Techniques for Classifying Seabed Morphology and Composition on a Subtropical-Temperate Continental Shelf

 , , ,
, , ,
Abstract
:1. Introduction
1.1. SeaBed NSW
1.2. Aims and Objectives
2. Materials and Methods
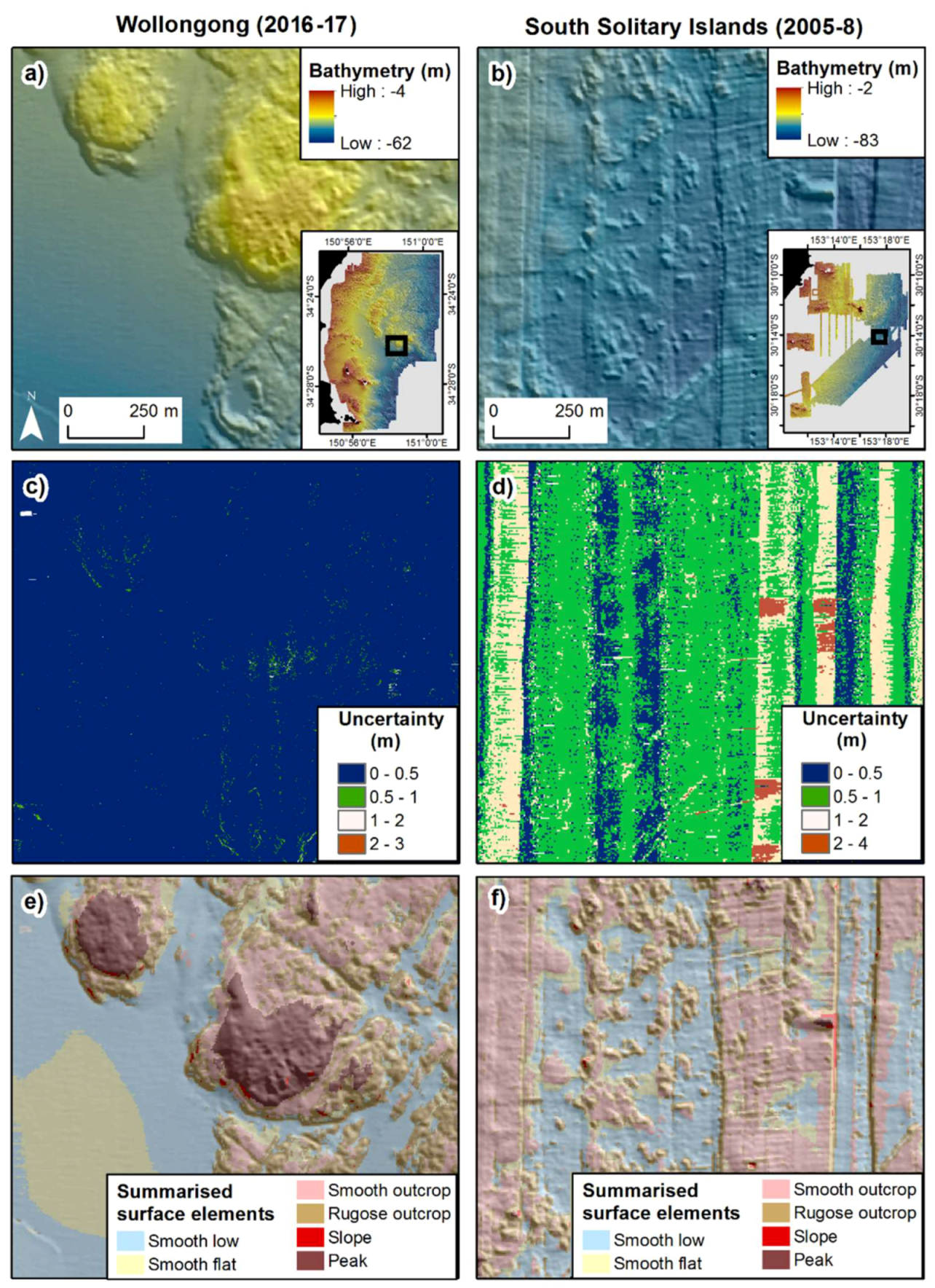
2.1. MBES Data Acquisiton and Processing
2.2. Digitial Elevation Models
2.3. Ground-Truthing Data Collection and Processing
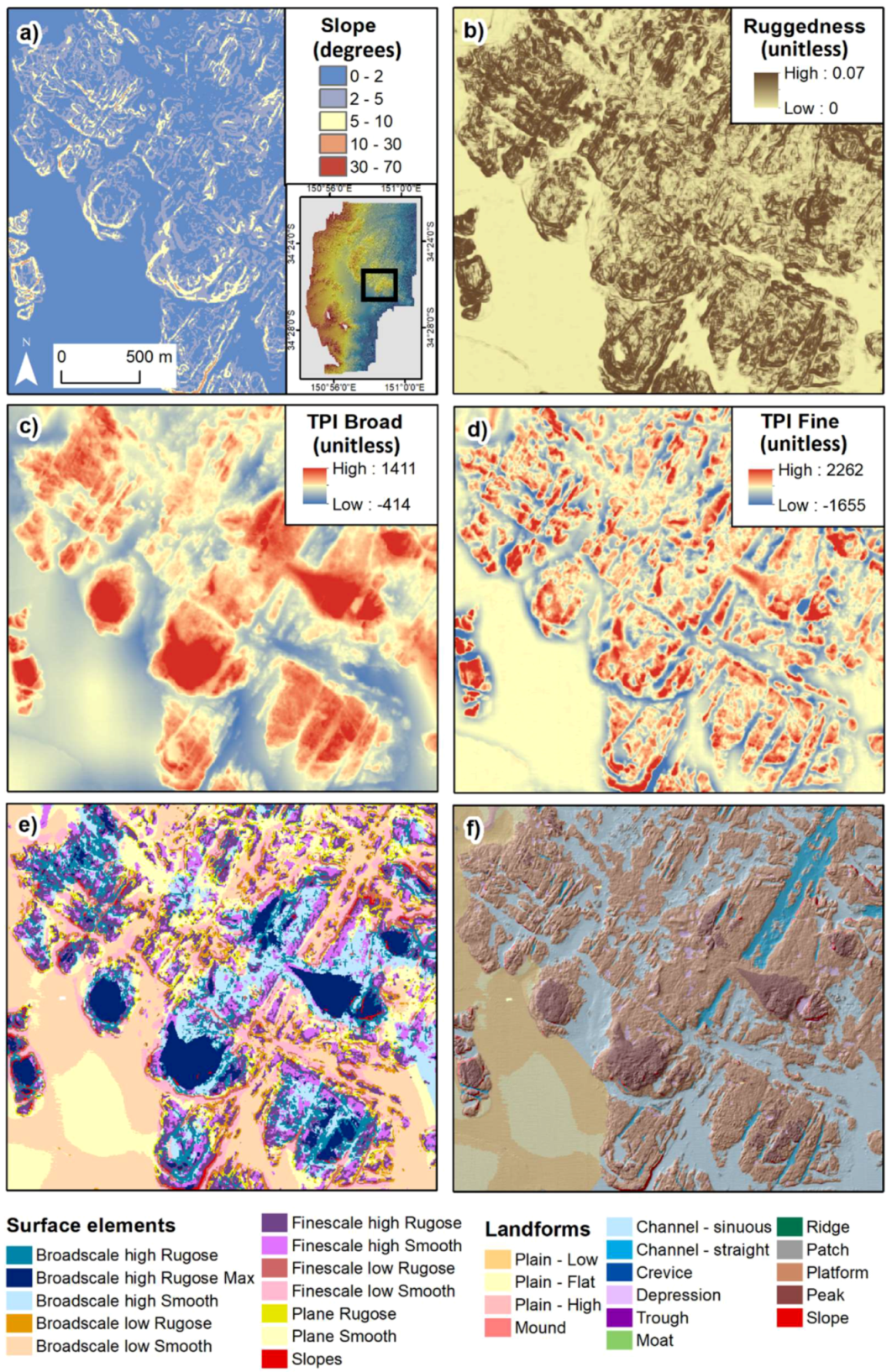
2.4. Derived Terrain Variables
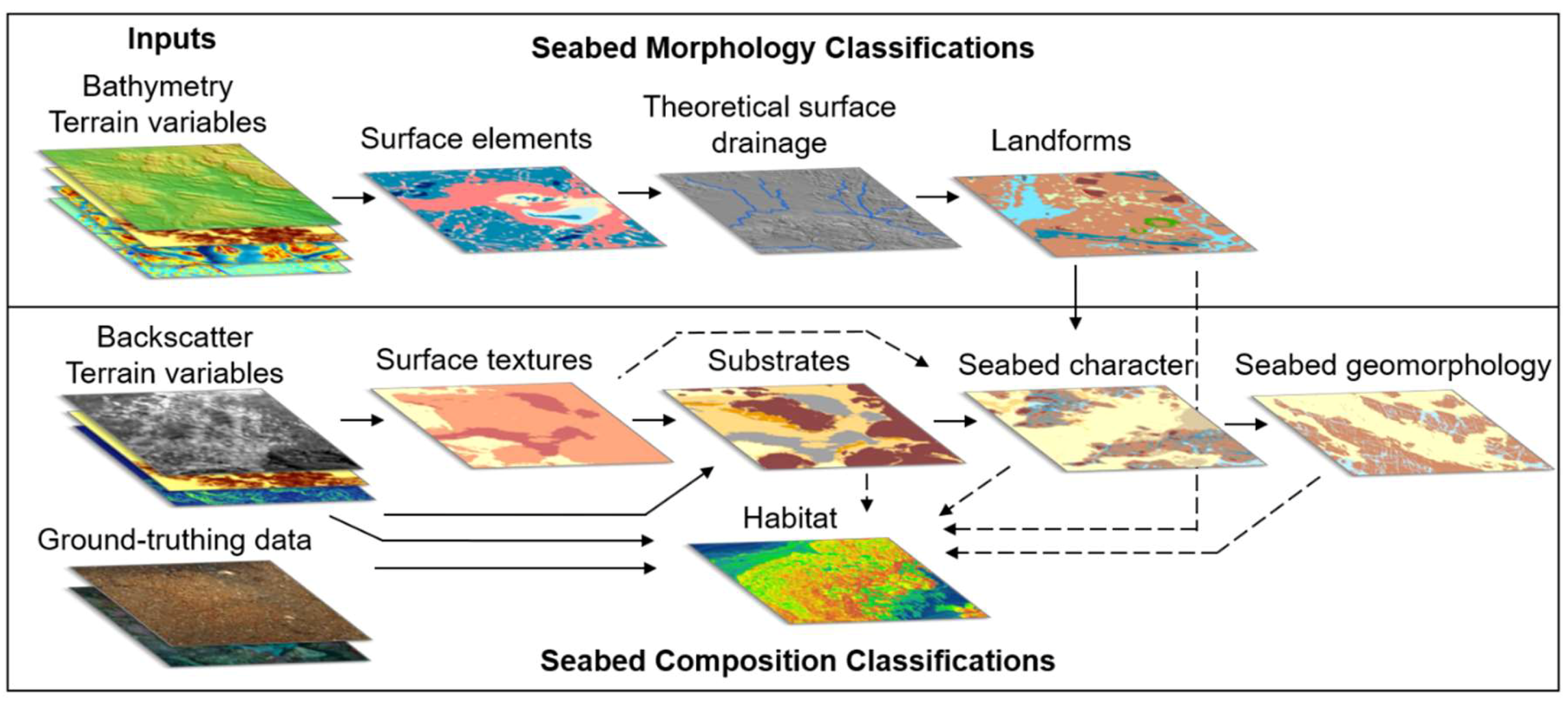
2.5. Classification of Seabed Morphology
2.5.1. Surface Elements
2.5.2. Theoretical Surface Drainage
2.5.3. Landforms
2.6. Classification of Seabed Composition
2.6.1. Seabed Textures
2.6.2. Seabed Substrates, Character, and Geomorphology
2.6.3. Seabed Habitats
3. Results
3.1. Terrain Variables
3.2. Seabed Morphology
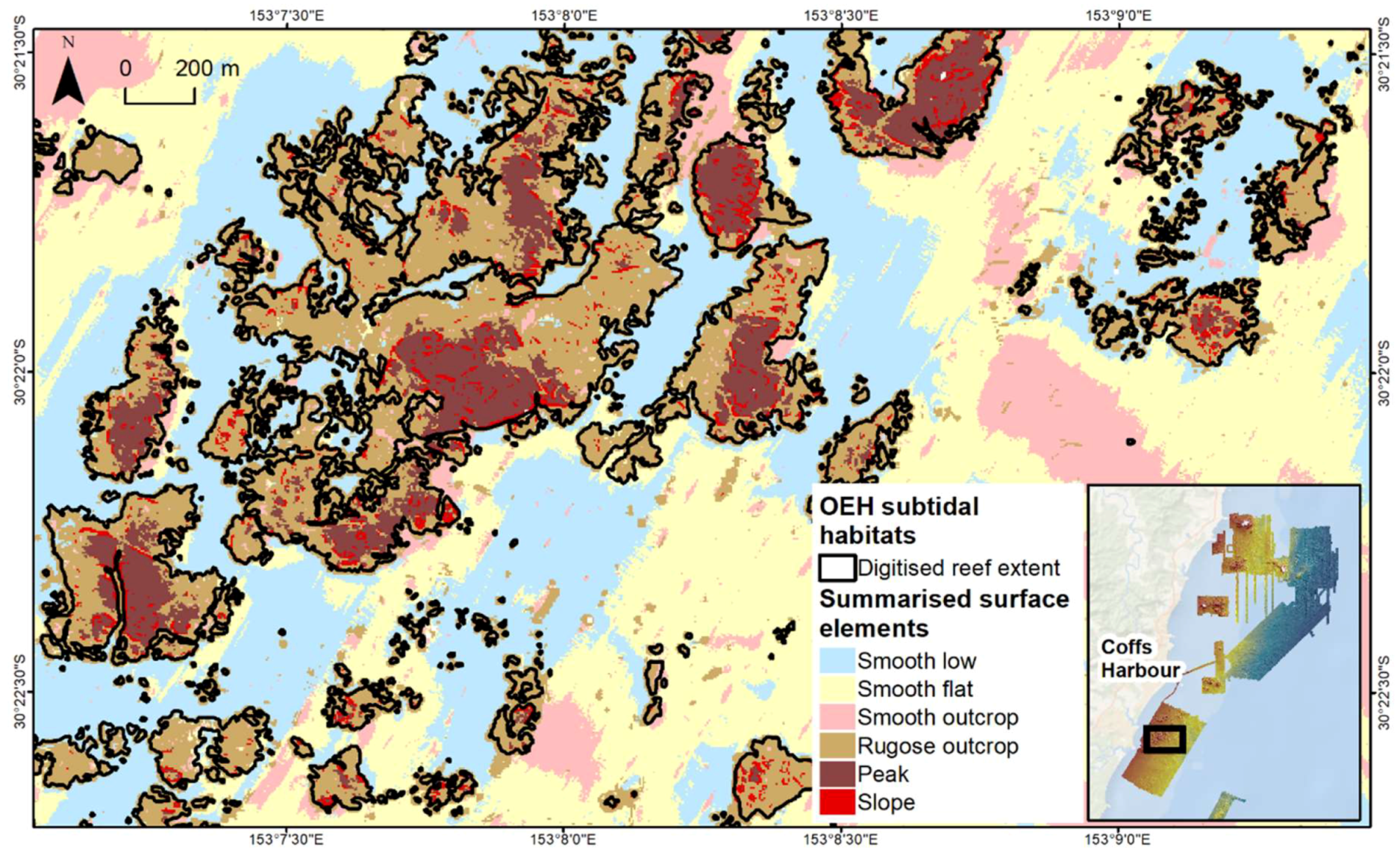
3.2.1. Surface Elements
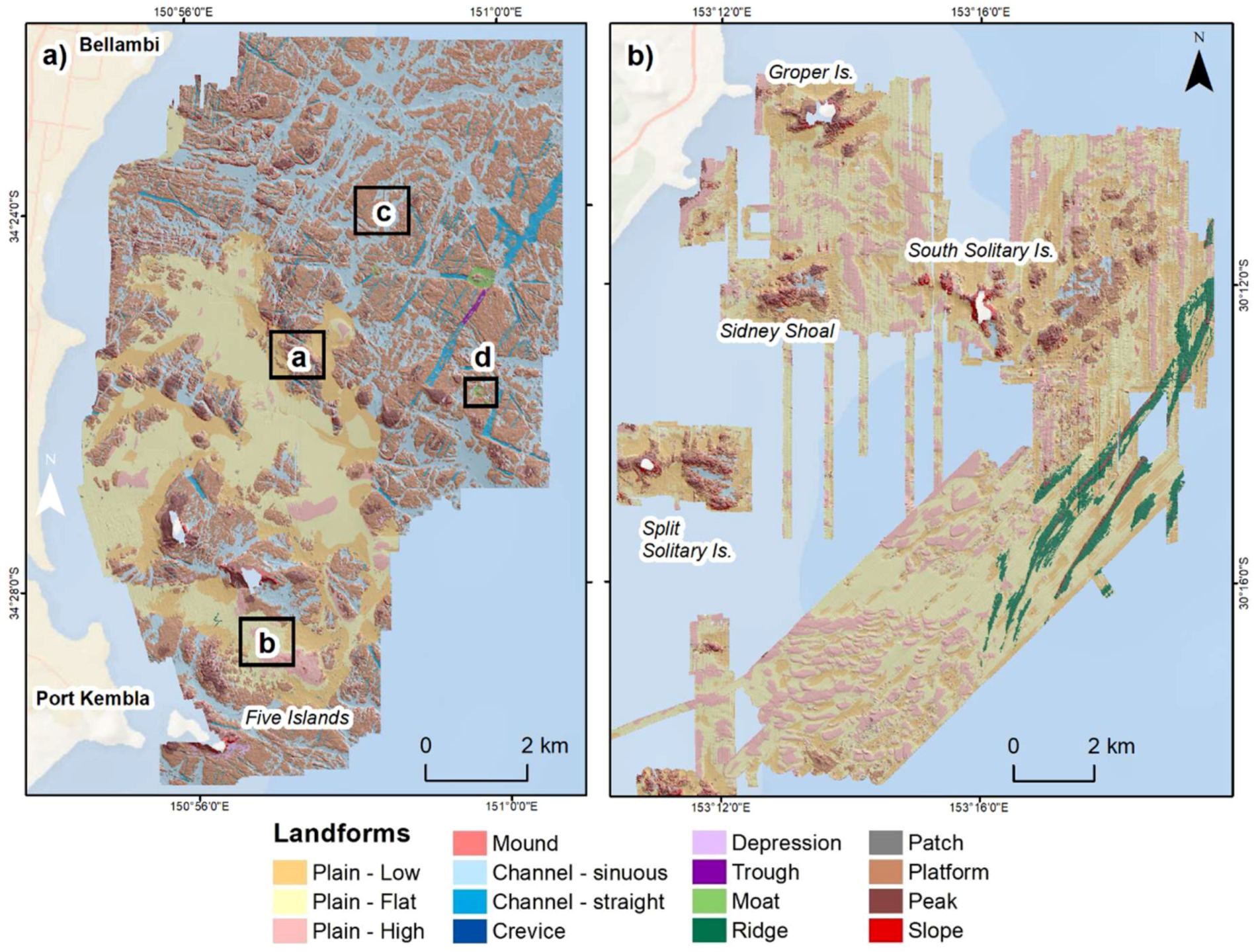
3.2.2. Landforms
3.3. Seabed Composition
3.3.1. Seabed Textures
3.3.2. Seabed Substrates, Character, and Geomorphology
3.3.3. Seabed Habitats
4. Discussion
4.1. Seabed Morphology
4.2. Seabed Composition
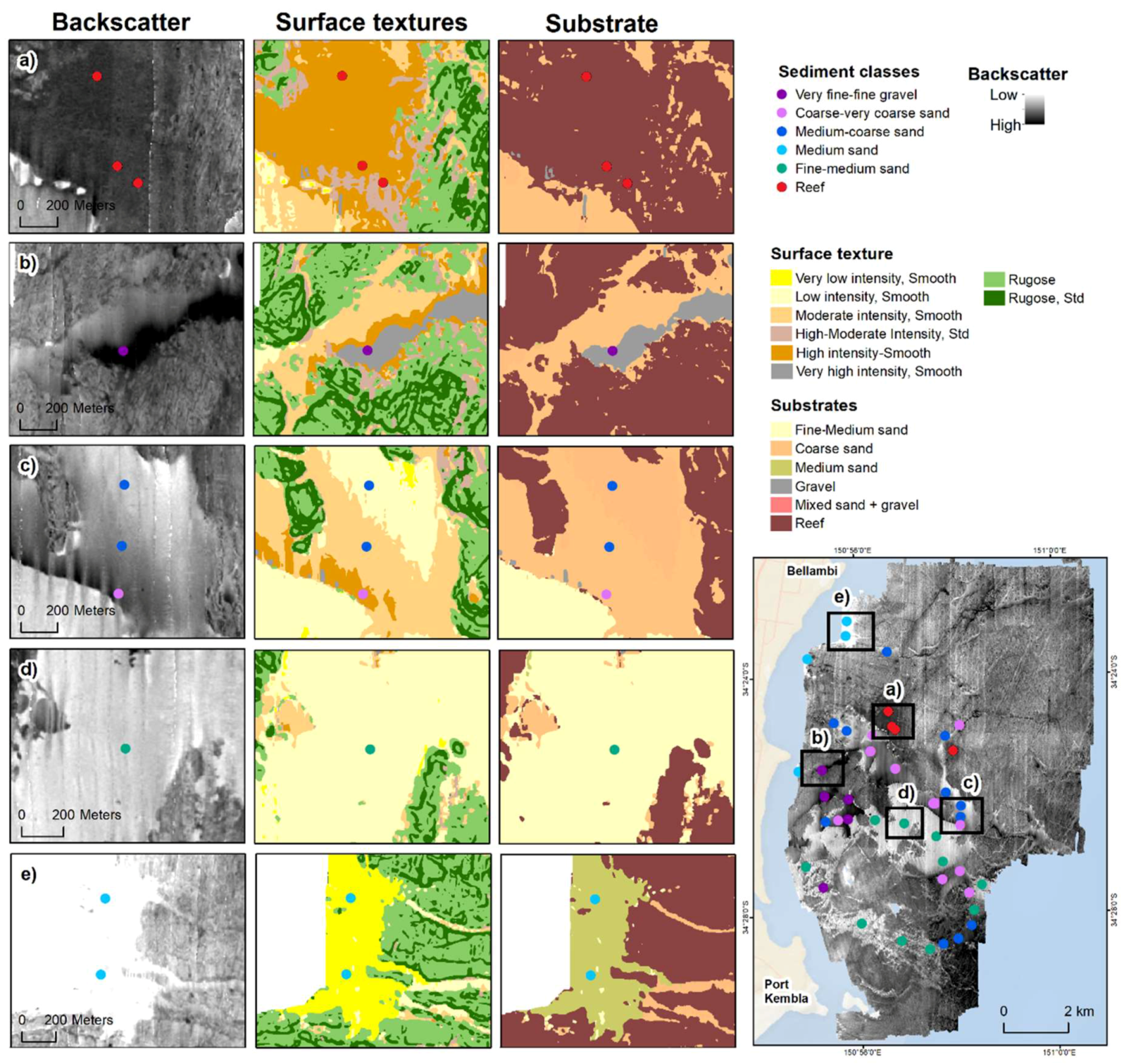
4.2.1. Wollongong Case Study Area
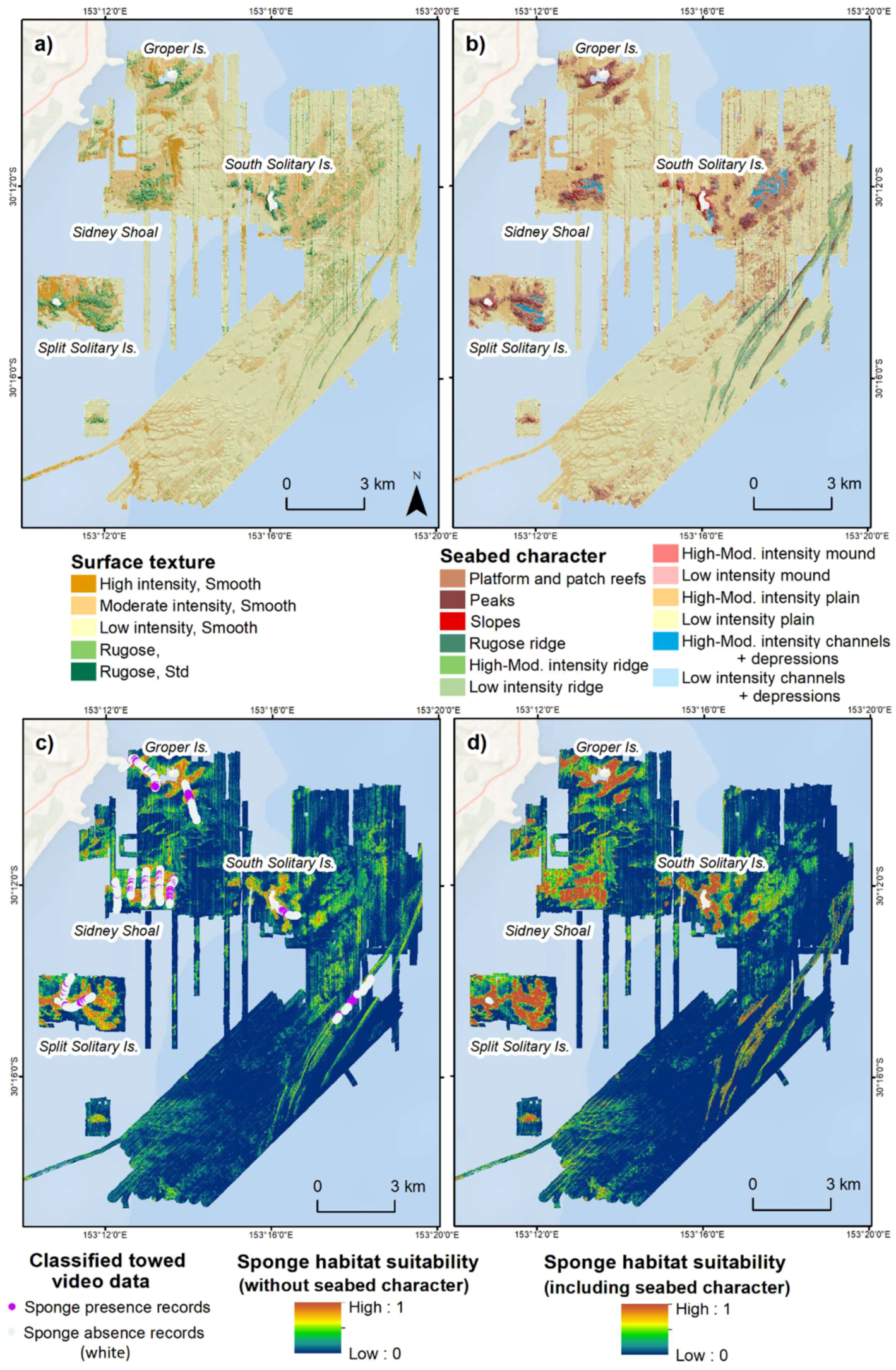
4.2.2. South Solitary Islands Case Study Area
4.3. Applications for Coastal and Marine Management
5. Conclusions
- Development of a new semi-automated method for classifying seabed landforms which provides an informative product of seabed morphology;
- Presentation of example methodologies for substrate and habitat classifications which vary depending on the availability and characteristics of ground-truthing data;
- Integration of landform and substrate classifications to produce seabed character and geomorphology maps which generalise the nature of the seabed, with inferences on feature origin where appropriate;
- Creation of a consistent methodology which can be effectively applied to new MBES and marine LiDAR data, in addition to the repository of bathymetric data collected by OEH and comparable survey areas elsewhere. The method described is suitable for 5-m DEMs as inputs, and the framework is scalable to finer or coarser resolution data as needed.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Term | Definition | Source |
| Channel | A linear or sinuous depression on an otherwise flat surface | [42] |
