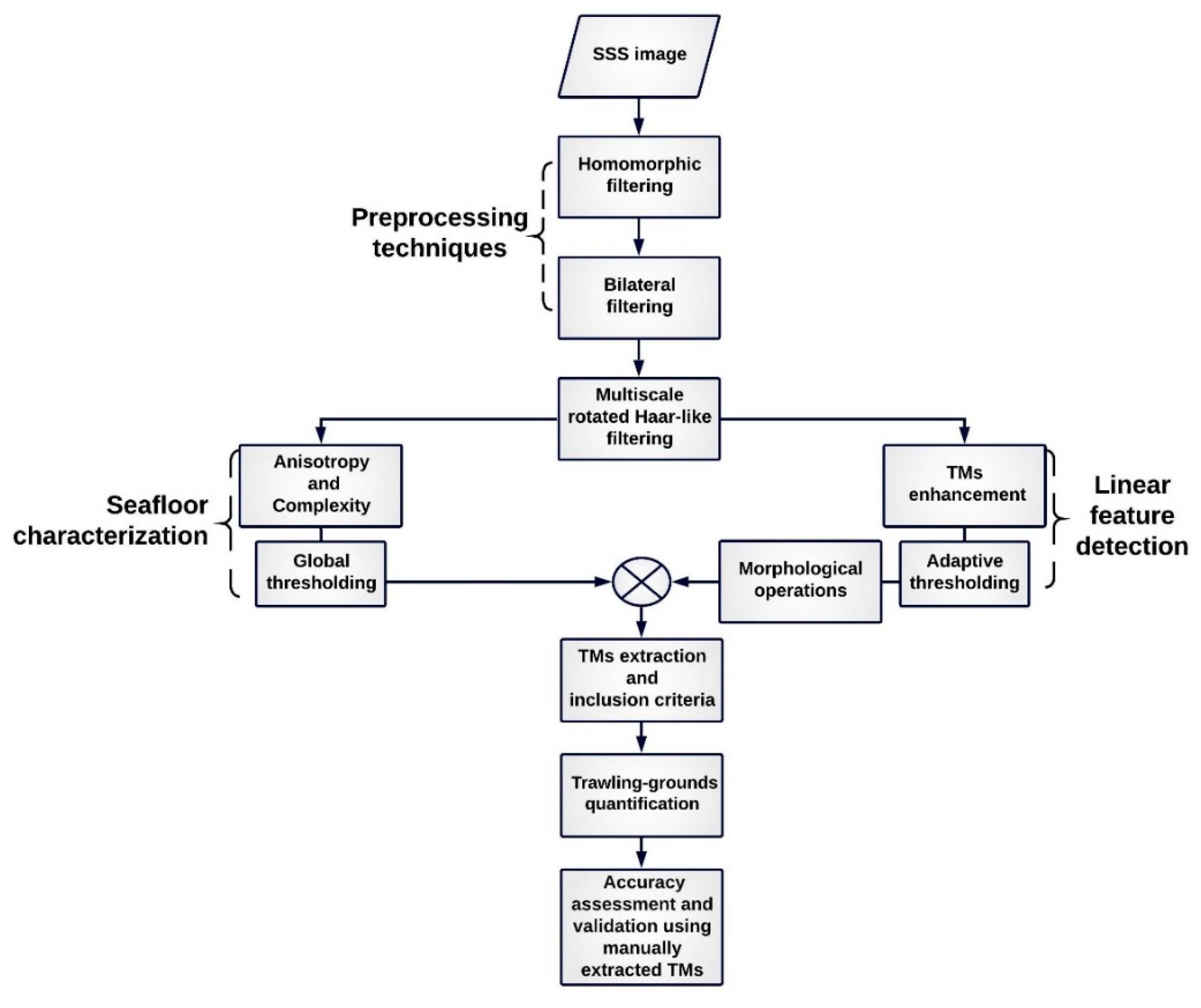
3. Methodology Overview
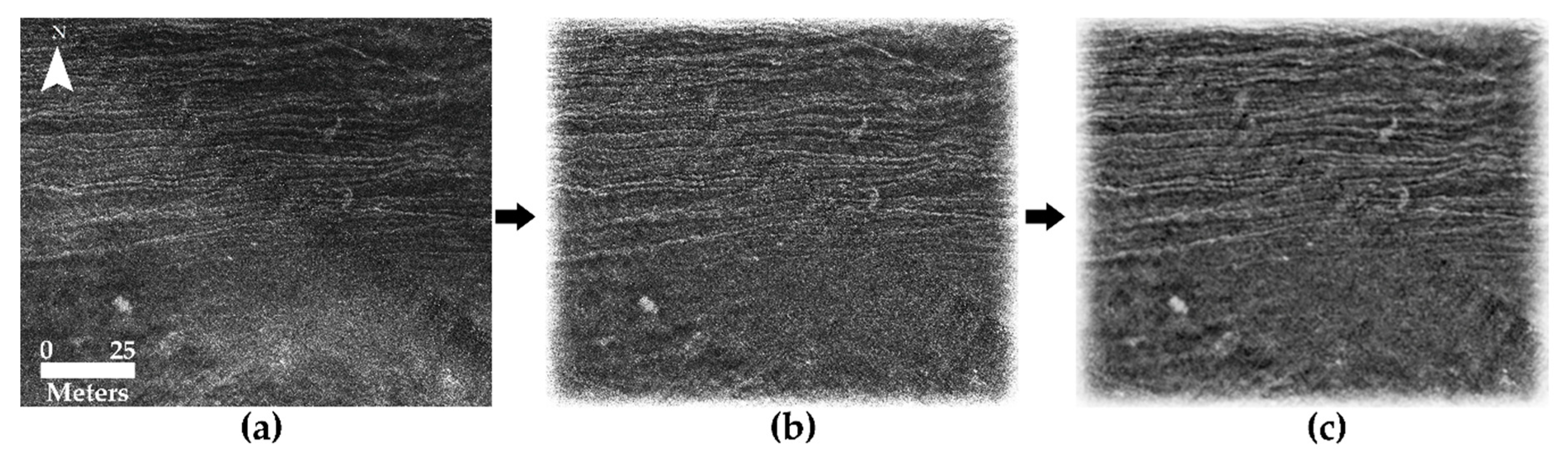
3.1. Preprocessing Techniques
3.1.1. Intensity Normalization
3.1.2. Edge Preserving Smoothing
- is the whole image,
- symbolizes the intensity,
- is the spatial gaussian kernel
- where is the Euclidean distance between ξ and x,
- is an edge stopping function in intensity domain where
- is the distance between the two intensity values and , and is a normalization constant:
3.2. Seafloor Characterization and Linear Seabed Feature Detection
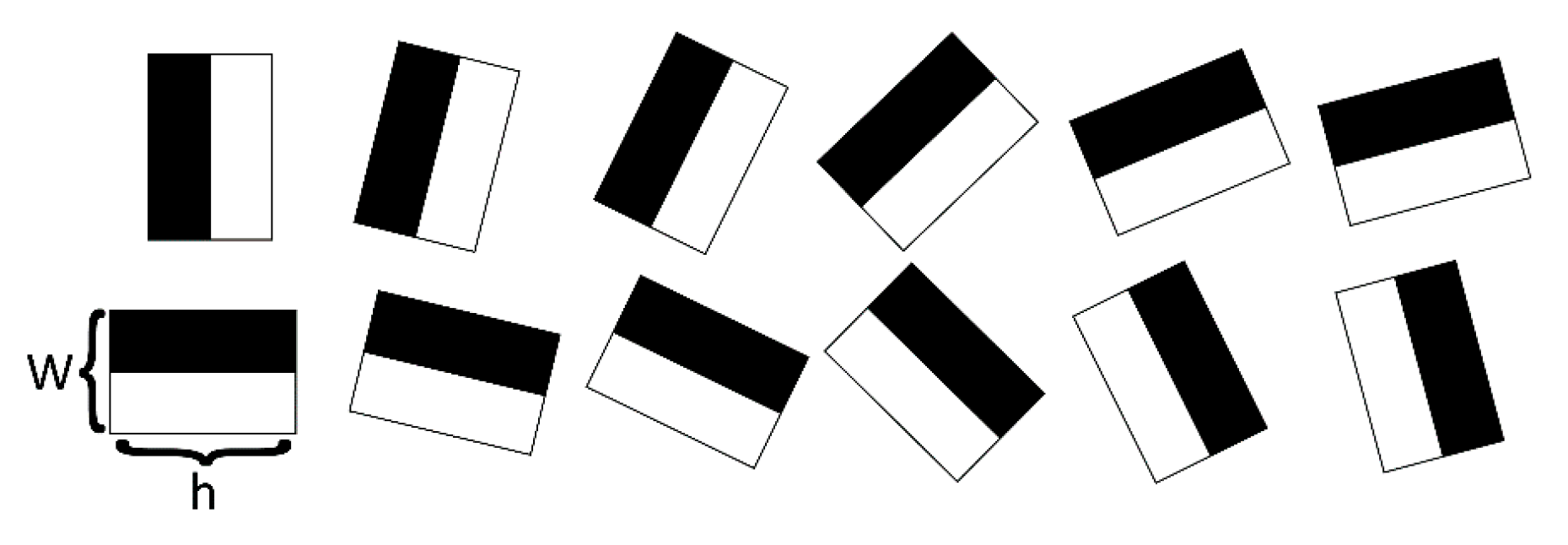
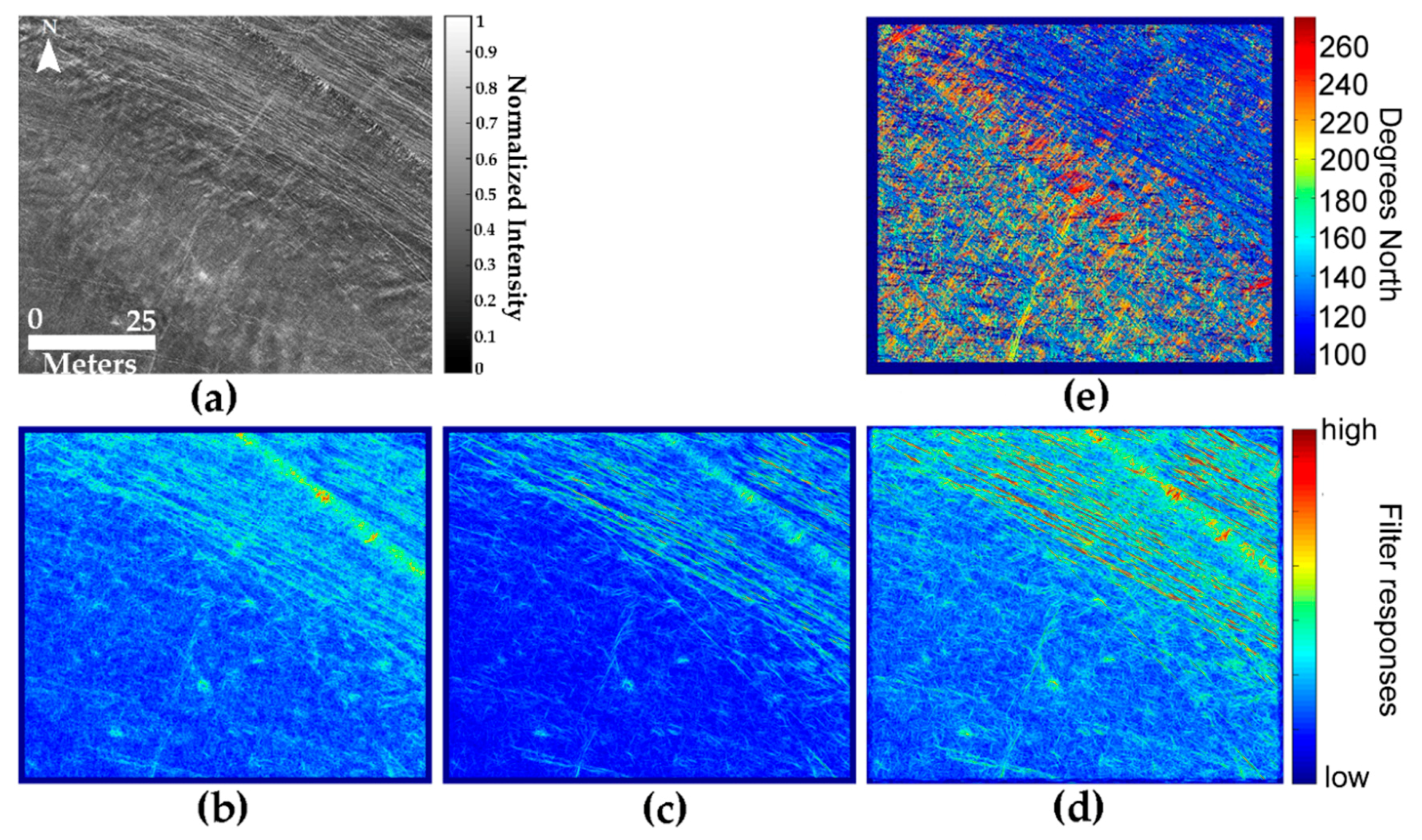
3.2.1. Multi-Scale Rotated Haar-Like Features
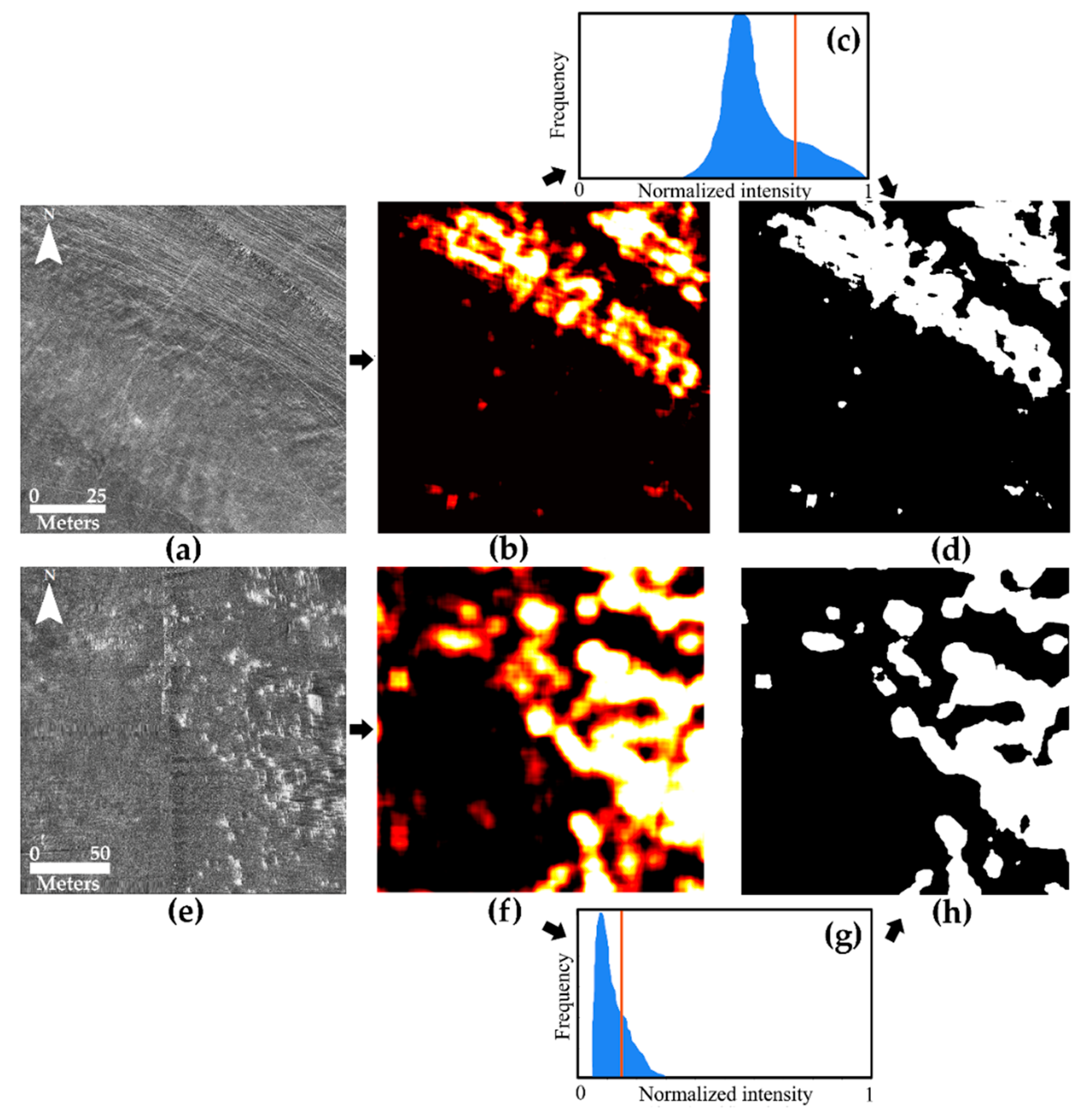
3.2.2. Seafloor Characterization
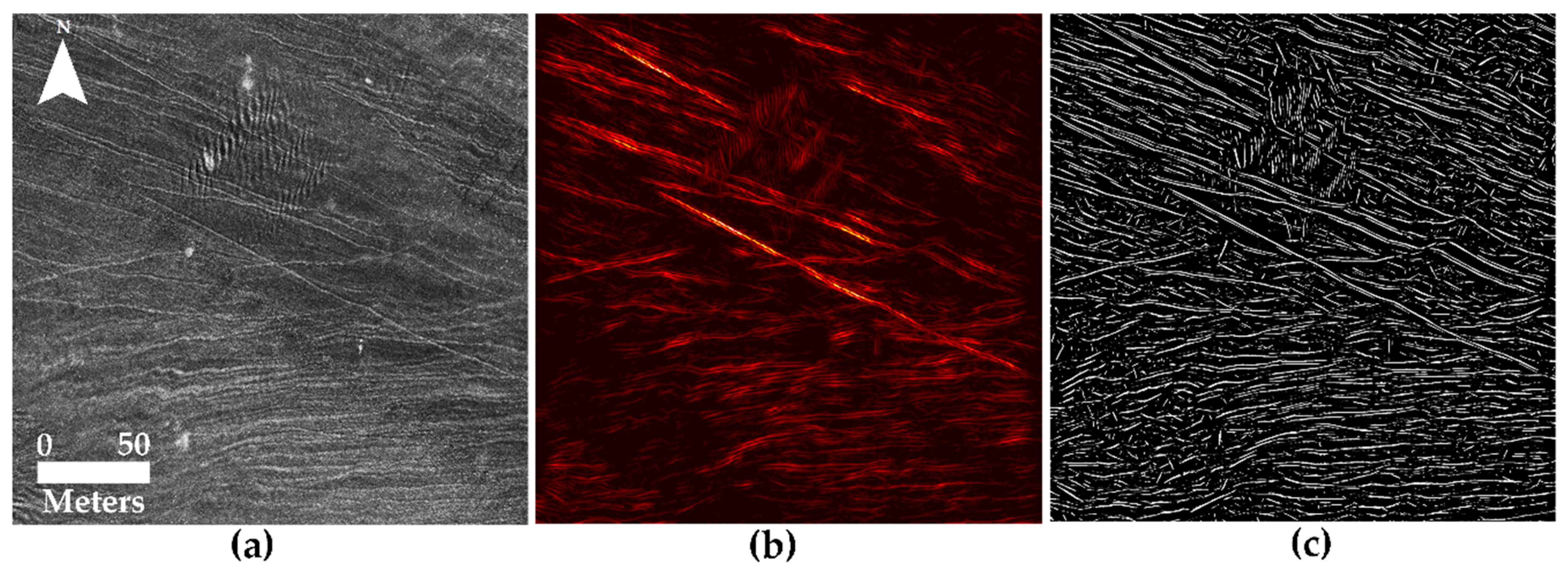
3.2.3. Linear Seafloor Feature Detection
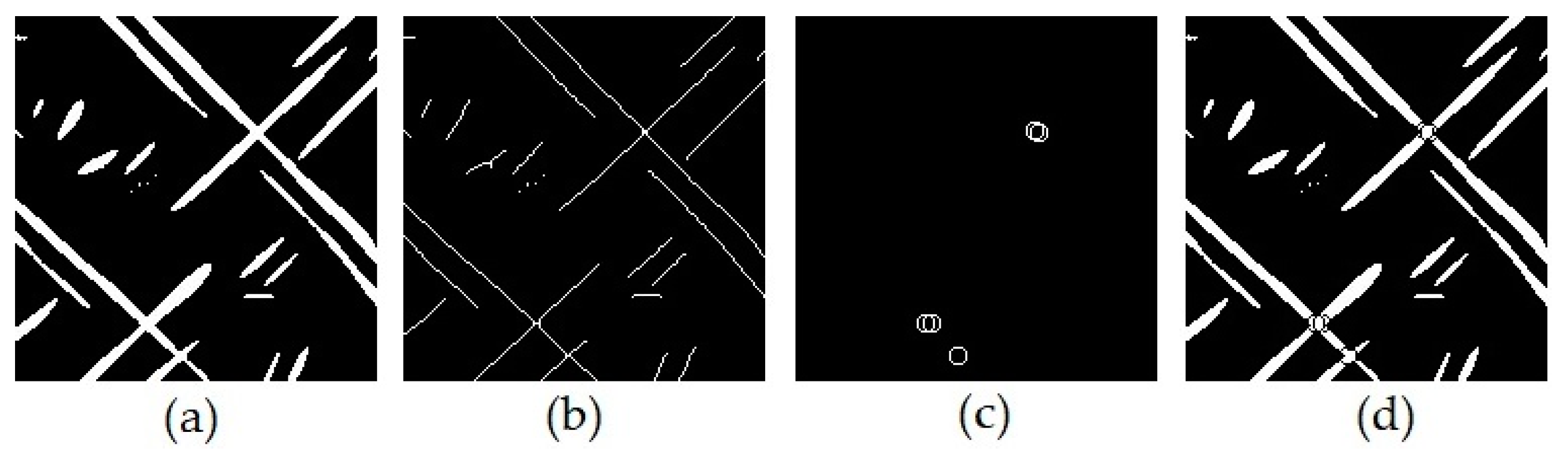
3.2.4. Splitting Lines at Intersections through Morphological Operations
3.3. TMs Extraction through Geometric and Textural Criteria, and Trawling Grounds Quantification
4. Validation Data and Accuracy Assessment
5. Results
5.1. Data Interpretation and Seafloor Characterization through Anisotropy and Complexity Definitions
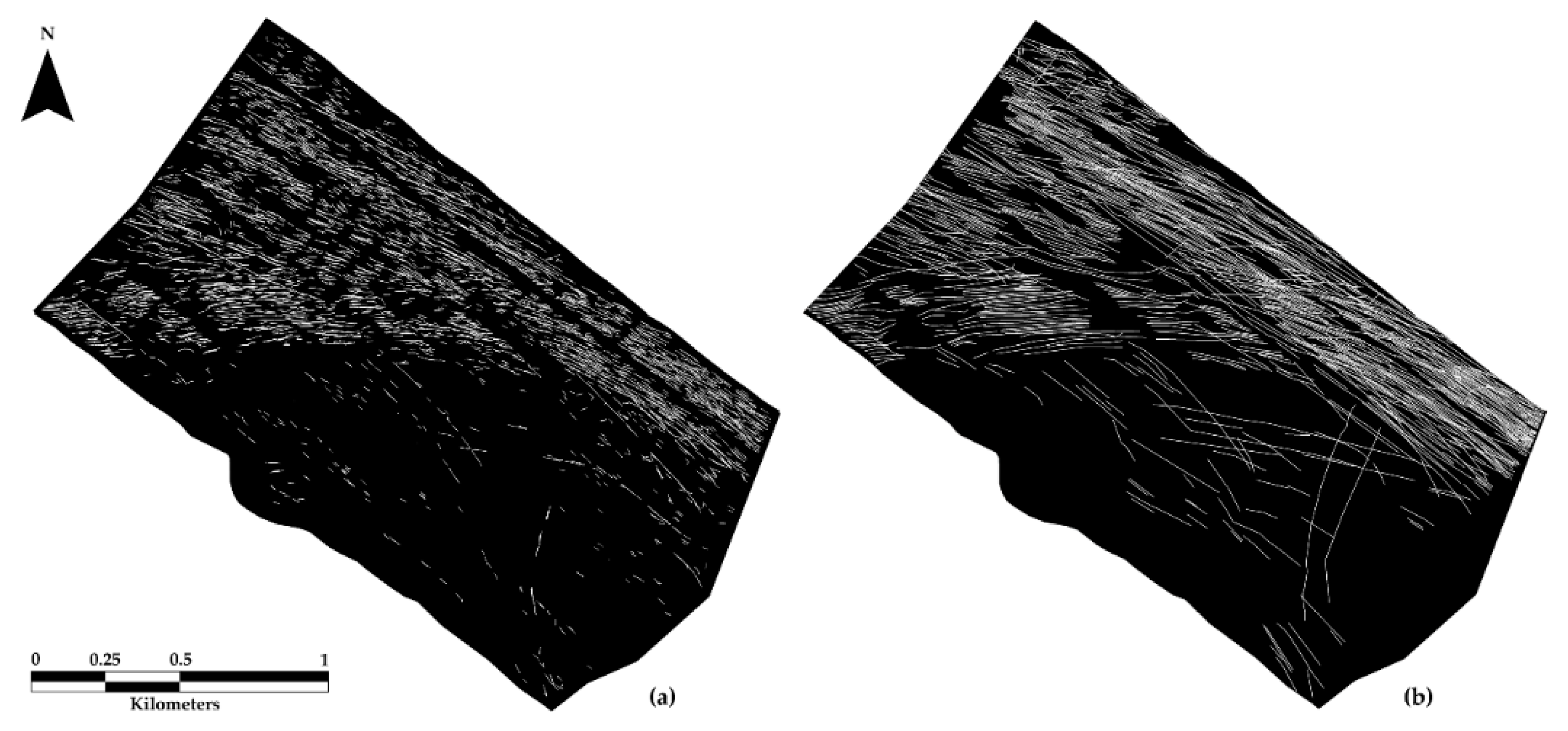
5.2. Trawl-Marks Extraction and Quantification
5.3. Accuracy Assessment
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rosales, R.M.P. SEAT: Measuring socio-economic benefits of marine protected areas. Mar. Policy 2018, 92, 120–130. [Google Scholar] [CrossRef]
- Sanchirico, J.N.; Cochran, K.A.; Emerson, P.M. Marine Protected Areas: Economic and Social Implications; No. 1318-2016-103151; Resources for the Future: Washington, DC, USA, 2002. [Google Scholar]
- Bennett, N.J. Marine Social Science for the Peopled Seas. Coast. Manag. 2019, 47, 244–252. [Google Scholar] [CrossRef]
- Russi, D.; Pantzar, M.; Kettunen, M.; Gitti, G.; Mutafoglu, K.; Kotulak, M.; ten Brink, P. Socio-Economic Benefits of the EU Marine Protected Areas; Institute for European Environmental Policy: London, UK, 2016. [Google Scholar]
- Oberle, F.K.J.; Puig, P.; Martín, J. Fishing Activities. In Submarine Geomorphology; Micallef, A., Krastel, S., Savini, A., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 503–534. ISBN 978-3-319-57852-1. [Google Scholar]
- Ramirez-Llodra, E.; Tyler, P.A.; Baker, M.C.; Bergstad, O.A.; Clark, M.R.; Escobar, E.; Levin, L.A.; Menot, L.; Rowden, A.A.; Smith, C.R.; et al. Man and the Last Great Wilderness: Human Impact on the Deep Sea. PLoS ONE 2011, 6, e22588. [Google Scholar] [CrossRef] [PubMed]
- Woodall, L.; Stewart, C.; Rogers, A. Function of the High Seas and Anthropogenic Impacts Science Update 2012–2017; University of Oxford: Oxford, UK, 2017. [Google Scholar]
- Merillet, L.; Mouchet, M.; Robert, M.; Salaün, M.; Schuck, L.; Vaz, S.; Kopp, D. Using underwater video to assess megabenthic community vulnerability to trawling in the Grande Vasière (Bay of Biscay). Environ. Conserv. 2017, 45, 163–172. [Google Scholar] [CrossRef]
