Feasibility of Objective Seabed Mapping Techniques in a Coastal Tidal Environment (Wadden Sea, Germany)

 , , ,
, , , 
Abstract
1. Introduction
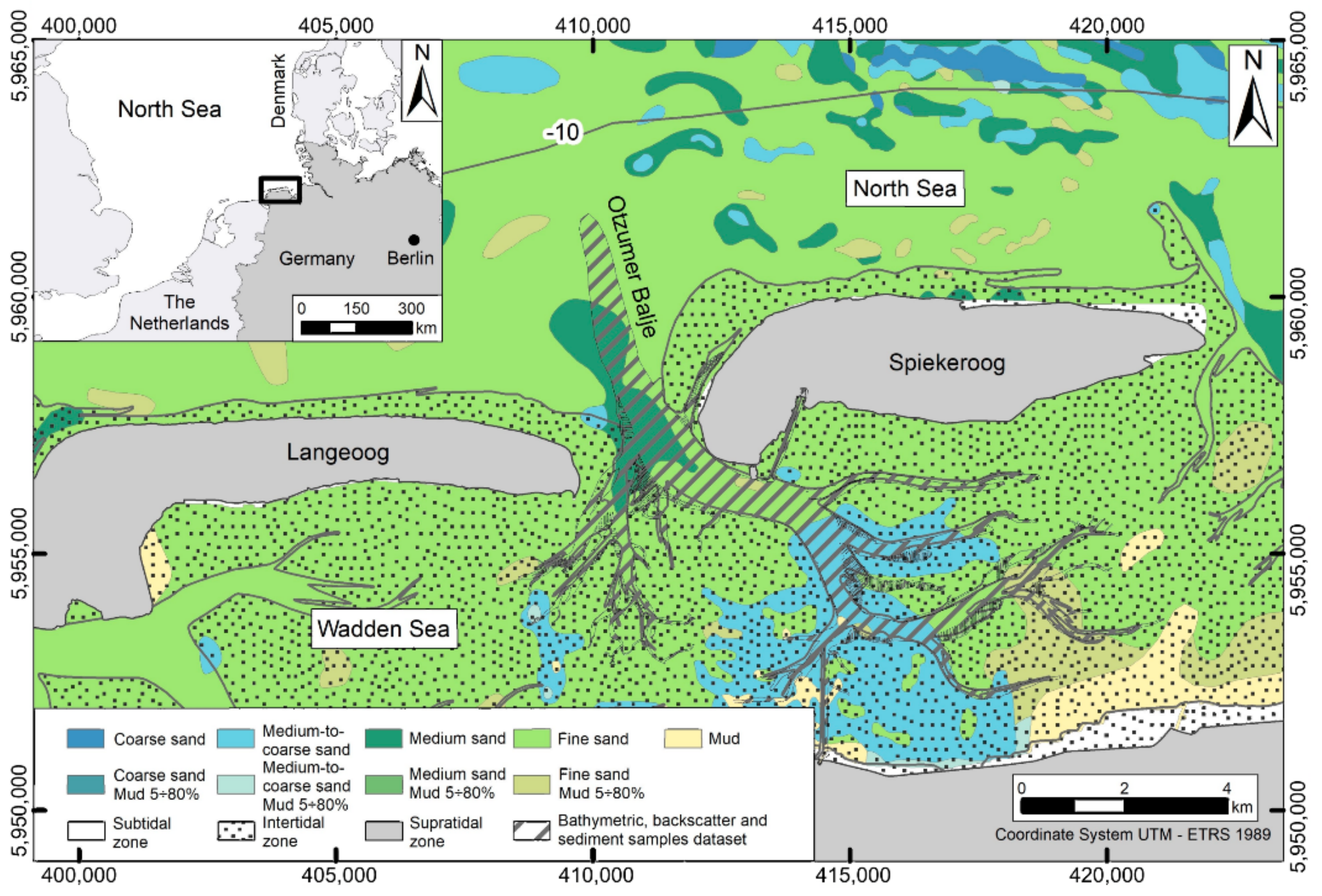
2. Study Area
3. Materials and Methods
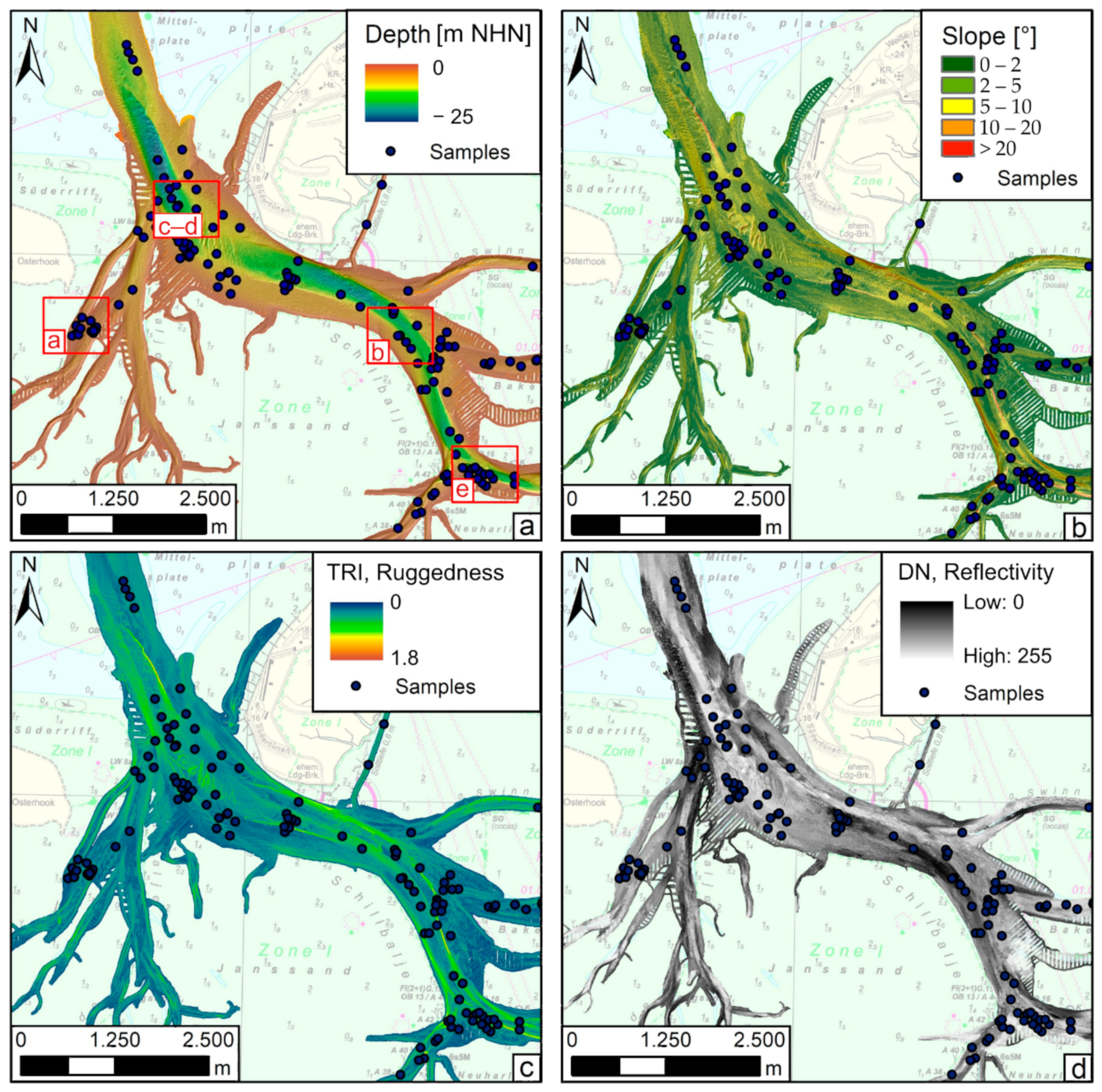
3.1. Datasets
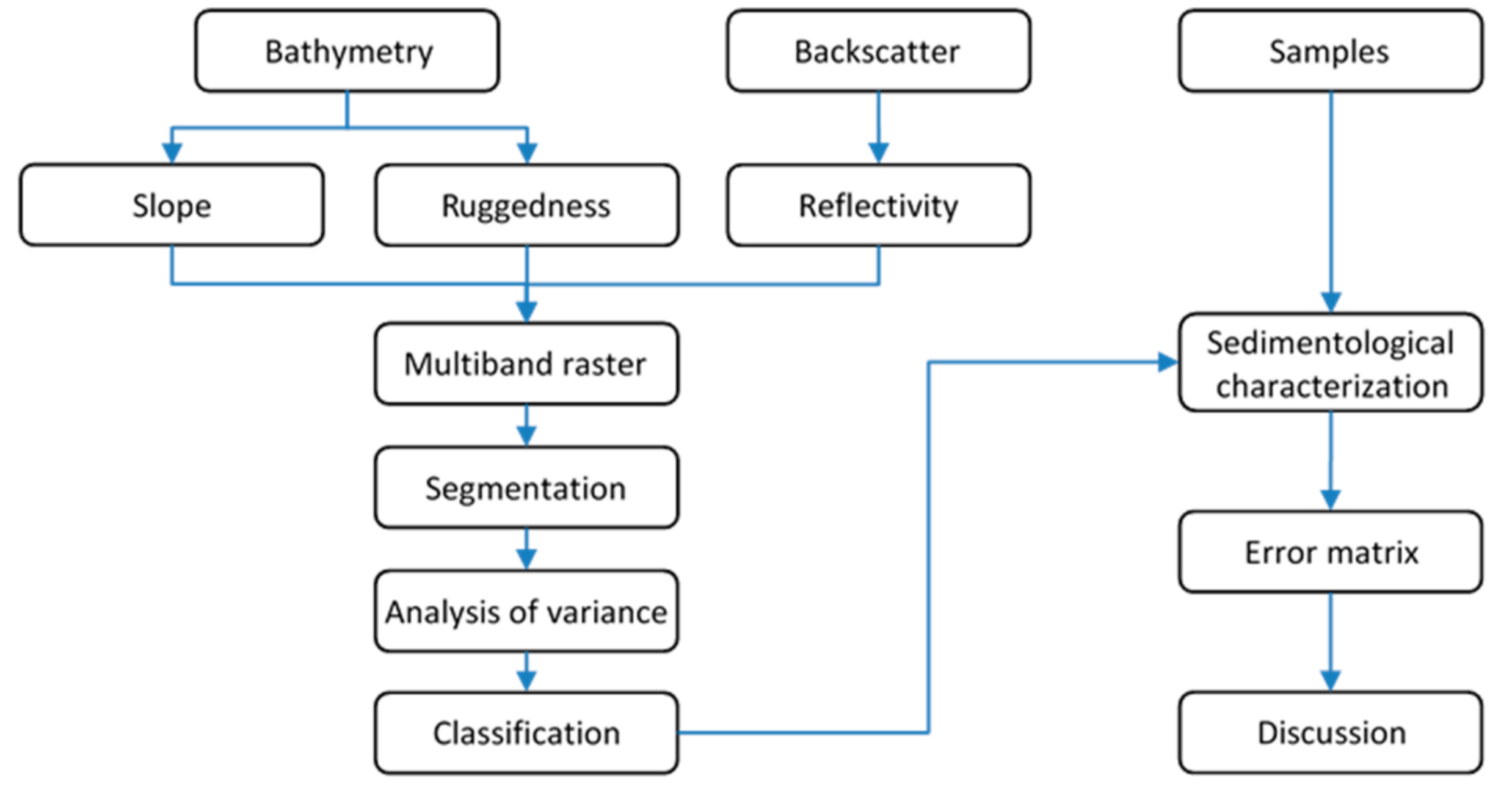
