1. Introduction
The use of magnetic forces to overcome the forces exerted on a moving mechanical body is the fundamental idea behind how magnetic bearings work. There are several benefits of magnetic bearings over conventional bearings, such as low losses due to non-contact operation and active control capability which can enhance the stability of the system. Furthermore, as a result of low mechanical wear and losses, system maintenance costs are significantly lower. Commercial applications that employ magnetic bearings include compressors, centrifuges, high-speed turbines, energy-storage flywheels, and high-precision machine tools. Magnetic bearings can be either passive or active. Passive Magnetic Bearings use repulsive forces from the interaction of similar poles of two permanent magnets to keep the rotor away from the bearing surfaces. Active Magnetic Bearings (AMB) use actively controlled electromagnetic forces to control the motion of a rotor or another ferromagnetic body in the air. An AMB system normally consists of sensors, electromagnets, power amplifiers, power supplies, and controllers [
1].
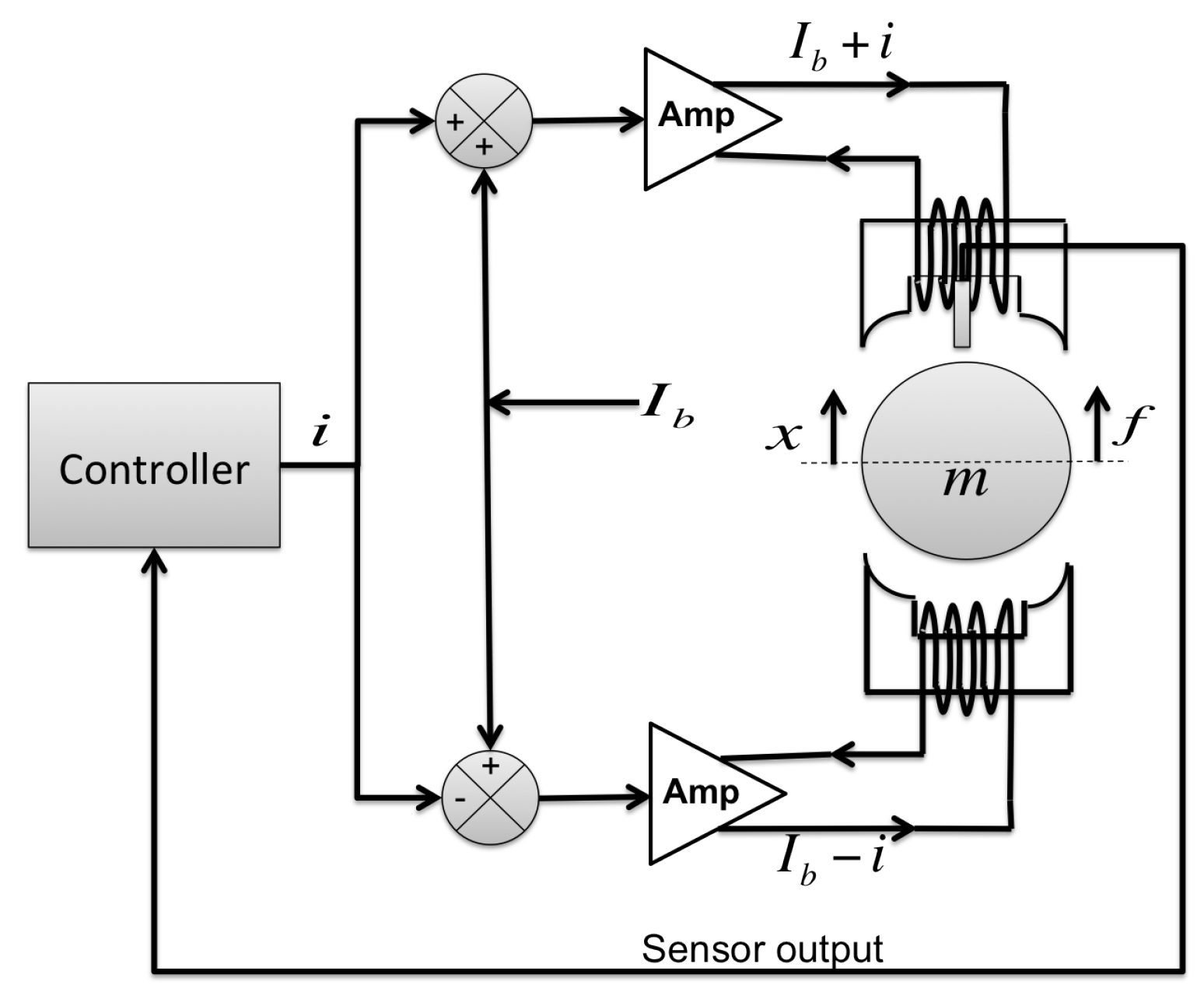
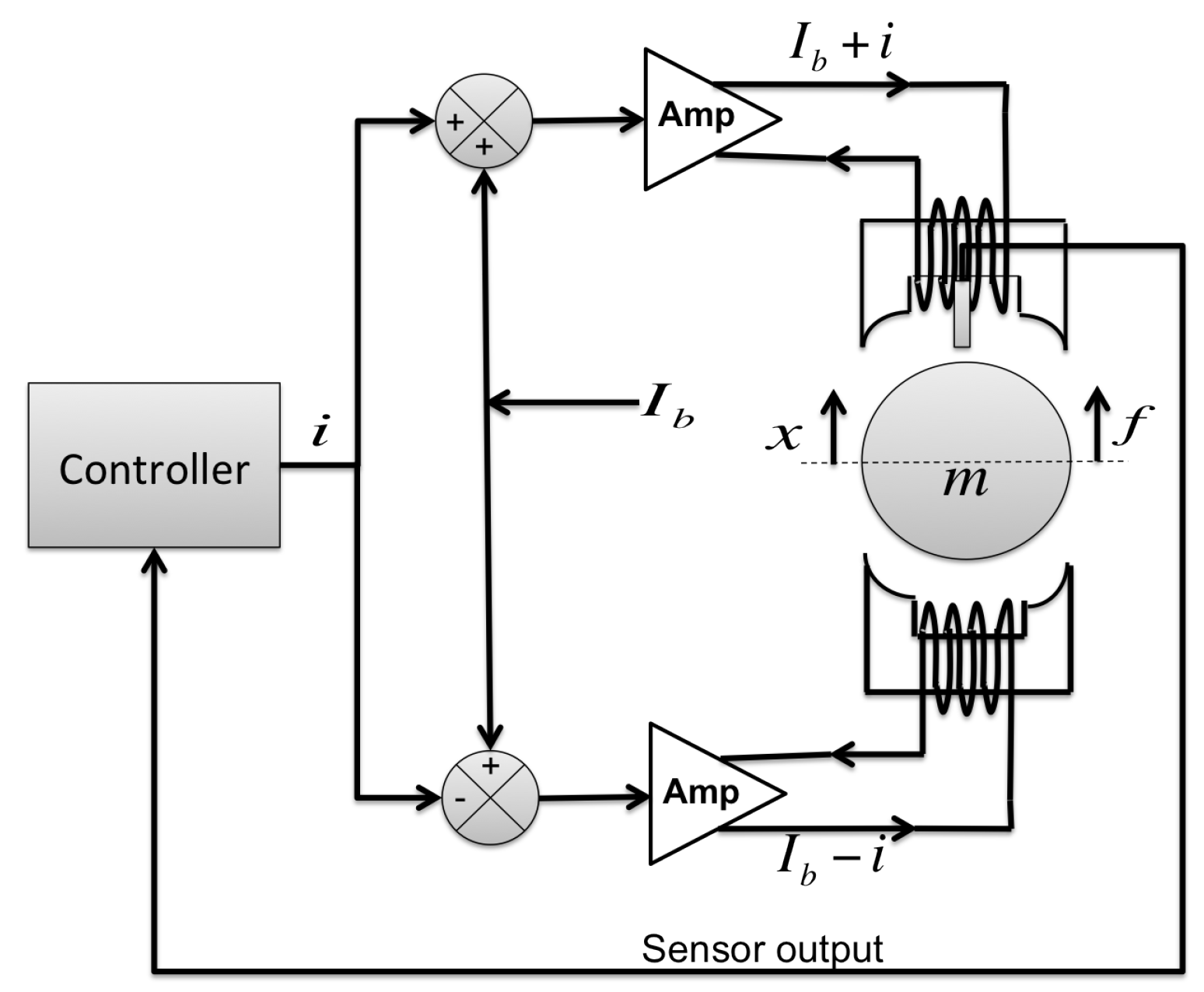
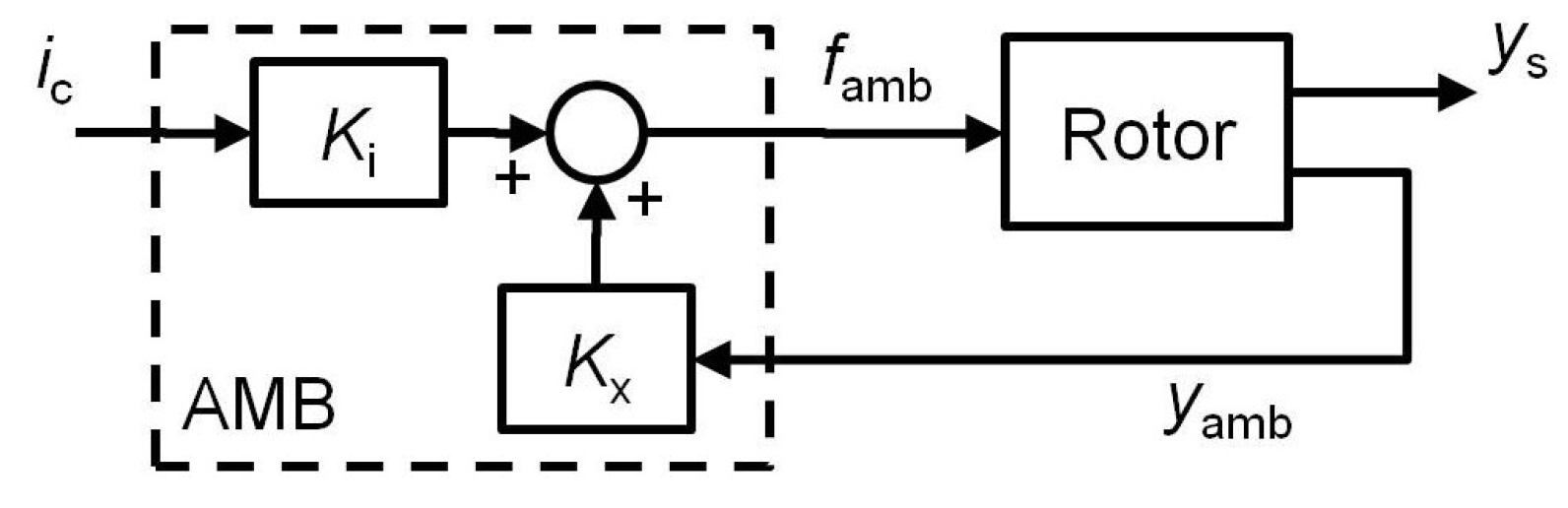
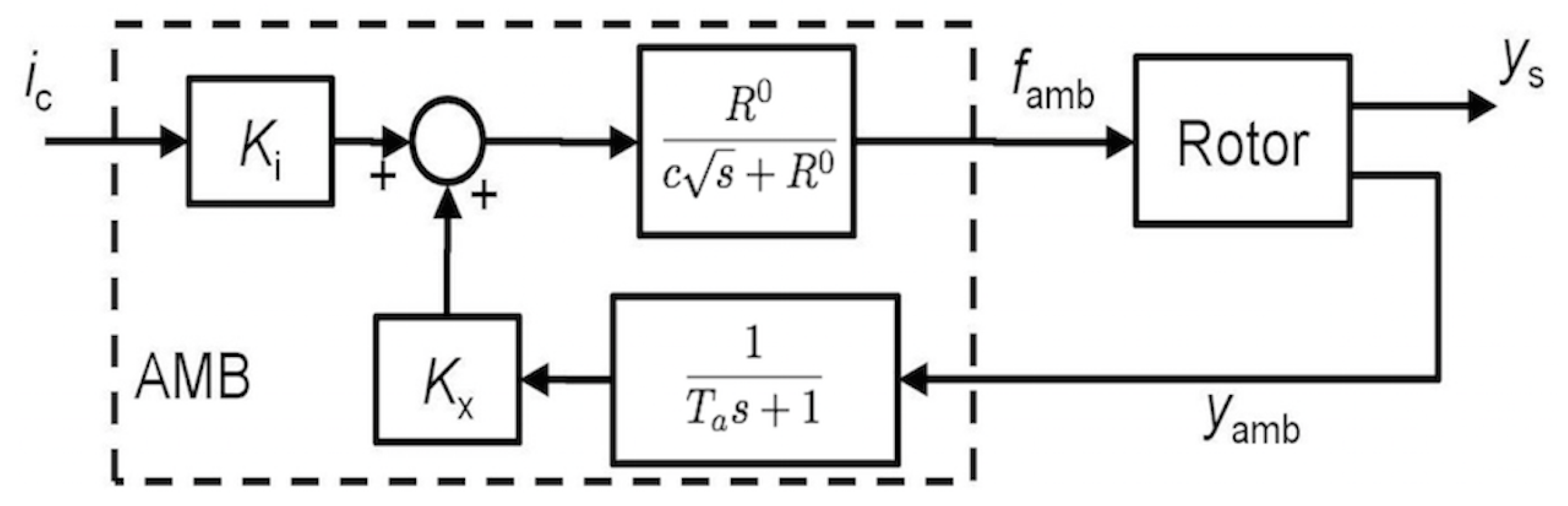
Figure 1 shows the basic principle of an AMB system in one degree of freedom.