| Crevice | A narrow opening or fissure, especially in a rock or wall | Term in [40], definition from Oxford Dictionary 2018 |
| Depression | A low-lying area surrounded by higher ground and with no outlet or opening (i.e., closed) | [42] |
| Moat | An annular depression that may or may not be continuous, located at the base of many seamounts or islands | [37] |
| Mound | A low, rounded natural hill of unspecified origin, which is generally less than 3 metres high and composed of earthy material | [39] |
| Patch | Individual outcrops with circular or oblong shapes and vertical reliefs of one meter or more in relation to the surrounding seafloor. These outcrops are isolated from other outcrop features | Term in [40], modified from ‘Patch coral reef’ definition in [39] |
| Peak | A conical or pointed elevation at the summit of a larger feature. | [37] |
| Plain | Any land with a flat or very slightly undulating surface. A flat, gently sloping or nearly level region of the seafloor | [38] |
| Platform | An elevated, level, or nearly level surface bound by a descending slope on all sides. | [42] |
| Term (cont’d) | Definition (cont’d) | Source (cont’d) |
| Ridge | A long, narrow elevation, usually sharp crested with steep sides. Larger ridges can form an extended upland between valleys | [42] |
| Slope | An inclined surface or line. The degree of inclination to the horizontal. Usually expressed as a ratio | [38] |
| Trough | A long depression generally wide and flat bottomed with symmetrical and parallel sides | [37] |
Appendix C
References
- Brown, C.J.; Sameoto, J.A.; Smith, S.J. Multiple methods, maps, and management applications: Purpose made seafloor maps in support of ocean management. J. Sea Res. 2012, 72, 1–13. [Google Scholar] [CrossRef]
- Cogan, C.B.; Todd, B.J.; Lawton, P.; Noji, T.T. The role of marine habitat mapping in ecosystem-based management. ICES J. Mar. Sci. 2009, 66, 2033–2042. [Google Scholar] [CrossRef]
- McArthur, M.A.; Brooke, B.P.; Przeslawski, R.; Ryan, D.A.; Lucieer, V.L.; Nichol, S.L.; McCallum, A.W.; Mellin, C.; Cresswell, I.D.; Radke, L.C. On the use of abiotic surrogates to describe marine benthic biodiversity. Estuar. Coast. Shelf Sci. 2010, 88, 21–32. [Google Scholar] [CrossRef]
- Rees, M.J.; Knott, N.A.; Neilson, J.; Linklater, M.; Osterloh, I.; Jordan, A.; Davis, A.R. Accounting for habitat structural complexity improves the assessment of performance in no-take marine reserves. Biol. Conserv. 2018, 224, 100–110. [Google Scholar] [CrossRef]
