
Sequential Ensembles Tolerant to Synthetic Aperture Radar (SAR) Soil Moisture Retrieval Errors

Abstract
:1. Introduction
2. Methods
2.1. Forecasts: Soil-Vegetation-Atmosphere Transfer (SVAT) Model
2.2. Observations: SAR Retrievals
2.2.1. Inversion
2.2.2. Roughness Experimental Set-up
2.3. Ensemble Data Assimilation
2.3.1. DEnKF (Sequential Ensemble)
2.3.2. EnOI (Stationary Ensemble)
2.3.3. Experimental Set-up
3. Results and Discussions
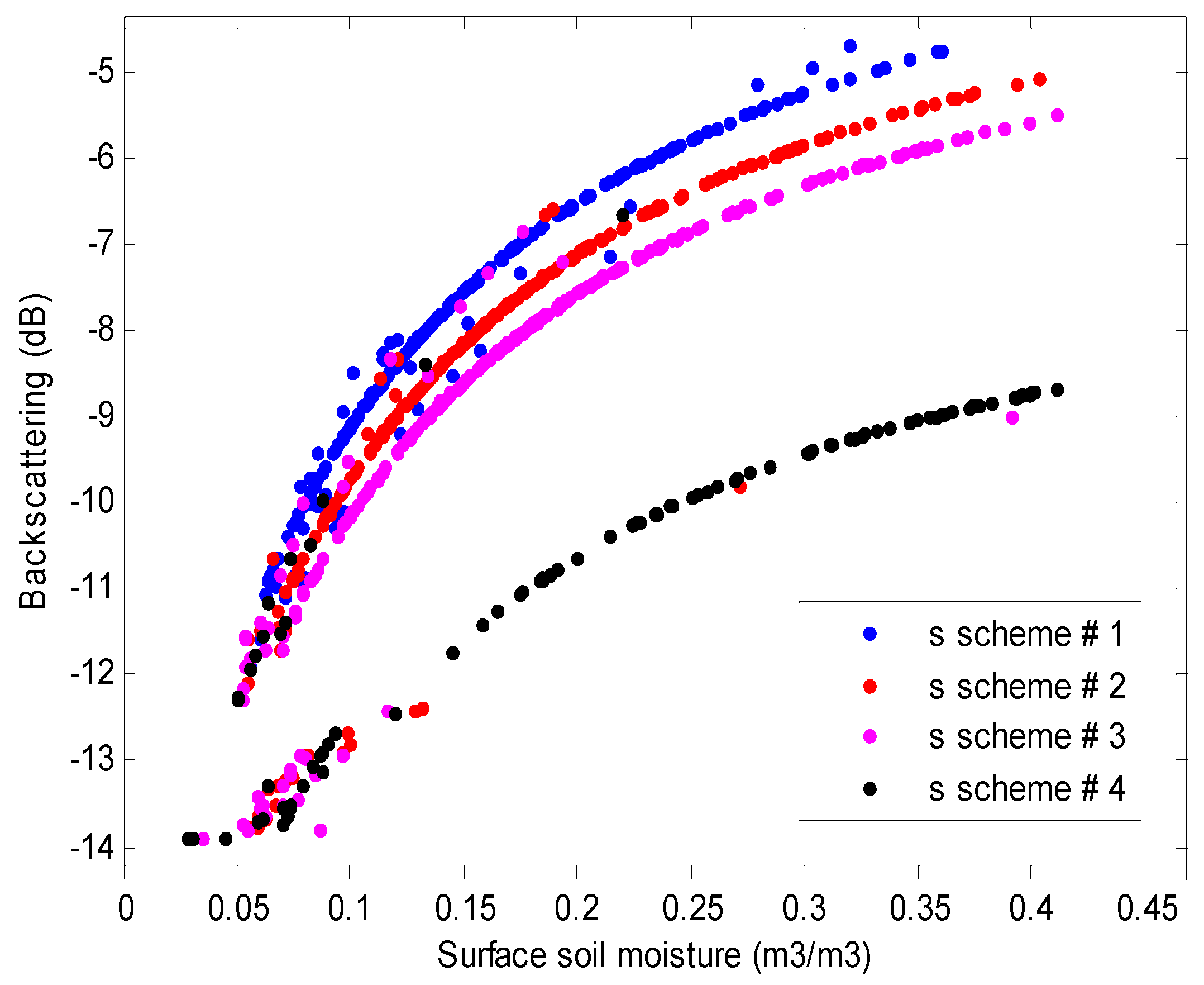
3.1. Propagation of Roughness to SAR Retrievals
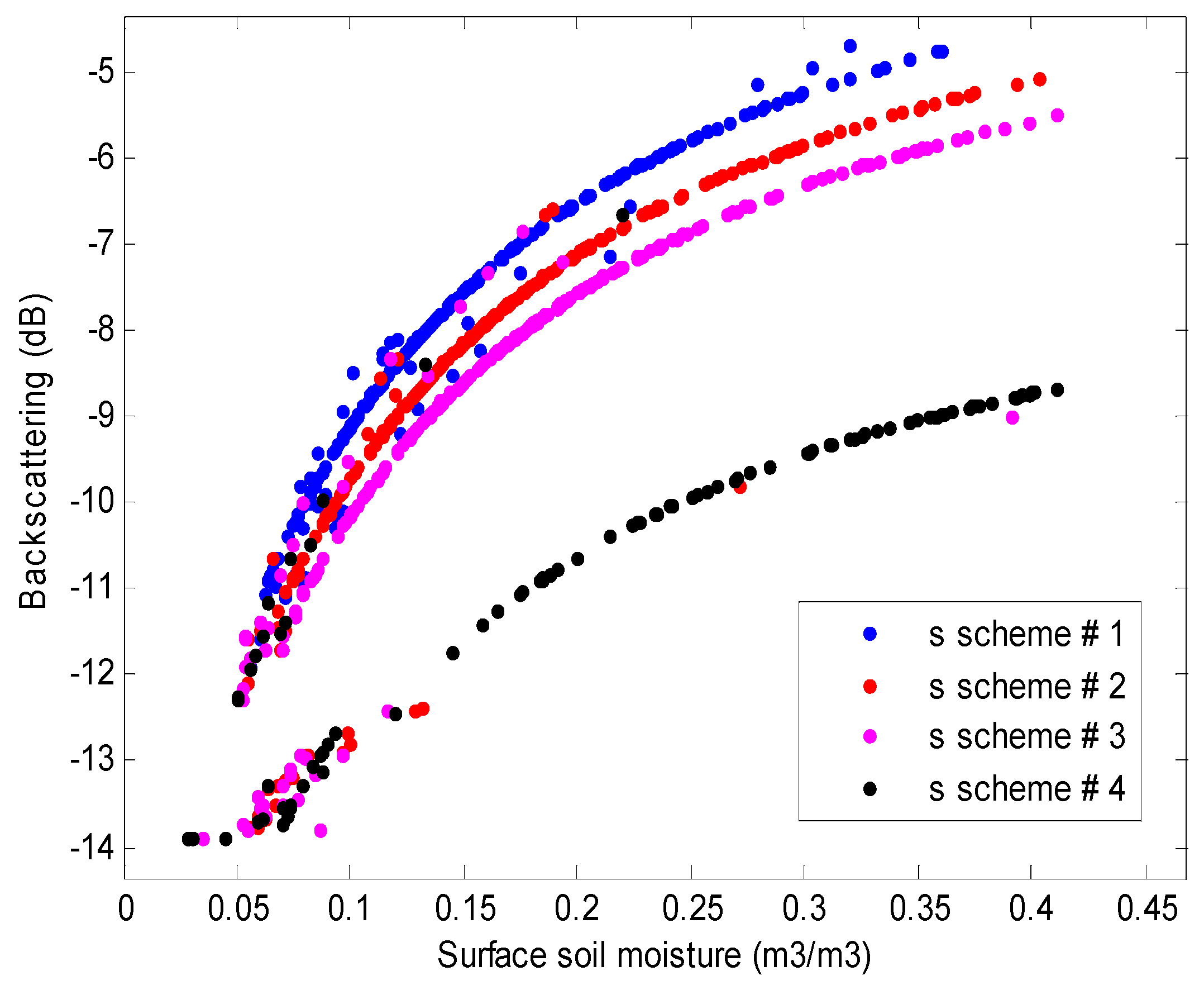
3.1.1. Impact of Roughness on the Relationship between Backscattering and Soil Moisture Retrievals: Pixel to Pixel Correspondence
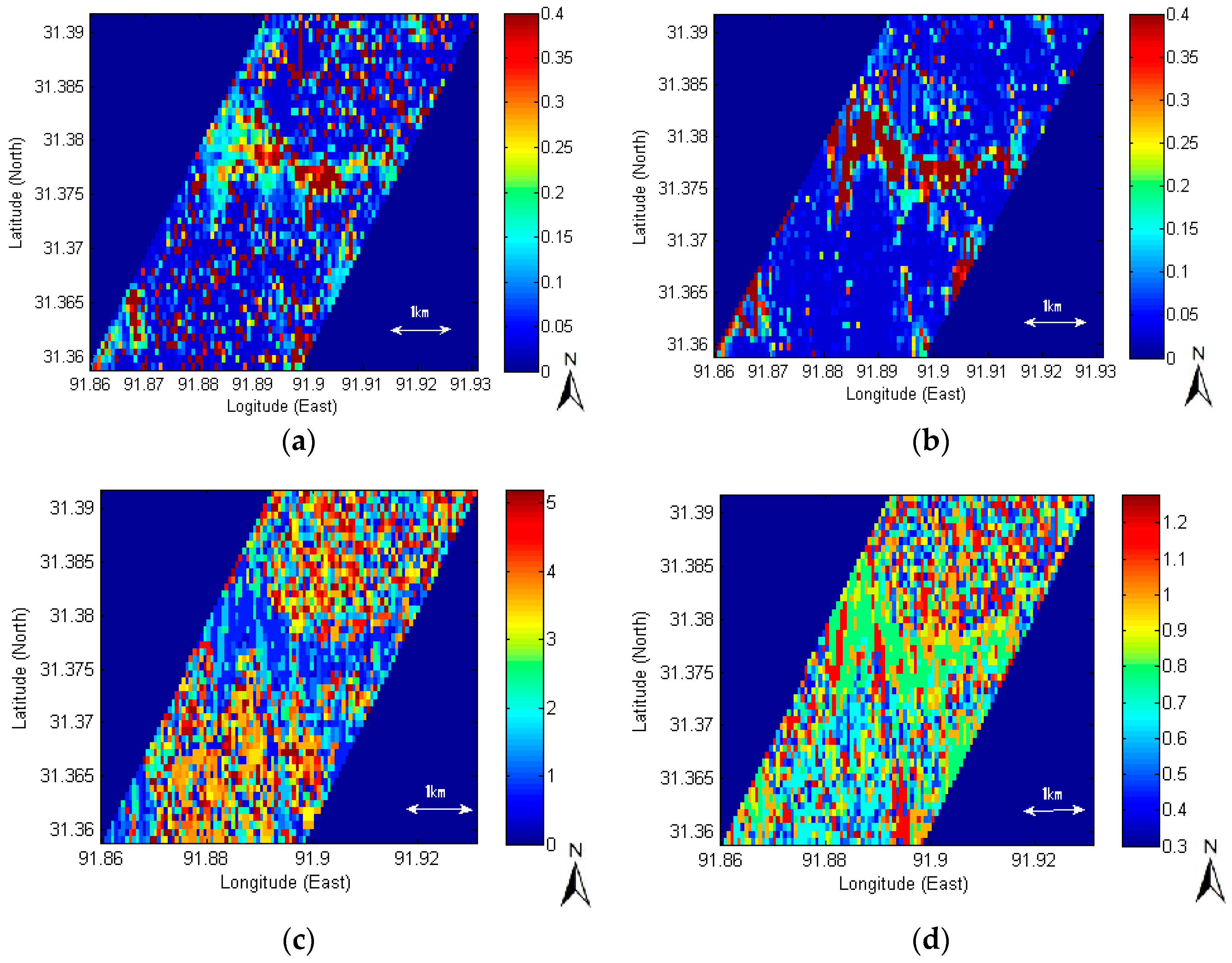
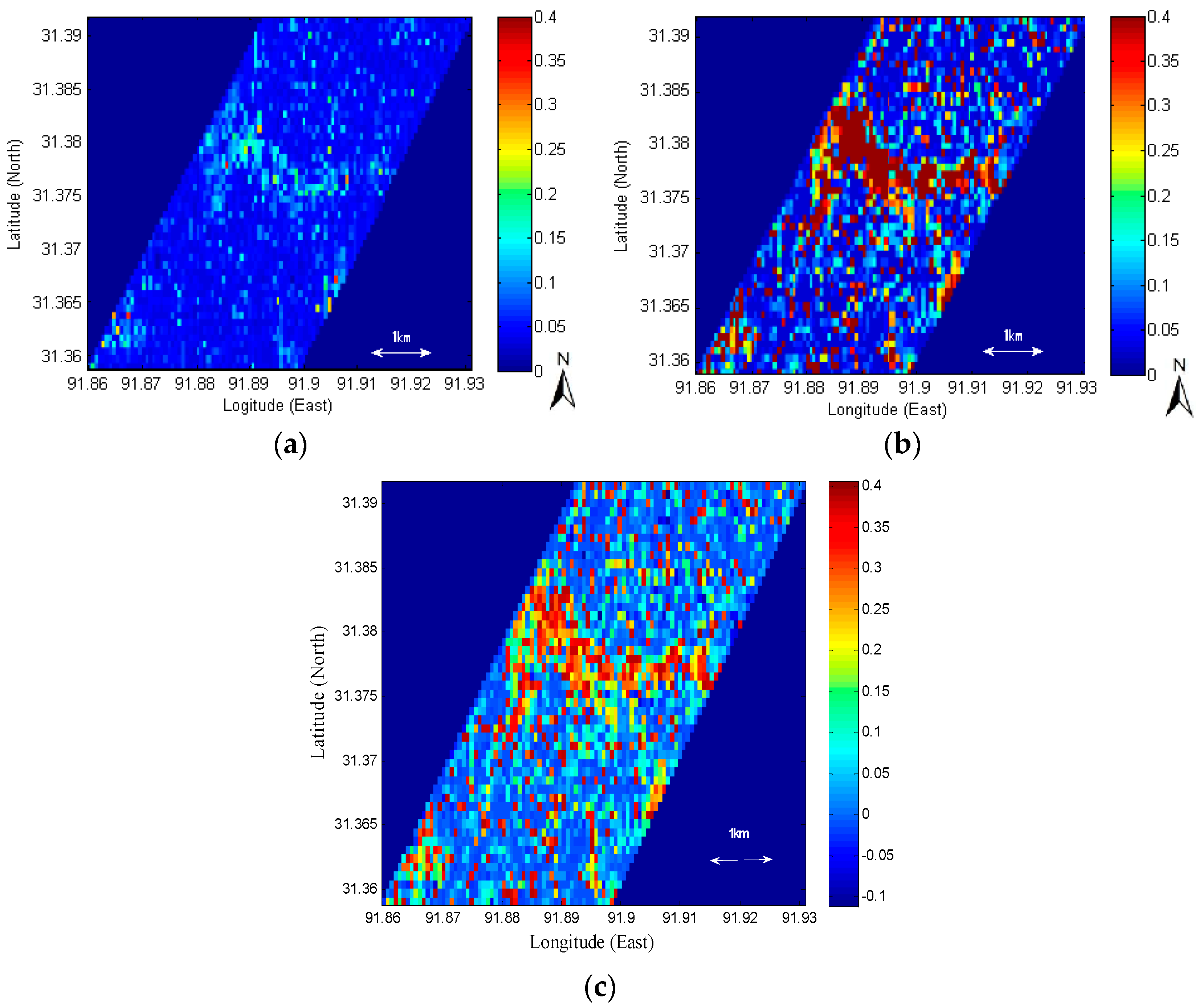
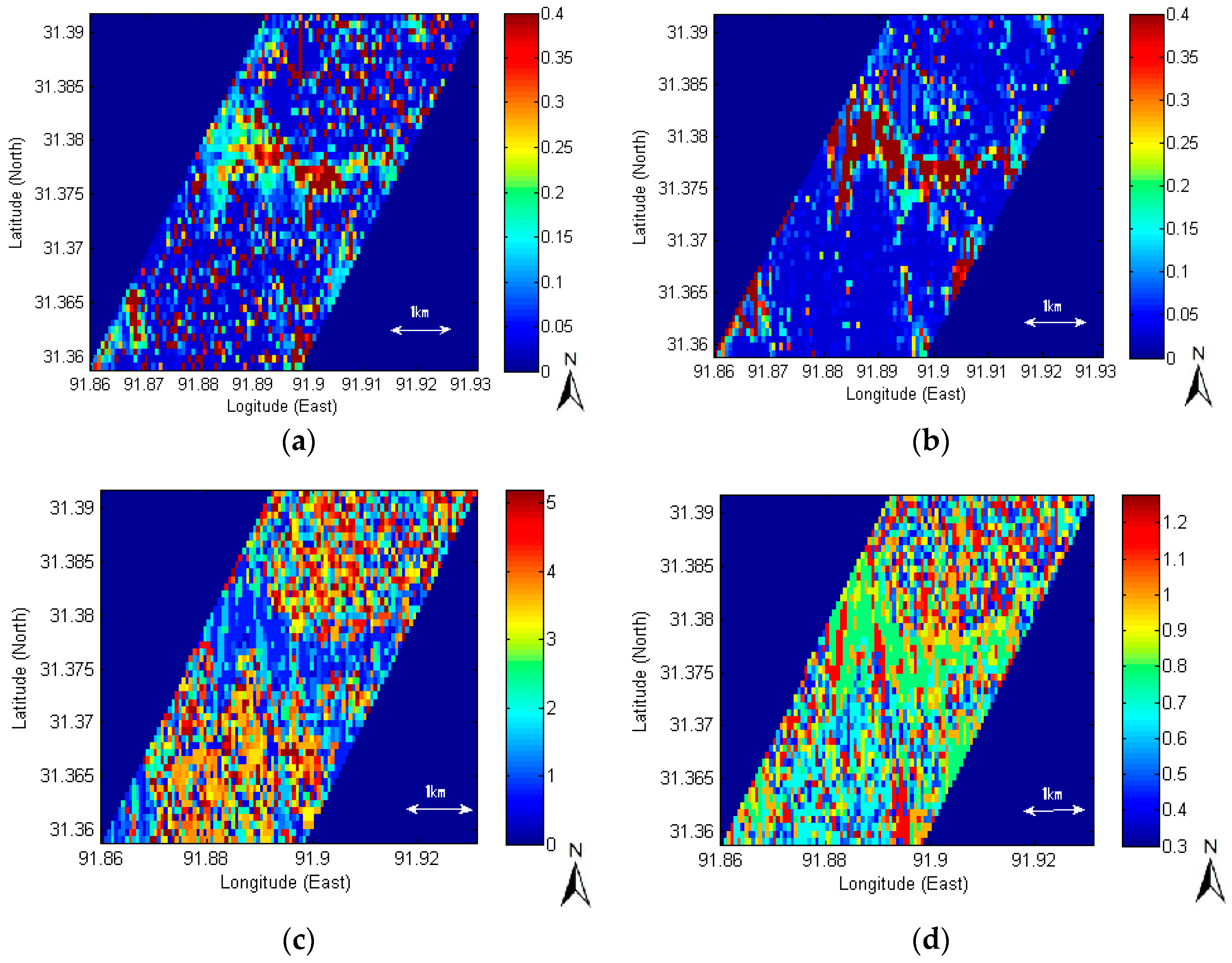
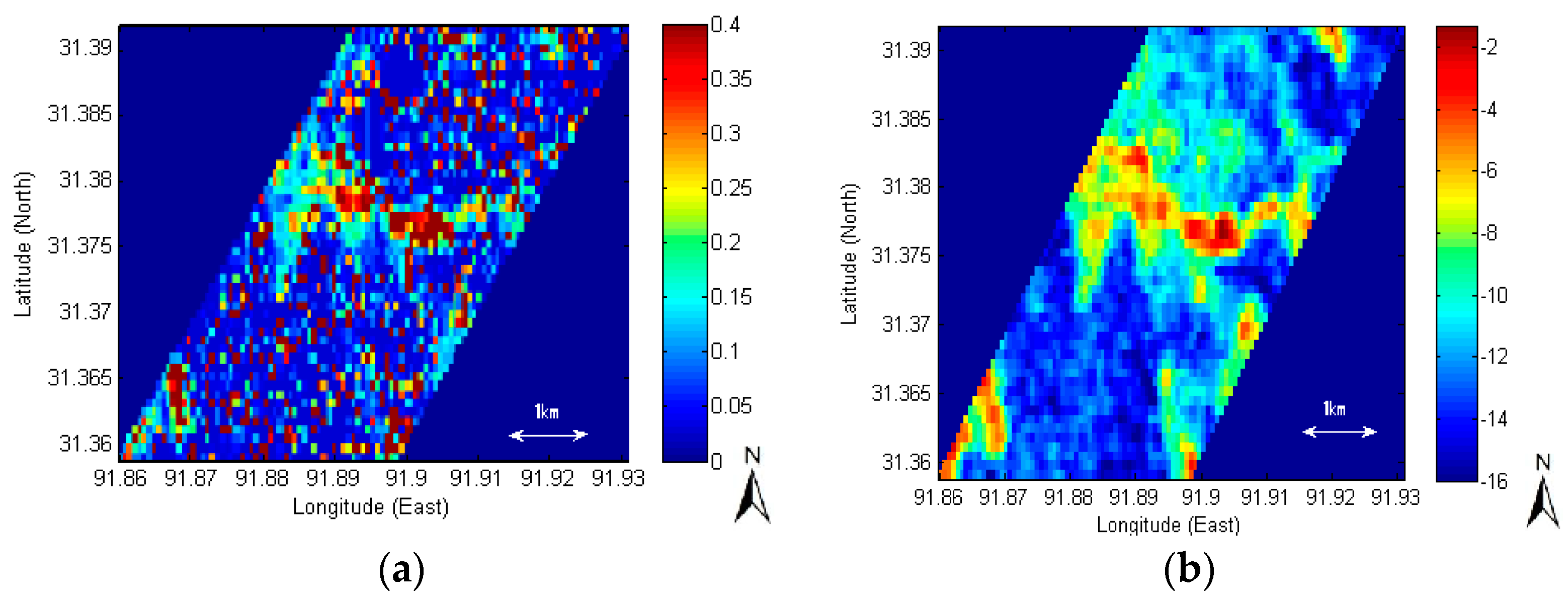
3.1.2. Impact of Roughness Errors on Soil Moisture Retrievals: Spatial Distribution
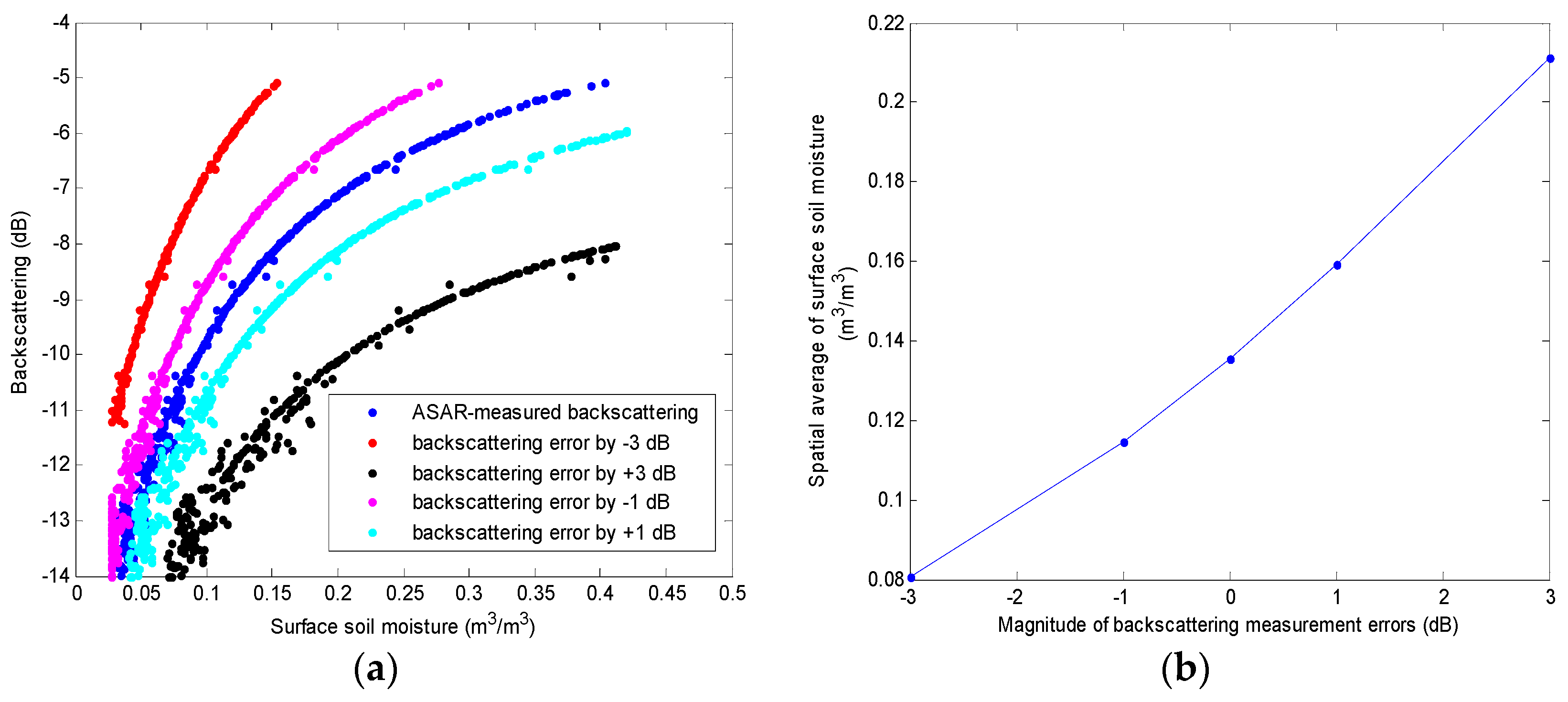
3.2. Propagation of ASAR Backscattering Errors on SAR Retrievals
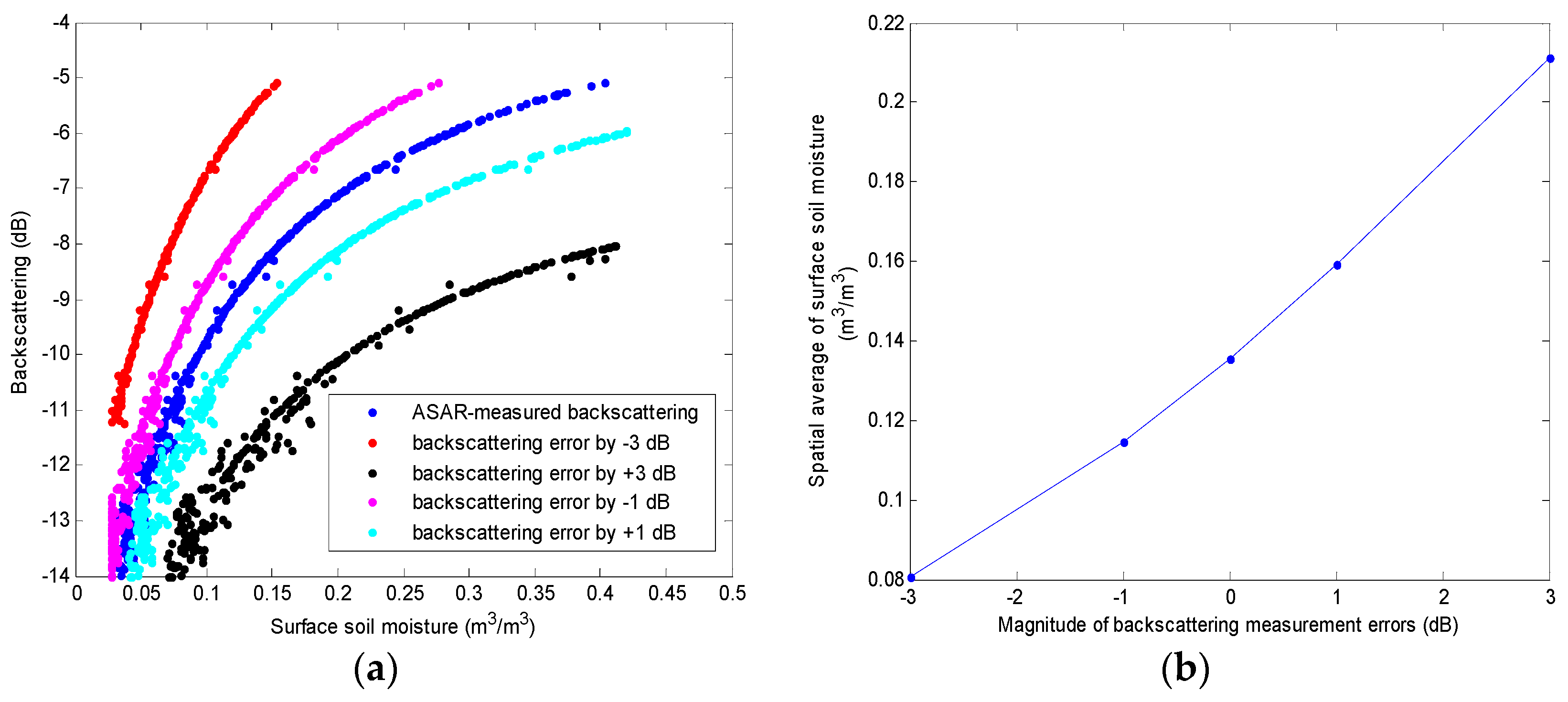
3.2.1. Impact of Backscattering Errors on the Relationship between Backscattering and Soil Moisture Retrievals: Pixel to Pixel Correspondence
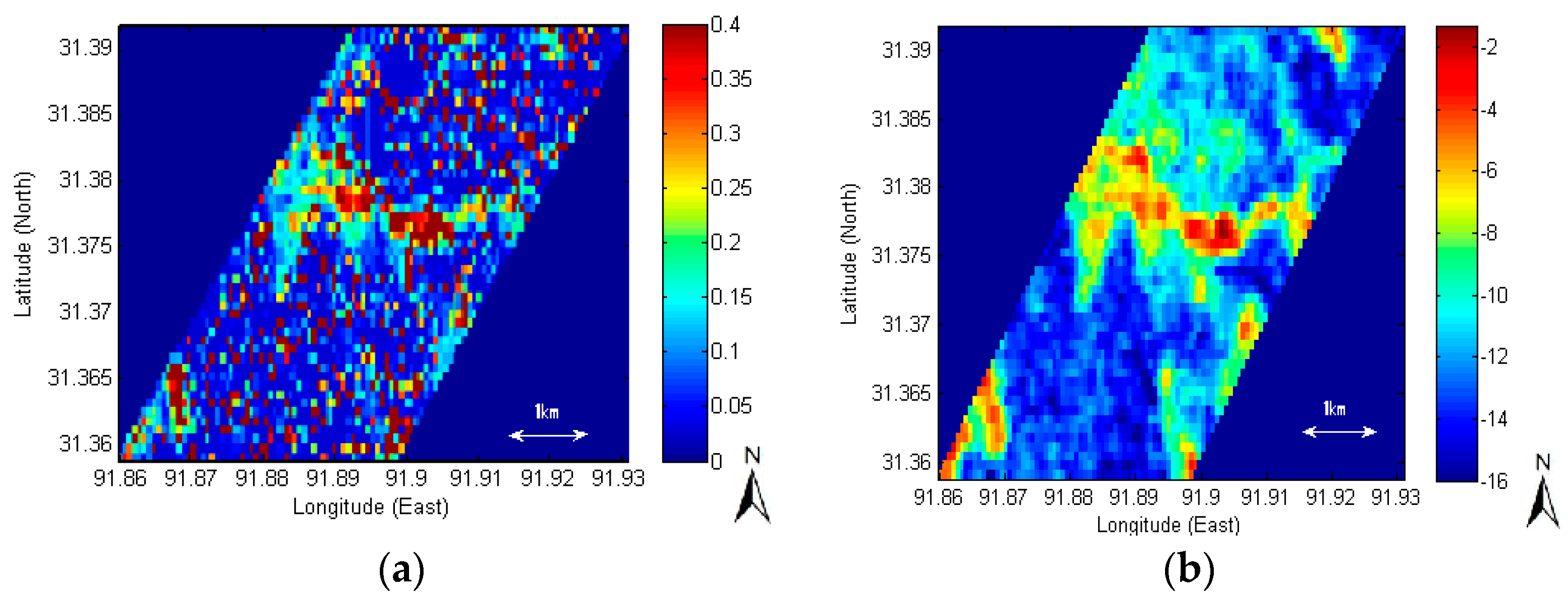
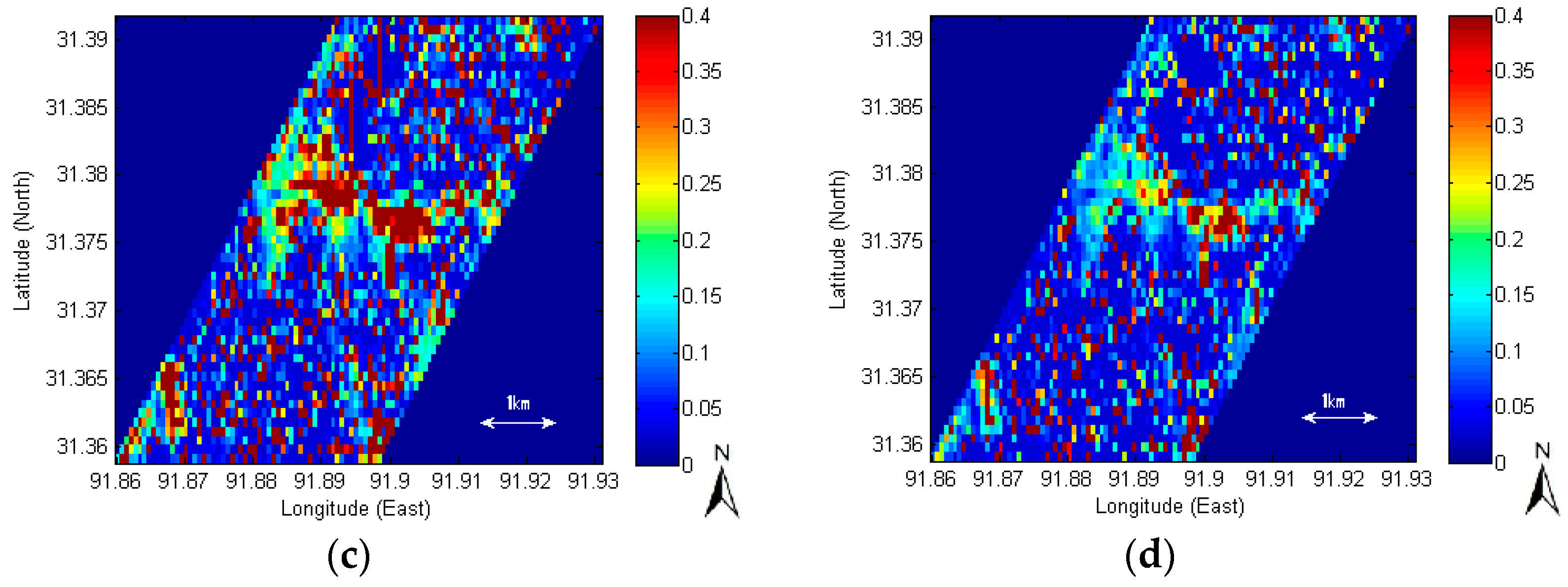
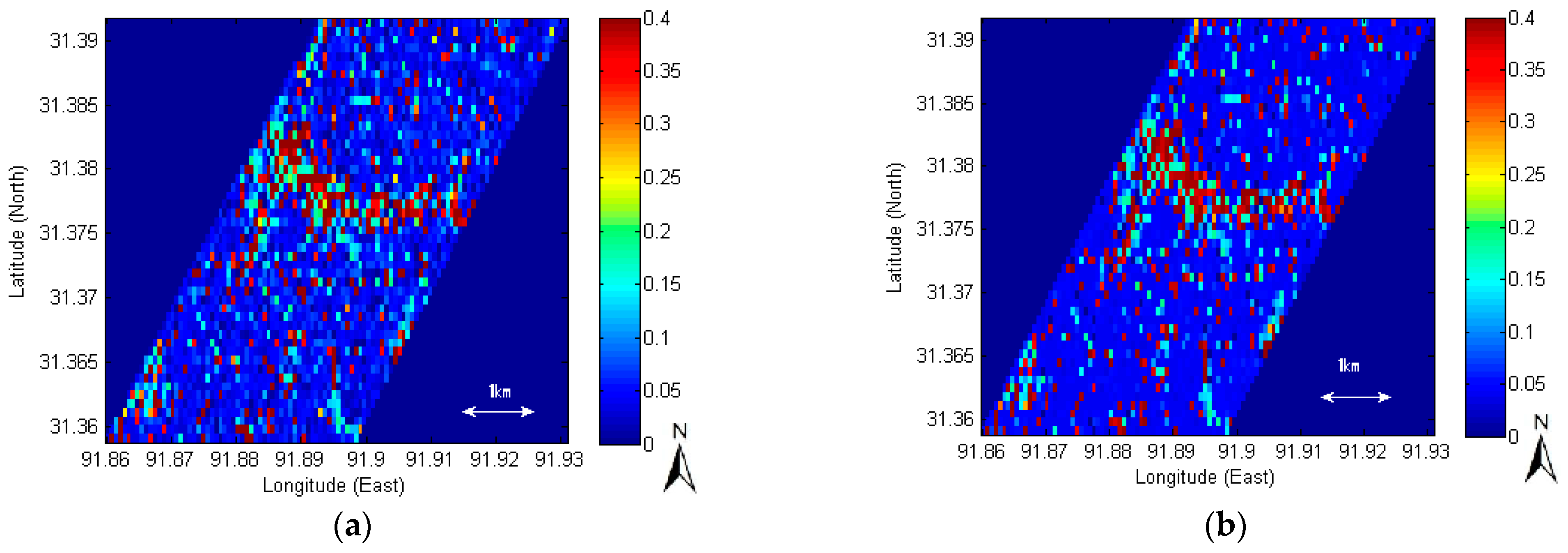
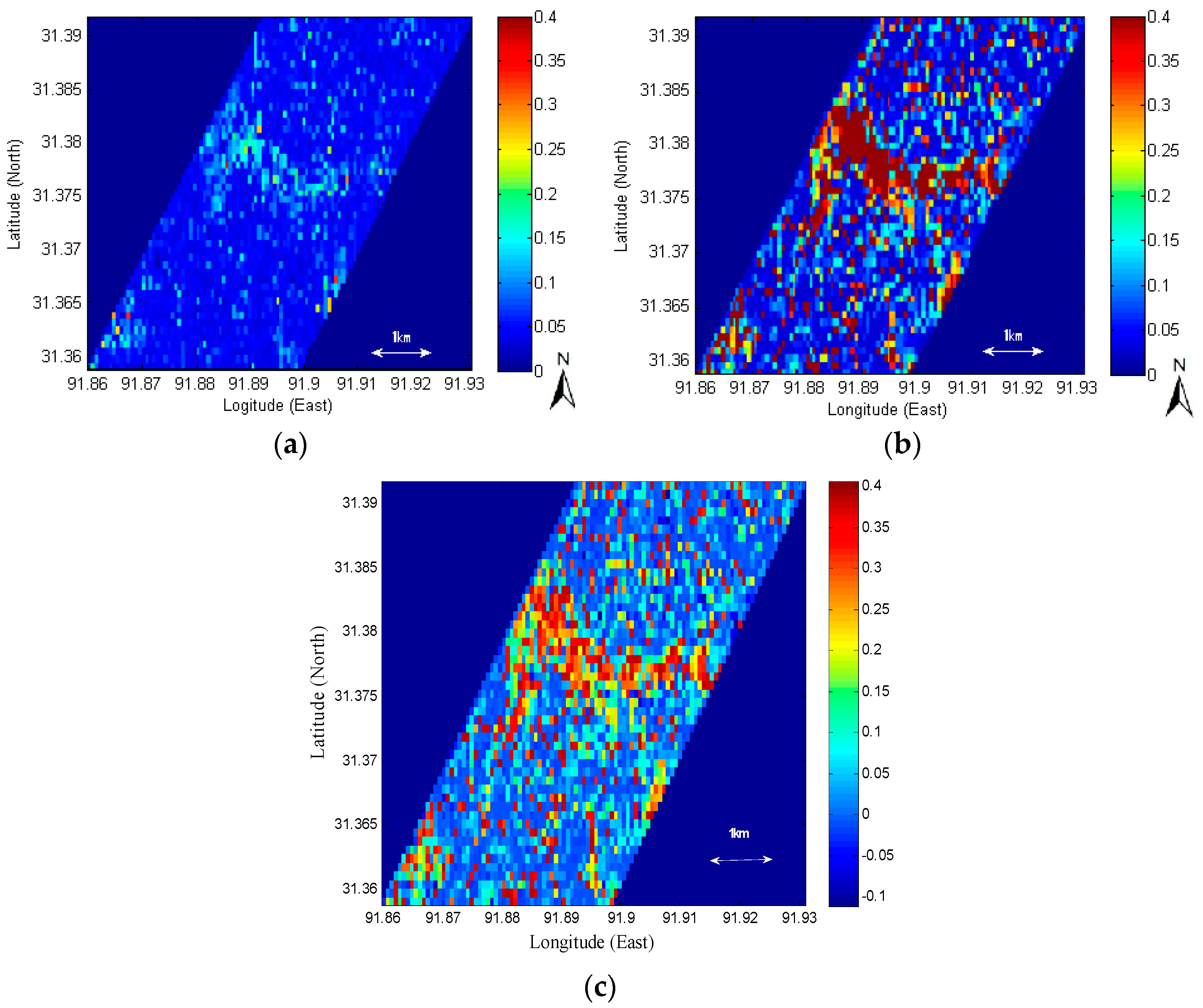
3.2.2. Impact of Backscattering Errors on Soil Moisture Retrievals: Spatial Distribution
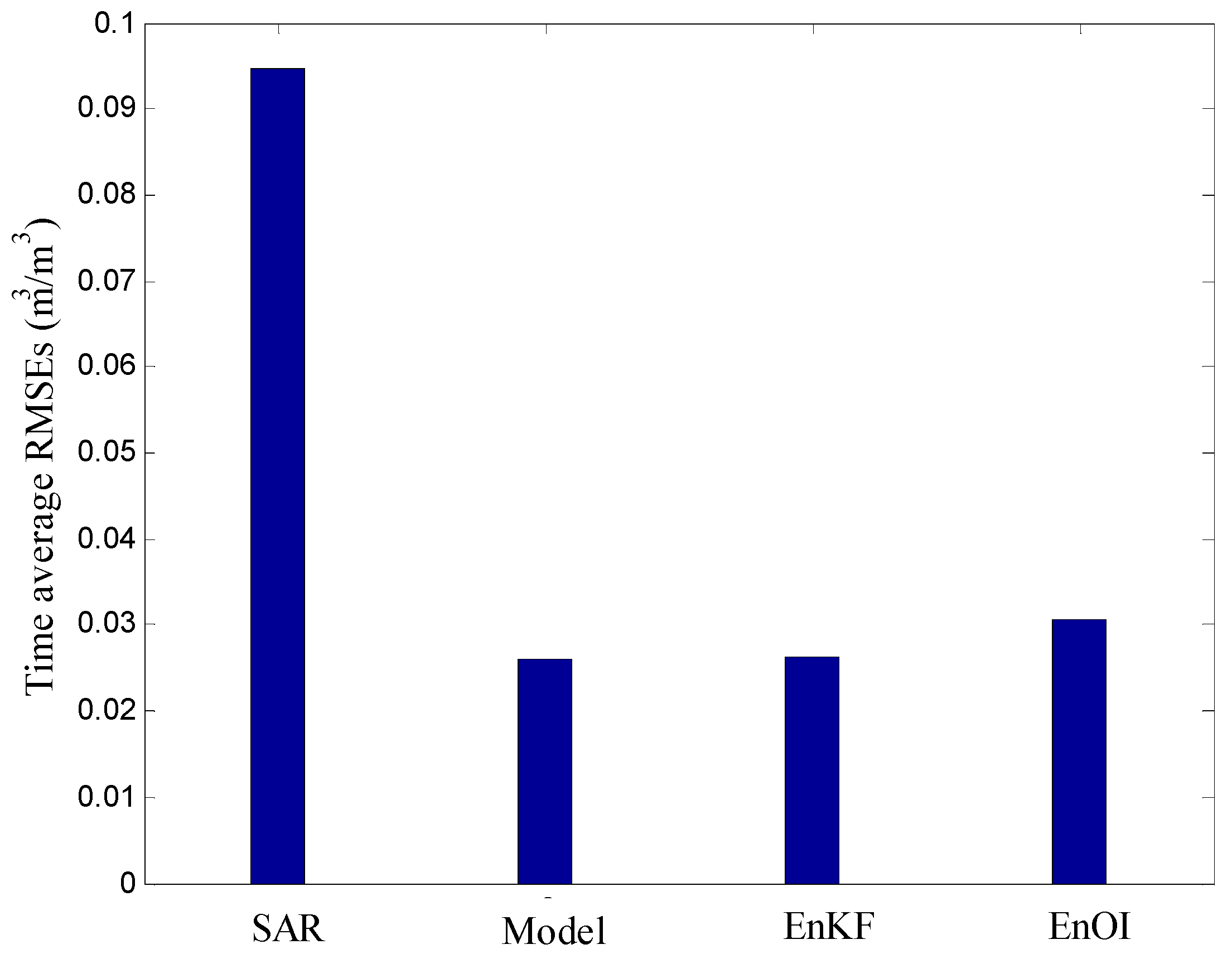
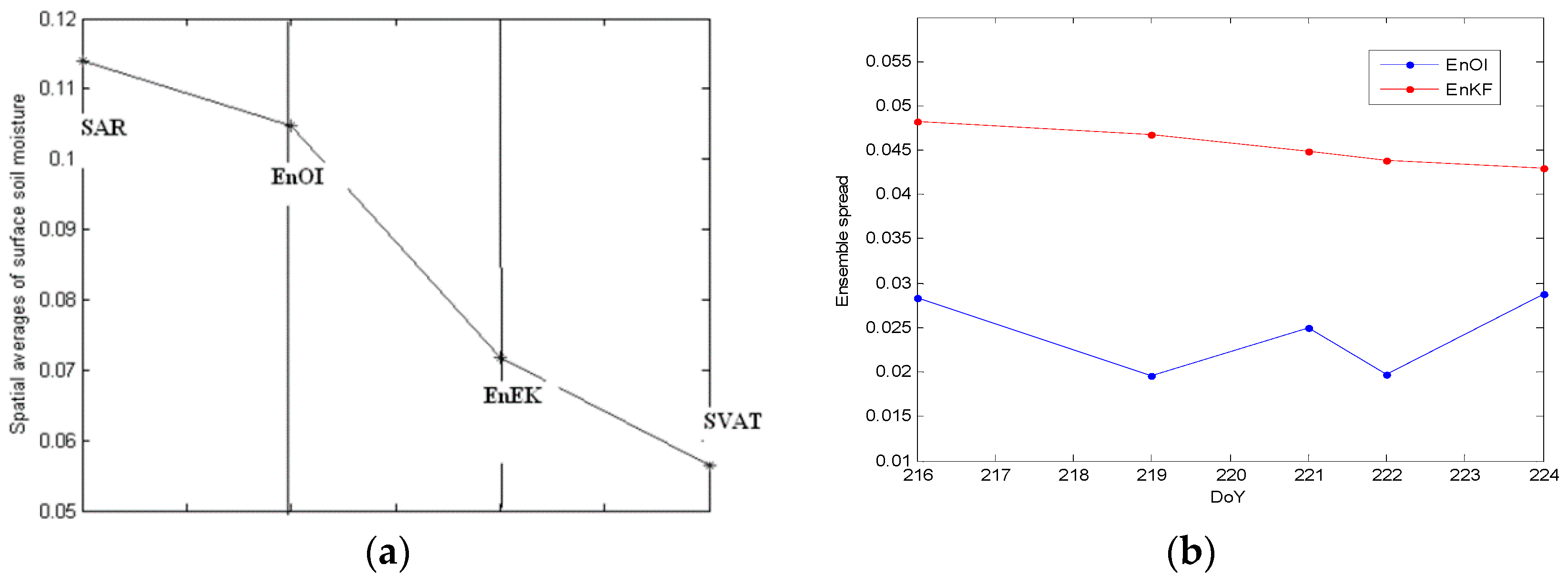
3.3. Validation of SAR Retrievals and Data Assimilation Analysis at a Local Point Scale
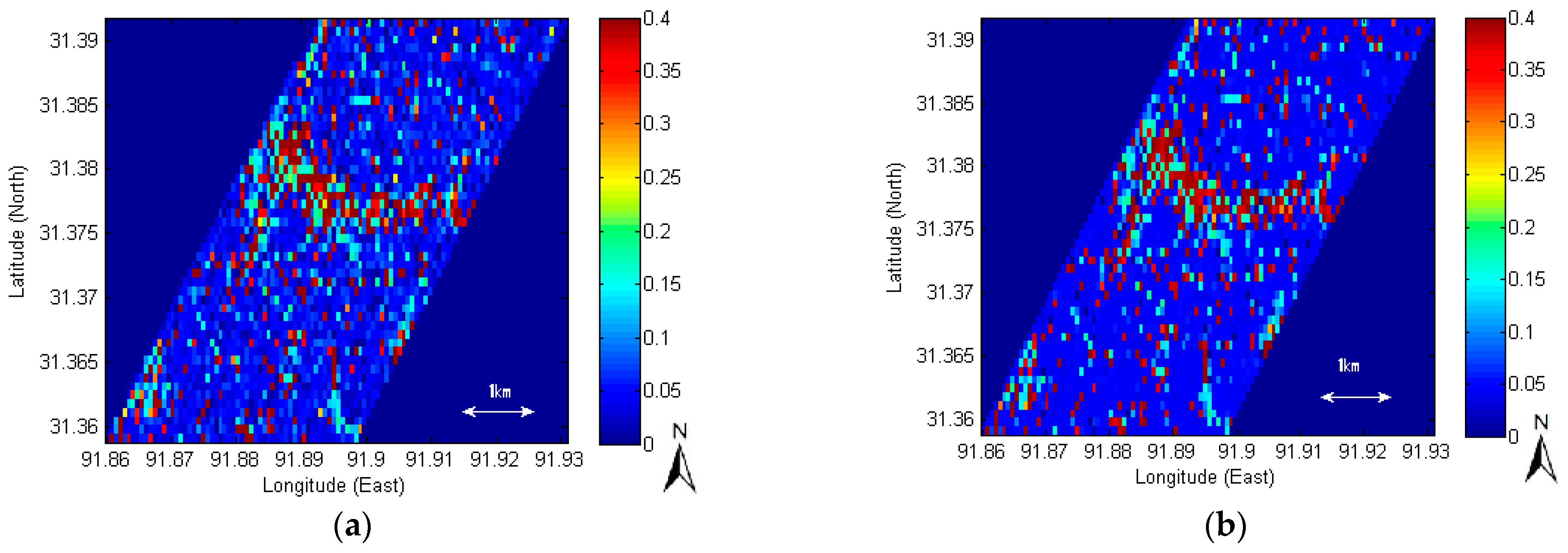
3.4. Spatial Comparison between SAR Retrievals and Land Surface Models