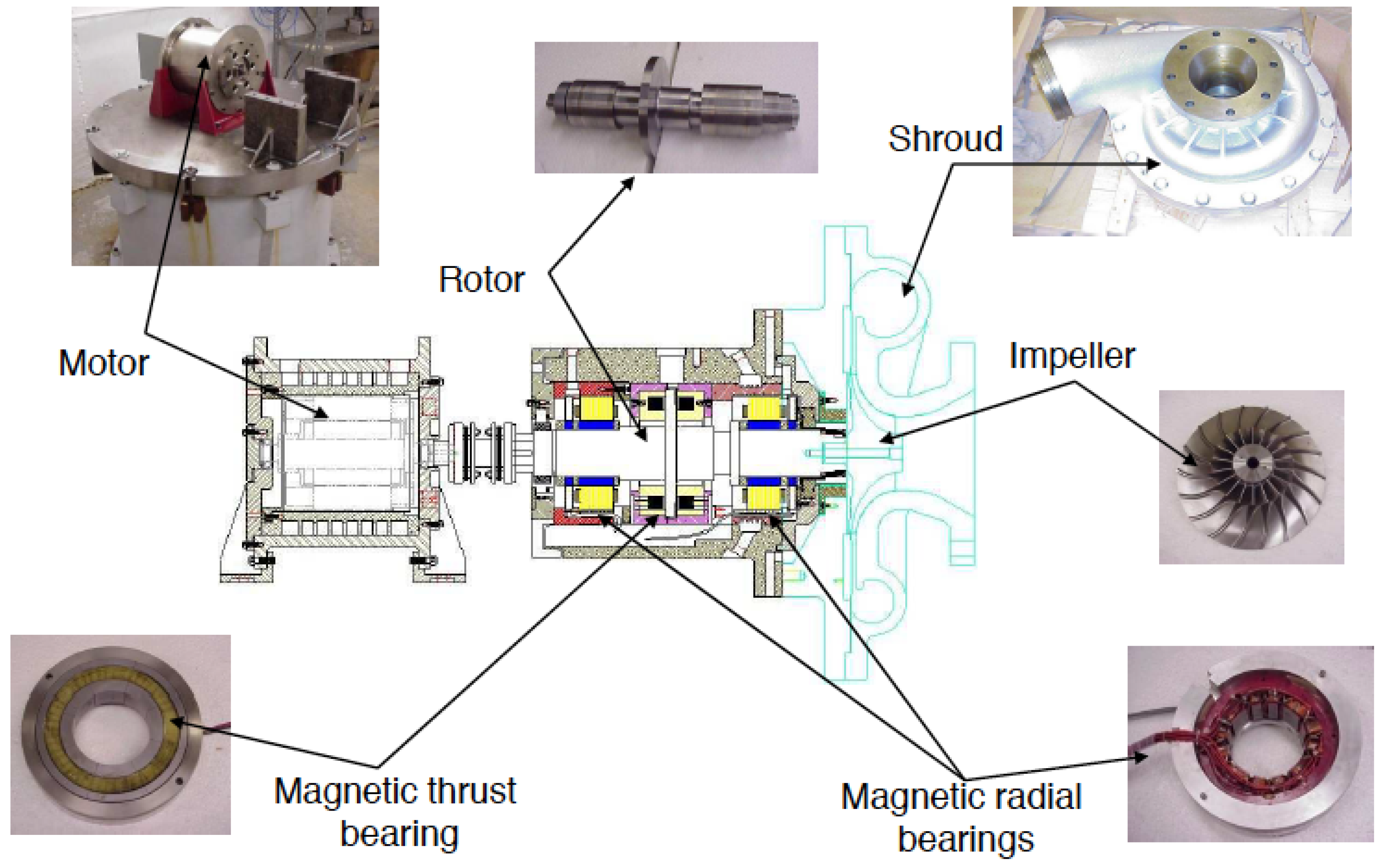
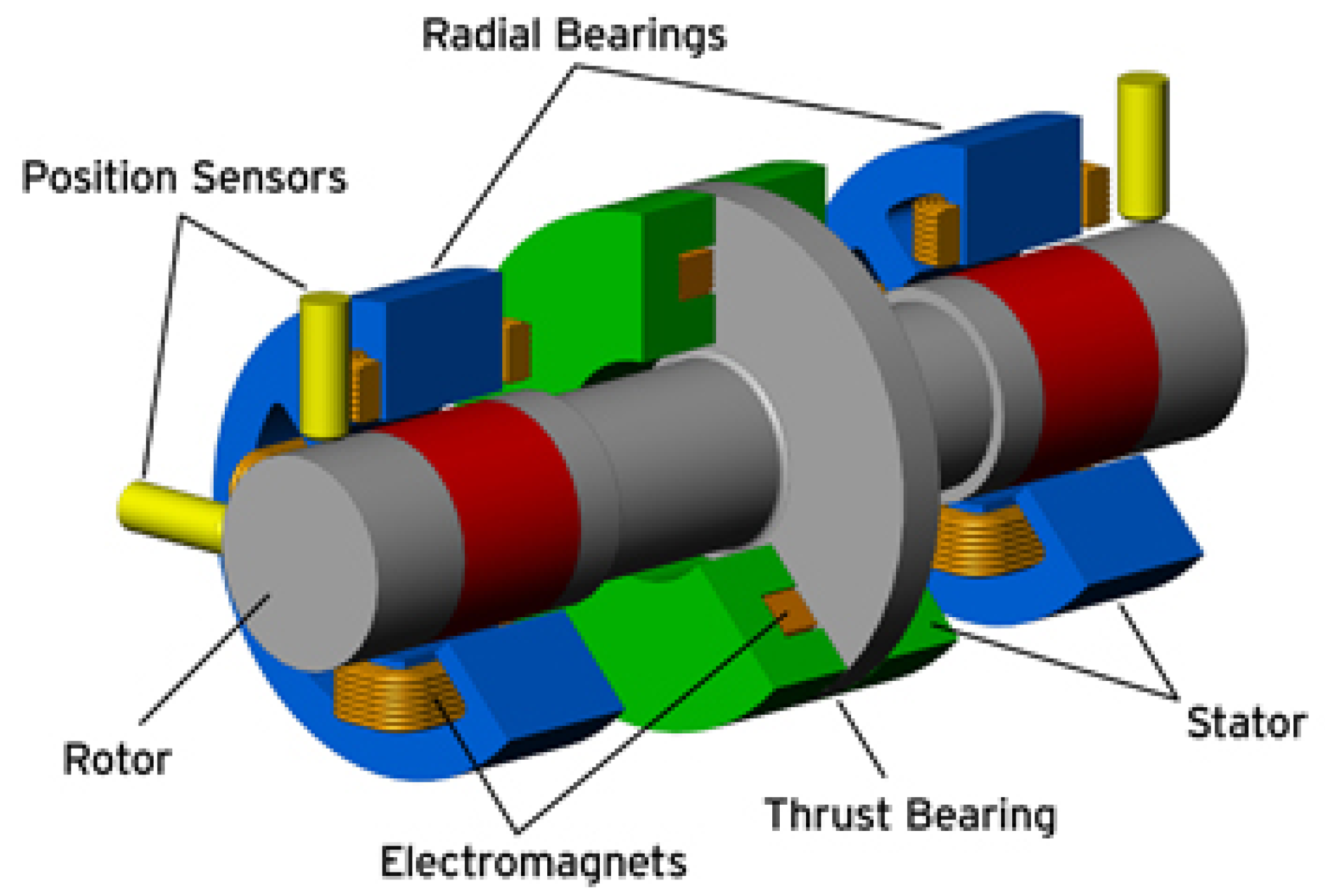
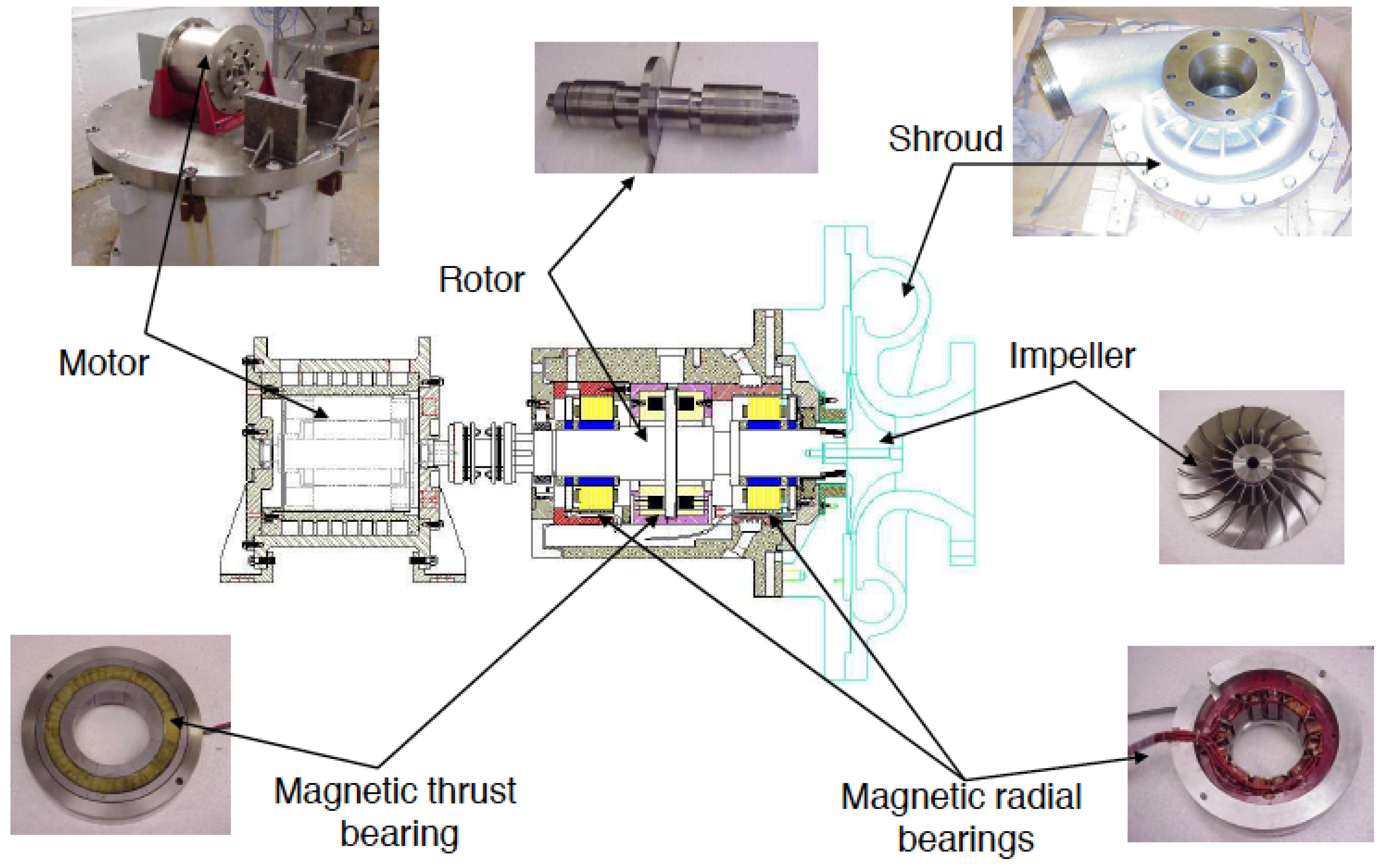
The position sensor detects how far away the rotor is from the magnet. This information is sent to the controller, which outputs proper voltages to the power amplifiers, which in turn apply currents to the electromagnets. The electromagnets then generate magnetic forces to balance the rotor to the desired position (i.e., the center of the clearance space). Magnetic bearings for the radial directions are called Radial Bearings and those in the axial direction are called Thrust Bearings. A complete assembly of AMB components is illustrated in
Figure 2.