- Riemann, B.; Hoffmann, E. Ecological consequences of dredging and bottom trawling in the Limfjord, Denmark. Mar. Ecol. Ser. 1991, 69, 171–178. [Google Scholar] [CrossRef]
- Robelly, M.; Beaman, R.J. Spatial analysis of seabed trawl marks, Frederick Patches, northern Great Barrier Reef. In Proceedings of the SEES Research Student Conference, Townsville, Australia, 1 November 2011. [Google Scholar]
- Jones, J.B. Environmental impact of trawling on the seabed: A review. N. Z. J. Mar. Freshw. Res. 1992, 26, 59–67. [Google Scholar] [CrossRef]
- Kiparissis, S.; Fakiris, E.; Papatheodorou, G.; Geraga, M.; Kornaros, M.; Kapareliotis, A.; Ferentinos, G. Illegal trawling and induced invasive algal spread as collaborative factors in a Posidonia oceanica meadow degradation. Biol. Invasions 2011, 13, 669–678. [Google Scholar] [CrossRef]
- Georgiadis, M.; Papatheodorou, G.; Tzanatos, E.; Geraga, M.; Ramfos, A.; Koutsikopoulos, C.; Ferentinos, G. Coralligène formations in the eastern Mediterranean Sea: Morphology, distribution, mapping and relation to fisheries in the southern Aegean Sea (Greece) based on high-resolution acoustics. J. Exp. Mar. Biol. Ecol. 2009, 368, 44–58. [Google Scholar] [CrossRef]
- Ingrassia, M.; Martorelli, E.; Bosman, A.; Chiocci, F.L. Isidella elongata (Cnidaria: Alcyonacea): First report in the Ventotene Basin (Pontine Islands, western Mediterranean Sea). Reg. Stud. Mar. Sci. 2019, 25, 100494. [Google Scholar] [CrossRef]
- Brennan, M.L.; Davis, D.; Ballard, R.D.; Trembanis, A.C.; Vaughn, J.I.; Krumholz, J.S.; Delgado, J.P.; Roman, C.N.; Smart, C.; Bell, K.L.C.; et al. Quantification of bottom trawl fishing damage to ancient shipwreck sites. Mar. Geol. 2016, 371, 82–88. [Google Scholar] [CrossRef]
- Krumholz, J.S.; Brennan, M.L. Fishing for common ground: Investigations of the impact of trawling on ancient shipwreck sites uncovers a potential for management synergy. Mar. Policy 2015, 61, 127–133. [Google Scholar] [CrossRef]
- Jennings, S.; Nicholson, M.D.; Dinmore, T.A.; Lancaster, J.E. Effects of chronic trawling disturbance on the production of infaunal communities. Mar. Ecol. Prog. Ser. 2002, 243, 251–260. [Google Scholar] [CrossRef]
- Board, O.S.; National Research Council. Effects of Trawling and Dredging on Seafloor Habitat; National Academies Press: Washington, DC, USA, 2002. [Google Scholar]
- Eigaard, O.R.; Bastardie, F.; Breen, M.; Dinesen, G.E.; Hintzen, N.T.; Laffargue, P.; Mortensen, L.O.; Nielsen, J.R.; Nilsson, H.C.; Neill, F.G.O.; et al. Estimating seabed pressure from demersal trawls, seines, and dredges based on gear design and dimensions. ICES J. Mar. Sci. 2016, 73, i27–i43. [Google Scholar] [CrossRef]
- Buhl-Mortensen, L.; Ellingsen, K.; Buhl-Mortensen, P.; Skaar, K.L.; Gonzalez-Mirelis, G.L. Trawling disturbance on megabenthos and sediment in the Barents Sea: Chronic effects on density, diversity, and composition. ICES J. Mar. Sci. 2015, 73, i98–i114. [Google Scholar] [CrossRef]