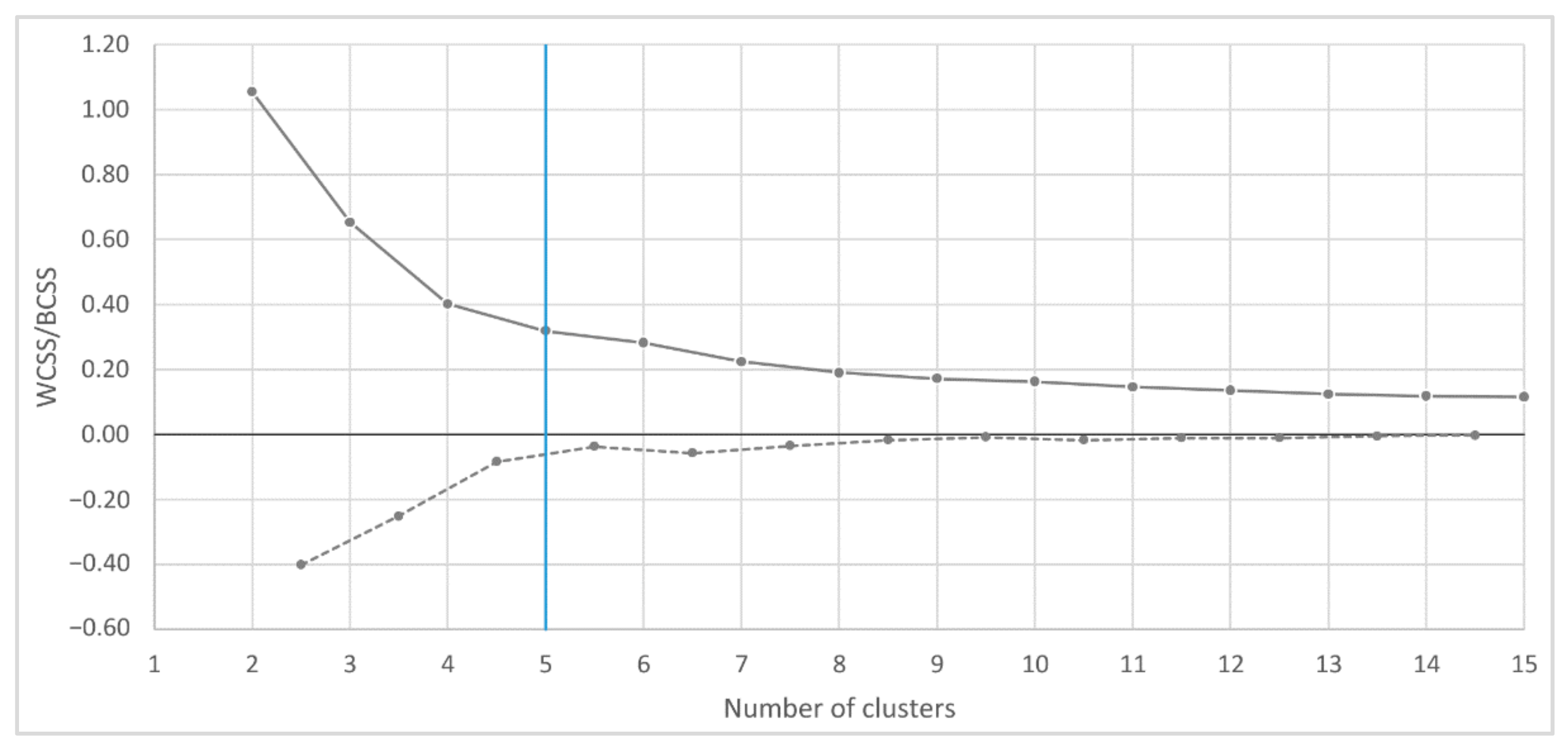
3.2. Segmentation and Classification of Hydro-Acoustic Data
3.3. Seabed Characterization and Validation of Results
4. Results
4.1. Seabed Segmentation and Classification
4.2. Sediment Analysis
4.3. Seabed Characterization
5. Discussion
5.1. Assessment of Accuracy
5.2. Analysis of Inconsistencies
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Buhl-Mortensen, L.; Buhl-Mortensen, P.; Dolan, M.F.J.; Holte, B. The MAREANO Programme—A full coverage mapping of the norwegian off-shore benthic environment and fauna. Mar. Biol. Res. 2015, 11, 4–17. [Google Scholar] [CrossRef]
- Kloepper, S.; Baptist, M.J.; Bostelmann, A.; Busch, J.A.; Buschbaum, C.; Gutow, L.; Janssen, G.; Jensen, K.; Jørgensen, H.P.; de Jong, F.; et al. Wadden Sea Quality Status Report 2017; Common Wadden Sea Secretariat: Wilhelmshaven, Germany, 2017; Available online: https://qsr.waddensea-worldheritage.org/reports/subtidal-habitats (accessed on 11 February 2020).