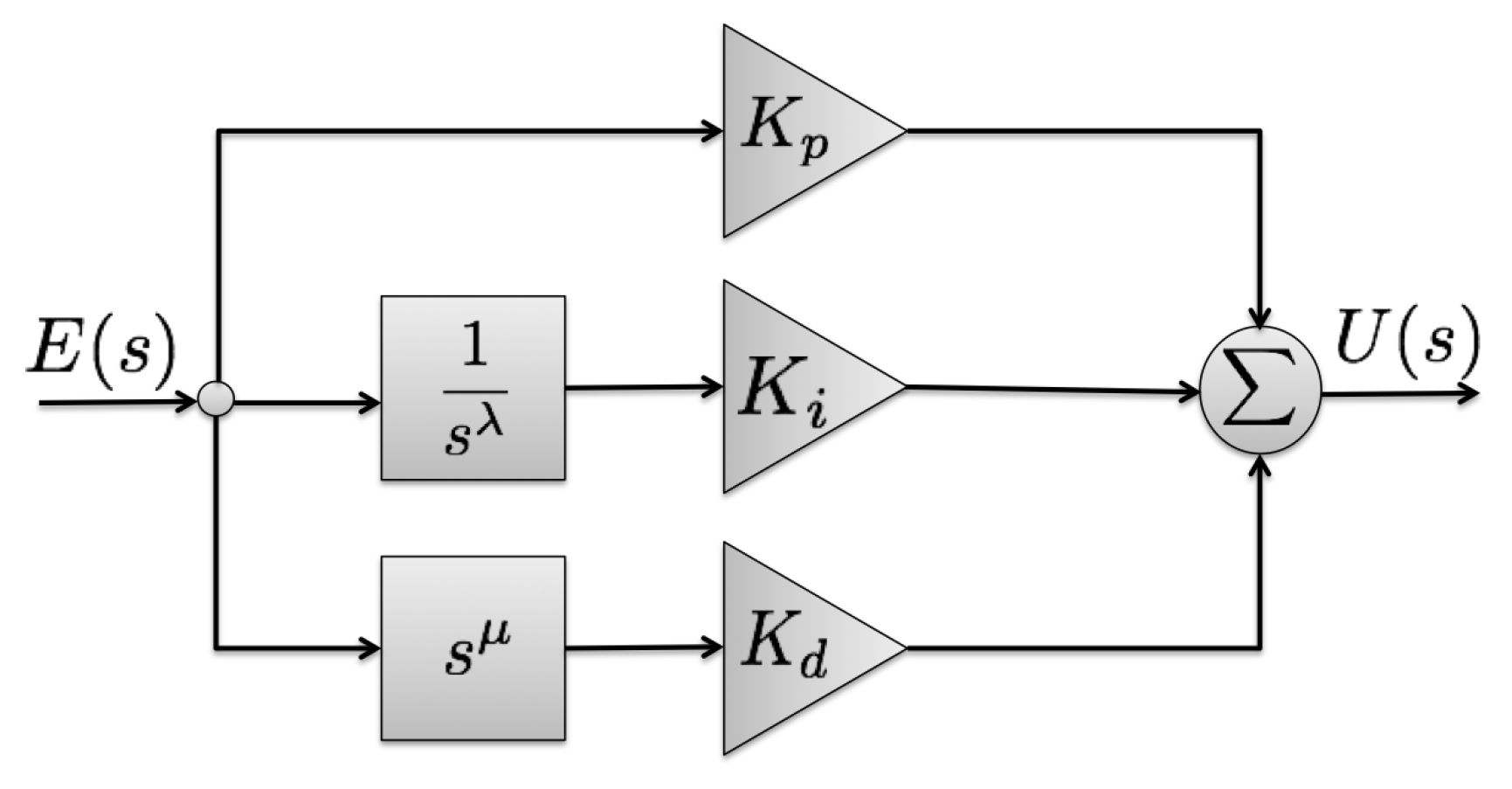
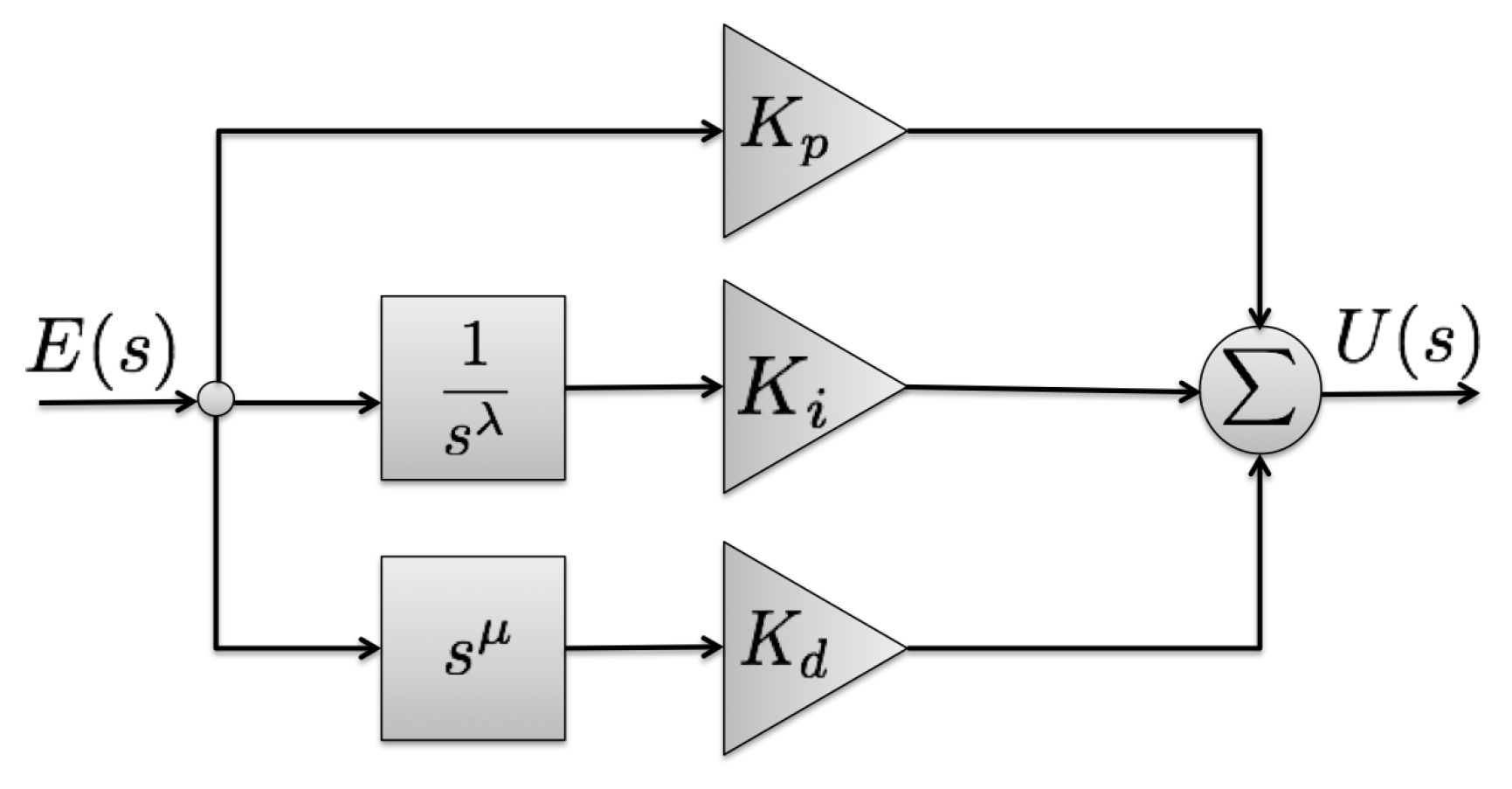
An AMB system is inherently open loop unstable. Therefore it is required to have a controller in the feedback loop to stabilize the system during the operation. Normally, the controller design for an AMB system starts with a Proportional-Integral-Derivative (PID) controller because of its simple structure. Recall here for easy reference that the transfer function of a PID controller is given as
The controller parameters can be tuned intuitively, where the proportional gain
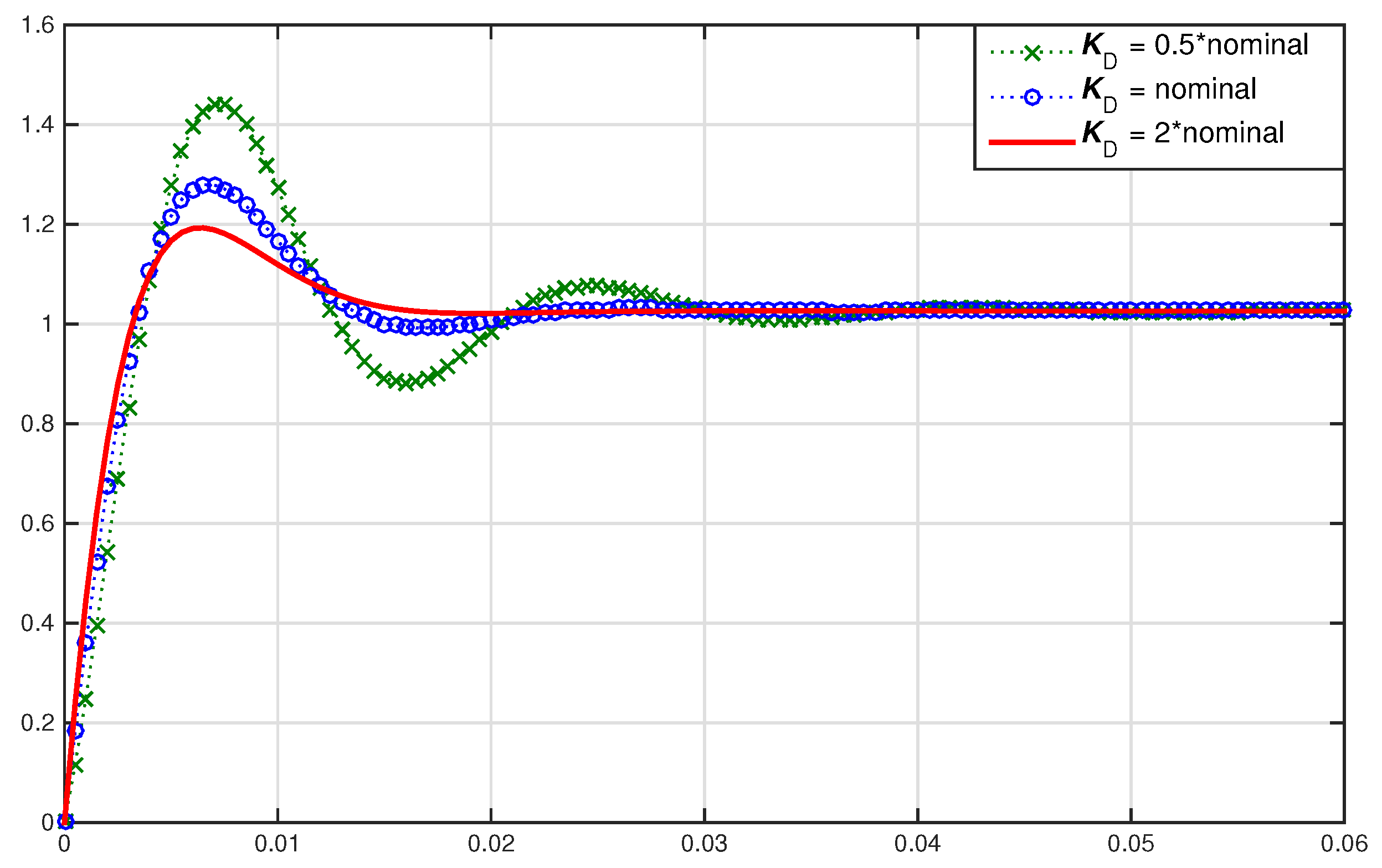
has a similar effect as adding stiffness, and the derivative gain
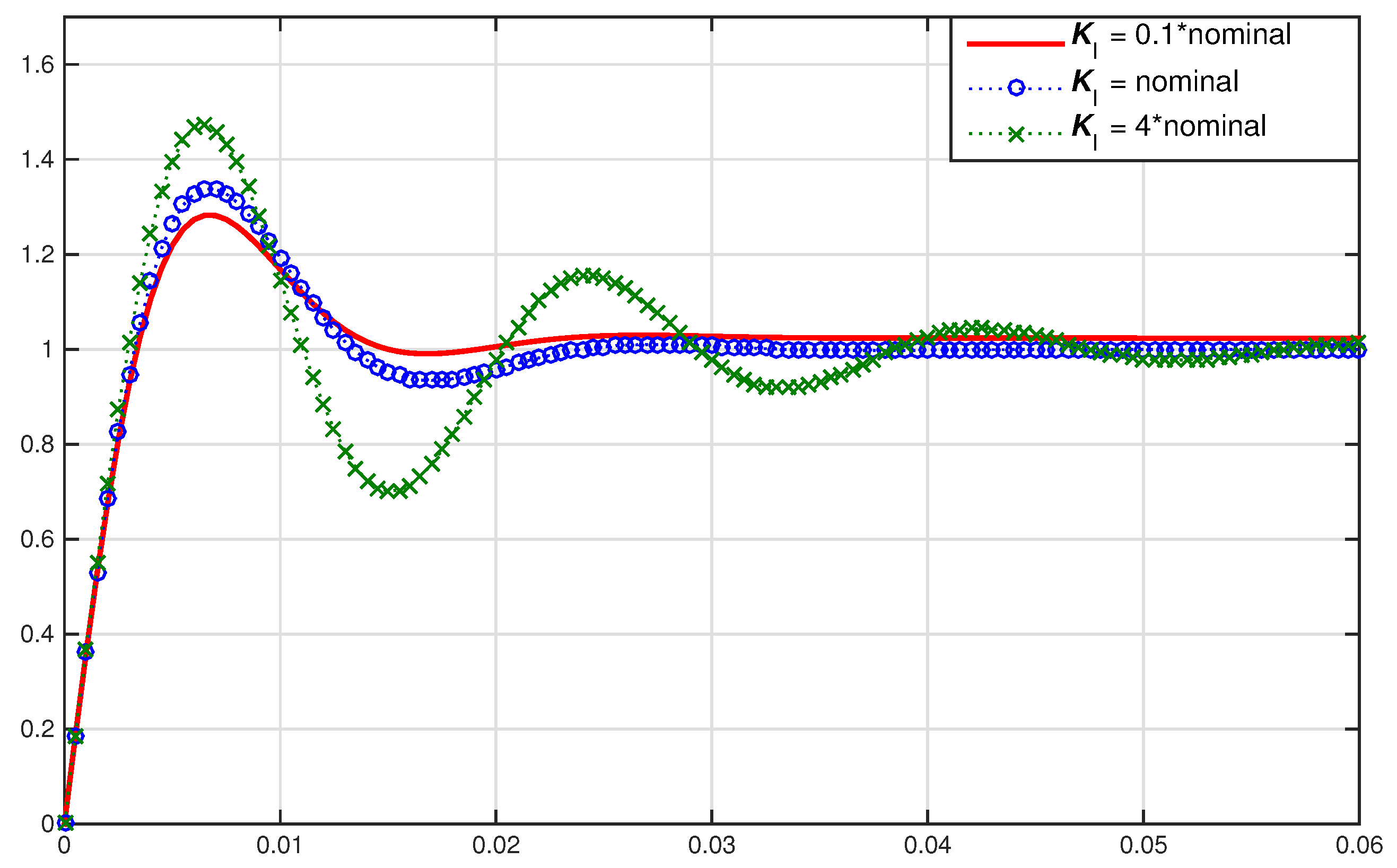
acts as the added damping to the system. In addition, the integral gain
helps in reducing the rotor position offset due to a static disturbance. Note that the form of a PID controller in Equation (1) is not a proper form for implementation. An additional term such as a lowpass filter is required. There are two popular methods in applying a PID controller to an AMB system. The first method is called the decentralized PID where an actuator pair of each control axis works independently from other pairs. The advantage of using the decentralized PID is the simplicity in tuning the controller parameters for one control axis at a time. However, the lateral dynamics of the rotor at different bearing locations are coupled. Thus, there may be some limitation in achieving the desired performance by using a decentralized method. The second method is called the centralized or tilt-and-translate method. This method decouples the two rigid body modes, the tilt mode and the translate mode, and uses two separate PID controllers to stabilize each mode independently. More detail on the tilt-and-translate method can be found in [
2]. Nevertheless, these two types of PID controllers have limitations when dealing with non-collocation of sensors and the flexible modes of the rotor. As such, additional filters are required in order to stabilize the closed-loop system.
Given the above-mentioned shortcomings of the PID controllers, some advanced controllers have been developed to stabilize an AMB system for better performance. These controllers are multiple-input multiple-output (MIMO) and centralized. Examples of advanced controllers used in AMB systems are Linear Quadratic Regulator (LQR),
, and
μ-synthesis controllers. The objective of the LQR controller design is to find the optimal state feedback gain
K that minimizes the quadratic objective function
J which represents a tradeoff between the energy of the state
x and that of the control input