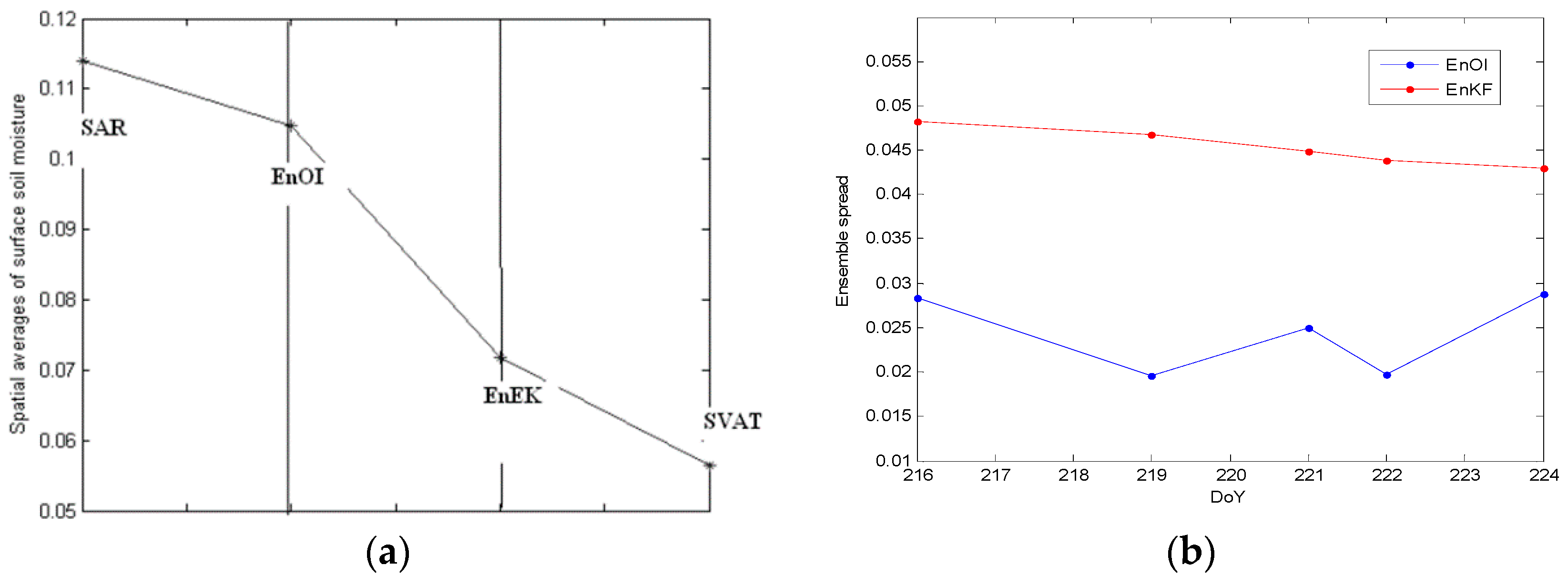
3.5. Spatial Comparison between SAR Retrievals and Data Assimilations
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Mattia, F.; Satalino, G.; Dente, L.; Pasquariello, G. Using a priori information to improve soil moisture retrieval from ENVISAT ASAR AP data in semiarid regions. IEEE Trans. Geosci. Remote Sens. 2006, 44, 900–912. [Google Scholar] [CrossRef]
- Verhoest, N.E.C.; de Baets, B.; Mattia, F.; Satalino, G.; Lucau, C.; Defourny, P. A possibilistic approach to soil moisture retrieval from ERS synthetic aperture radar backscattering under soil roughness uncertainty. Water Resour. Res. 2007, 43. [Google Scholar] [CrossRef]
- Chen, K.S.; Wu, T.D.; Tsang, L.; Li, Q.; Shi, J.; Fung, A.K. Emission of rough surfaces calculated by the integral Equation method with comparison to three-dimensional moment method simulations. IEEE Trans. Geosci. Remote Sens. 2003, 41, 90–101. [Google Scholar] [CrossRef]
- Fung, A.K. Microwave Scattering and Emission Models and Their Applications; Artech House Publishers: Boston, MA, USA, 1994. [Google Scholar]
- Lievens, H.; Vernieuwe, H.; Álvarez-Mozos, J.; de Baets, B.; Verhoest, N.E. Error in radar-derived soil moisture due to roughness parameterization: An analysis based on synthetical surface profiles. Sensors 2009, 9, 1067–1093. [Google Scholar] [CrossRef] [PubMed]
- Ulaby, F.T.; Batlivala, P.P. Optimum radar parameters for mapping soil moisture. IEEE Trans.Geosci. Remote Sens. 1976, 14, 81–93. [Google Scholar] [CrossRef]
- Huang, C-H.; Bradford, J.M. Applications of a laser scanner to quantify soil microtopography. Soil Sci. Soc. Am. J. 1992, 56, 14–21. [Google Scholar]