- Huang, Z.; Brooke, B.P.; Harris, P.T. A new approach to mapping marine benthic habitats using physical environmental data. Cont. Shelf Res. 2011, 31, S4–S16. [Google Scholar] [CrossRef]
- Harris, P.T.; Baker, E.K. Seafloor Geomorphology as Benthic Habitat: GeoHAB Atlas of Seafloor Geomorphic Features and Benthic Habitats; Elsevier Science: Burlington, NJ, USA, 2012; p. 947. [Google Scholar]
- Andersen, J.H.; Manca, E.; Agnesi, S.; Al-Hamdani, Z.; Lillis, H.; Mo, G.; Populus, J.; Reker, J.; Tunesi, L.; Vasquez, M. European broad-scale seabed habitat maps support implementation of ecosystem-based management. Open J. Ecol. 2018, 8, 86–103. [Google Scholar] [CrossRef]
- Harris, P.T.; Whiteway, T. High seas marine protected areas: Benthic environmental conservation priorities from a GIS analysis of global ocean biophysical data. Ocean Coast. Manag. 2009, 52, 22–38. [Google Scholar] [CrossRef]
- Moore, C.; Drazen, J.C.; Radford, B.T.; Kelley, C.; Newman, S.J. Improving essential fish habitat designation to support sustainable ecosystem-based fisheries management. Mar. Policy 2016, 69, 32–41. [Google Scholar] [CrossRef]
- Huang, Z.; McArthur, M.; Przeslawski, R.; Siwabessy, J.; Nichol, S.; Brooke, B. Predictive mapping of soft-bottom benthic biodiversity using a surrogacy approach. Mar. Freshw. Res. 2014, 65, 409–424. [Google Scholar] [CrossRef]
- Hanslow, D.J.; Dela-Cruz, J.; Morris, B.D.; Kinsela, M.A.; Foulsham, E.; Linklater, M.; Pritchard, T.R. Regional scale coastal mapping to underpin strategic land use planning in southeast Australia. J. Coast. Res. 2016, 75, 987–991. [Google Scholar] [CrossRef]
- Kinsela, M.A.; Morris, B.D.; Linklater, M.; Hanslow, D.J. Second-pass assessment of potential exposure to shoreline change in New South Wales, Australia, using a sediment compartments framework. J. Mar. Sci. Eng. 2017, 5, 61. [Google Scholar] [CrossRef]
- Wilson, J.P. Digital terrain modeling. Geomorphology 2012, 137, 107–121. [Google Scholar] [CrossRef]
- Mayer, L.; Jakobsson, M.; Allen, G.; Dorschel, B.; Falconer, R.; Ferrini, V.; Lamarche, G.; Snaith, H.; Weatherall, P. The Nippon Foundation—GEBCO seabed 2030 project: The quest to see the world’s oceans completely mapped by 2030. Geosciences 2018, 8, 63. [Google Scholar] [CrossRef]