u,
For implementation, the LQR controller is extended to a Linear Quadratic Gaussian (LQG), where the Kalman filter is adopted as a state observer. An example of LQG control design for AMB systems can be found in [
3]. The complication of this type of controllers is that it requires skill and experience to select the appropriate weighting matrices
Q and
R to obtain a controller that provides good performance. Therefore, because of practical applicability as mentioned in [
2], LQR and LQG controllers are not widely used in AMB systems.
One of the most popular modern control methods for AMB systems is
control. It provides a powerful frequency domain framework for capturing design requirements such as control energy, reference tracking, bandwidth, disturbance rejection, and robust stability. Weighting functions are specified as an upper or lower bound (unstructured) of the uncertainties for each requirement, and the objective of
control is to find the controller that minimizes the
norm of the closed-loop system that takes into account all the weighting functions. An example of
control design for AMB systems can be found in [
4].
Another popular modern control method for AMB systems is
μ-synthesis. The
μ-synthesis design takes an approach that is very similar to
control design but includes structured (parametric) model uncertainties instead of unstructured uncertainties. Parametric uncertainties in AMB systems include the rotor speed, the rotor mode damping, the sensor and amplifier models, and the AMB gains [
4]. This allows the controller design to deal with uncertainties at the component level. The objective of
μ-synthesis is to find the controller that maximizes the smallest uncertainty that causes instability. This implies that a
μ controller will improve the performance of the closed-loop system even more than an
controller, but at the cost of a more complex uncertainty characterization. An example of the
μ controller design and the derivation of each component uncertainty for AMB systems can be found in [
5].
These advanced controllers result in better performance and stronger robustness to AMB systems compared to a PID controller, but the design process is more complicated and typically results in a higher order controller. For these reasons, they are still rarely used in industrial applications. Clearly, there is a tradeoff between simplicity when using a PID controller and high performance when using more advanced controllers, which entail more complicated controller structures and design processes. Thus, there is motivation to investigate another control method that achieves this tradeoff.