- Kaskela, A.; Kotilainen, A.; Alanen, U.; Cooper, R.; Green, S.; Guinan, J.; van Heteren, S.; Kihlman, S.; Van Lancker, V.; Stevenson, A.; et al. Picking up the pieces—Harmonising and collating seabed substrate data for European Maritime Areas. Geosciences 2019, 9, 84. [Google Scholar] [CrossRef]
- Lucieer, V.; Barrett, N.; Butler, C.; Flukes, E.; Ierodiaconou, D.; Ingleton, T.; Jordan, A.; Monk, J.; Meeuwig, J.; Porter-Smith, R.; et al. A seafloor habitat map for the Australian continental shelf. Sci. Data 2019, 6, 120. [Google Scholar] [CrossRef] [PubMed]
- Beaudoin, J.; Hughes Clarke, J.E.; Van den Ameele, E.J.; Gardner, J.V. Geometric and radiometric correction of multibeam backscatter derived from Reson 8101 systems. In Proceedings of the Canadian Hydrographic Conference, Toronto, ON, Canada, 15–19 April 2002. [Google Scholar]
- Lurton, X. An Introduction to Underwater Acoustics. Principles and Applications, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2010; p. 680. [Google Scholar]
- Brown, C.J.; Todd, B.J.; Kostylev, V.E.; Pickrill, R.A. Image-based classification of multibeam sonar backscatter data for objective surficial sediment mapping of Georges Bank, Canada. Cont. Shelf Res. 2011, 31, 110–119. [Google Scholar] [CrossRef]
- Ismail, K.; Huvenne, V.A.; Masson, D.G. Objective automated classification technique for marine landscape mapping in submarine canyons. Mar. Geol. 2015, 362, 17–32. [Google Scholar] [CrossRef]
- Diesing, M.; Green, S.L.; Stephens, D.; Lark, R.M.; Stewart, H.A.; Dove, D. Mapping seabed sediments: Comparison of manual, geostatistical, object–based image analysis and machine learning approaches. Cont. Shelf Res. 2014, 84, 107–119. [Google Scholar] [CrossRef]
- Lüders, K. Die Entstehung der ostfriesischen Inseln und der Einfluß der Dünenbildung auf den geologischen Aufbau der ostfriesischen Küste. Probl. Küstenforschung Südlichen Nordseegebiet 1953, 5, 5–14. [Google Scholar]
- Streif, H. Sedimentary record of Pleistocene and Holocene marine inundations along the North Sea coast of Lower Saxony, Germany. Quat. Int. 2004, 112, 3–28. [Google Scholar] [CrossRef]
- Figge, K. Begleitheft zur Karte der Sedimentkartierung in der Deutschen Bucht 1:250.000 Nr. 2900; Bundesamt für Seeschifffahrt und Hydrographie BSH: Hamburg, Germany, 1981. [Google Scholar]
- Zeiler, M.; Schwarzer, K.; Ricklefs, K. Seabed morphology and sediment dynamics. Küste 2008, 74, 31–44. [Google Scholar]
- Flemming, B.W.; Davis, R.A., Jr. Holocene evolution, morphodynamics and sedimentology of the Spiekeroog barrier island system (southern North Sea). Senckenbergiana Marit. 1994, 24, 117–155. [Google Scholar]
- Son, C.S.; Flemming, B.W.; Bartholomä, A. Evidence for sediment recirculation on an ebb–tidal delta of the East Frisian barrier–island system, southern North Sea. Geo Mar. Lett. 2011, 31, 87–100. [Google Scholar] [CrossRef]
- Ladage, F.; Meyer, C.; Stephan, H.J.; Niemeyer, H.D. Morphologische Entwicklung im Seegat Otzumer Balje und seinem Einzugsgebiet. In Untersuchungsbericht 2/2006; NLWKN-Forschungsstelle Küste: Norderney, Germany, 2006; p. 63. [Google Scholar]
- Meyer, C. Morphodynamische Analysen im Bereich des Norderneyer Seegats und seines Einzugsgebietes. In Untersuchungsbericht 1/2014; NLWKN-Forschungsstelle Küste: Norderney, Germany, 2014; p. 23. [Google Scholar]
- Mascioli, F.; Bremm, G.; Bruckert, P.; Tants, R.; Dirks, H.; Wurpts, A. The contribution of geomorphometry to the seabed characterization of tidal inlets (Wadden Sea, Germany). Z. Geomorphol. 2017, 61, 179–197. [Google Scholar] [CrossRef]