- Van der Velde, R.; Su, Z.; van Oevelen, P.; Wen, J.; Ma, Y.; Salama, M.S. Soil moisture mapping over the central part of the Tibetan Plateau using a series of ASAR WS images. Remote Sens. Environ. 2012, 120, 175–187. [Google Scholar] [CrossRef]
- Rahman, M.M.; Moran, M.S.; Thoma, D.P.; Bryant, R.; Sano, E.E.; Holifield Collins, C.D.; Skirvin, S.; Kershner, C.; Orr, B.J. A derivation of roughness correlation length for parameterizing radar backscatter models. Int. J. Remote Sens. 2007, 28, 3995–4012. [Google Scholar] [CrossRef]
- Satalino, G.; Mattia, F.; Davidson, M.; Le Toan, T.; Pasquariello, G.; Borgeaud, M. On current limits of soil moisture retrieval from ERS-SAR data. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2438–2447. [Google Scholar] [CrossRef]
- Verhoest, N.E.; Lievens, H.; Wagner, W.; Álvarez-Mozos, J.; Moran, M.S.; Mattia, F. On the soil roughness parameterization problem in soil moisture retrieval of bare surfaces from synthetic aperture radar. Sensors 2008, 8, 4213–4248. [Google Scholar] [CrossRef]
- Draper, C.S.; Mahfouf, J.-F.; Walker, J.P. An EKF assimilation of AMSR-E soil moisture into the ISBA land surface scheme. J. Geophys. Res. 2009, 114. [Google Scholar] [CrossRef]
- Houser, P.R.; de Lannoy, G.J.M.; Walker, J.P. Land surface data assimilation. In Data Assimilation; Lahoz, W., Khattatov, B., Menard, R., Eds.; Springer-Verlag Berlin Heidelberg: Berlin, Germany, 2010; pp. 549–597. [Google Scholar]
- Reichle, R.; McLaughlin, D.; Entekhabi, D. Data assimilation using an ensemble Kalman filter technique. Mon. Weather Rev. 2002, 129, 123–137. [Google Scholar]
- Reichle, R. Data assimilation methods in the Earth sciences. Adv. Water Resour. 2008, 31, 1411–1418. [Google Scholar] [CrossRef]
- Crow, W.T.; Kustas, W.P.; Prueger, J.H. Monitoring root-zone soil moisture through the assimilation of a thermal remote sensing-based soil moisture proxy into a water balance model. Remote Sens. Environ. 2008, 112, 1268–1281. [Google Scholar] [CrossRef]