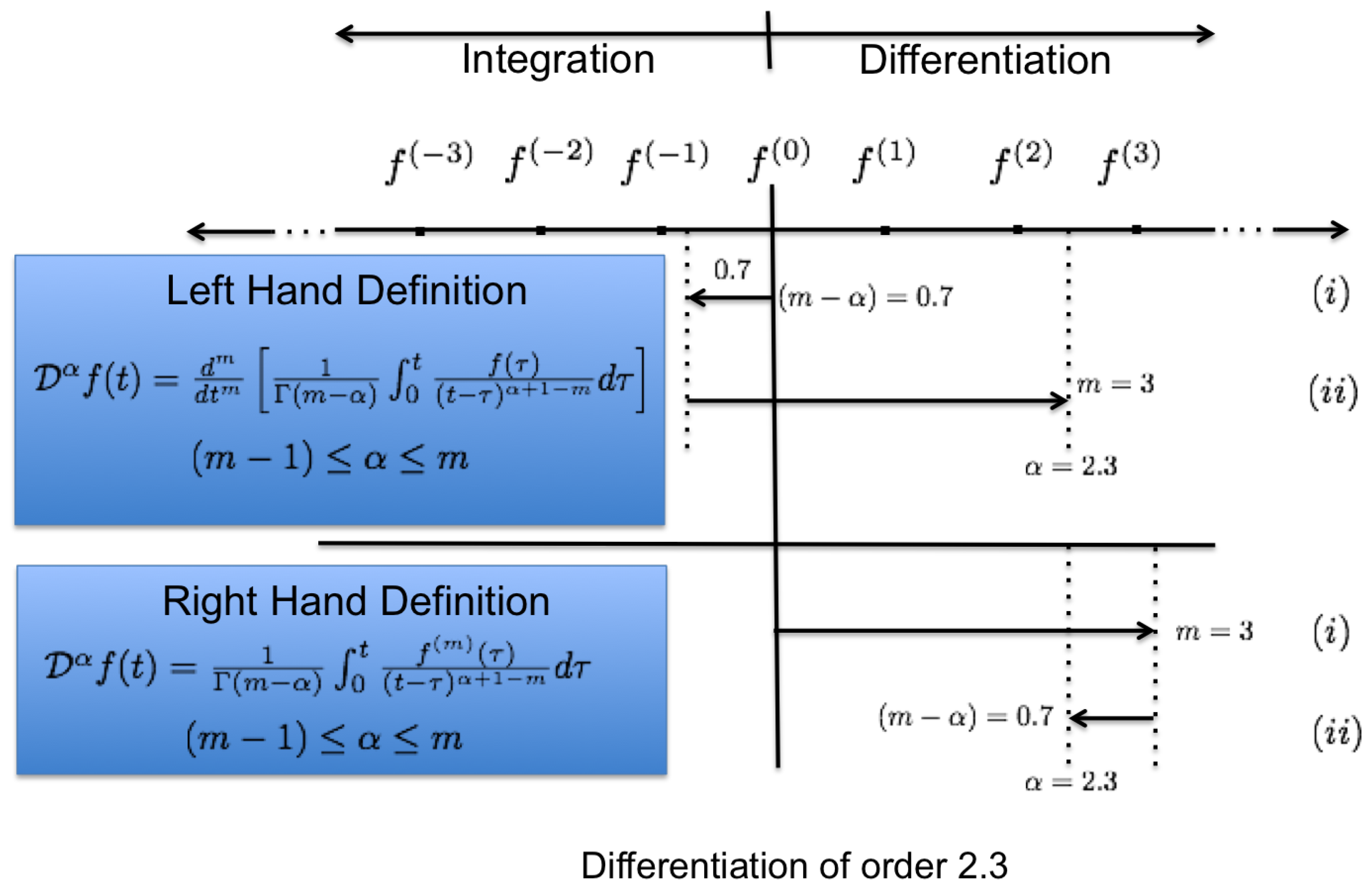
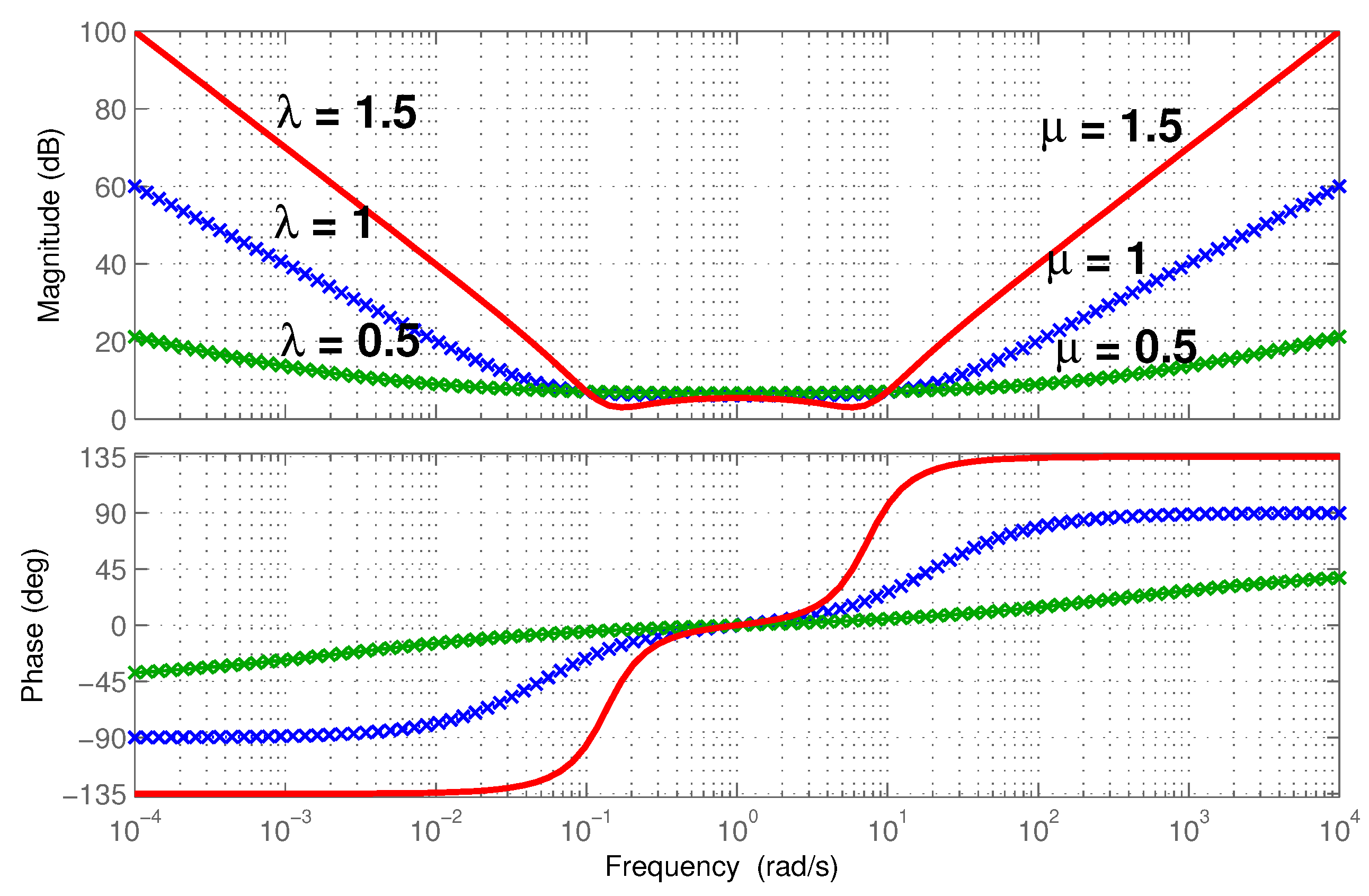
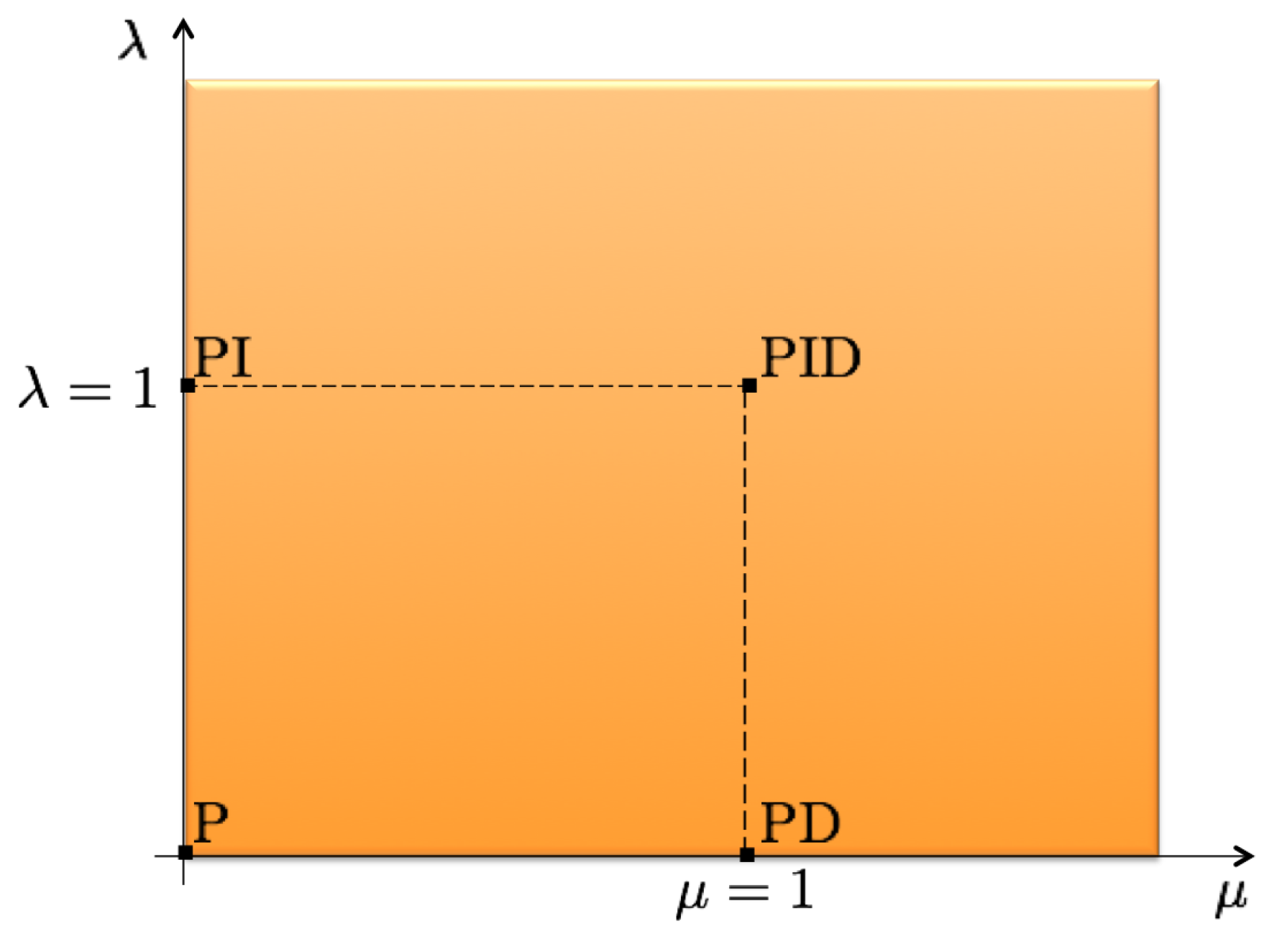
Recently, fractional order calculus theory, which is the generalized version of integer order calculus, has been adopted for many applications due to its accuracy in modeling the dynamics of systems and its simplicity in model structure to represent high order processes. This approach shows a strong potential to satisfy the need of a more powerful controller with a simple structure. This paper studies the design of fractional order PID (FOPID) controllers for AMB systems.