- Kenny, A.J.; Andrulewicz, E.; Bokuniewicz, H.; Boyd, S.E.; Breslin, J.; Brown, C.; Cato, I.; Costelloe, J.; Desprez, M.; Dijkshoorn, C.; et al. An overview of seabed mapping technologies in the context of marine habitat classification. ICES J. Mar. Sci. 2003, 60, 411–418. [Google Scholar] [CrossRef]
- Bell, J.M. A Model for the Simulation of Sidescan Sonar; Heriot-Watt University: Edinburgh, UK, 1995. [Google Scholar]
- Wang, X.; Zhao, J.; Zhu, B.; Jiang, T.; Qin, T. A Side Scan Sonar Image Target Detection Algorithm Based on a Neutrosophic Set and Diffusion Maps. Remote Sens. 2018, 10, 295. [Google Scholar] [CrossRef]
- Patsourakis, M.-J.; Fakiris, E.; Papatheodorou, G. A method to estimate otter trawling effects on the seafloor morphology: A case study from Gulf of Patras, Greece. In Proceedings of the 13th Pan-Hellenic Conference of the Greek Ichthyologists, Lesvos, Greece, 27–30 September 2007. [Google Scholar]
- Lazǎr, A.V.; Bugheanu, A.D.; Ungureanu, G.V.; Ionescu, A.D. Side-scan sonar mapping of anthropogenically influenced seafloor: A case-study of Mangalia Harbor, Romania. Geo-Eco-Marina 2013, 19, 59–64. [Google Scholar]
- Fakiris, E.; Papatheodorou, G. Calibration of Textural Analysis Parameters Towards Valid Classification of Sidescan Sonar Imagery. In Proceedings of the 2nd International Conference & Exhibition on “Underwater Acoustic Measurements: Technologies & Results” Papadakis and Bjorno, Crete, Greece, 25–29 June 2007; pp. 1253–1264. [Google Scholar]
- Krost, P.; Bernhard, M.; Werner, F.; Hukriede, W. Otter trawl tracks in Kiel Bay (Western Baltic) mapped by side-scan sonar. Meeresforsch 1990, 32, 344–353. [Google Scholar]
- Demestre, M.; Muntadas, A.; de Juan, S.; Mitilineou, C.; Sartor, P.; Mas, J.; Kavadas, S.; Martín, J. The need for fine-scale assessment of trawl fishing effort to inform on an ecosystem approach to fisheries: Exploring three data sources in Mediterranean trawling grounds. Mar. Policy 2015, 62, 134–143. [Google Scholar] [CrossRef]
- Friedlander, A.M.; Boehlert, G.W.; Field, M.E.; Mason, J.E.; Gardner, J.V.; Dartnell, P. Sidescan-sonar mapping of benthic trawl marks on the shelf and slope off Eureka, California. Fish. Bull. 1999, 97, 786–801. [Google Scholar]
- Palanques, A.; Puig, P.; Guillén, J.; Demestre, M.; Martín, J. Effects of bottom trawling on the Ebro continental shelf sedimentary system (NW Mediterranean). Cont. Shelf Res. 2014, 72, 83–98. [Google Scholar] [CrossRef]
- Palanques, A.; Guillén, J.; Puig, P. Impact of bottom trawling on water turbidity and muddy sediment of an unfished continental shelf. Limnol. Oceanogr. 2001, 46, 1100–1110. [Google Scholar] [CrossRef]
- Sanchez, P. The impact of otter trawling on mud communities in the northwestern Mediterranean. ICES J. Mar. Sci. 2000, 57, 1352–1358. [Google Scholar] [CrossRef]