- Blott, S.J.; Pye, K. Gradistat: A grain size distribution and statistics package for the analysis of unconsolidated sediments. Earth Surf. Process. Landf. 2001, 26, 1237–1248. [Google Scholar] [CrossRef]
- Folk, R.L. The distinction between grain size and mineral composition in sedimentary–rock nomenclature. J. Geol. 1954, 62, 344–359. [Google Scholar] [CrossRef]
- Bundesamt für Seeschifffahrt und Hydrographie. Anleitung zur Kartierung des Meeresbodens Mittels Hochauflösender Sonare in den Deutschen Meeresgebieten; Bundesamt für Seeschifffahrt und Hydrographie BSH: Hamburg, Germany, 2016; p. 147. [Google Scholar]
- Fonseca, L.; Calder, B. Geocoder: An efficient backscatter map constructor. In Proceedings of the U.S. Hydrographic Conference, San Diego, CA, USA, 29–31 March 2005. [Google Scholar]
- Riley, S.J.; De Gloria, S.D.; Elliot, R. A terrain ruggedness index that quantifies topographic heterogeneity. Int. J. Sci. 1999, 5, 23–27. [Google Scholar]
- Miccadei, E.; Mascioli, F.; Piacentini, T. Quaternary geomorphological evolution of the Tremiti Islands (Puglia, Italy). Quat. Int. 2011, 233, 3–15. [Google Scholar] [CrossRef]
- Lucieer, V. Object-oriented classification of side scan sonar data for mapping benthic marine habitats. Int. J. Remote Sens. 2008, 29, 905–921. [Google Scholar] [CrossRef]
- Comaniciu, D.; Meer, P. Mean shift: A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef]
- Richards, J.A. Remote Sensing Digital Image Analysis: An Introduction; Springer: Berlin/Heidelberg, Germany, 1986; p. 281. [Google Scholar]
- Forgy, E.W. Cluster analysis of multivariate data: Efficiency versus interpretability of classifications. Biometrics 1965, 21, 768–769. [Google Scholar]
- Charrad, M.; Ghazzali, N.; Boiteau, V.; Niknafs, A. NbClust: An R package for determining the relevant number of clusters in a data set. J. Stat. Softw. 2014, 61, 1–36. [Google Scholar] [CrossRef]
- Williamson, D.F.; Parker, R.A.; Kendrick, J.S. The box plot: A simple visual method to interpret data. Ann. Intern. Med. 1989, 110, 916–921. [Google Scholar] [CrossRef] [PubMed]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Landis, J.R.; Koch, G.G. The measurement of observer agreement for categorical data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef]
- Micallef, A.; Le Bas, T.P.; Huvenne, V.A.; Blondel, P.; Hühnerbach, V.; Deidun, A. A multi-method approach for benthic habitat mapping of shallow coastal areas with high-resolution multibeam data. Cont. Shelf Res. 2012, 39–40, 14–26. [Google Scholar] [CrossRef]
- Mitchell, P.J.; Downie, A.-L.; Diesing, M. How good is my map? A tool for semi-automated thematic mapping and spatially explicit confidence assessment. Environ. Model. Softw. 2018, 108, 111–122. [Google Scholar] [CrossRef]
- Linklater, M.; Ingleton, T.C.; Kinsela, M.A.; Morris, B.D.; Allen, K.M.; Sutherland, M.D.; Hanslow, D.J. Techniques for classifying seabed morphology and composition on a subtropical–temperate continental shelf. Geosciences 2019, 9, 141. [Google Scholar] [CrossRef]
- Roche, M.; Degrendele, K.; De Mol, L. Constraints and limitations of multibeam echosounders Backscatter Strength measurements for monitoring the seabed. Surveyor and geologist point of view. In Proceedings of the GeoHab Conference, Rome, Italy, 6–10 May 2013. [Google Scholar]
- Bartholomä, A.; Capperucci, R.M.; Bungenstock, F.; Schaumann, R.M.; Toerbrock, L.; Enters, D.; Wehrmann, A.; Drews, E. Rekonstruktion versunkener Landschaften im ostfriesischen Wattenmeer—Ergebnisse aus den geophysikalischen Messungen und Kernbohrungen im Projekt WASA. Nachr. Marschenrates 2020, 57, 61–69. [Google Scholar]