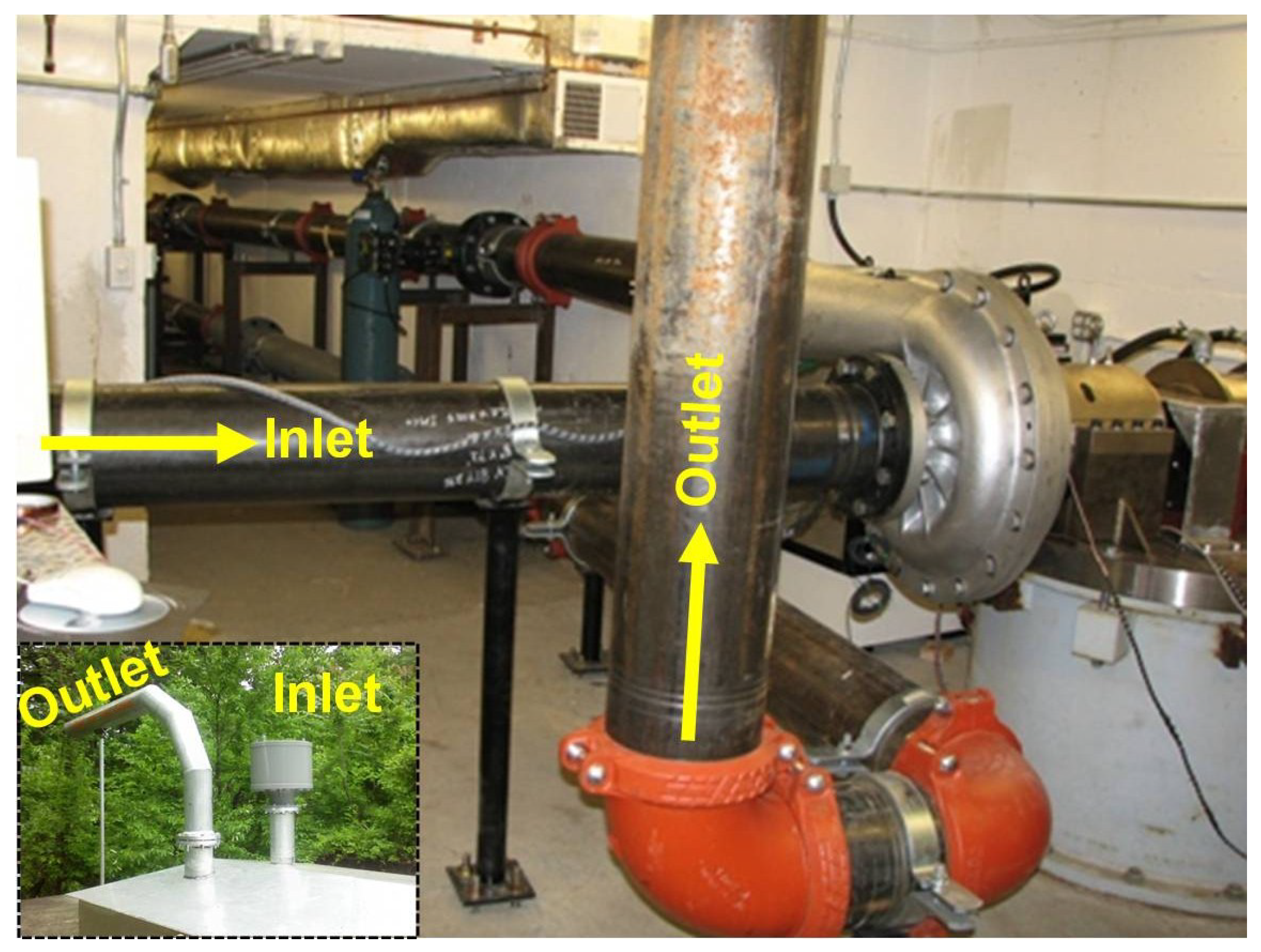
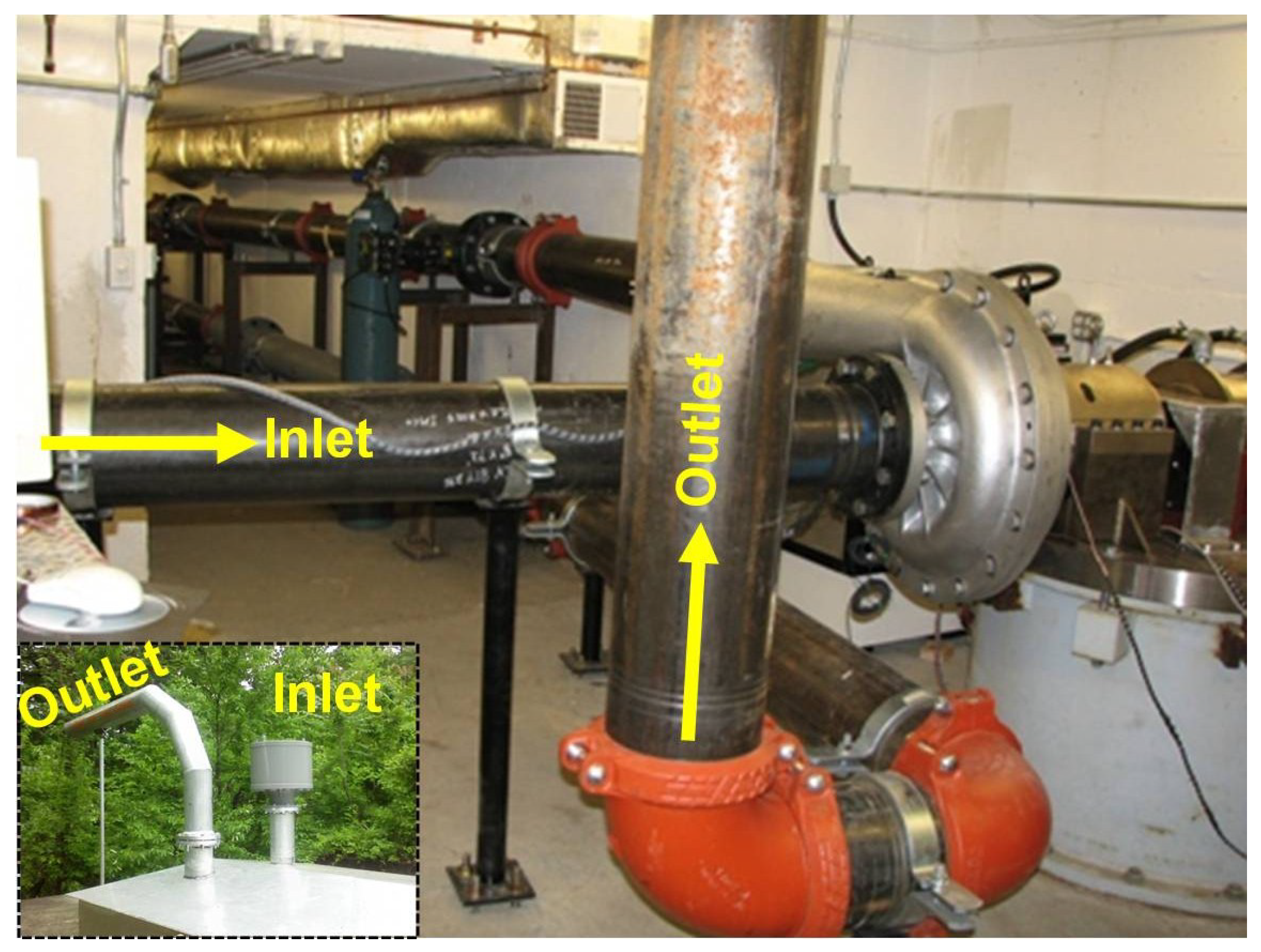
The remainder of the paper is organized as follow. First, the fundamental of the fractional order calculus and the fractional order PID control is explained. Then, an overview of the centrifugal compressor test rig to be used for our experimental study is given. After that the process of designing the fractional