- Humborstad, O.B.; Nøttestad, L.; Løkkeborg, S.; Rapp, H.T. RoxAnn bottom classification system, sidescan sonar and video-sledge: Spatial resolution and their use in assessing trawling impacts. ICES J. Mar. Sci. 2004, 61, 53–63. [Google Scholar] [CrossRef]
- Tuck, I.D.; Hall, S.J.; Robertson, M.R.; Armstrong, E.; Basford, D.J. Effects of physical trawling disturbance in a previously unfished sheltered Scottish sea loch. Mar. Ecol. Prog. Ser. 1998, 162, 227–242. [Google Scholar] [CrossRef]
- DeAlteris, J.; Skrobe, L.; Lipsky, C. The significance of seabed disturbance by mobile fishing gear relative to natural processes: A case study in Narragansett Bay, Rhode Island. Am. Fish. Soc. 1999, 22, 224–237. [Google Scholar]
- Dellapenna, T.M.; Allison, M.A.; Gill, G.A.; Lehman, R.D.; Warnken, K.W. The impact of shrimp trawling and associated sediment resuspension in mud dominated, shallow estuaries. Estuar. Coast. Shelf Sci. 2006, 69, 519–530. [Google Scholar] [CrossRef]
- De Juan, S.; Lo Iacono, C.; Demestre, M. Benthic habitat characterisation of soft-bottom continental shelves: Integration of acoustic surveys, benthic samples and trawling disturbance intensity. Estuar. Coast. Shelf Sci. 2013, 117, 199–209. [Google Scholar] [CrossRef]
- De Juan, S.; Demestre, M.; Sanchez, P. Exploring the degree of trawling disturbance by the analysis of benthic communities ranging from a heavily exploited fishing ground to an undisturbed area in the NW Mediterranean. Sci. Mar. 2011, 75, 507–516. [Google Scholar] [CrossRef]
- Smith, C.J.; Banks, A.C.; Papadopoulou, K.N. Improving the quantitative estimation of trawling impacts from sidescan-sonar and underwater-video imagery. ICES J. Mar. Sci. 2007, 64, 1692–1701. [Google Scholar] [CrossRef]
- Lucchetti, A.; Sala, A.; Jech, J.M. Impact and performance of Mediterranean fishing gear by side-scan sonar technology. Can. J. Fish. Aquat. Sci. 2012, 69, 1806–1816. [Google Scholar] [CrossRef]
- González, B.G.; Petillot, Y.; Smith, C. Detection and classification of trawling marks in side scan sonar images. In Proceedings of the Advances in Technology for Underwater Vehicles Conference, ExCeL, London, UK, 16–17 March 2004. [Google Scholar]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef]
- Sams, T.; Hansen, J.L.; Thisen, E.; Stage, B. Segmentation of Sidescan Sonar Images; Danish Defence Research Establishment: Copenhagen, Denmark, 2004. [Google Scholar]
- Malik, M.A.; Mayer, L.A. Investigation of seabed fishing impacts on benthic structure using multi-beam sonar, sidescan sonar, and video. In Proceedings of the U.S. Hydrographic Conference, San Diego, CA, USA, 29–31 March 2005. [Google Scholar]
- Tang, Y.; Yu, X.; Wang, N. Trawling Pattern Analysis with Neural Classifier. In Proceedings of the Second International Conference on Advances in Natural Computation, ICNC’06—Volume Part I, Xi’an, China, 24–28 September 2006; Springer: Basel, Switzerland, 2006; pp. 598–601. [Google Scholar]