- Lecours, V.; Dolan, M.F.; Micallef, A.; Lucieer, V.L. A review of marine geomorphometry, the quantitative study of the seafloor. Hydrol. Earth Syst. Sci. 2016, 20, 3207. [Google Scholar] [CrossRef]
- Freeman, F. National Hydrography and the Influence of Climate Change. In Proceedings of the HYDRO18, Pyrmont, NSW, Australia, 30th October–1st November 2018. [Google Scholar]
- Diesing, M.; Green, S.L.; Stephens, D.; Lark, R.M.; Stewart, H.A.; Dove, D. Mapping seabed sediments: Comparison of manual, geostatistical, object-based image analysis and machine learning approaches. Cont. Shelf Res. 2014, 84, 107–119. [Google Scholar] [CrossRef]
- Evans, I.S. Geomorphometry and landform mapping: What is a landform? Geomorphology 2012, 137, 94–106. [Google Scholar] [CrossRef]
- Finkl, C.W.; Makowski, C. Autoclassification versus cognitive interpretation of digital bathymetric data in terms of geomorphological features for seafloor characterization. J. Coast. Res. 2014, 31, 1–16. [Google Scholar]
- Pike, R.J. Geomorphometry-diversity in quantitative surface analysis. Prog. Phys. Geogr. 2000, 24, 1–20. [Google Scholar]
- Lucieer, V.; Lecours, V.; Dolan, M.F.J. Charting the course for future developments in marine geomorphometry: An introduction to the special issue. Geosciences 2018, 8, 477. [Google Scholar] [CrossRef]
- Diesing, M.; Mitchell, P.; Stephens, D. Image-based seabed classification: What can we learn from terrestrial remote sensing? ICES J. Mar. Sci. 2016, 73, 2425–2441. [Google Scholar] [CrossRef]
- Porskamp, P.; Rattray, A.; Young, M.; Ierodiaconou, D. Multiscale and hierarchical classification for benthic habitat mapping. Geosciences 2018, 8, 119. [Google Scholar] [CrossRef]
- Misiuk, B.; Lecours, V.; Bell, T. A multiscale approach to mapping seabed sediments. PLoS ONE 2018, 13, e0193647. [Google Scholar] [CrossRef] [PubMed]
- Wilson, M.F.J.; O’Connell, B.; Brown, C.; Guinan, J.C.; Grehan, A.J. Multiscale terrain analysis of multibeam bathymetry data for habitat mapping on the continental slope. Mar. Geod. 2007, 30, 3–35. [Google Scholar] [CrossRef]
- Walbridge, S.; Slocum, N.; Pobuda, M.; Wright, D.J. Unified geomorphological analysis workflows with Benthic Terrain Modeler. Geosciences 2018, 8, 94. [Google Scholar] [CrossRef]
- Evans, J.; Oakleaf, J.; Cushman, S. An ArcGIS Toolbox for Surface Gradient and Geomorphometric Modeling, Version 2.0-0. Available online: https://github.com/jeffreyevans/GradientMetric (accessed on 27 January 2019).