- Kunde, T. Entwicklung eines 3D-Modells für den unmittelbaren Untergrund des niedersächsischen Wattenmeergebietes am Beispiel von Norderney. Nachr. Marschenrates 2020, 57, 79–80. [Google Scholar]
- Steele, B.M.; Winne, J.C.; Redmond, R.L. Estimation and mapping of misclassification probabilities for thematic land cover maps. Remote Sens. Environ. 1998, 66, 192–202. [Google Scholar] [CrossRef]
- Diesing, M.; Mitchell, P.J.; O’Keeffe, E.; Montereale Gavazzi, G.O.A.; Le Bas, T. Limitations of Predicting Substrate Classes on a Sedimentary Complex but Morphologically Simple Seabed. Remote Sens. 2020, 12, 3398. [Google Scholar] [CrossRef]
- Goff, J.A.; Kraft, B.J.; Mayer, L.A.; Schock, S.G.; Sommerfield, C.K.; Olson, H.C.; Gulick, S.P.S.; Nordfjord, S. Seabed characterization on the New Jersey middle and outer shelf: Correlability and spatial variability of seafloor sediment properties. Mar. Geol. 2004, 209, 147–172. [Google Scholar] [CrossRef]
- Goff, J.A.; Olson, H.C.; Duncan, C.S. Correlation of side-scan backscatter intensity with grain-size distribution of shelf sediments, New Jersey margin. Geo Mar. Lett. 2000, 20, 43–49. [Google Scholar] [CrossRef]
- Passchier, S.; Kleinhans, M.G. Observations of sand waves, megaripples, and hummocks in the Dutch coastal area and their relation to currents and combined flow conditions. J. Geophys. Res. 2005, 110, 15. [Google Scholar] [CrossRef]
- Svenson, C.; Ernstsen, V.B.; Winter, C.; Bartholomä, A.; Hebbeln, D. Tide–driven sediment variations on a large compound dune in the Jade tidal inlet channel, Southeastern North Sea. J. Coast. Res. 2009, 56, 361–365. [Google Scholar]
- Lamarche, G.; Lurton, X.; Verdier, A.-L.; Augustin, J.-M. Quantitative characterization of seafloor substrate and bedforms using advanced processing of multibeam backscatter—Application to the Cook Strait, New Zealand. Cont. Shelf Res. 2011, 31, 93–109. [Google Scholar] [CrossRef]
- Van Oyen, T.; Blondeaux, P.; Van den Eynde, D. Sediment sorting along tidal sand waves: A comparison between field observations and theoretical predictions. Cont. Shelf Res. 2013, 63, 23–33. [Google Scholar] [CrossRef]
- Papili, S.; Jenkins, C.; Roche, M.; Wever, T.; Lopera, O.; Van Lancker, V. Influence of shells and shell debris on backscatter strength: Investigation using modeling, sonar measurements and sampling on the Belgian continental shelf. Proc. Inst. Acoust. 2015, 37, 304–310. [Google Scholar]
- Winter, C.; Lefebvre, A.; Becker, M.; Ferret, Y.; Ernsten, V.B.; Bartholdy, J.; Kwoll, E.; Flemming, B. Properties of active tidal bedforms. In Proceedings of the Marine and River Dune Dynamics Conference, MARID V, North Wales, UK, 4–6 April 2016. [Google Scholar]
- Koop, L.; Amiri-Simkooei, A.; van der Reijden, K.J.; O’Flynn, S.; Snellen, M.; Simons, D.G. Seafloor classification in a sand wave environment on the Dutch continental shelf using multibeam echosounder backscatter data. Geosciences 2019, 9, 142. [Google Scholar] [CrossRef]
- Mascioli, F.; Kunde, T. Grain size characterization of subtidal sediments of Lower Saxony. In Forschungsbericht 1/2017; NLWKN-Forschungsstelle Küste: Norderney, Germany, 2017; p. 24. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ground-Truth | |||||||
|---|---|---|---|---|---|---|---|
| OBIA-Clusters | MsM | S, fS | S, mS-mcS | cSED | HS | Total | Purity |
| 1 | 23 | 5 | 0 | 3 | 0 | 31 | 74.2% |
| 2 | 1 | 30 | 1 | 3 | 0 | 35 | 85.7% |
| 3 | 2 | 2 | 7 | 1 | 0 | 12 | 58.3% |
| 4 | 3 | 5 | 0 | 40 | 0 | 48 | 83.3% |
| 5 | 0 | 0 | 0 | 0 | 11 | 11 | 100.0% |
| Total | 29 | 42 | 8 | 47 | 11 | 137 | |
| Representation | 79.3% | 71.4% | 87.5% | 85.1% | 100.0% | ||
