The Impact of Acoustic Imaging Geometry on the Fidelity of Seabed Bathymetric Models


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Multibeam Imaging Geometry
3. Component Contributors to Resolution Limits
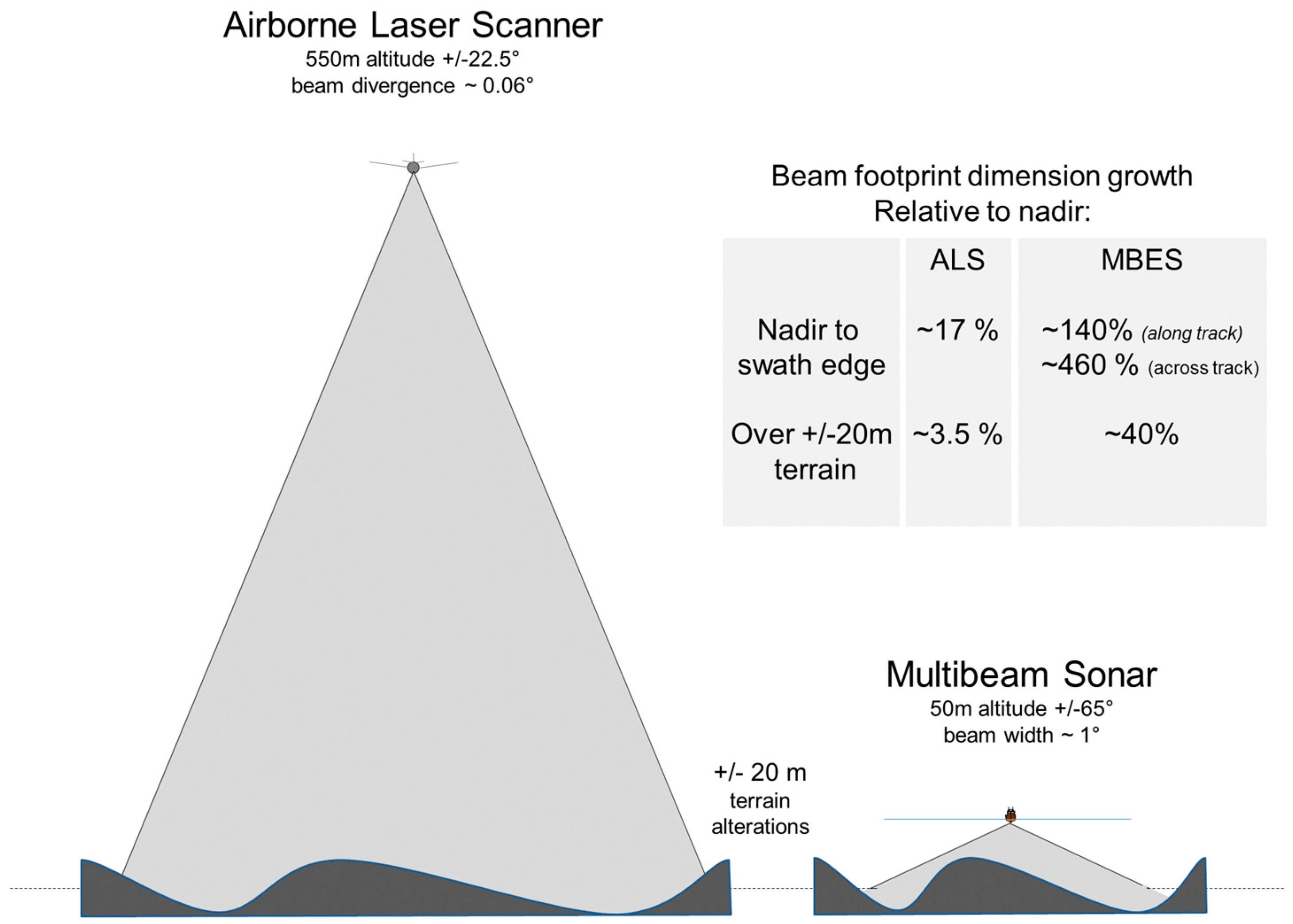
3.1. Projected Beam Width Aspects
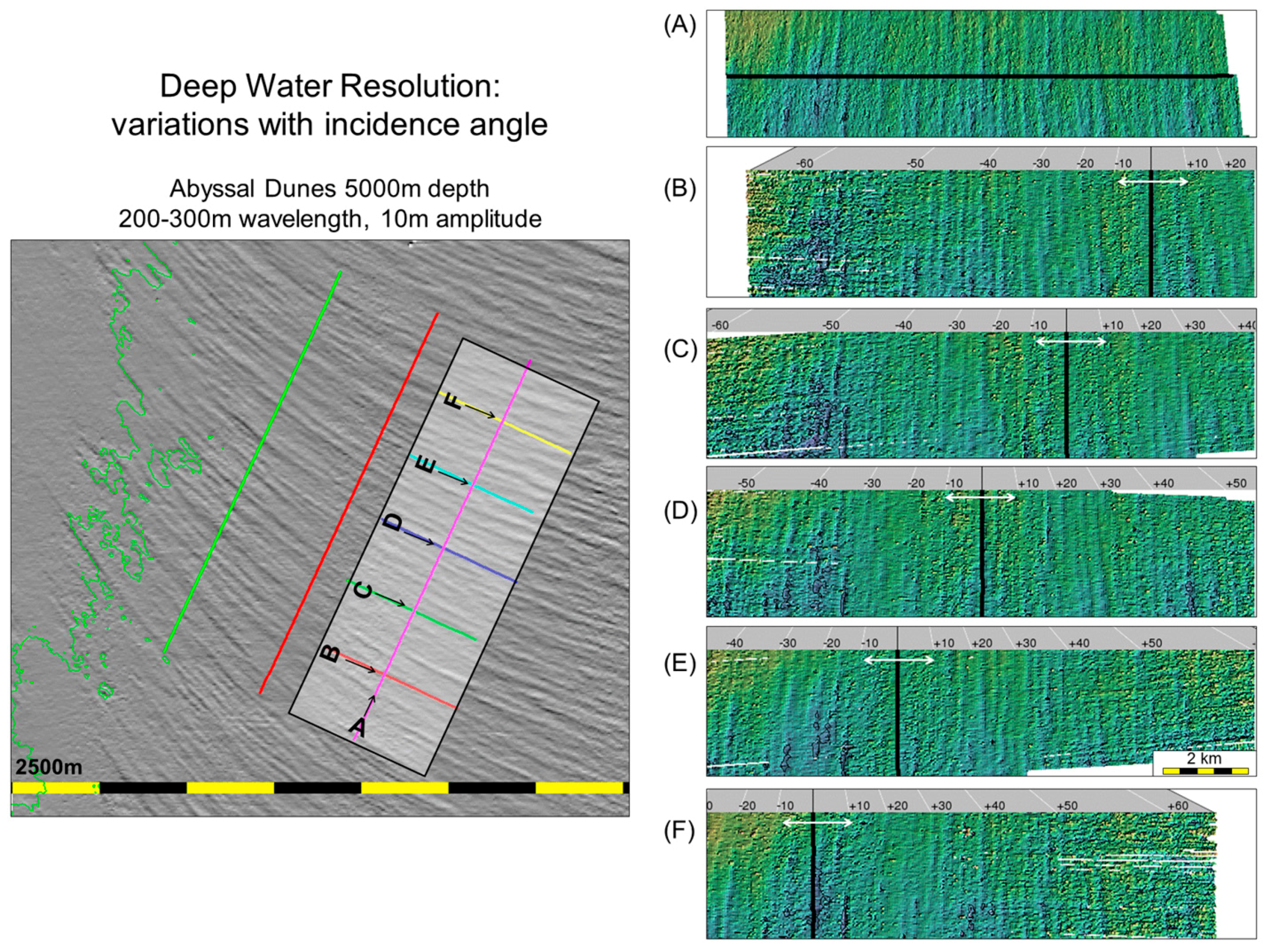
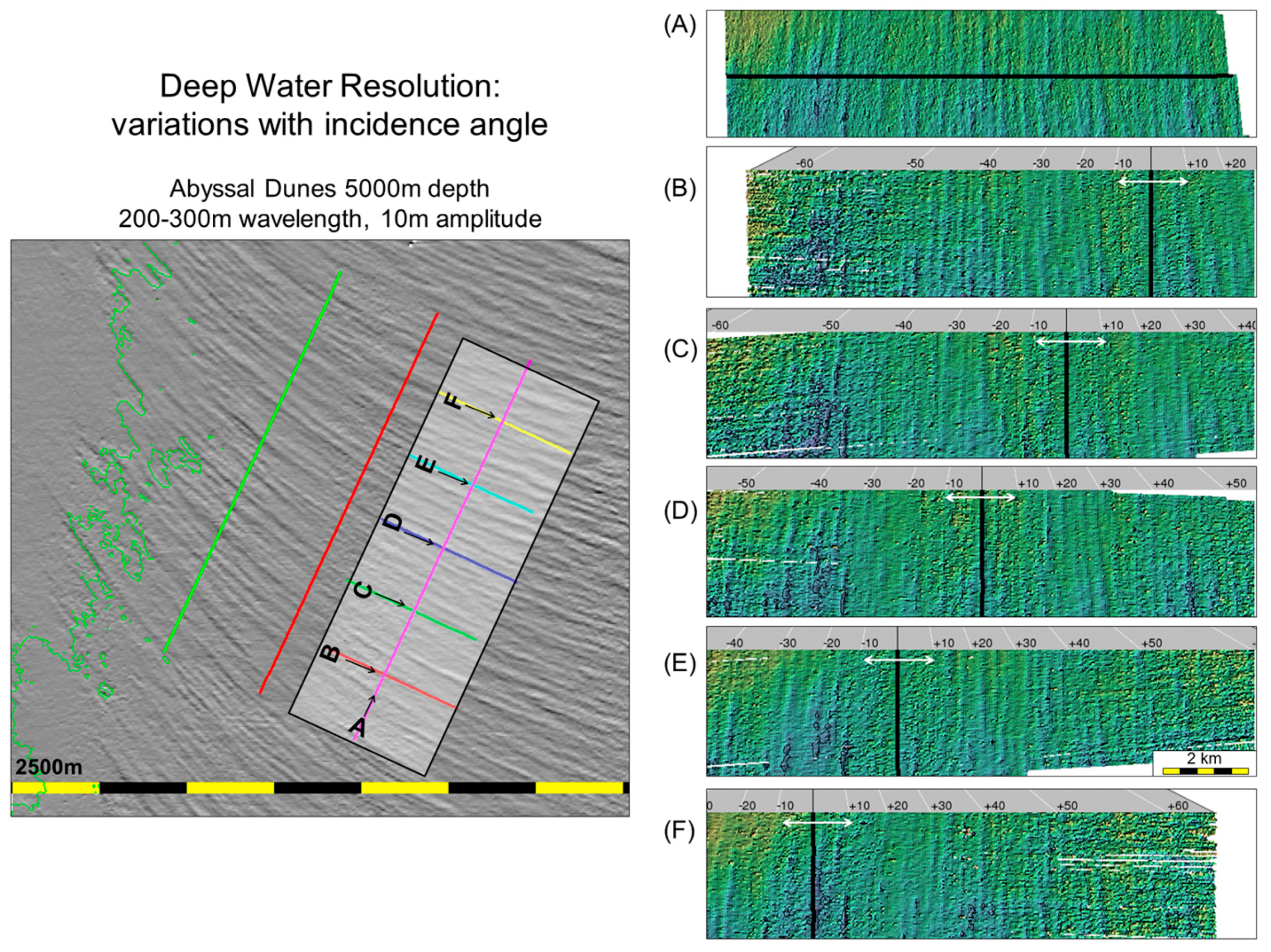
3.1.1. Steering, Range, Obliquity and Seafloor Slope