- Dunne, S.; Entekhabi, D. Land surface state and flux estimation using the ensemble Kalman smoother during the Southern Great Plains 1997 field experiment. Water Resour Res. 2006, 42. [Google Scholar] [CrossRef]
- Hoeben, R.; Troch, P.A. Assimilation of active microwave obser-vation data for soil moisture profile estimation. Water Resour. Res. 2000, 36, 2805–2819. [Google Scholar] [CrossRef]
- Houser, P.R.; Shuttle worth, W.J.; Gupta, H.V. Integration of soil moisture remote sensing and hydrologic modeling using data assimilation. Water Resour. Res. 1998, 34, 3405–3420. [Google Scholar] [CrossRef]
- Huang, C.; Li, X.; Lu, L.; Gu, J. Experiments of one-dimensional soil moisture assimilation system based on ensemble Kalman filter. Remote Sens. Environ. 2008, 112, 888–900. [Google Scholar] [CrossRef]
- Loew, A.; Schwank, M.; Schlenz, F. Assimilation of an L-band microwave soil moisture proxy to compensate for uncertainties in precipitation data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2606–2616. [Google Scholar] [CrossRef]
- Margulis, S.A.; McLaughlin, D.; Entekhabi, D.; Dunne, S. Land data assimilation and estimation of soil moisture using measurements from the Southern Great Plains 1997 Field Experiment. Water Resour. Res. 2002, 38. [Google Scholar] [CrossRef]
- Reichle, R.H.; Koster, R.D. Bias reduction in short records of satellite soil moisture. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Crow, W.T.; Berg, A.A.; Cosh, M.H.; Loew, A.; Mohanty, B.P.; Panciera, R.; de Rosnay, P.; Ryu, D.; Walker, J.P. Upscaling sparse ground-based soil moisture observations for the validation of coarse-resolution satellite soil moisture products. Rev. Geophys. 2012, 50. [Google Scholar] [CrossRef]