- Feldens, P.; Darr, A.; Feldens, A.; Tauber, F. Detection of Boulders in Side Scan Sonar Mosaics by a Neural Network. Geosciences 2019, 9, 159. [Google Scholar] [CrossRef]
- Bourgeois, B.; Walker, C. Sidescan Sonar Image Interpretation with Neural Networks. In Proceedings of the OCEANS 91, Honolulu, HI, USA, 1–3 October 1991; pp. 1687–1694. [Google Scholar]
- Blondel, P.; Parson, L.M.; Robigou, V. TexAn: Textural analysis of sidescan sonar imagery and generic seafloor characterisation. In Proceedings of the IEEE Oceanic Engineering Society, OCEANS’98, Nice, France, 28 September–1 October 1998; Volume 1, pp. 419–423. [Google Scholar]
- Fakiris, E.; Papatheodorou, G. Sonar Class: A MATLAB toolbox for the classification of side scan sonar imagery, using local textural and reverberational characteristics. In Proceedings of the International Conference on Underwater Acoustic Measurements (UAM), Nafplion, Greece, 21–26 June 2009; pp. 1445–1450. [Google Scholar]
- QTC (Quester Tangent Corporation). QTC Multiview, Acoustic Seabed Classification for Multibeam Sonar; QTC: Sidney, Canada, 2005. [Google Scholar]
- Tuceryan, M.; Jain, A.K. Texture Analysis. In The Handbook of Pattern Recognition and Computer Vision; Chen, C.H., Pau, L.F., Wang, P.S.P., Eds.; World Scientific Publishing Co., Inc.: River Edge, NJ, USA, 1993; pp. 235–276. ISBN 981-02-1136-8. [Google Scholar]
- Haralick, R.M. Statistical and structural approaches to texture. Proc. IEEE 1979, 67, 786–804. [Google Scholar] [CrossRef]
- Fakiris, E.; Papatheodorou, G. Quantification of regions of interest in swath sonar backscatter images using grey-level and shape geometry descriptors: The TargAn software. Mar. Geophys. Res. 2012, 33, 169–183. [Google Scholar] [CrossRef]
- Cross, G.R.; Jain, A.K. Markov Random Field Texture Models. IEEE Trans. Pattern Anal. Mach. Intell. 1983, PAMI-5, 25–39. [Google Scholar] [CrossRef]
- Super, B.J.; Bovr, A.C. Localized Measurement of Image Fractal Dimension Using Gabor Filters. J. Vis. Commun. Image Represent. 1991, 2, 114–128. [Google Scholar] [CrossRef]
- Daniell, O.; Petillot, Y.; Reed, S. Unsupervised sea-floor classification for automatic target recognition. In Proceedings of the International Conference on Underwater Remote Sensing, Brest, France, 10–11 October 2012. [Google Scholar]
- Bajcsy, R.; Lieberman, L. Texture Gradient as a Depth Cue. Comput. Graph. Image Process. 1976, 5, 52–67. [Google Scholar] [CrossRef]
- Piper, D.; Panagos, A. Surficial sediments of the Gulf of Patras. Thalassographica 1980, 3, 5–20. [Google Scholar]
- Ferentinos, G.; Brooks, M.; Doutsos, T. Quaternary tectonics in the Gulf of Patras, western Greece. J. Struct. Geol. 1985, 7, 713–717. [Google Scholar] [CrossRef]
- Maina, I.; Kavadas, S.; Katsanevakis, S.; Somarakis, S.; Tserpes, G.; Georgakarakos, S. A methodological approach to identify fishing grounds: A case study on Greek trawlers. Fish. Res. 2016, 183, 326–339. [Google Scholar] [CrossRef]