- Picard, K.; Brooke, B.P.; Harris, P.T.; Siwabessy, P.J.; Coffin, M.F.; Tran, M.; Spinoccia, M.; Weales, J.; Macmillan-Lawler, M.; Sullivan, J. Malaysia Airlines flight MH370 search data reveal geomorphology and seafloor processes in the remote southeast Indian Ocean. Mar. Geol. 2018, 395, 301–319. [Google Scholar] [CrossRef]
- Harris, P.T.; Macmillan-Lawler, M.; Rupp, J.; Baker, E.K. Geomorphology of the oceans. Mar. Geol. 2014, 352, 4–24. [Google Scholar] [CrossRef]
- Pike, R.J.; Evans, I.; Hengl, T. Geomorphometry: A brief guide. Dev. Soil Sci. 2009, 33, 3–30. [Google Scholar]
- Diaz, R.J.; Solan, M.; Valente, R.M. A review of approaches for classifying benthic habitats and evaluating habitat quality. J. Environ. Manag. 2004, 73, 165–181. [Google Scholar] [CrossRef]
- Bax, N.J.; Williams, A. Seabed habitat on the south-eastern Australian continental shelf: Context, vulnerability and monitoring. Mar. Freshw. Res. 2001, 52, 491–512. [Google Scholar] [CrossRef]
- Greene, H.G.; Yoklavich, M.M.; Starr, R.M.; O’Connell, V.M.; Wakefield, W.W.; Sullivan, D.E.; McRea, J.E., Jr.; Cailliet, G.M. A classification scheme for deep seafloor habitats. Oceanol. Acta 1999, 22, 663–678. [Google Scholar] [CrossRef]
- Last, P.R.; Lyne, V.D.; Williams, A.; Davies, C.R.; Butler, A.J.; Yearsley, G.K. A hierarchical framework for classifying seabed biodiversity with application to planning and managing Australia’s marine biological resources. Biol. Conserv. 2010, 143, 1675–1686. [Google Scholar] [CrossRef]
- Guarinello, M.; Shumchenia, E.; King, J. Marine habitat classification for ecosystem-based management: A proposed hierarchical framework. Environ. Manag. 2010, 45, 793–806. [Google Scholar] [CrossRef] [PubMed]
- Mumby, P.J.; Harborne, A.R. Development of a systematic classification scheme of marine habitats to facilitate regional management and mapping of Caribbean coral reefs. Biol. Conserv. 1999, 88, 155–163. [Google Scholar] [CrossRef]
- International Hydrographic Organisation (IHO). Standardization of Undersea Feature Names: Guidelines, Proposal Form, Terminology, 4th ed.; Bathymetric Publication No.6; International Hydrographic Bureau: Monaco, French, 2013; p. 38. [Google Scholar]
- International Hydrographic Organisation (IHO). Hydrographic Dictionary; International Hydrographic Bureau: Monaco, French, 1995; p. 281. [Google Scholar]
- Federal Geographic Data Committee. Coastal and Marine Ecological Classification Standard; Marine and Coastal Spatial Data Subcommittee, Federal Geographic Data Committee: Reston, VA, USA, 2012; p. 353. [Google Scholar]
- Dove, D.; Bradwell, T.; Carter, G.; Cotterill, C.; Gafeira Goncalves, J.; Green, S.; Krabbendam, M.; Mellett, C.; Stevenson, A.; Stewart, H. Seabed Geomorphology: A Two-Part Classification System; British Geological Survey: Edinburgh, UK, 2016; p. 19. [Google Scholar]
- Jasiewicz, J.; Stepinski, T.F. Geomorphons—A pattern recognition approach to classification and mapping of landforms. Geomorphology 2013, 182, 147–156. [Google Scholar] [CrossRef]
- Nichol, S.; Huang, Z.; Howard, F.; Porter-Smith, R.; Lucieer, V.L.; Barrett, N. Geomorphological Classification of Reefs–Draft Framework for an Australian Standard; Report to the National Environmental Science Program, Marine Biodiversity Hub.; Geoscience Australia: Canberra, Australia, 2016; p. 27. [Google Scholar]
- Masetti, G.; Mayer, L.A.; Ward, L.G. A bathymetry-and reflectivity-based approach for seafloor segmentation. Geosciences 2018, 8, 14. [Google Scholar] [CrossRef]
- Butler, C.; Lucieer, V.; Walsh, P.; Flukes, E.; Johnson, C. Seamap Australia [Version 1.0] the Development of a National Benthic Marine Classification Scheme for the Australian Continental Shelf; Institute for Marine and Antarctic Studies: Tasmania, Australia, 2017; p. 52. [Google Scholar]
- Jordan, A.; Davies, P.; Ingleton, T.; Mesley, E.; Neilson, J.; Pritchard, T.R. Seabed Habitat Mapping of the Continental Shelf of NSW; NSW Department of Environment, Climate Change and Water: Sydney, Australia, 2010; p. 206. [Google Scholar]
- Lucieer, V.; Lawler, M.; Pender, A.; Morffew, M. Seamap Tasmania–Mapping the Gaps; Marine Research Laboratories—Tasmanian Aquaculture and Fisheries Institute, University of Tasmania: Tasmania, Australia, 2009; p. 195. [Google Scholar]
- Edmunds, M.; Flynn, A. A Victorian Marine Biotope Classification Scheme; Report to Deakin University and Parks Victoria, Australian Marine Ecology Report; Deakin University: Melbourne, Australia, 2015. [Google Scholar]
- Combined Biotope Classification Scheme (CBiCS). Available online: http://www.cbics.org/ (accessed on 27 January 2019).
- Queensland Department of Environment and Science: Queensland Intertidal and Subtidal Ecosystem Classification Scheme. Available online: https://wetlandinfo.des.qld.gov.au/wetlands/what-are-wetlands/definitions-classification/classification-systems-background/intertidal-subtidal (accessed on 27 January 2019).
- Office of Environment and Heritage: NSW Subtidal Marine Habitat Data. Available online: https://datasets.seed.nsw.gov.au/dataset/nsw-marine-habitat-data (accessed on 27 January 2019).