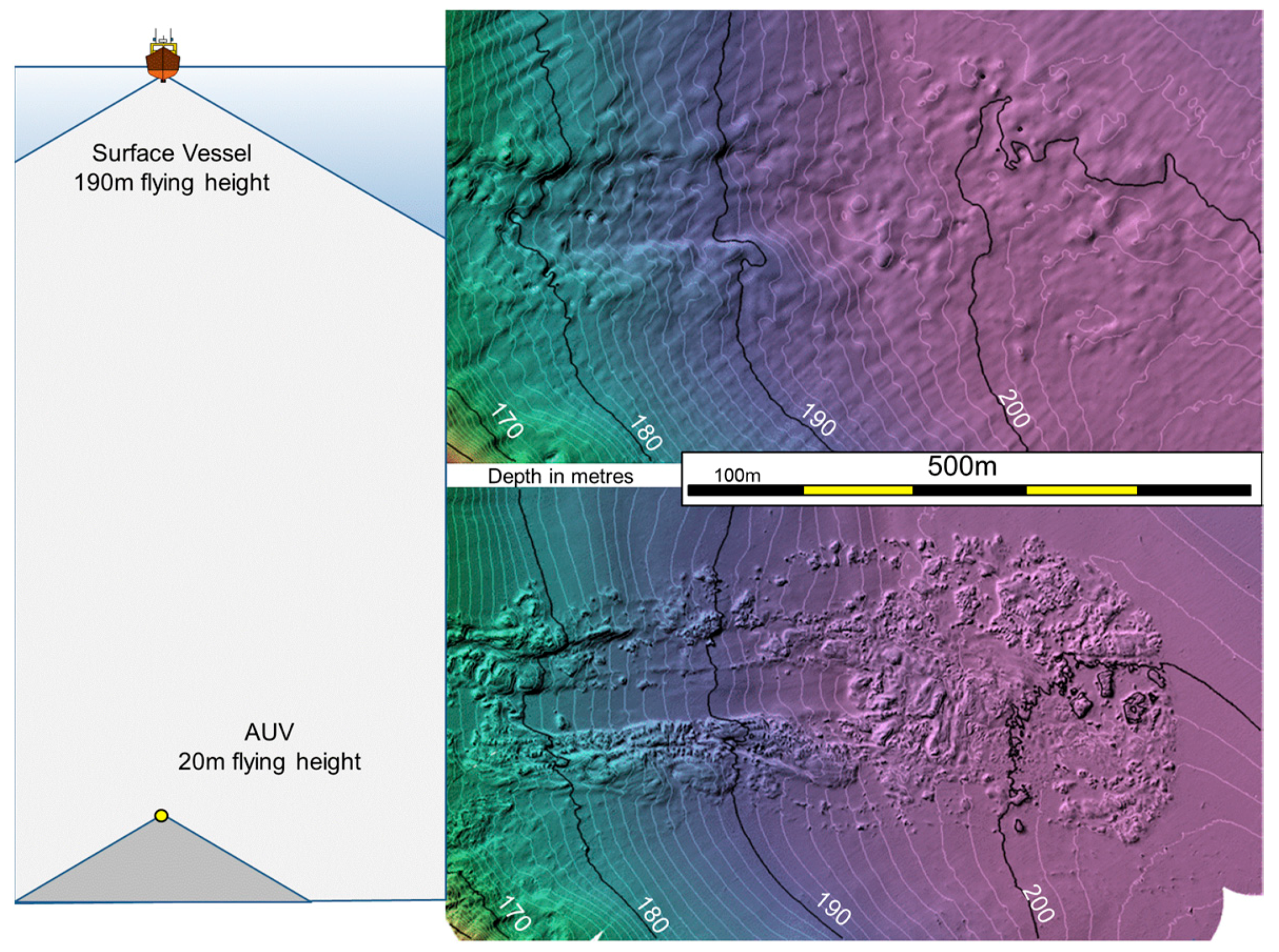
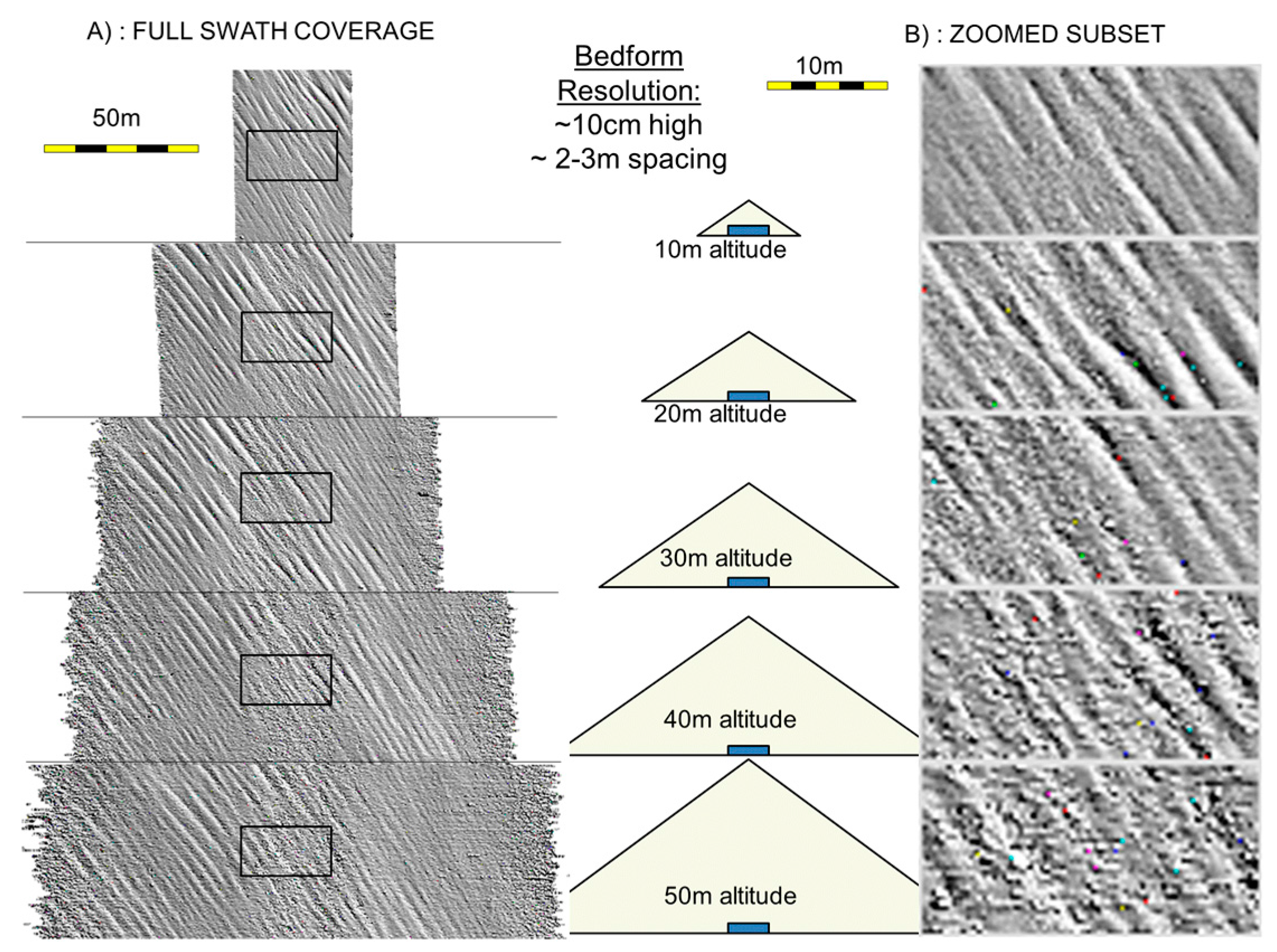
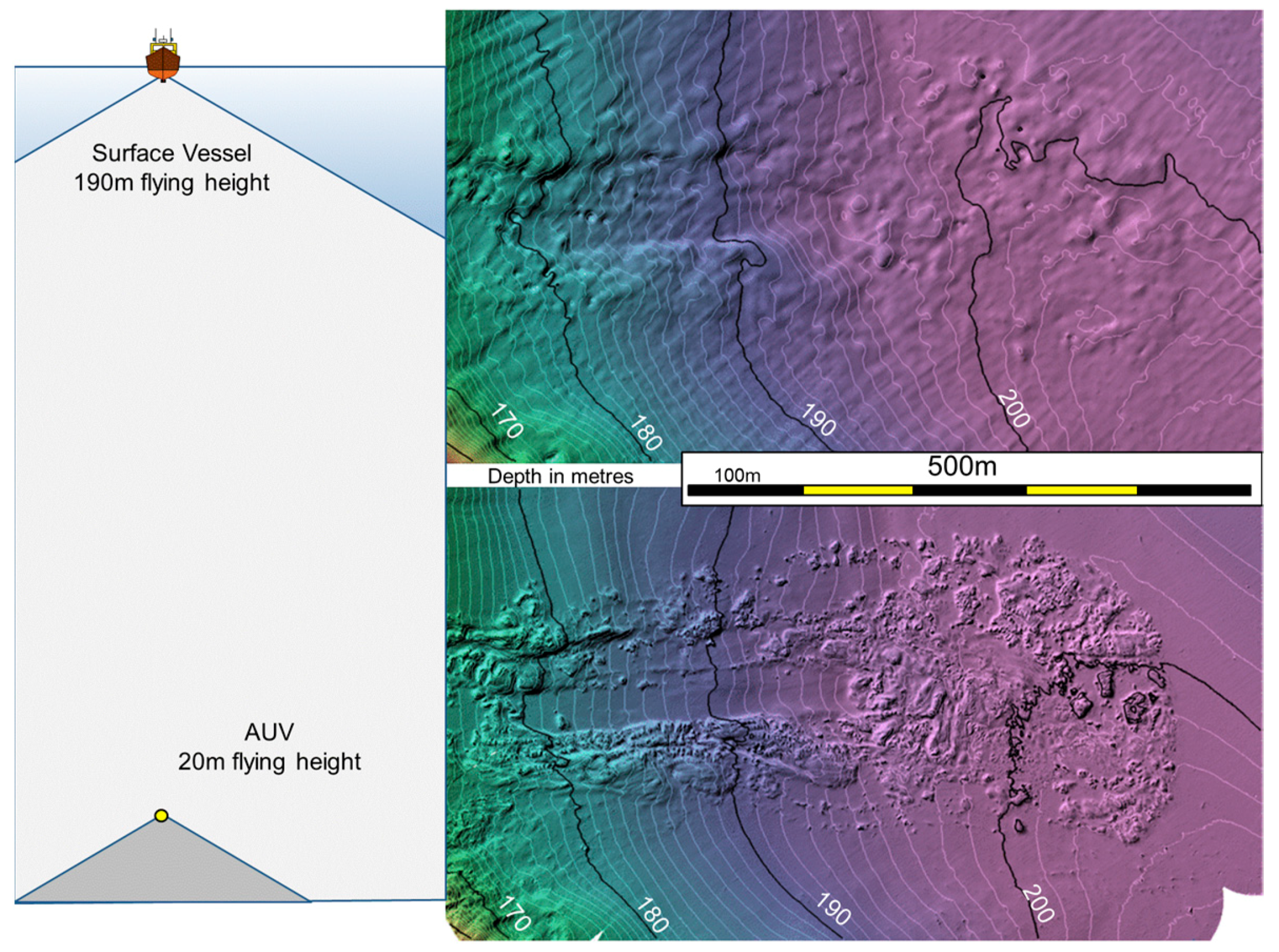
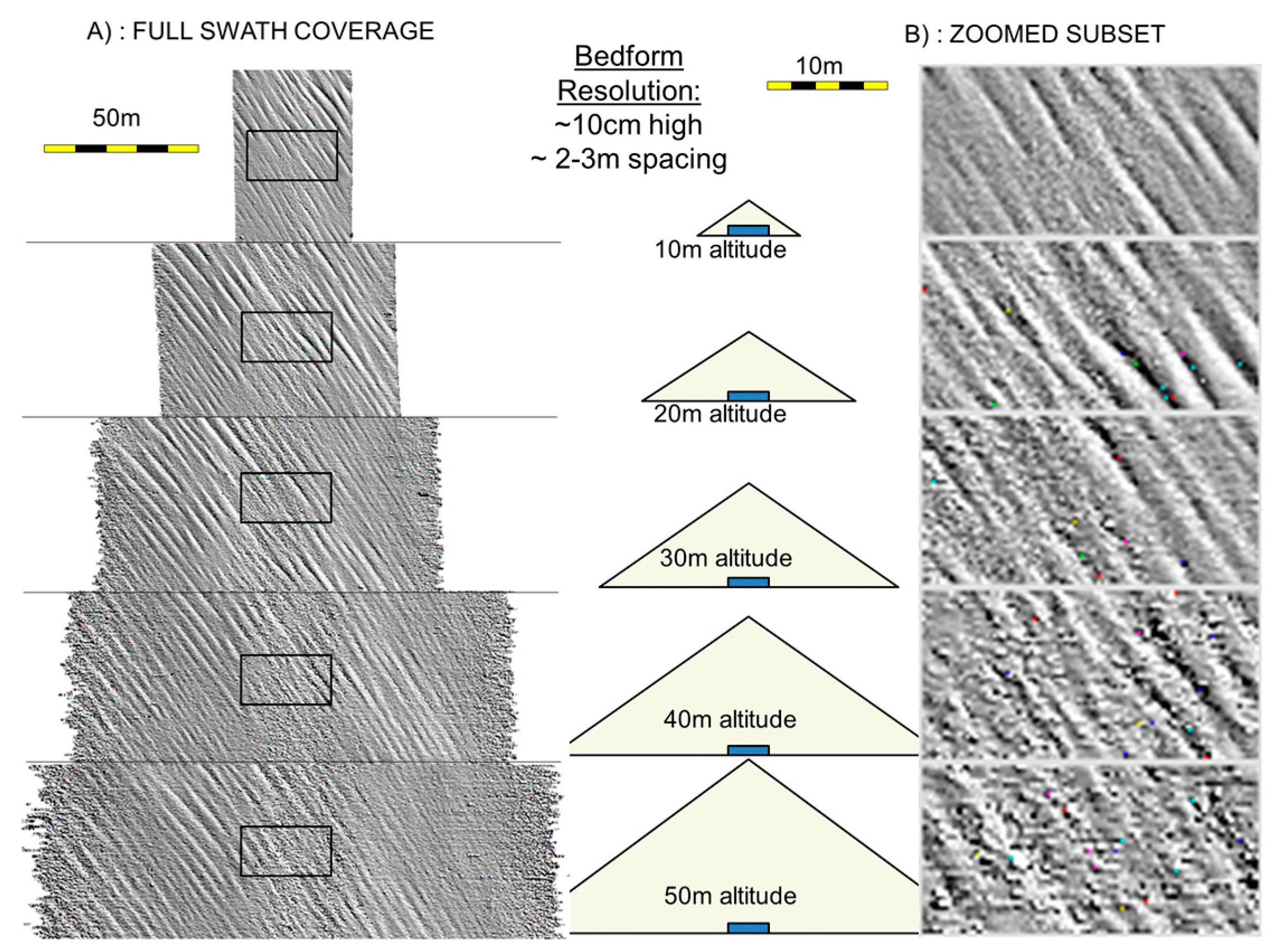
3.1.2. Elevation
3.2. Bottom Detection Effects
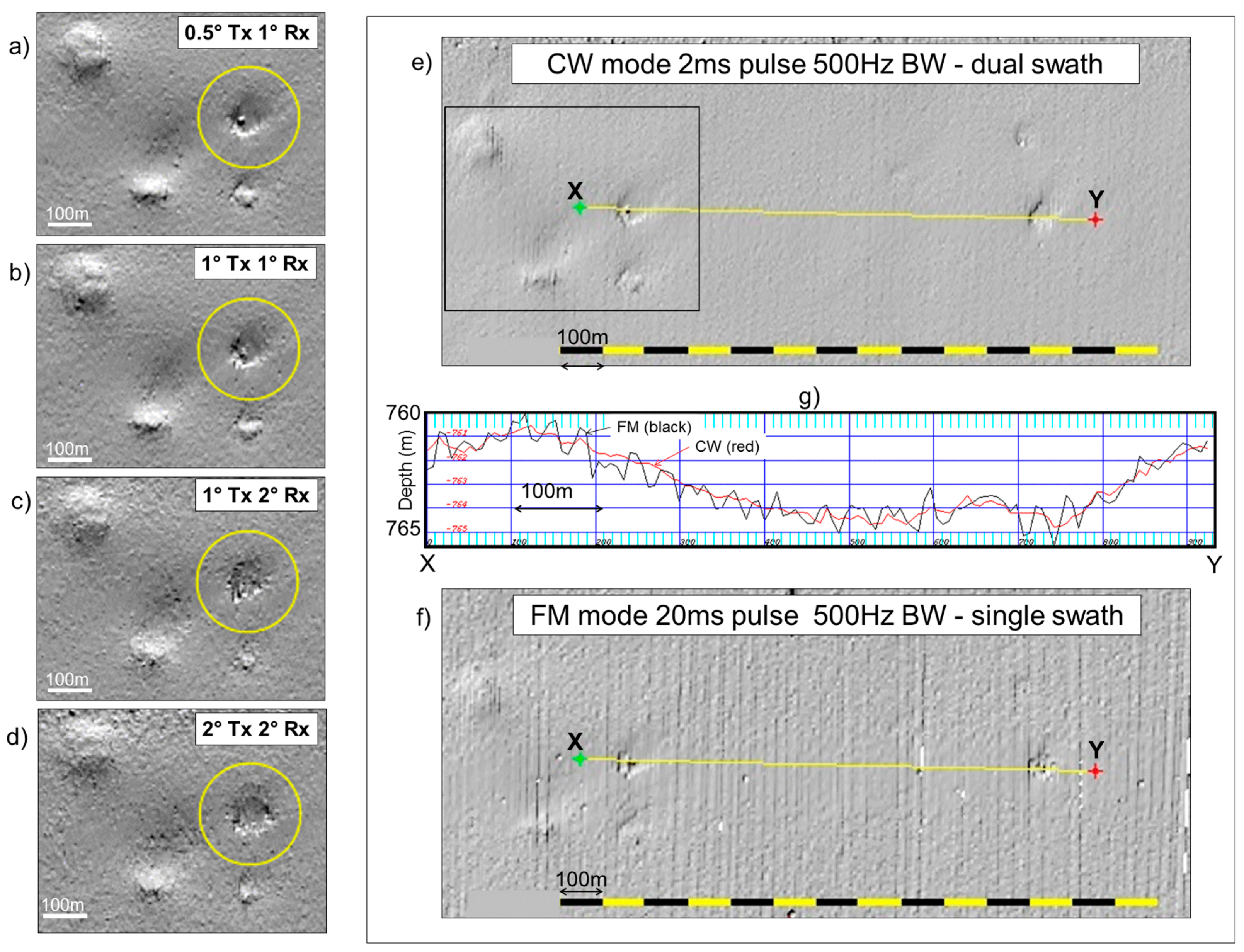