- Lee, J.H.; Im, J. A novel bias correction method for SMOS soil moisture: Retrieval ensembles. Remote Sens. 2015, 7, 16045–16061. [Google Scholar] [CrossRef]
- Reichle, R.H.; Koster, R.D.; Liu, P.; Mahanama, S.P.; Njoku, E.G.; Owe, M. Comparison and assimilation of global soil moisture retrievals from the Advanced Microwave Scanning Radiometer for the Earth Observing System (AMSR-E) and the Scanning Multichannel Microwave Radiometer (SMMR). J. Geophys. Res. 2007, 112. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, Y.; Wu, R.; Hu, Z.; Yang, K.; Li, M.; Ma, W.; Zhong, L.; Sun, F.; Chen, X.; et al. Recent advances on the study of atmosphere-land interaction observations on the Tibetan Plateau. Hydrol. Earth Syst. Sci. 2009, 13, 1103–1111. [Google Scholar] [CrossRef]
- Lee, J.H. Spatial-scale prediction of the SVAT soil hydraulic variables characterizing stratified soils on the Tibetan Plateau from an EnKF analysis of SAR soil moisture. Vadose Zone J. 2014, 13. [Google Scholar] [CrossRef]
- Lee, J.H.; Timmermans, J.; Su, Z.; Mancini, M. Calibration of aerodynamic roughness over the Tibetan Plateau with Ensemble Kalman Filter analysed heat flux. Hydrol. Earth Syst. Sci. 2012, 16, 4291–4302. [Google Scholar]
- De Jeu, R.A.M.; Wagner, W.W.; Holmes, T.R.H.; Dolman, A.J.; van de Giesen, N.C.; Friesen, J. Global soil moisture patterns observed by space borne microwave radiometers and scatterometers. Surv. Geophys. 2008, 28, 399–420. [Google Scholar] [CrossRef]
- Balsamo, G.; Albergel, C.; Beljaars, A.; Boussetta, S.; Brun, E.; Cloke, H.; Dee, D.; Dutra, E.; Muñoz-Sabater, J.; Pappenberger, F.; et al. ERA-Interim/Land: A global land surface reanalysis data set. Hydrol. Earth Syst. Sci. 2015, 19, 389–407. [Google Scholar] [CrossRef]