order controller for rotor suspension is described. It is then followed by the validation of the proposed method by the simulation and experimental results. Finally, the paper ends with a conclusion of the study.
5. Discussion
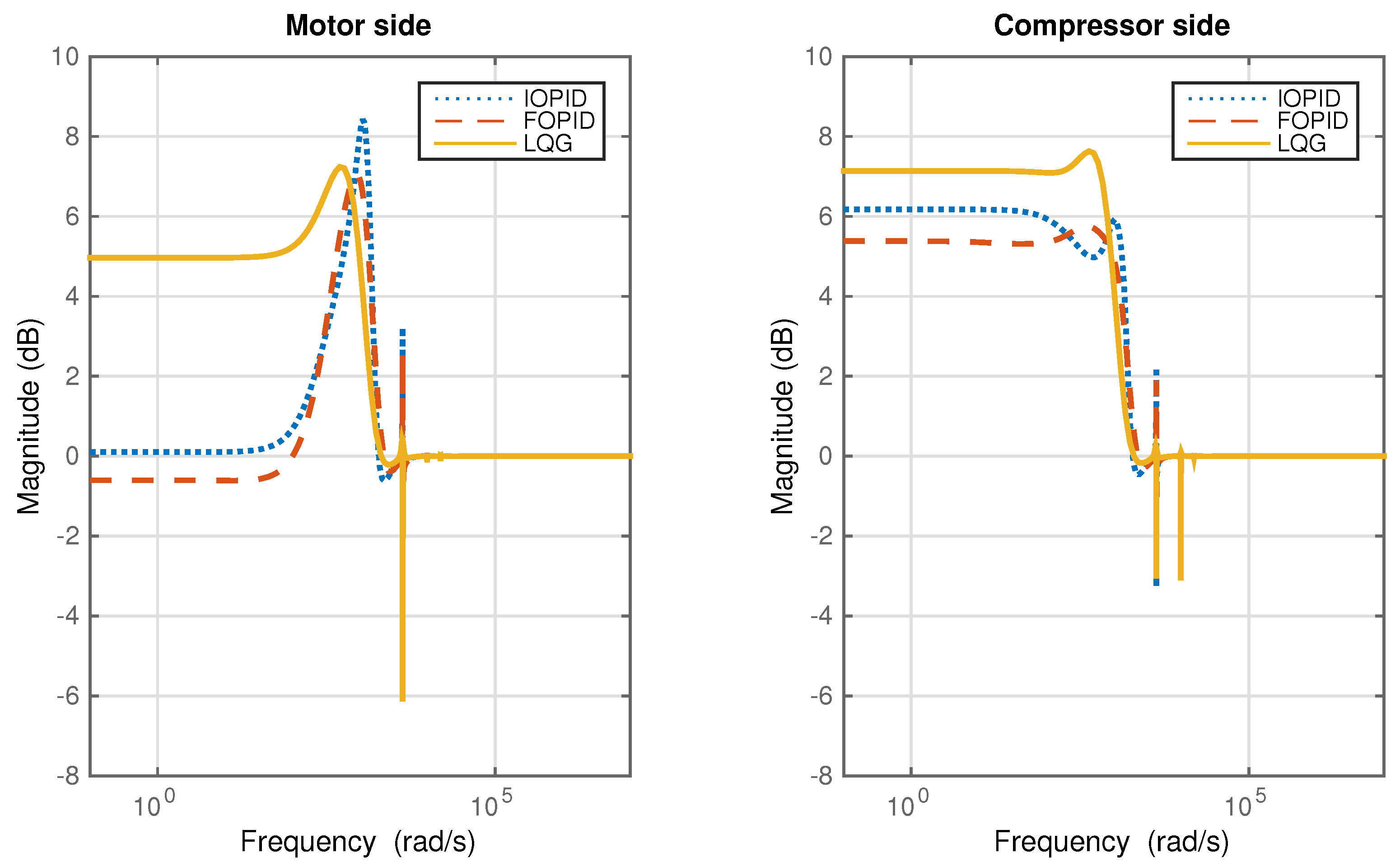
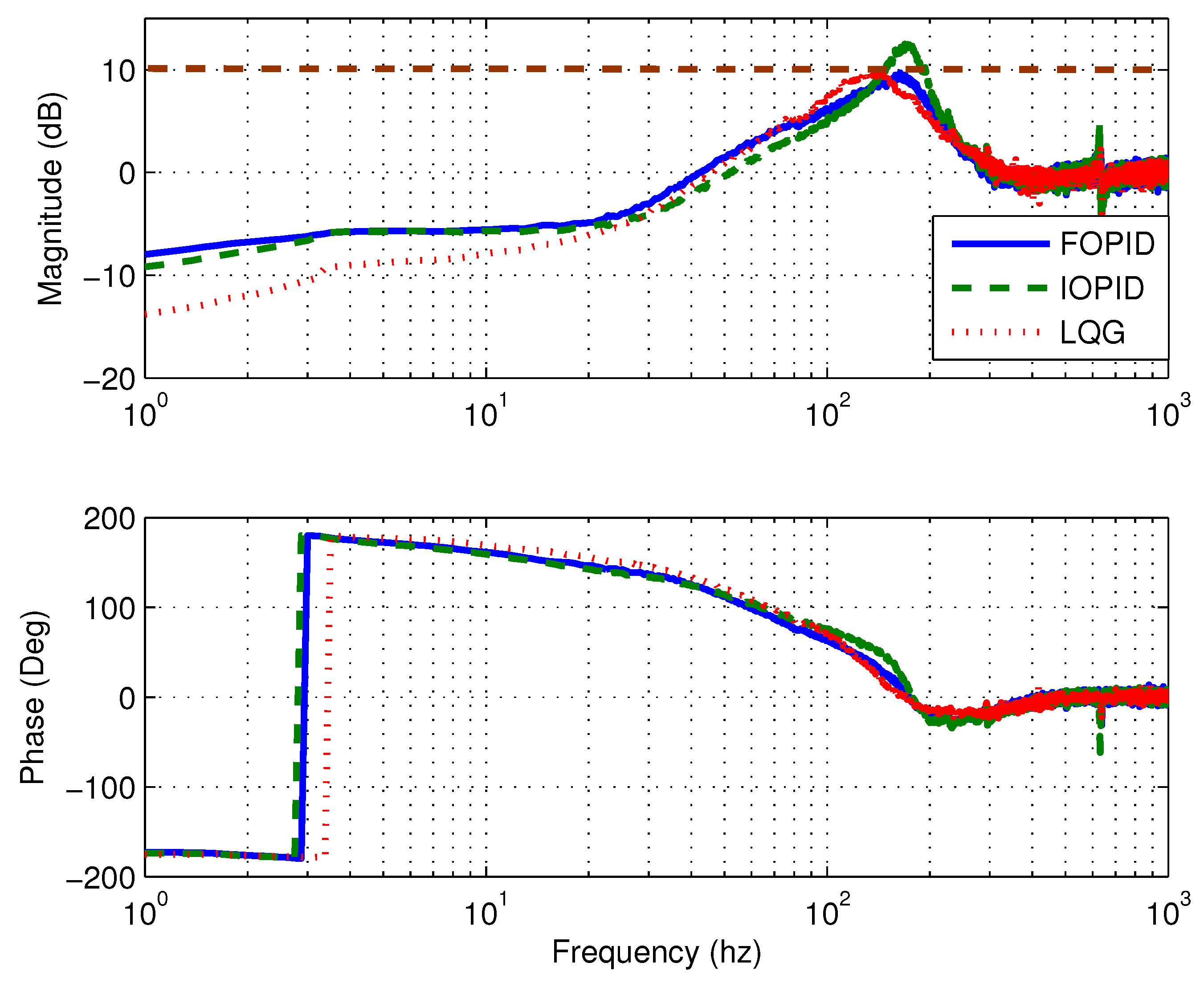
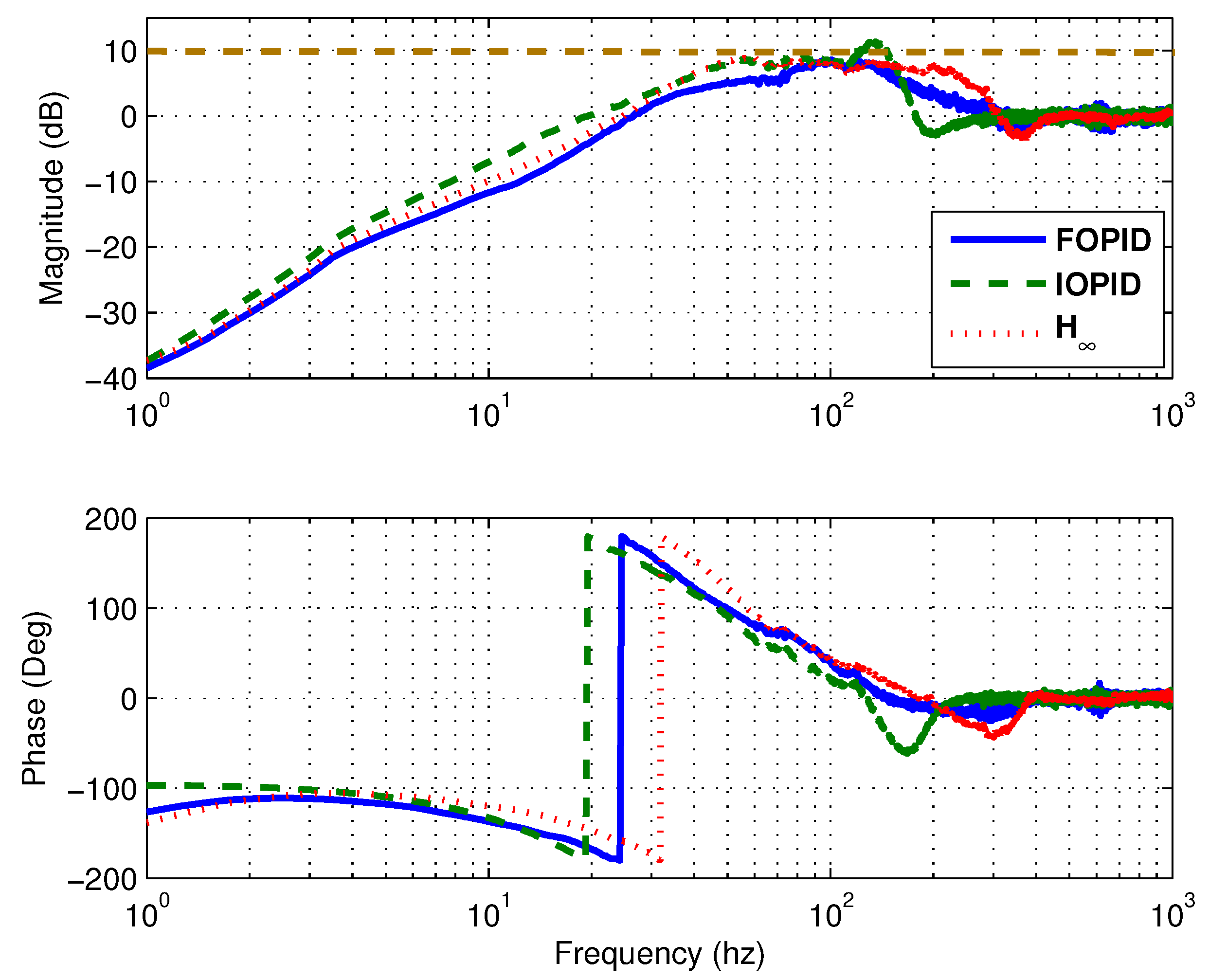