- Office of Environment and Heritage: NSW Coastal Nearshore Reef Extent 2017. Available online: https://datasets.seed.nsw.gov.au/dataset/nsw-nearshore-coastal-reef-extent-2017 (accessed on 27 January 2019).
- Marine Estate Management Authority. Hawkesbury Shelf Marine Bioregion discussion paper: Part 2; Marine Estate Management Authority: Nelson Bay, NSW, Australia, 2018; p. 96. [Google Scholar]
- NSW Marine Parks Authority. Solitary Islands Marine Park: Zoning Plan Review Report; NSW Marine Parks Authority: Coffs Harbour, Nelson Bay, NSW, Australia, 2009; p. 129. [Google Scholar]
- Malcolm, H.A.; Jordan, A.; Smith, S.D. Testing a depth-based habitat classification system against reef fish assemblage patterns in a subtropical marine park. Aquat. Conserv. Mar. Freshw. Ecosyst. 2011, 21, 173–185. [Google Scholar] [CrossRef]
- Malcolm, H.A.; Jordan, A.; Schultz, A.L.; Smith, S.D.; Ingleton, T.; Foulsham, E.; Linklater, M.; Davies, P.; Ferrari, R.; Hill, N. Integrating seafloor habitat mapping and fish assemblage patterns improves spatial management planning in a marine park. J. Coast. Res. 2016, 75, 1292–1296. [Google Scholar] [CrossRef]
- Office of Environment and Heritage (OEH). Coastal Management. Available online: https://www.environment.nsw.gov.au/topics/water/coasts/coastal-management (accessed on 21 August 2018).
- McPherson, A.; Hazelwood, M.; Moore, D.; Owen, K.; Nichol, S.; Howard, F. The Australian Coastal Sediment Compartments Project: Methodology and Product Development; Geoscience Australia: Canberra, Australia, 2015. [Google Scholar]
- Thom, B.G.; Eliot, I.; Eliot, M.; Harvey, N.; Rissik, D.; Sharples, C.; Short, A.D.; Woodroffe, C.D. National sediment compartment framework for Australian coastal management. Ocean Coast. Manag. 2018, 154, 103–120. [Google Scholar] [CrossRef]
- Hanslow, D.J.; Cajelot, B. Bridging the gap in a state-wide coastal dataset. In Proceedings of the HYDRO18, Pyrmont, Sydney, NSW, Australia, 30 October–1 November 2018. [Google Scholar]
- Hanslow, D.J.; Morris, B.D.; Foulsham, E.; Kinsela, M.A. A regional scale approach to assessing current and potential future exposure to tidal inundation in different types of estuaries. Sci. Rep. 2018, 8, 7065. [Google Scholar] [CrossRef] [PubMed]
- Kinsela, M.A.; Morris, B.D.; Daley, M.J.; Hanslow, D.J. A flexible approach to forecasting coastline change on wave-dominated beaches. J. Coast. Res. 2016, 75, 952–956. [Google Scholar] [CrossRef]
- Linklater, M.; Carroll, A.G.; Hamylton, S.M.; Jordan, A.R.; Brooke, B.P.; Nichol, S.L.; Woodroffe, C.D. High coral cover on a mesophotic, subtropical island platform at the limits of coral reef growth. Cont. Shelf Res. 2016, 130, 34–46. [Google Scholar] [CrossRef]
- Ferrari, R.; Malcolm, H.A.; Byrne, M.; Friedman, A.; Williams, S.B.; Schultz, A.; Jordan, A.R.; Figueira, W.F. Habitat structural complexity metrics improve predictions of fish abundance and distribution. Ecography 2018, 41, 1077–1091. [Google Scholar] [CrossRef]
- Lean, J.; Peat, C. Offshore Geophysical and Geological Investigations between Wollongong Head and Port Kembla; Geological Survey of New South Wales: Maitland, Australia, 1972. [Google Scholar]
- Roy, P.; Stephens, A. Geological controls on process-response, SE Australia. In Proceedings of the 17th International Conference on Coastal Engineering, Sydney, Australia, 23–28 March 1980; pp. 913–933. [Google Scholar]
- Roy, P.; Thom, B. Late quaternary marine deposition in New South Wales and Southern Queensland—An evolutionary model. J. Geol. Soc. Aust. 1981, 28, 471–489. [Google Scholar] [CrossRef]
- Lundblad, E.R.; Wright, D.J.; Miller, J.; Larkin, E.M.; Rinehart, R.; Naar, D.F.; Donahue, B.T.; Anderson, S.M.; Battista, T. A benthic terrain classification scheme for American Samoa. Mar. Geod. 2006, 29, 89–111. [Google Scholar] [CrossRef]
- Lecours, V.; Devillers, R.; Simms, A.E.; Lucieer, V.L.; Brown, C.J. Towards a framework for terrain attribute selection in environmental studies. Environ. Model. Softw. 2017, 89, 19–30. [Google Scholar] [CrossRef]
- Lamarche, G.; Lurton, X. Recommendations for improved and coherent acquisition and processing of backscatter data from seafloor-mapping sonars. Mar. Geophys. Res. 2018, 39, 5–22. [Google Scholar] [CrossRef]
- Carvalho, R.; Kinsela, M.; Hanslow, D.; Hamylton, S.; Linklater, M.; Ingleton, T.; Morris, B.; Allen, K.; Woodroffe, C. Identifying sediment compartment dynamics on the Illawarra coast. In Proceedings of the 26th NSW Coastal Conference, Port Stephens, NSW, Australia, 8–10 November 2017; pp. 1–13. [Google Scholar]
- Kinsela, M.A.; Carvalho, R.; Ingleton, T.C.; Linklater, M.; Allen, K.M.; Morris, B.D.; Hanslow, D.J.; Woodroffe, C.D. Revealing the contrasting seabed of two adjacent sediment compartments and potential implications for beach response. In Proceedings of the 27th NSW Coastal Conference, Merimbula, NSW, Australia, 7–9 November 2018. [Google Scholar]
- Johnson, S.Y.; Cochrane, G.R.; Golden, N.E.; Dartnell, P.; Hartwell, S.R.; Cochran, S.A.; Watt, J.T. The California Seafloor and Coastal Mapping Program–providing science and geospatial data for California’s state waters. Ocean Coast. Manag. 2017, 140, 88–104. [Google Scholar] [CrossRef]
- Phillips, S.J.; Dudík, M.; Schapire, R.E. Maxent Software for Modeling Species Niches and Distributions (Version 3.4.1). Available online: https://biodiversityinformatics.amnh.org/open_source/maxent/ (accessed on 27 January 2019).