| Overall Accuracy = 81.0% | Kappa Coefficient = 0.74 | ||||||
| Sample | Predicted | G-T | C | G | P | Description |
|---|---|---|---|---|---|---|
| otz_001 | MsM, fS | S, fS | x | Similar reflectivity of S, fS and MsM, fS with bioturbation | ||
| otz_030 | MsM, fS | S, fS | x | 2.5 m from a S, fS area | ||
| otz_045 | MsM, fS | cSED, mcS | x | x | 8 m from a S, mcS area–Coarse fraction 8.6% | |
| otz_071 | MsM, fS | cSED, mcS | x | 50 m from a cSED, mcS area | ||
| otz_088 | MsM, fS | cSED, fS | x | 13 m from a cSED area | ||
| otz_093 | MsM, fS | S, fS | x | Small scaled sediment sorting on sand waves | ||
| otz_134 | MsM, fS | S, fS | x | 19 m from a S, fS area | ||
| otz_151 | MsM, fS | S, fS | x | Similar reflectivity of S, fS and MsM, fS with bioturbation | ||
| otz_049 | S, fS | MixSed, fS | x | x | Consistent sand fraction, coarse fraction 8.8%–1 m from a MsM, fS boundary | |
| otz_077 | S, fS | cSED, fS | x | Consistent sand fraction–coarse fraction 9.5% | ||
| otz_079 | S, fS | cSED, fS | x | Consistent sand fraction–coarse fraction 7.4% | ||
| otz_090 | S, fS | S, mS | x | fS–mS ratio very closed to the Figge boundary | ||
| otz_116 | S, fS | cSED, fS | x | Consistent sand fraction–coarse fraction 9.5% | ||
| otz_010 | S, mS–mcS | S, fS | x | Small scaled sediment sorting on sand waves | ||
| otz_046 | S, mS–mcS | S, fS | x | 13 m from a fS area | ||
| otz_084 | S, mS–mcS | S, cS | x | Small scaled sediment sorting on sand waves | ||
| otz_091 | S, mS–mcS | MsM, fS | x | Small sand waves on muddy layer–Classification consistent surficial sediment | ||
| otz_119 | S, mS–mcS | MsM, mS | x | Small sand waves on muddy layer–Classification consistent surficial sediment | ||
| otz_142 | S, mS–mcS | cSED, mcS | x | x | Collected on a boundary S, mcS. Consistent san–Coarse fraction 10% | |
| otz_144 | S, mS–mcS | S, fS | x | Small scaled sediment sorting on sand waves | ||
| otz_005 | cSED, fS–cS | S, fS | x | Small scaled sediment sorting on sand waves | ||
| otz_016 | cSED, fS–cS | MsM, fS | x | 10 m from a MsM area | ||
| otz_033 | cSED, fS–cS | S, fS | x | Small scaled sediment sorting on sand waves | ||
| otz_052 | cSED, fS–cS | MsM, fS | x | 5 m from a MsM area | ||
| otz_080 | cSED, fS–cS | MsM, fS | x | 10 m from a MsM area | ||
| otz_081 | cSED, fS–cS | S, fS | x | Small scaled sediment sorting on sand waves | ||
| otz_136 | cSED, fS–cS | S, fS | x | Small scaled sediment sorting on sand waves | ||
| otz_143 | cSED, fS–cS | S, fS | x | 17 m from a MsM area |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mascioli, F.; Piattelli, V.; Cerrone, F.; Gasprino, D.; Kunde, T.; Miccadei, E. Feasibility of Objective Seabed Mapping Techniques in a Coastal Tidal Environment (Wadden Sea, Germany). Geosciences 2021, 11, 49. https://doi.org/10.3390/geosciences11020049
Mascioli F, Piattelli V, Cerrone F, Gasprino D, Kunde T, Miccadei E. Feasibility of Objective Seabed Mapping Techniques in a Coastal Tidal Environment (Wadden Sea, Germany). Geosciences. 2021; 11(2):49. https://doi.org/10.3390/geosciences11020049
Chicago/Turabian StyleMascioli, Francesco, Valerio Piattelli, Francesco Cerrone, Davide Gasprino, Tina Kunde, and Enrico Miccadei. 2021. "Feasibility of Objective Seabed Mapping Techniques in a Coastal Tidal Environment (Wadden Sea, Germany)" Geosciences 11, no. 2: 49. https://doi.org/10.3390/geosciences11020049
APA StyleMascioli, F., Piattelli, V., Cerrone, F., Gasprino, D., Kunde, T., & Miccadei, E. (2021). Feasibility of Objective Seabed Mapping Techniques in a Coastal Tidal Environment (Wadden Sea, Germany). Geosciences, 11(2), 49. https://doi.org/10.3390/geosciences11020049