- Noilhan, J.; Planton, S. A simple parameterization of land surface processes for meteorological models. Mon. Weather Rev. 1989, 117, 536–549. [Google Scholar] [CrossRef]
- Noilhan, J.; Mahfouf, J.F. The ISBA land surface parameterization scheme. Glob. Planet. Chang. 1996, 13, 145–159. [Google Scholar] [CrossRef]
- Lee, J.H.; Pellarin, T.; Kerr, Y. Inversion of soil hydraulic properties from the DEnKF analysis of SMOS soil moisture over West Africa. Agric. Forest Meteorol. 2014, 188, 76–88. [Google Scholar] [CrossRef]
- Laur, H.; Bally, P.; Meadows, P.; Sanchez, J.; Schaettler, B.; Lopinto, E.; Esteban, D. Derivation of the Backscattering Coefficient σ° in ESA ERS SAR PRI Products; European Space Agency (ESA): Paris, France, 2004. [Google Scholar]
- Shi, J.C.; Wang, J.; Hsu, A.Y.; O′Neill, P.E.; Engman, E.T. Estimation of bare surface soil moisture and surface roughness parameter using L-Band SAR image data. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1254–1266. [Google Scholar]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive Volume II: Radar Remote Sensing and Surface Scattering and Emission Theory; Artech House Publishers: Norwood, MA, USA, 1982; p. 608. [Google Scholar]
- Su, Z.; Troch, P.A.; de Troch, F.P. Remote sensing of bare surface soil moisture using EMAC/ESAR data. Int. J. Remote Sens. 1997, 35, 1254–1266. [Google Scholar] [CrossRef]
- Evensen, G. The ensemble Kalman filter: Theoretical formulation and practical implementation. Ocean Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Sakov, P.; Oke, P.R. A deterministic formulation of the ensemble kalman filter: An alternative to ensemble square root filters. Tellus 2008, 60, 361–371. [Google Scholar] [CrossRef]