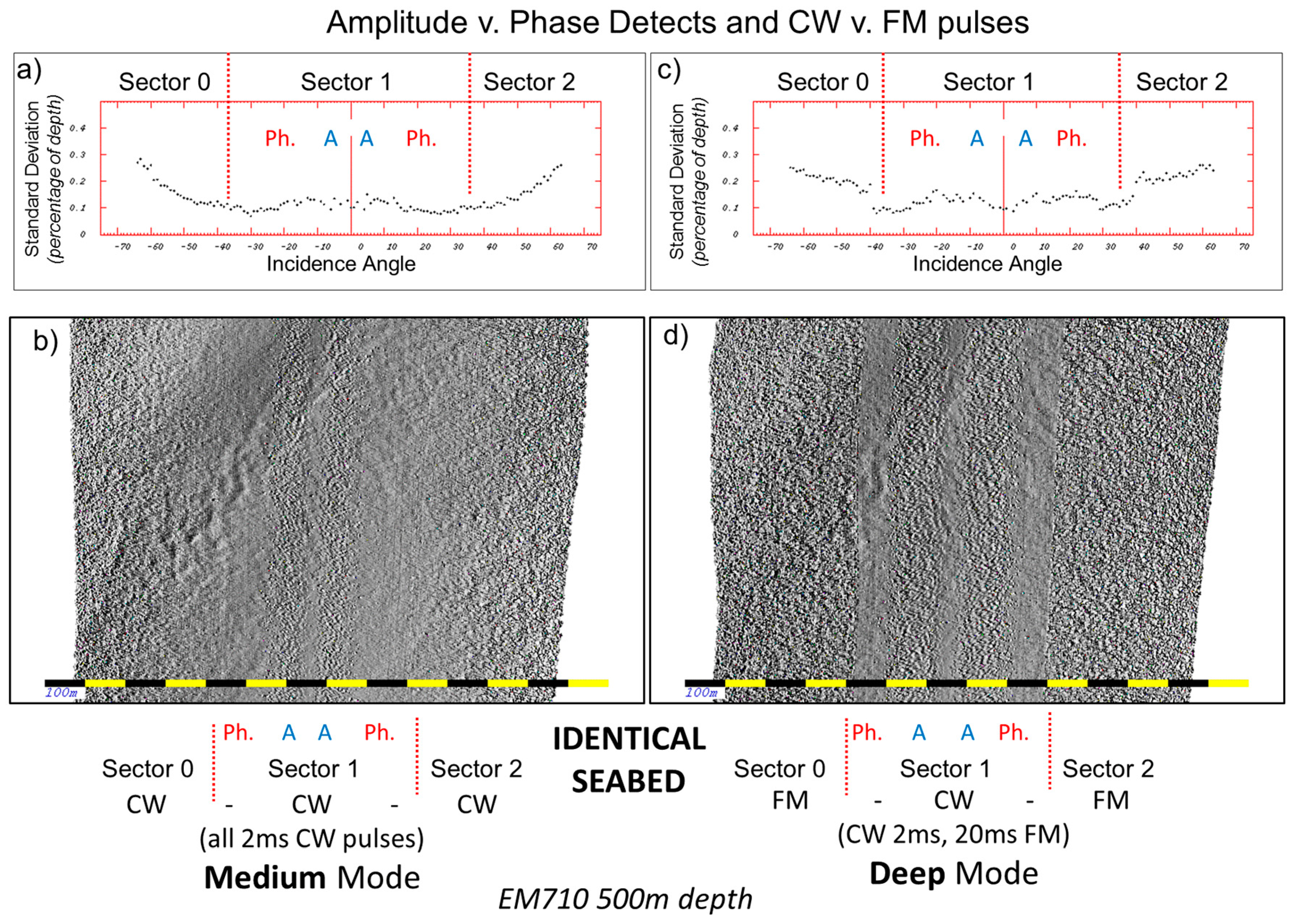
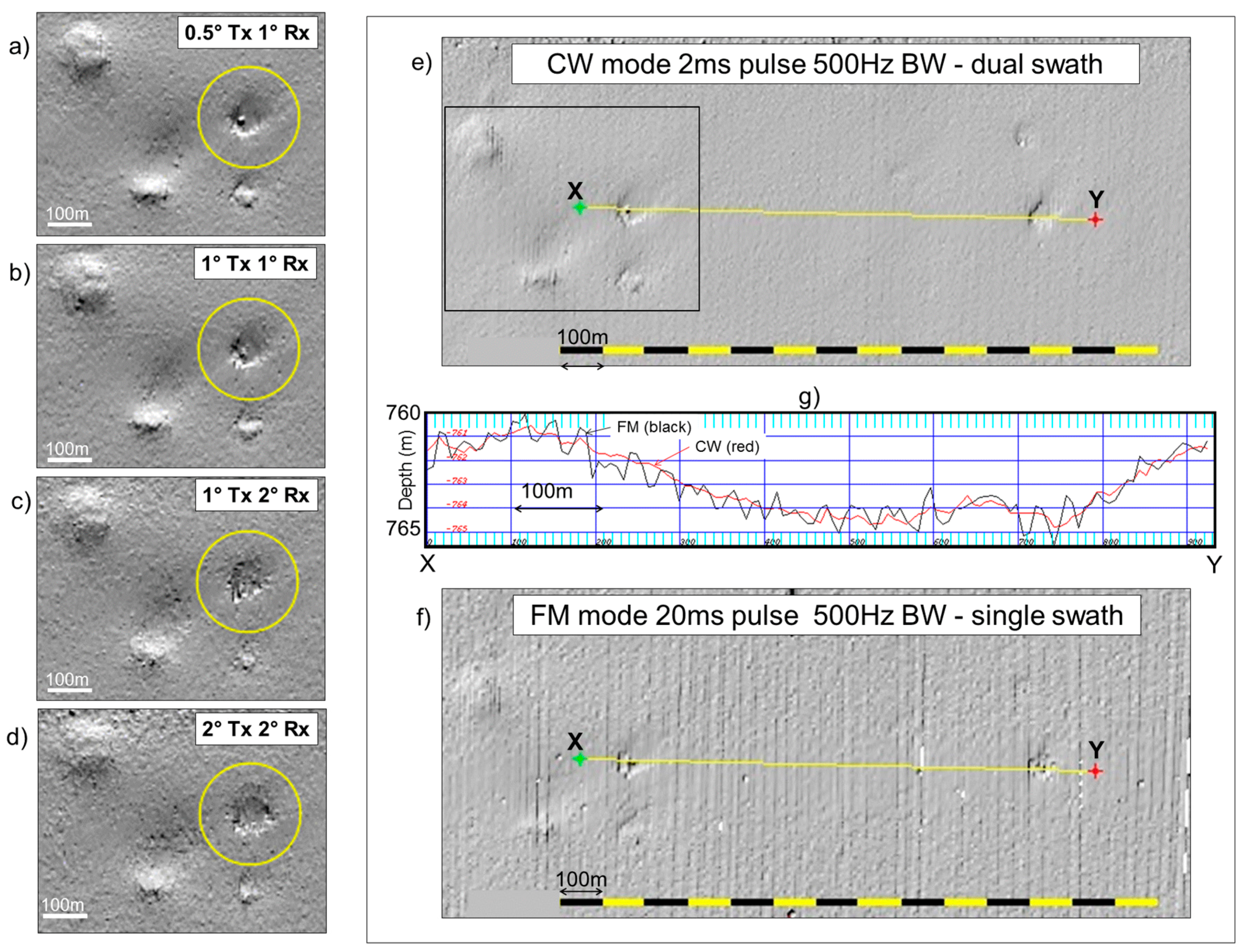
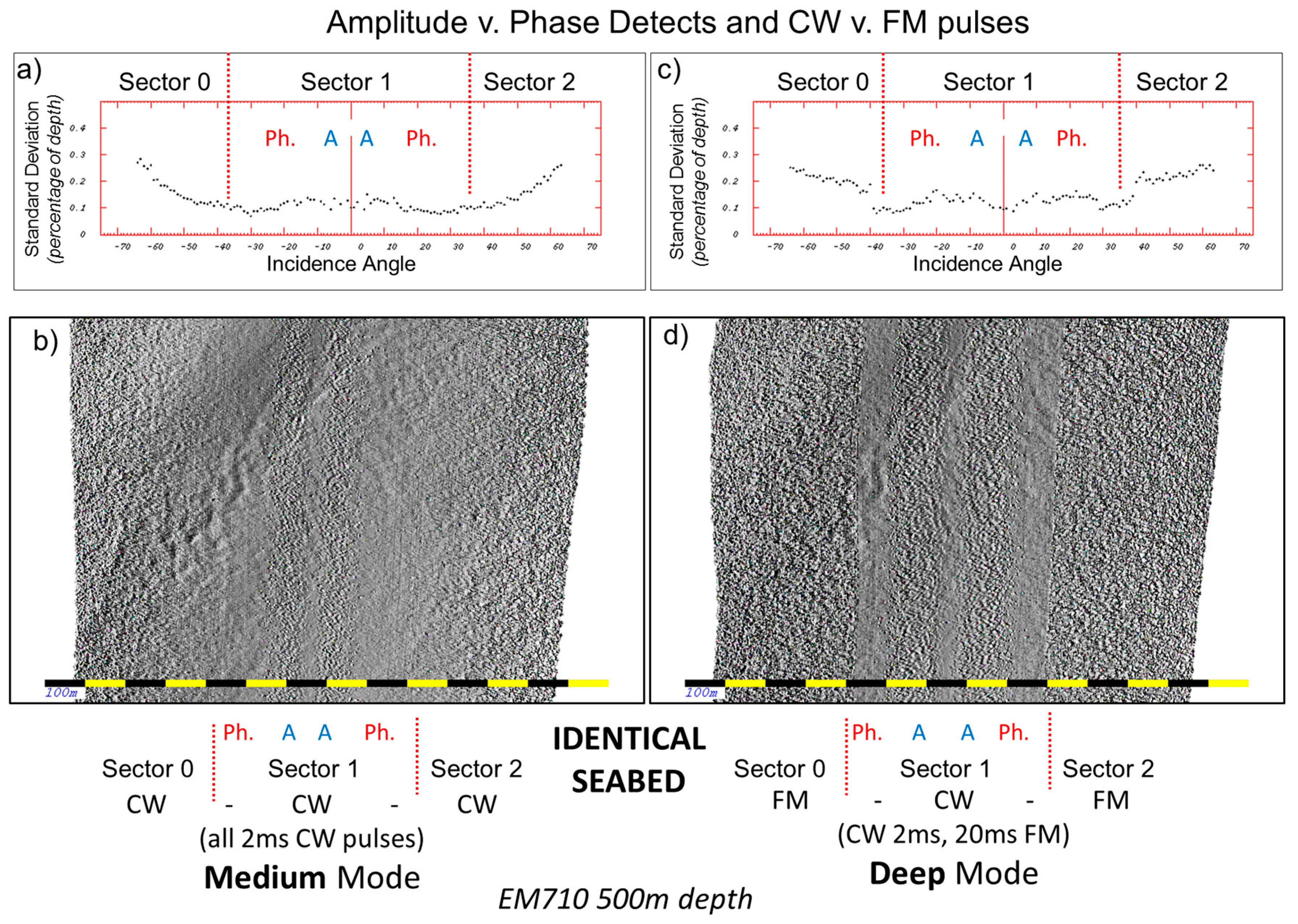
3.2.1. Amplitude vs. Phase Detection
3.2.2. FM vs. CW Pulses
- The first is a result of the Doppler heave distortion of the pulse [20].
- The second is the loss of the dual swath capability due to duty-cycle limitations.
- The third is a result of the imperfection of the matched filter process [21].