- Throckmorton, P.; Edgerton, H.E.; Yalouris, E. The Battle of Lepanto search and survey mission (Greece), 1971–72. Int. J. Naut. Archaeol. 1973, 2, 121–130. [Google Scholar] [CrossRef]
- Fakiris, E.; Williams, D.; Couillard, M.; Fox, W. Sea-floor acoustic anisotropy and complexity assessment towards prediction of ATR performance. In Proceedings of the International Conference on Underwater Acoustics, Corfu, Greece, 23–28 June 2013; pp. 1277–1284. [Google Scholar]
- Garcia, R.; Nicosevici, T.; Cufi, X. On the way to solve lighting problems in underwater imaging. In Proceedings of the Oceans ’02 MTS/IEEE, Biloxi, MI, USA, 29–31 October 2002; Volume 2, pp. 1018–1024. [Google Scholar]
- Parker, J.R. Algorithms for Image Processing and Computer Vision, 2nd ed.; Wiley Publishing: Indianapolis, IN, USA, 2010; ISBN 0470643854. [Google Scholar]
- Mandhouj, I.; Amiri, H.; Maussang, F.; Solaiman, B. Sonar image processing for underwater object detection based on high resolution system. In Proceedings of the Second Workshop on Signal and Document Processing, Hammamet, Tunisia, 18–22 December 2012. [Google Scholar]
- Tomasi, C.; Manduchi, R. Bilateral filtering for gray and color images. In Proceedings of the Sixth International Conference on Computer Vision (IEEE Cat. No.98CH36271), Bombay, India, 7 January 1998; pp. 839–846. [Google Scholar]
- Pallavi, C.; Siddeswara Reddy, S. Denoising of an Image using Bilateral Filter on FPGA. Int. J. Eng. Res. Technol. 2015, 4, 142–147. [Google Scholar] [CrossRef]
- Durand, F.; Dorsey, J. Fast bilateral filtering for the display of high-dynamic-range images. In Proceedings of the 29th Annual Conference on Computer Graphics and Interactive Techniques—SIGGRAPH ’02, San Antonio, TX, USA, 21–26 July 2002; pp. 257–266. [Google Scholar]
- Viola, P.; Jones, M. Robust real-time face detection. Int. J. Comput. Vis. 2004, 57, 137–154. [Google Scholar] [CrossRef]
- Fakiris, E.; Zoura, D.; Ramfos, A.; Spinos, E.; Georgiou, N.; Ferentinos, G.; Papatheodorou, G. Object-based classification of sub-bottom profiling data for benthic habitat mapping. Comparison with sidescan and RoxAnn in a Greek shallow-water habitat. Estuar. Coast. Shelf Sci. 2018, 208, 219–234. [Google Scholar] [CrossRef]
- Fakiris, E.; Blondel, P.; Papatheodorou, G.; Christodoulou, D.; Dimas, X.; Georgiou, N.; Kordella, S.; Dimitriadis, C. Multi-Frequency, Multi-Sonar Mapping of Shallow Habitats—Efficacy and Management Implications in the National Marine Park of Zakynthos, Greece. Remote Sens. 2019, 11, 461. [Google Scholar] [CrossRef]
- Williams, D.P.; Fakiris, E. Exploiting Environmental Information for Improved Underwater Target Classification in Sonar Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6284–6297. [Google Scholar] [CrossRef]
- Rahnemoonfar, M.; Yari, M.; Rahman, A.; Kline, R. The First Automatic Method for Mapping the Pothole in Seagrass. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017; pp. 267–274. [Google Scholar]