- Counillon, F.; Bertino, L. Ensemble optimal interpolation: Multivariate properties in the Gulf of Mexico. Tellus A 2009, 61, 296–308. [Google Scholar] [CrossRef]
- Lee, J.H.; Pellarin, T.; Kerr, Y. EnOI optimization of SMOS soil moisture over West Africa. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1821–1829. [Google Scholar] [CrossRef]
- Sano, E.E.; Huete, A.R.; Moran, M.S. Estimation of surface roughness in a semiarid region from C-band ERS-1 synthetic aperture radar data. Rev. Bras. Cienc. Solo 1999, 23, 903–908. [Google Scholar] [CrossRef]
- Escorihuela, M.J.; Kerr, Y.; Wigneron, J.P.; Calvet, J.C.; Lemaître, F. A simple model of the bare soil microwave emission at L-Band. IEEE Trans.Geosci. Remote Sens. 2007, 45, 1978–1987. [Google Scholar] [CrossRef]
- Barrett, B.W.; Dwyer, E.; Whelan, P. Soil moisture retrieval from active spaceborne microwave observations: An evaluation of current techniques. Remote Sens. 2009, 1, 210–242. [Google Scholar] [CrossRef]
- Altese, E.; Bolognani, O.; Mancini, M.; Troch, P.A. Retrieving soil moisture over bare soil from ERS 1 synthetic aperture radar data: Sensitivity analysis based on a theoretical surface scattering model and field data. Water Resour. Res. 1996, 32, 653–661. [Google Scholar] [CrossRef]
- Taconet, O.; Vidal-Madjar, D.; Emblanch, C.; Normand, M. Taking into account vegetation effects to estimate soil moisture from C-band radar measurements. Remote Sens. Environ. 1996, 56, 52–56. [Google Scholar]
- Bindlish, R.; Barros, A.P. Parameterization of vegetation backscatter in radar-based, soil moisture estimation. Remote Sens. Environ. 2000, 76, 130–137. [Google Scholar] [CrossRef]
- Scipal, K. Global Soil Moisture Retrieval from ERS Scatterometer Data. Ph.D. Thesis, Vienna University of Technology, Vienna, Austria, 2002. [Google Scholar]