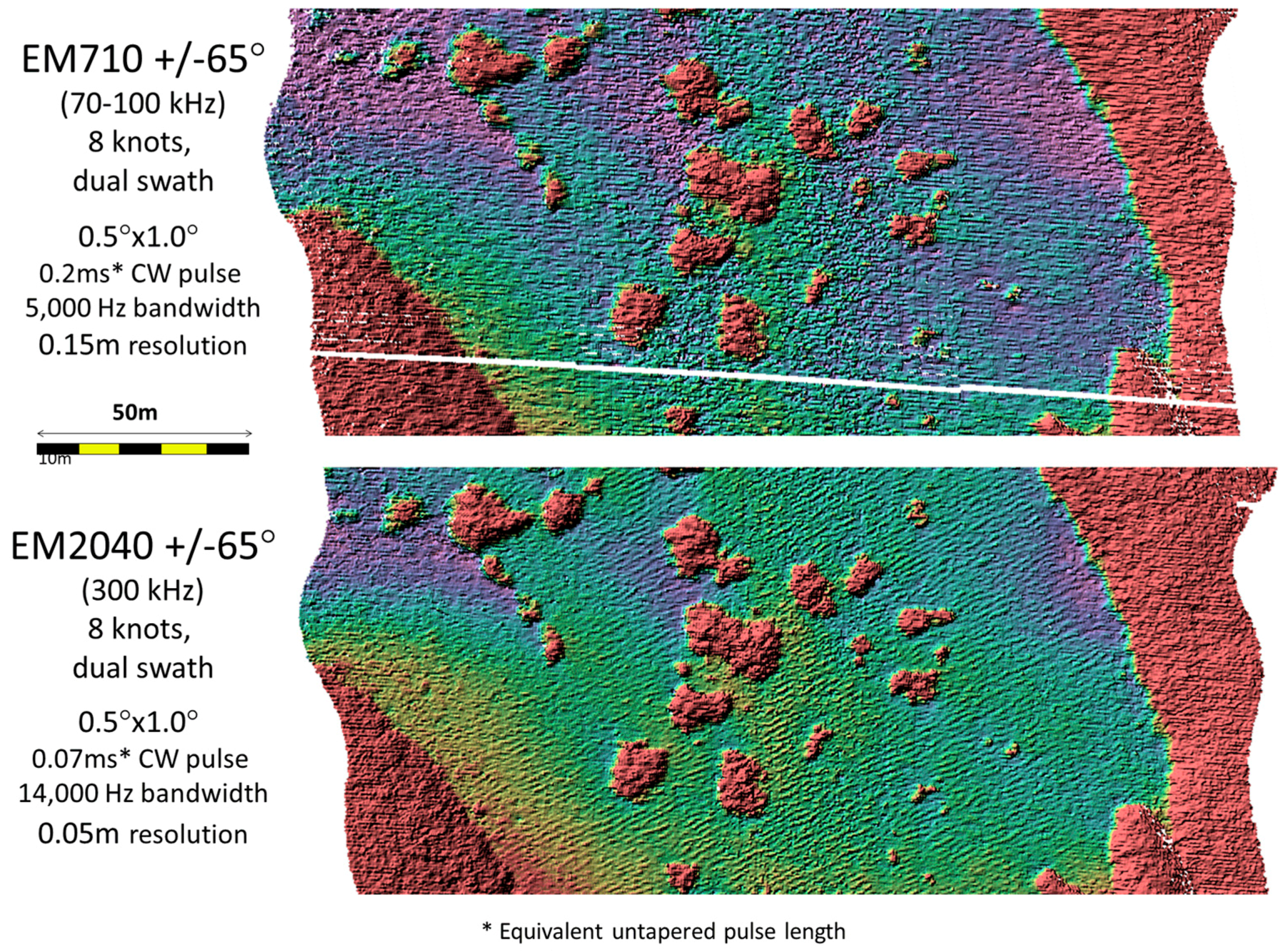
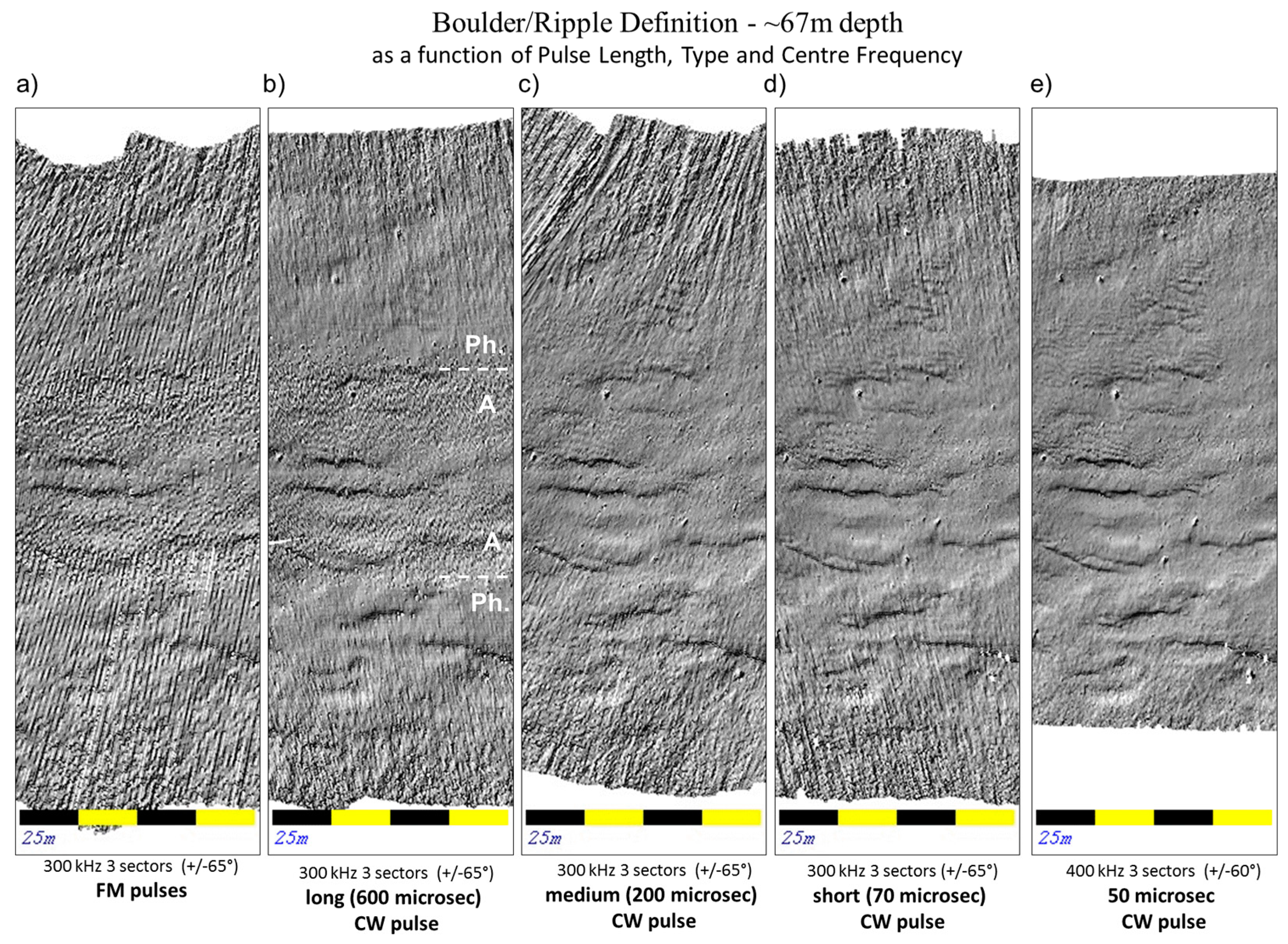
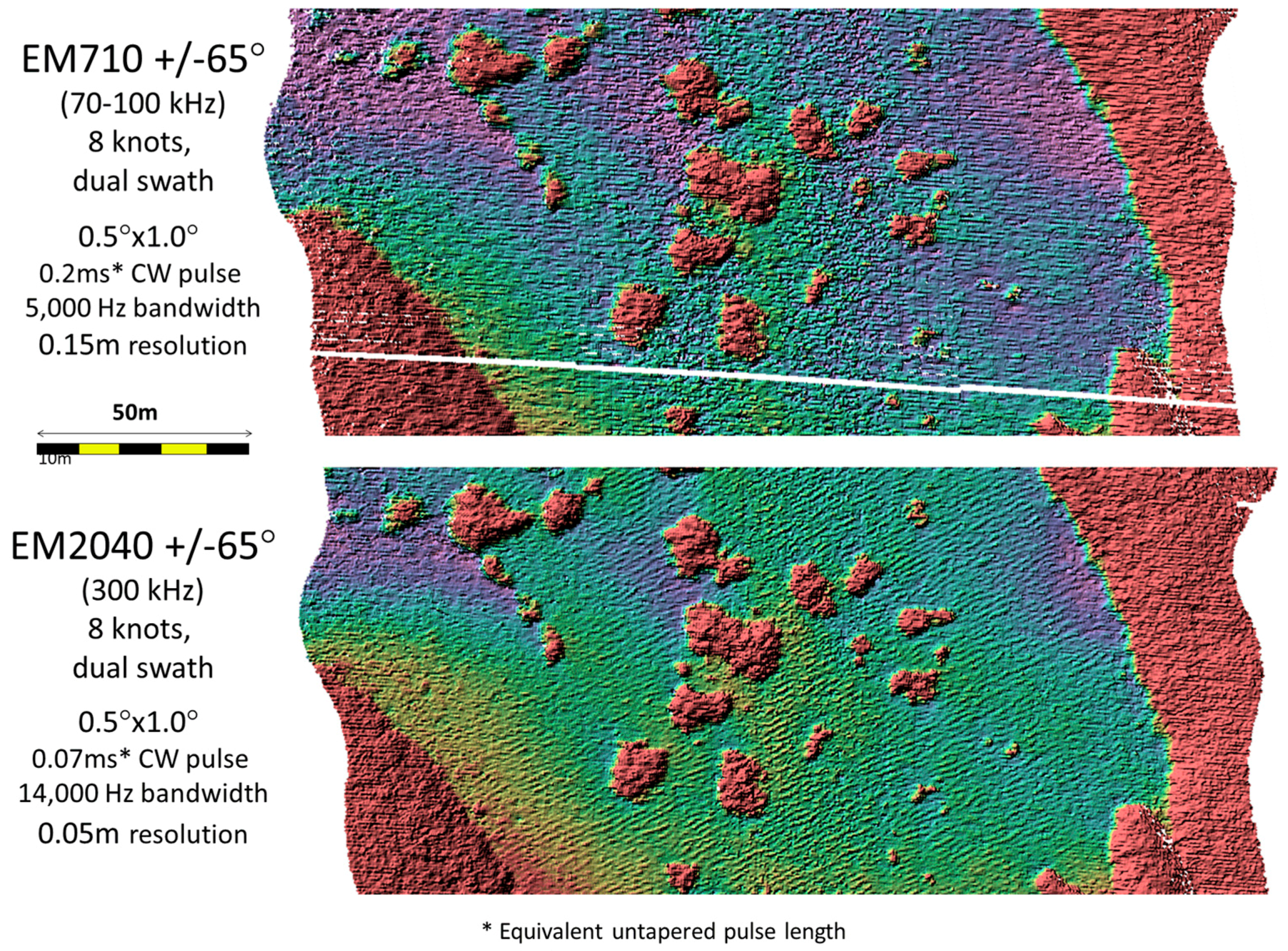
3.2.3. Pulse Length Changes
3.2.4. Impact of Operator Selection of Pulse Lengths
3.3. Beam Density Considerations
3.3.1. Beam Spacing
3.3.2. Stabilization, Pitch and Heading