- Tamsett, D.; Hogarth, P. Sidescan Sonar Beam Function and Seabed Backscatter Functions from Trace Amplitude and Vehicle Roll Data. IEEE J. Ocean. Eng. 2016, 41, 155–163. [Google Scholar]
- Tamsett, D. Geometrical Spreading Correction in Sidescan Sonar Seabed Imaging. J. Mar. Sci. Eng. 2017, 5, 54. [Google Scholar] [CrossRef]
- Al-Rawi, M.S.; Galdrán, A.; Yuan, X.; Eckert, M.; Martínez, J.F.; Elmgren, F.; Cürüklü, B.; Rodriguez, J.; Bastos, J.; Pinto, M. Intensity Normalization of Sidescan Sonar Imagery. In Proceedings of the 2016 Sixth International Conference on Image Processing Theory, Tools and Applications, Oulu, Finland, 12–15 December 2016. [Google Scholar]
- Chang, Y.-C.; Hsu, S.; Tsai, C. Sidescan sonar image processing: Correcting brightness variation and patching gaps. J. Mar. Sci. Technol. 2010, 18, 785–789. [Google Scholar]
- Burguera, A.; Oliver, G. High-resolution underwater mapping using Side-Scan Sonar. PLoS ONE 2016, 11, e0146396. [Google Scholar] [CrossRef] [PubMed]
- Anitha, U.; Malarkkan, S. A Novel Approach for Despeckling of Sonar Image. Indian J. Sci. Technol. 2015, 8, 252–259. [Google Scholar] [CrossRef]
- Tian, W. Side-scan sonar techniques for the characterization of physical properties of artificial benthic habitats. Braz. J. Oceanogr. 2011, 59, 77–90. [Google Scholar] [CrossRef]
- Wilken, D.; Feldens, P.; Wunderlich, T.; Heinrich, C. Application of 2D Fourier filtering for elimination of stripe noise in side-scan sonar mosaics. Geo-Mar. Lett. 2012, 32, 337–347. [Google Scholar] [CrossRef]
- Bradley, D.; Roth, G. Adaptive Thresholding Using the Integral Image. J. Graph. Tools 2007, 12, 13–21. [Google Scholar] [CrossRef]
- Modalavalasa, N.; Rao, G.S.; Prasad, K.S. A Novel Approach for Segmentation of Sector Scan Sonar Images using Adaptive Thresholding. Int. J. Inf. 2012, 2, 113–119. [Google Scholar] [CrossRef]
- Banerjee, S.; Ray, R.; Shome, S.N.; Sanyal, G. Noise induced feature enhancement and object segmentation of forward looking SONAR Image. Procedia Technol. 2014, 14, 125–132. [Google Scholar] [CrossRef]
- Parker, J.R. Gray level thresholding in badly illuminated images. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 813–819. [Google Scholar] [CrossRef]
- Correa, T.B.S.; Grasmueck, M.; Eberli, G.P.; Verwer, K.; Purkis, S.J. Deep Acoustic Applications. In Coral Reef Remote Sensing; Goodman, J.A., Purkis, S.J., Phinn, S.R., Eds.; Spinger: London, UK, 2013; pp. 253–282. ISBN 9789048192922. [Google Scholar]
- Peignon, C.; Kayal, M.; Poisson, E.; Adjeroud, M.; Penin, L. Spatial Patterns and Short-term Changes of Coral Assemblages Along a Cross-shelf Gradient in the Southwestern Lagoon of New Caledonia. Diversity 2019, 11, 21. [Google Scholar] [CrossRef]