- Desroziers, G.; Berre, L.; Chapnik, B.; Poli, P. Diagnosis of observation, background and analysis error statistics in observation space. Q. J. R. Meteorol. Soc. 2005, 131, 3385–3396. [Google Scholar] [CrossRef]
- Oke, P.R.; Sakov, P.; Corney, S.P. Impacts of localisation in the EnKF and EnOI: Experiments with a small model. Ocean Dyn. 2007, 57, 32–45. [Google Scholar] [CrossRef]
- Anderson, J.L. Exploring the need for localization in ensemble data assimilation using a hierarchical ensemble filter. Phys. D Nonlinear Phenom. 2007, 230, 99–111. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S Scheme No. | RMS Height (cm) |
|---|---|
| 1 | 0.05–0.95 |
| 2 | 0.1–1.0 |
| 3 | 0.3–1.2 |
| 4 | 0.4–1.3 |
| S Scheme No. | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Roughness (cm) | ||||
| - | 0.218 | 0.246 | 0.365 | 0.438 |
| Resultant soil moisture retrievals (m3/m3) | ||||
| - | 0.1449 | 0.1356 | 0.1080 | 0.1054 |
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.H. Sequential Ensembles Tolerant to Synthetic Aperture Radar (SAR) Soil Moisture Retrieval Errors. Geosciences 2016, 6, 19. https://doi.org/10.3390/geosciences6020019
Lee JH. Sequential Ensembles Tolerant to Synthetic Aperture Radar (SAR) Soil Moisture Retrieval Errors. Geosciences. 2016; 6(2):19. https://doi.org/10.3390/geosciences6020019
Chicago/Turabian StyleLee, Ju Hyoung. 2016. "Sequential Ensembles Tolerant to Synthetic Aperture Radar (SAR) Soil Moisture Retrieval Errors" Geosciences 6, no. 2: 19. https://doi.org/10.3390/geosciences6020019
APA StyleLee, J. H. (2016). Sequential Ensembles Tolerant to Synthetic Aperture Radar (SAR) Soil Moisture Retrieval Errors. Geosciences, 6(2), 19. https://doi.org/10.3390/geosciences6020019