- Phillips, S.J.; Dudík, M. Modeling of species distributions with maxent: New extensions and a comprehensive evaluation. Ecography 2008, 31, 161–175. [Google Scholar] [CrossRef]
- Phillips, S.J.; Anderson, R.P.; Schapire, R.E. Maximum entropy modeling of species geographic distributions. Ecol. Model. 2006, 190, 231–259. [Google Scholar] [CrossRef]
- Merow, C.; Smith, M.J.; Silander, J.A. A practical guide to maxent for modeling species’ distributions: What it does, and why inputs and settings matter. Ecography 2013, 36, 1058–1069. [Google Scholar] [CrossRef]
- Linklater, M. Past and Present Coral Distribution at the Latitudinal Limit of reef Development, Southwest Pacific Ocean. Ph.D. Thesis, University of Wollongong, New South Wales, Australia, 2016. [Google Scholar]
- Smith, M.J.; Clark, C.D. Methods for the visualization of digital elevation models for landform mapping. Earth Surf. Process. Landf. 2005, 30, 885–900. [Google Scholar] [CrossRef]
- Roy, P.S. Inner Continental Shelf Sand Deposits: SE Australia; University of Sydney Institute of Marine Science and School of Geosciences: Sydney, Australia, 2006; p. 170. [Google Scholar]
- Geological Survey of NSW. Geology of the Wollongong, Kiama and Robertson 1:50 000 Sheets; Geological Survey of NSW: Maitland, Australia, 1974. [Google Scholar]
- Thom, B.G.; Keene, J.B.; Cowell, P.J.; Daley, M. East Australian marine abrasion surface. Geol. Soc. Lond. Spec. Publ. 2010, 346, 57–69. [Google Scholar] [CrossRef]
- White, J.D.; Ross, P.-S. Maar-diatreme volcanoes: A review. J. Volcanol. Geotherm. Res. 2011, 201, 1–29. [Google Scholar] [CrossRef]
- Herbert, C. The Geology of the SYDNEY 1:100,000 Sheet; NSW Resources and Geoscience: Maitland, Australia, 1983; p. 229. [Google Scholar]
- Branagan, D. The Sydney Basin and its vanished sequence. J. Geol. Soc. Aust. 1983, 30, 75–84. [Google Scholar] [CrossRef]
- Crawford, E.; Herbert, C.; Taylor, G.; Helby, R.; Morgan, R.; Ferguson, J. Diatremes of the Sydney Basin. In A Guide to the Sydney Basin Eds. Herbert & Helby; National Library of Australia: Canberra, Australia, 1980. [Google Scholar]
- Becker, L.; Poreda, R.; Basu, A.; Pope, K.; Harrison, T.; Nicholson, C.; Iasky, R. Bedout: A possible end-Permian impact crater offshore of northwestern Australia. Science 2004, 304, 1469–1476. [Google Scholar] [CrossRef]
- Lajeunesse, P.; Duchesne, M.J.; St-Onge, G.; Locat, J.; Higgins, M.; Sanfaçon, R.; Ortiz, J. The Corossol structure: A glaciated crater of possible impact origin in the northwestern Gulf of St Lawrence, eastern Canada. Geol. Soc. Lond. Mem. 2016, 46, 127–128. [Google Scholar] [CrossRef]
- Shoemaker, E.; MacDonald, F.; Shoemaker, C. Geology of five small Australian impact craters. Aust. J. Earth Sci. 2005, 52, 529–544. [Google Scholar] [CrossRef]
- Schultz, A.L.; Malcolm, H.A.; Linklater, M.; Jordan, A.R.; Ingleton, T.; Smith, S.D. Sediment variability affects fish community structure in unconsolidated habitats of a subtropical marine park. Mar. Ecol. Prog. Ser. 2015, 532, 213–226. [Google Scholar] [CrossRef]
- Brooke, B.P.; Nichol, S.L.; Huang, Z.; Beaman, R.J. Palaeoshorelines on the Australian continental shelf: Morphology, sea-level relationship and applications to environmental management and archaeology. Cont. Shelf Res. 2017, 134, 26–38. [Google Scholar] [CrossRef]
- Passos, T.U.; Webster, J.M.; Braga, J.C.; Voelker, D.; Renema, W.; Beaman, R.J.; Nothdurft, L.D.; Hinestrosa, G.; Clarke, S.; Yokoyama, Y.; et al. Paleoshorelines and lowstand sedimentation on subtropical shelves: A case study from the Fraser shelf, Australia. Aust. J. Earth Sci. 2019. [Google Scholar] [CrossRef]
- Woodroffe, C.D.; Brooke, B.P.; Linklater, M.; Kennedy, D.M.; Jones, B.G.; Buchanan, C.; Mleczko, R.; Hua, Q.; Zhao, J. Response of coral reefs to climate change: Expansion and demise of the southernmost Pacific coral reef. Geophys. Res. Lett. 2010, 37. [Google Scholar] [CrossRef]
- Linklater, M.; Brooke, B.P.; Hamylton, S.M.; Nichol, S.L.; Woodroffe, C.D. Submerged fossil reefs discovered beyond the limit of modern reef growth in the Pacific Ocean. Geomorphology 2015, 246, 579–588. [Google Scholar] [CrossRef]
- Veron, J.; Done, T. Corals and coral communities of Lord Howe Island. Aust. J. Mar. Freshw. Res. 1979, 30, 203–236. [Google Scholar] [CrossRef]
- Veron, J.; How, R.; Done, T.; Zell, L.; Dodkin, M.; O’Farrell, A. Corals of the Solitary Islands, New South Wales. Mar. Freshw. Res. 1974, 25, 193–208. [Google Scholar] [CrossRef]
- Harriott, V.J.; Smith, S.D.A.; Harrison, P.L. Patterns of coral community structure of subtropical reefs in the Solitary Islands marine reserve, eastern Australia. Mar. Ecol. Prog. Ser. 1994, 109, 67–76. [Google Scholar] [CrossRef]
- Huang, Z.; Nichol, S.L.; Siwabessy, J.P.; Daniell, J.; Brooke, B.P. Predictive modelling of seabed sediment parameters using multibeam acoustic data: A case study on the Carnarvon shelf, western Australia. Int. J. Geogr. Inf. Sci. 2012, 26, 283–307. [Google Scholar] [CrossRef]