3.3.3. Along-Track Density—Multi-Swath
3.3.4. Sector Width—Within Swath Beam Spacing
3.4. Corridor Overlap Considerations
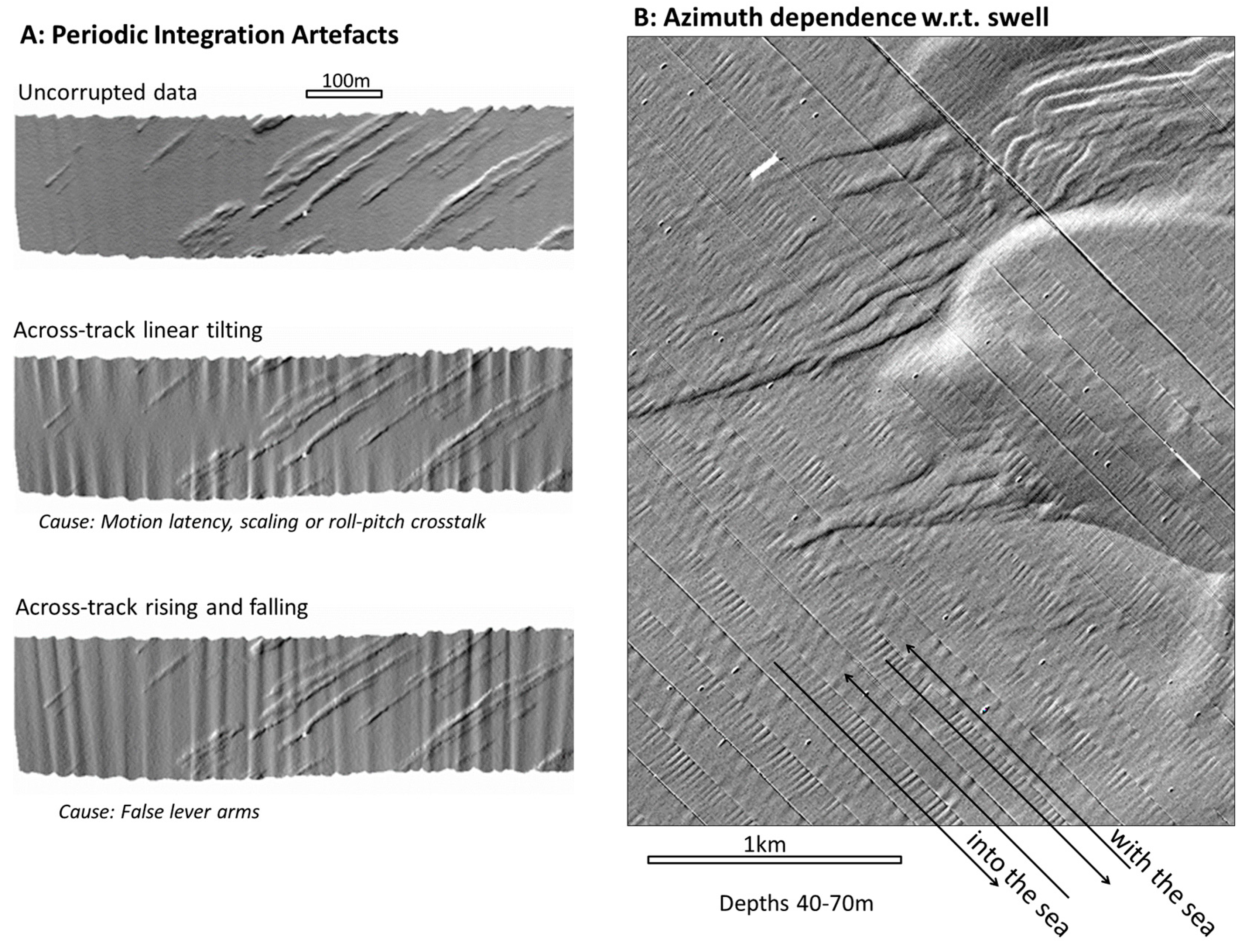
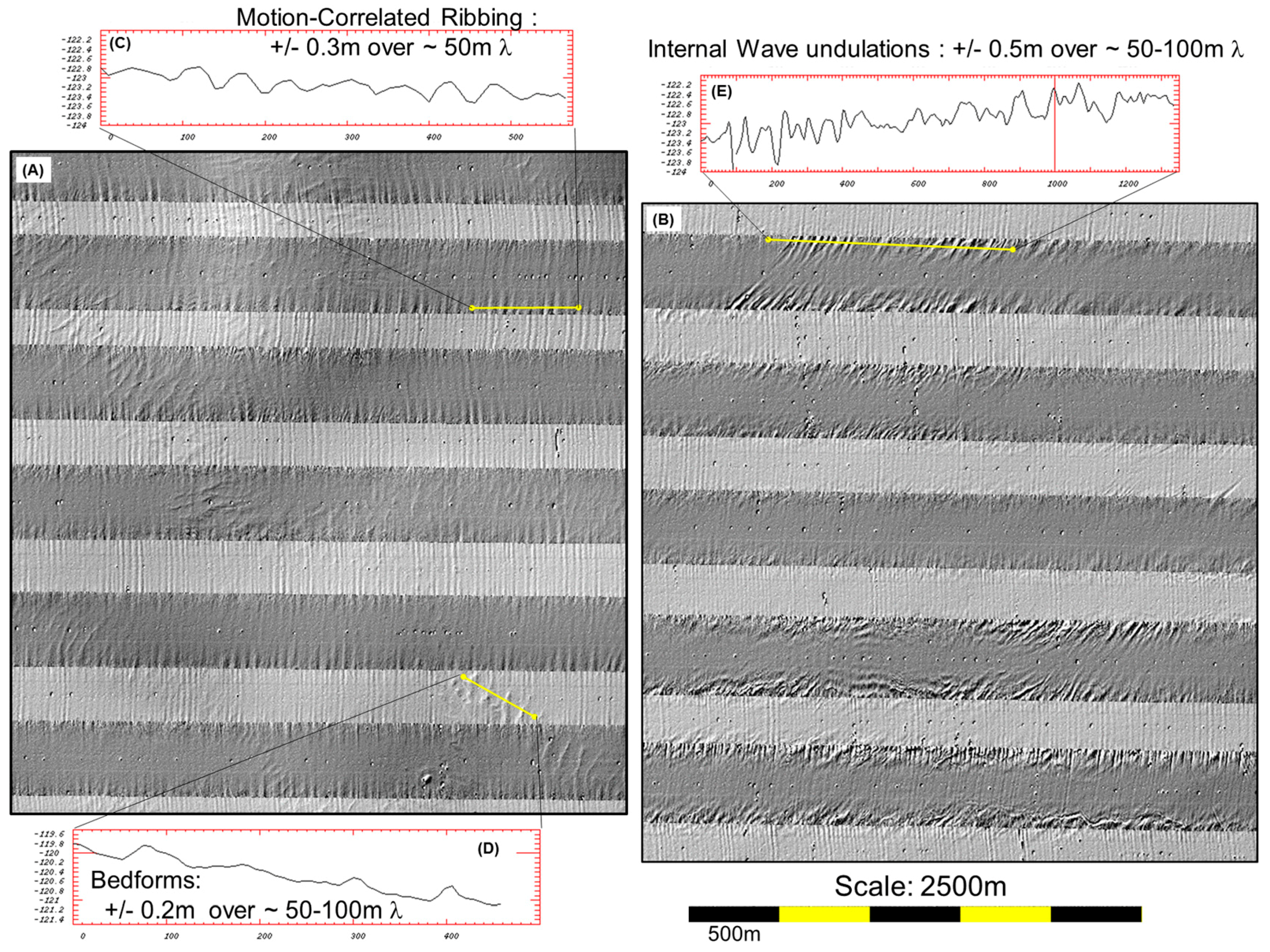
3.5. Motion Residuals
3.6. Sound Speed Residuals
- Heaving towards/away from a strong sound speed gradient.