- Morrison, M.A.; Jones, E.G.; Consalvey, M.; Berkenbusch, K. Linking Marine Fisheries Species to Biogenic Habitats in New Zealand: A Review and Synthesis of Knowledge; Aquatic Environment and Biodiversity Report No 130; Ministry for Primary Industries: Wellington, New Zealand, 2014; Volume 6480.
- Klaucke, I. Sidescan Sonar. In Submarine Geomorphology; Micallef, A., Krastel, S., Savini, A., Eds.; Springer: Cham, Switzerland, 2018; pp. 13–25. ISBN 9783319578521. [Google Scholar]
- Coggan, R.A.; Smith, C.J.; Atkinson, R.J.A.; Papadopoulou, K.N.; Stevenson, T.D.I.; Moore, P.G.; Tuck, I.D. Comparison of Rapid Methodologies for Quantifying Environmental Impacts of Otter Trawls; Final Report EU DG XIV Study Project 98/017. 2001. Available online: http://www.imbc.gr/institute/eco_bio/feg2/OTIP2.pdf (accessed on 28 March 2019).
- Williams, D.P.; Myers, V.; Silvious, M.S. Mine classification with imbalanced data. IEEE Geosci. Remote Sens. Lett. 2009, 6, 528–532. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Descriptive Statistics | TMs Length Automatic Method | TMs Length Manual Method |
|---|---|---|
| Min (m/km2) | 392 | 896 |
| Max (m/km2) | 86,176 | 90,493 |
| Mean (m/km2) | 25,369 | 26,226 |
| Total TMs in whole area (m/2.98km2) | 53,212 | 51,960 |
| Categories | Cases | TP | TN | FP | FN | Sensitivity | Specificity | Precision | Accuracy |
|---|---|---|---|---|---|---|---|---|---|
| Classes | 0 | 318 | 755 | 19 | 84 | 0.79 | 0.98 | 0.94 | 0.91 |
| <200 m | 655 | 361 | 103 | 57 | 0.92 | 0.78 | 0.86 | 0.86 | |
| 200–400 m | 108 | 796 | 95 | 117 | 0.38 | 0.89 | 0.53 | 0.77 | |
| >400 m | 104 | 886 | 111 | 75 | 0.58 | 0.89 | 0.48 | 0.84 | |
| Existence—absence | 755 | 318 | 84 | 19 | 0.98 | 0.79 | 0.9 | 0.91 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gournia, C.; Fakiris, E.; Geraga, M.; Williams, D.P.; Papatheodorou, G. Automatic Detection of Trawl-Marks in Sidescan Sonar Images through Spatial Domain Filtering, Employing Haar-Like Features and Morphological Operations. Geosciences 2019, 9, 214. https://doi.org/10.3390/geosciences9050214
Gournia C, Fakiris E, Geraga M, Williams DP, Papatheodorou G. Automatic Detection of Trawl-Marks in Sidescan Sonar Images through Spatial Domain Filtering, Employing Haar-Like Features and Morphological Operations. Geosciences. 2019; 9(5):214. https://doi.org/10.3390/geosciences9050214
Chicago/Turabian StyleGournia, Charikleia, Elias Fakiris, Maria Geraga, David P. Williams, and George Papatheodorou. 2019. "Automatic Detection of Trawl-Marks in Sidescan Sonar Images through Spatial Domain Filtering, Employing Haar-Like Features and Morphological Operations" Geosciences 9, no. 5: 214. https://doi.org/10.3390/geosciences9050214
APA StyleGournia, C., Fakiris, E., Geraga, M., Williams, D. P., & Papatheodorou, G. (2019). Automatic Detection of Trawl-Marks in Sidescan Sonar Images through Spatial Domain Filtering, Employing Haar-Like Features and Morphological Operations. Geosciences, 9(5), 214. https://doi.org/10.3390/geosciences9050214