- Hamylton, S. Five practical uses of spatial autocorrelation for studies of coral reef ecology. Mar. Ecol. Prog. Ser. 2013, 478, 15–25. [Google Scholar] [CrossRef]
- Cowell, P.J.; Stive, M.J.; Niedoroda, A.W.; Swift, D.J.; de Vriend, H.J.; Buijsman, M.C.; Nicholls, R.J.; Roy, P.S.; Kaminsky, G.M.; Cleveringa, J. The coastal-tract (part 2): Applications of aggregated modeling of lower-order coastal change. J. Coast. Res. 2003, 19, 828–848. [Google Scholar]
- Gray, M. Geodiversity: Valuing and Conserving Abiotic Nature; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Serrano, E.; Ruiz-Flaño, P. Geodiversity: A theoretical and applied concept. Geogr. Helv. 2018, 62, 140–147. [Google Scholar] [CrossRef]
| Variable | Description and Parameters | Unit | Tool |
|---|---|---|---|
| Slope | Gradient (0–90°) within a fixed 3 x 3 window | Degrees | ArcGIS |
| Aspect | Direction (0–360°) within a fixed 3 x 3 window | Degrees | ArcGIS |
| Range | Difference between largest and smallest value within a user-defined window (3 cell radius) | Metres | ArcGIS |
| Standard deviation | Standard deviation of cells within a user-defined window (3 cell radius) | Metres | ArcGIS |
| Curvature | Convex or concave profile of a surface within a 3 × 3 window, where: +ve = convex; -ve = concave; 0 = flat | Degrees per 100 m | ArcGIS |
| Isobaths | Contour lines derived from terrain (1 m intervals) | m | ArcGIS |
| Eastness | Sine-transformed aspect (°) for statistical uses where due east is 1 and due west is 0 | Unitless | BTM |
| Northness | Cosine-transformed aspect (°) for statistical uses where due north is 1 and due south is 0 | Unitless | BTM |
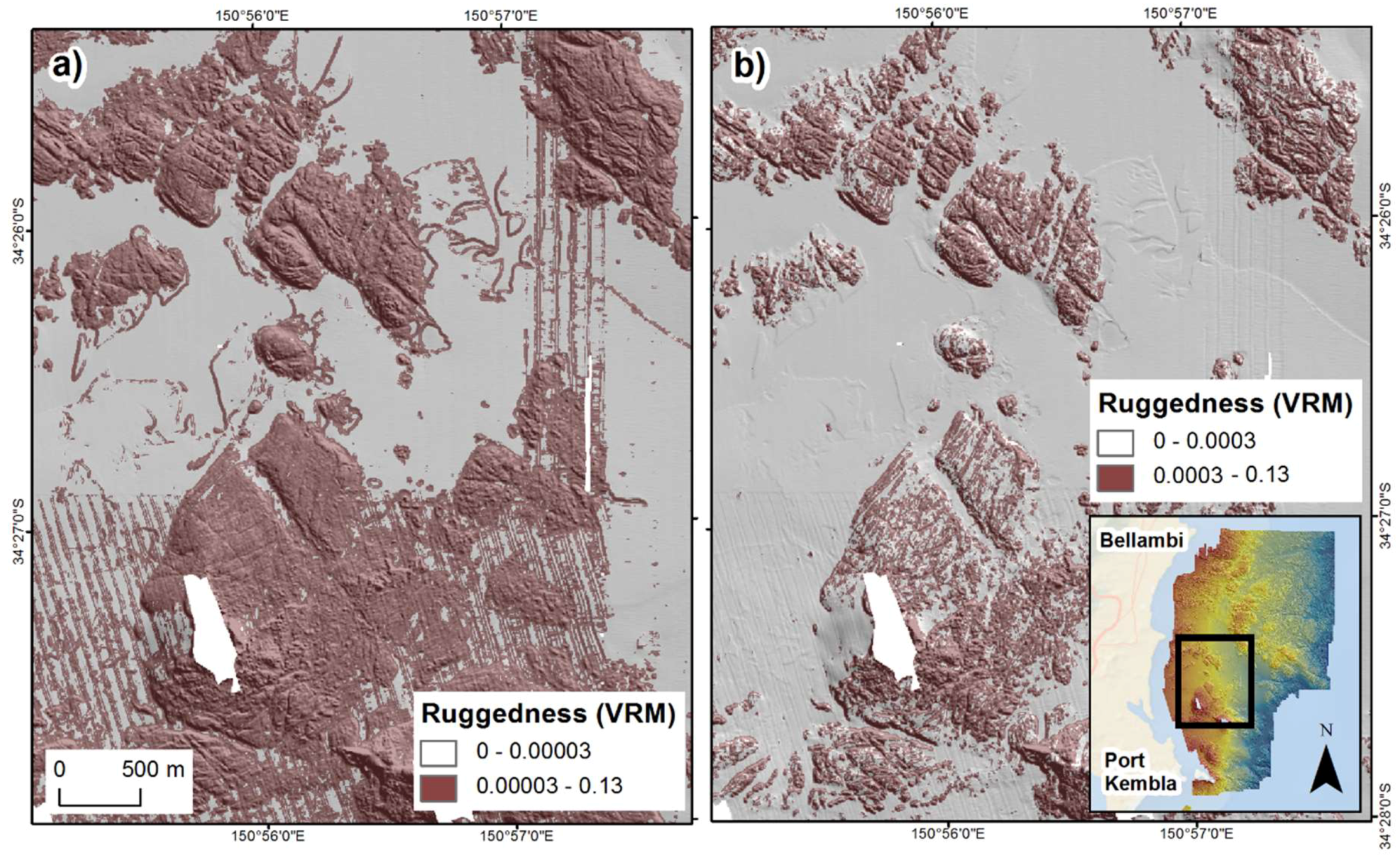
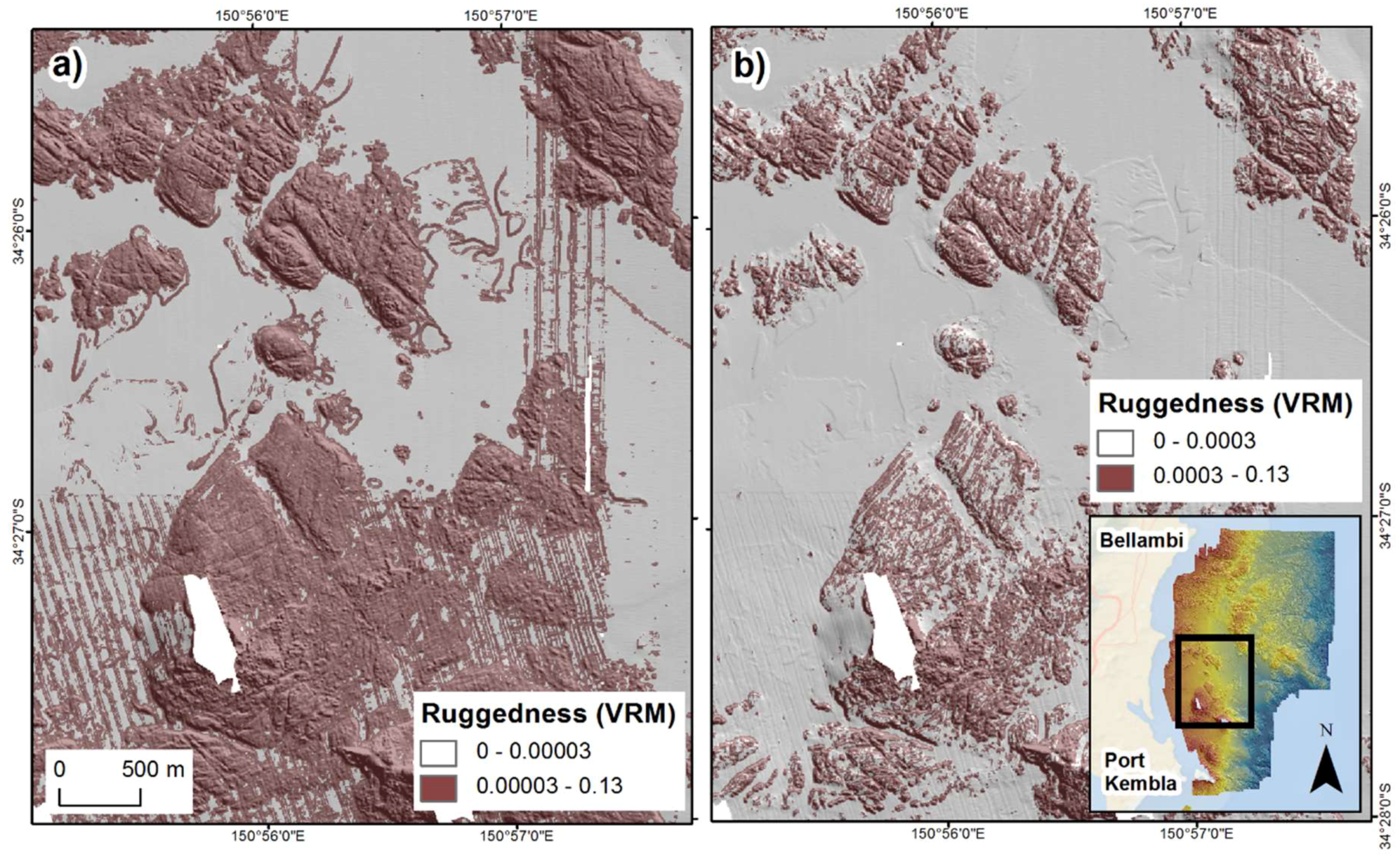
| Ruggedness (VRM) | Variation in 3D orientation of cells within a user-defined window (3 cell radius) | Unitless | BTM |
| Topographic Position Index | Topographic position relative to the average of surrounding cells within a user-defined window (150 and 27 cell radii), where: +ve = relative high; -ve = relative low; 0 = flat | Unitless | GGMT |
| Elements | Landforms | Substrate | Character | Geomorphology |
|---|---|---|---|---|
| Broadscale high | Platform | Mud | Platform and patch reefs | Abraded platform |
| Broadscale plane | Peak | Fine sand | Reef peaks | Paleochannel |
| Broadscale low | Slope | Medium sand | Reef slopes | Sand sheet |
| Finescale high | Patch | Coarse sand | Mixed-substrate mounds and ridges | Crater |
| Finescale plane | Ridge | Gravel | Sandy plain | |
| Finescale low | Mound | Reef | Gravelly plain | |
| Slope | Plain | Reefal plain | ||
| Rugose | Channel | Sandy channels and depressions | ||
| Smooth | Trough | Gravelly channels and depressions | ||
| Crevice | Reef channels and depressions | |||
| Depression | ||||
| Moat |
| Surface Elements | Broad TPI | Fine TPI | Slope | Ruggedness | ||||
|---|---|---|---|---|---|---|---|---|
| Lower | Upper | Lower | Upper | Lower | Upper | Lower | Upper | |
| Slopes | 10 | |||||||
| Broadscale High Rugose Max | 200 | 10 | ||||||
| Finescale High Rugose | 50 | 10 | 0.0003 | |||||
| Broadscale High Rugose | 20 | 200 | 50 | 10 | 0.0003 | |||
| Finescale High Smooth | 50 | 10 | 0.0003 | |||||
| Broadscale High Smooth | 20 | 200 | 50 | 10 | 0.0003 | |||
| Finescale Low Smooth | −100 | 10 | 0.0003 | |||||
| Broadscale Low Smooth | −50 | −100 | 10 | 0.0003 | ||||
| Finescale Low Rugose | −100 | 0.0003 | ||||||
| Broadscale Low Rugose | −50 | −100 | 0.0003 | |||||
| Plane Smooth | −50 | −100 | 10 | 0.0003 | ||||
| Plane Rugose | −50 | −100 | 10 | 0.0003 | ||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Linklater, M.; Ingleton, T.C.; Kinsela, M.A.; Morris, B.D.; Allen, K.M.; Sutherland, M.D.; Hanslow, D.J. Techniques for Classifying Seabed Morphology and Composition on a Subtropical-Temperate Continental Shelf. Geosciences 2019, 9, 141. https://doi.org/10.3390/geosciences9030141
Linklater M, Ingleton TC, Kinsela MA, Morris BD, Allen KM, Sutherland MD, Hanslow DJ. Techniques for Classifying Seabed Morphology and Composition on a Subtropical-Temperate Continental Shelf. Geosciences. 2019; 9(3):141. https://doi.org/10.3390/geosciences9030141
Chicago/Turabian StyleLinklater, Michelle, Timothy C. Ingleton, Michael A. Kinsela, Bradley D. Morris, Katie M. Allen, Michael D. Sutherland, and David J. Hanslow. 2019. "Techniques for Classifying Seabed Morphology and Composition on a Subtropical-Temperate Continental Shelf" Geosciences 9, no. 3: 141. https://doi.org/10.3390/geosciences9030141
APA StyleLinklater, M., Ingleton, T. C., Kinsela, M. A., Morris, B. D., Allen, K. M., Sutherland, M. D., & Hanslow, D. J. (2019). Techniques for Classifying Seabed Morphology and Composition on a Subtropical-Temperate Continental Shelf. Geosciences, 9(3), 141. https://doi.org/10.3390/geosciences9030141