- Rolling with an erroneous surface sound speed error.
- Internal waves or turbulence on a sound speed gradient.
4. Discussion
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Fox, C.G.; Hayes, D.E. Quantitative methods for analyzing the roughness of the seafloor. Rev. Geophys. 1985, 23, 1–48. [Google Scholar] [CrossRef]
- Shaw, P.R.; Smith, D.K. Statistical methods for describing seafloor topography. Geophys. Res. Lett. 1987, 14, 1061–1064. [Google Scholar] [CrossRef]
- Goff, J.A.; Jordan, T.H. Stochastic modeling of seafloor morphology: Inversion of Sea Beam data for second-order statistics. J. Geophys. Res. 1988, 93, 13589–13609. [Google Scholar] [CrossRef]
- Mitchell, N.C.; Hughes Clarke, J.E. Classification of seafloor geology using multibeam sonar data from the Scotian Shelf. Mar. Geol. 1994, 121, 143–160. [Google Scholar] [CrossRef]
- Lecours, V.; Dolan, M.F.J.; Micallef, A.; Lucieer, V.L. A review of marine geomorphometry, the quantitative study of the seafloor. Hydrol. Earth Syst. Sci. 2016, 20, 3207–3244. [Google Scholar] [CrossRef]
- Sánchez-Guillamón, O.; Fernández-Salas, L.M.; Vázquez, J.-T.; Palomino, D.; Medialdea, T.; López-González, N.; Somoza, L.; León, R. Shape and Size Complexity of Deep Seafloor Mounds on the Canary Basin (West to Canary Islands, Eastern Atlantic): A DEM-Based Geomorphometric Analysis of Domes and Volcanoes. Geosciences 2018, 8, 37. [Google Scholar] [CrossRef]
- Gardner, J.V. The Morphometry of the Deep-Water Sinuous Mendocino Channel and the Immediate Environs, Northeastern Pacific Ocean. Geosciences 2017, 7, 124. [Google Scholar] [CrossRef]
- Diesing, M.; Thorsnes, T. Mapping of Cold-Water Coral Carbonate Mounds Based on Geomorphometric Features: An Object-Based Approach. Geosciences 2018, 8, 34. [Google Scholar] [CrossRef]
- Di Stefano, M.; Mayer, L.A. An Automatic Procedure for the Quantitative Characterization of Submarine Bedforms. Geosciences 2018, 8, 28. [Google Scholar] [CrossRef]
- Masetti, G.; Mayer, L.A.; Ward, L.G. A Bathymetry- and Reflectivity-Based Approach for Seafloor Segmentation. Geosciences 2018, 8, 14. [Google Scholar] [CrossRef]
- Greene, H.G.; Cacchione, D.A.; Hampton, M.A. Characteristics and Dynamics of a Large Sub-Tidal Sand Wave Field—Habitat for Pacific Sand Lance (Ammodytes personatus), Salish Sea, Washington, USA. Geosciences 2017, 7, 107. [Google Scholar] [CrossRef]
- Wilson, M.F.J.; O’Connell, B.; Brown, C.; Guinan, J.C.; Grehan, A.J. Multiscale Terrain Analysis of Multibeam Bathymetry Data for Habitat Mapping on the Continental Slope. Mar. Geod. 2007, 30, 3–35. [Google Scholar] [CrossRef]
- De Moustier, C. State of the art in swath bathymetry survey systems. Int. Hydrogr. Rev. 1988, 65, 25–54. [Google Scholar]
- Lurton, X. An introduction to Underwater Acoustics: Principles and Applications, 2nd ed.; Springer: Berlin, Germany, 2010; Chapter 8. [Google Scholar]
- Baltsavias, E.P. Airborne laser scanning: Basic relations and formulas. ISPRS J. Photogramm. Remote Sens. 1999, 54, 199–214. [Google Scholar] [CrossRef]
- Ussyshkin, R.V.; Ravi, R. Mitigating the impact of the laser footprint size on airborne lidar data accuracy. In Proceedings of the ASPRS 2009 Annual Conference, Baltimore, MD, USA, 9–13 March 2009. [Google Scholar]
- De Moustier, C. Signal processing for swath bathymetry and concurrent seafloor acoustic imaging. In Acoustic Signal Processing for Ocean Exploration; Moura, J.M.F., Louttie, I.M.G., Eds.; Springer: Dordrecht, The Netherlands, 1993; pp. 329–354. [Google Scholar]
- Hughes Clarke, J.E.; Gardner, J.V.; Torresan, M.; Mayer, L.A. The limits of spatial resolution achievable using a 30 kHz multibeam sonar: Model predictions and field results. In Proceedings of the OCEANS 98 Conference Proceedings, Nice, France, 28 September–1 October 1998; Volume 3, pp. 1823–1827. [Google Scholar] [CrossRef]
- Lurton, X.; Augustin, J.-M. A measurement quality factor for swath bathymetry. IEEE J. Ocean. Eng. 2010, 35, 852–862. [Google Scholar] [CrossRef]
- Vincent, P.; Sintes, C.; Maussang, F.; Lurton, X.; Garello, R. Doppler effect on bathymetry using frequency modulated multibeam echo sounders. In Proceedings of the 2011 Oceans, Santander, Spain, 6–9 June 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Vincent, P.; Maussang, F.; Lurton, X.; Sintes, C.; Garello, R. Bathymetry degradation causes for frequency modulated multibeam echo sounders. In Proceedings of the 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Hughes Clarke, J.E. Optimal use of multibeam technology in the study of shelf morphodynamics. In Sediments, Morphology and Sedimentary Processes on Continental Shelves: Advances in Technologies, Research, and Applications; Wiley Online Library: Hoboken, NJ, USA, 2012; pp. 1–28. [Google Scholar] [CrossRef]
- Contract Specifications for Hydrographic Surveys, Version 1.2, New Zealand Hydrographic Authority. Available online: https://www.linz.govt.nz/docs/hydro/stds-and-specs/hyspec-v1-2-aug2010.pdf (accessed on 10 February 2018).
- Hughes Clarke, J.E.; Mayer, L.A.; Wells, D.E. Shallow-water imaging multibeam sonars: A new tool for investigating seafloor processes in the coastal zone and on the continental shelf. Mar. Geophys. Res. 1996, 18, 607–629. [Google Scholar] [CrossRef]
- Hughes Clarke, J.E. Dynamic motion residuals in swath sonar data: Ironing out the creases. Int. Hydrogr. Rev. 2003, 4, 6–23. [Google Scholar]
- Hughes Clarke, J.E. Coherent refraction “noise” in multibeam data due to oceanographic turbulence. In Proceedings of the US Hydrographic Conference 2017, Galveston, TX, USA, 20–23 March 2017. [Google Scholar]




© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hughes Clarke, J.E. The Impact of Acoustic Imaging Geometry on the Fidelity of Seabed Bathymetric Models. Geosciences 2018, 8, 109. https://doi.org/10.3390/geosciences8040109
Hughes Clarke JE. The Impact of Acoustic Imaging Geometry on the Fidelity of Seabed Bathymetric Models. Geosciences. 2018; 8(4):109. https://doi.org/10.3390/geosciences8040109
Chicago/Turabian StyleHughes Clarke, John E. 2018. "The Impact of Acoustic Imaging Geometry on the Fidelity of Seabed Bathymetric Models" Geosciences 8, no. 4: 109. https://doi.org/10.3390/geosciences8040109
APA StyleHughes Clarke, J. E. (2018). The Impact of Acoustic Imaging Geometry on the Fidelity of Seabed Bathymetric Models. Geosciences, 8(4), 109. https://doi.org/10.3390/geosciences8040109