With the specified control objectives that are based on the accepted industrial standards for machinery equipped with magnetic bearings, including ISO 14839 and API 617, the FOPID controllers are designed for rotor suspension in both the radial and the axial directions.
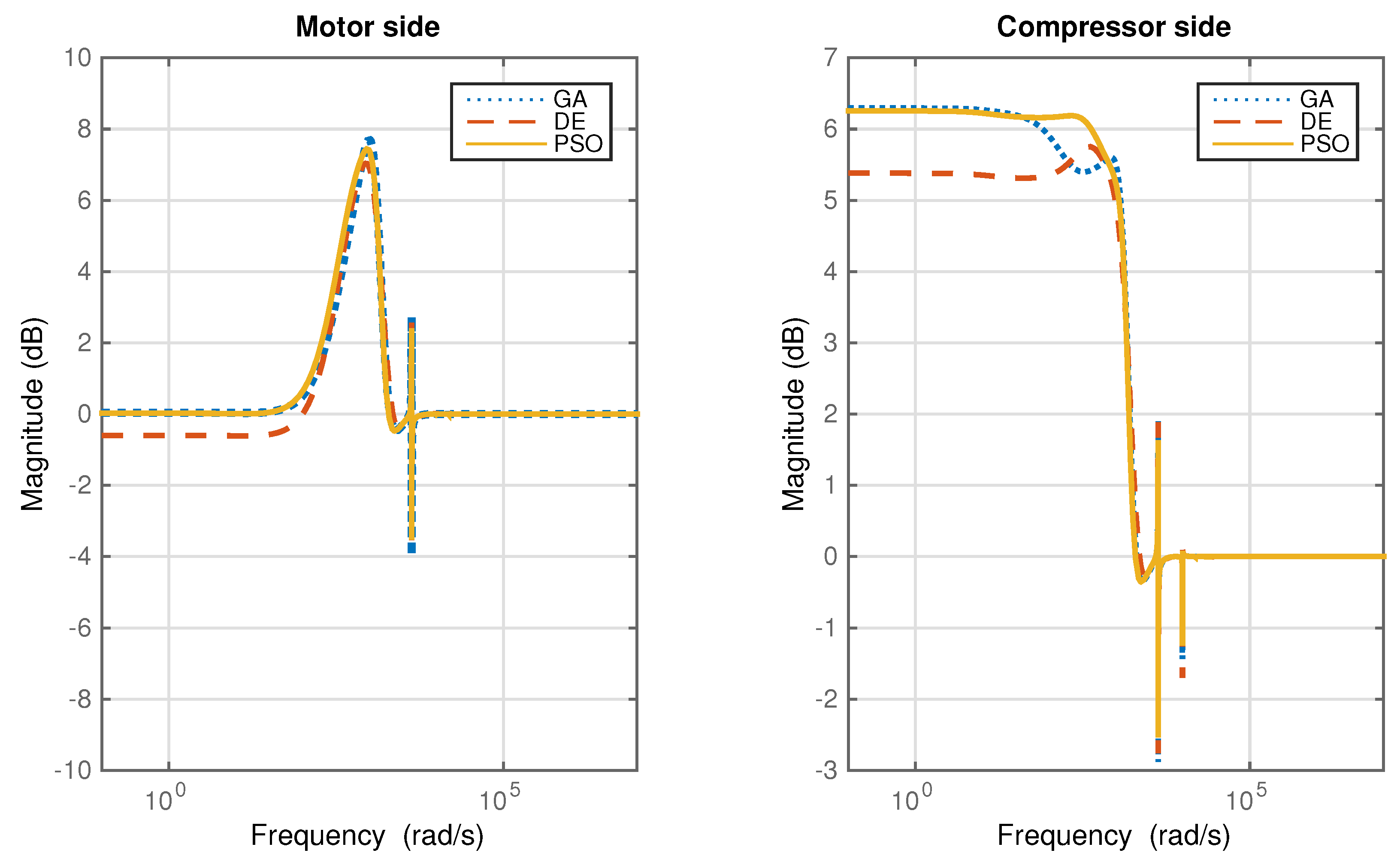
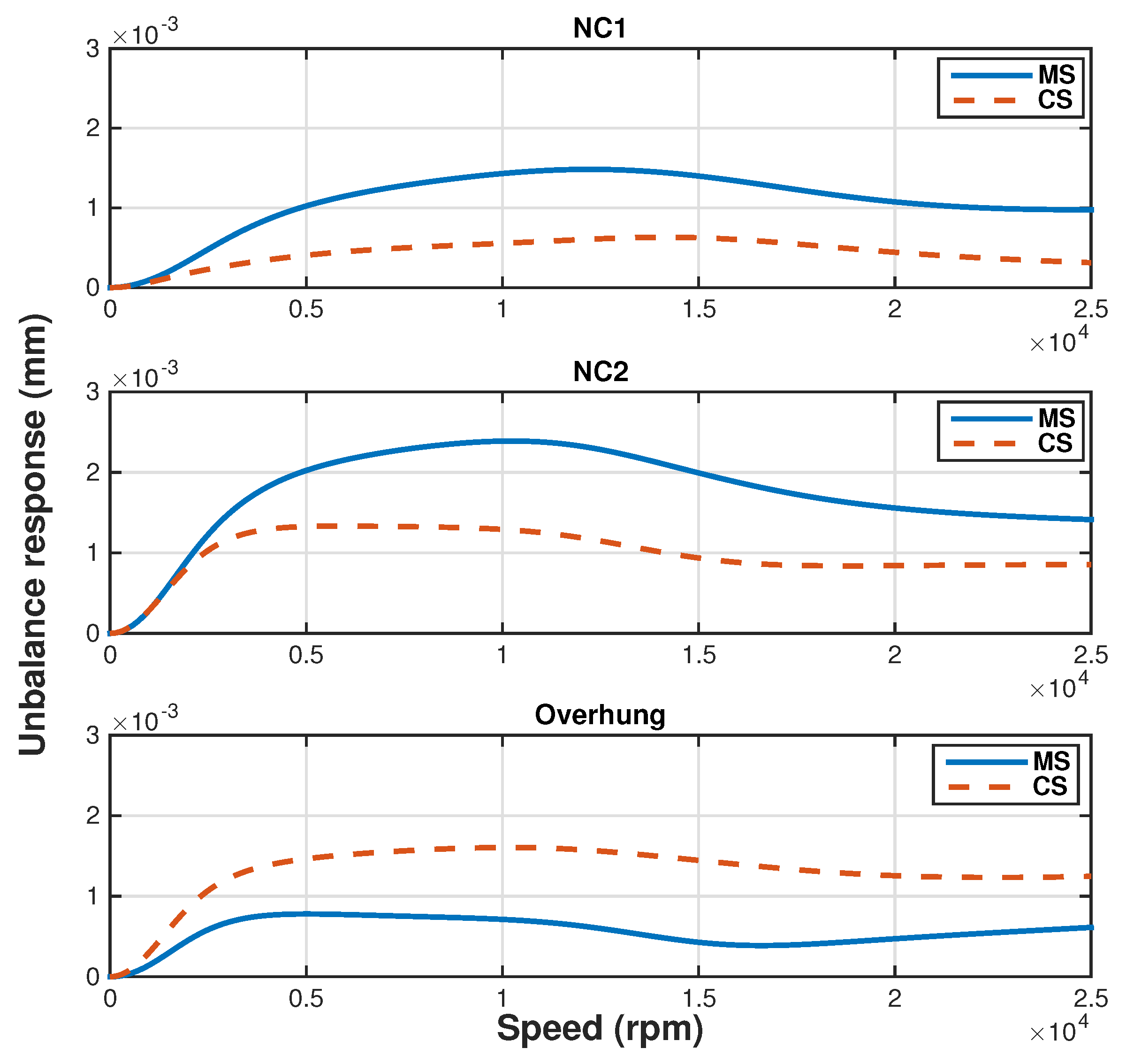
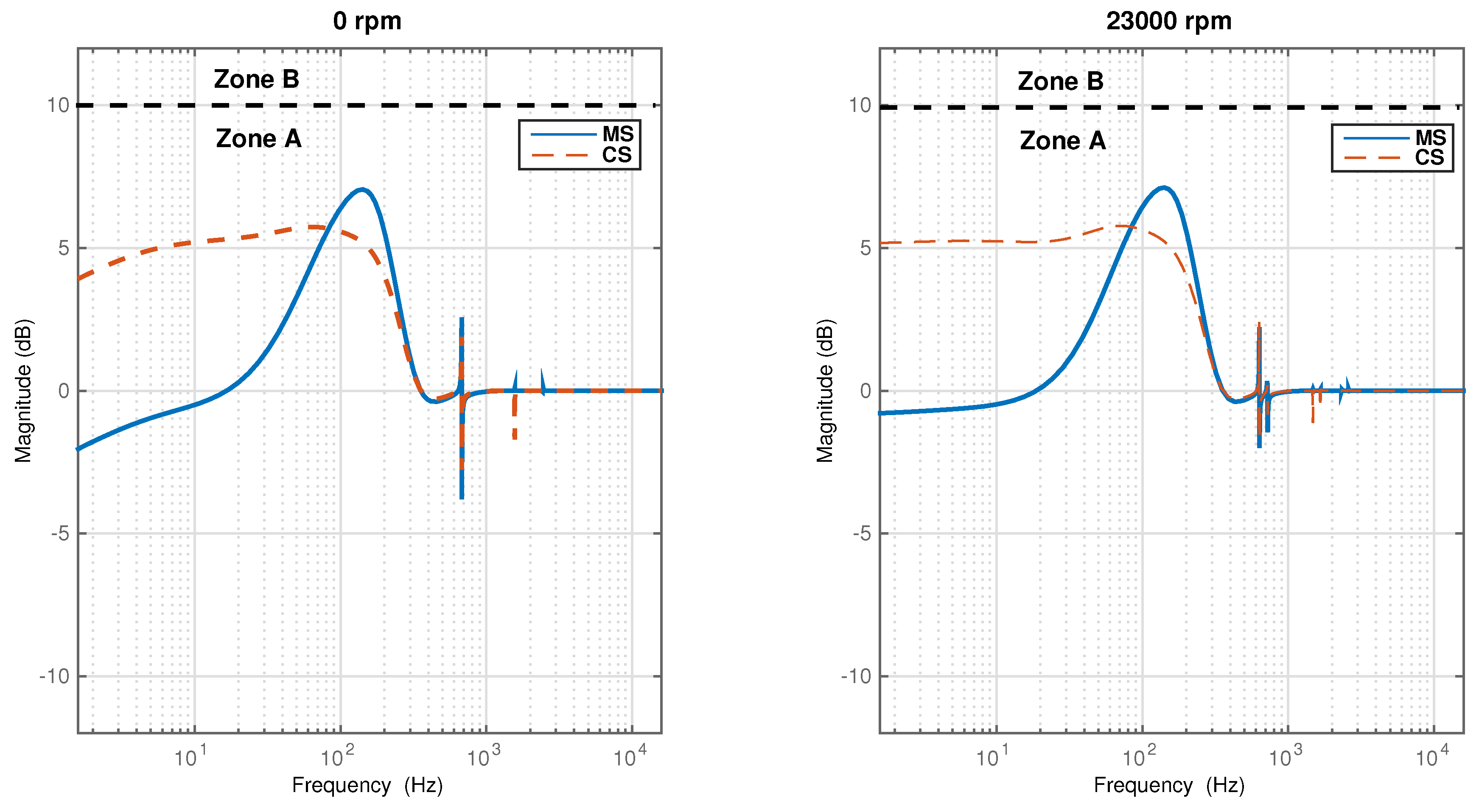
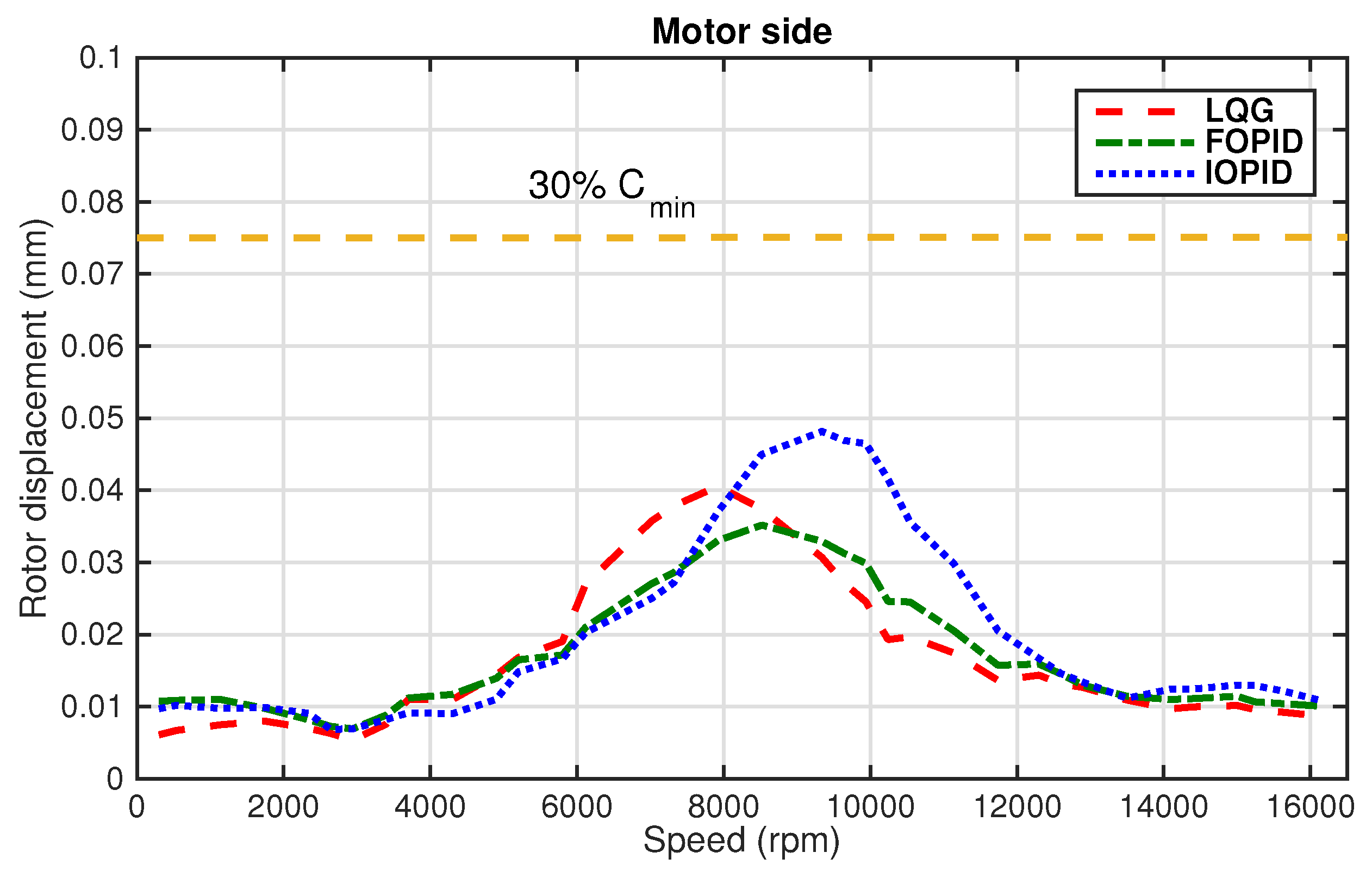
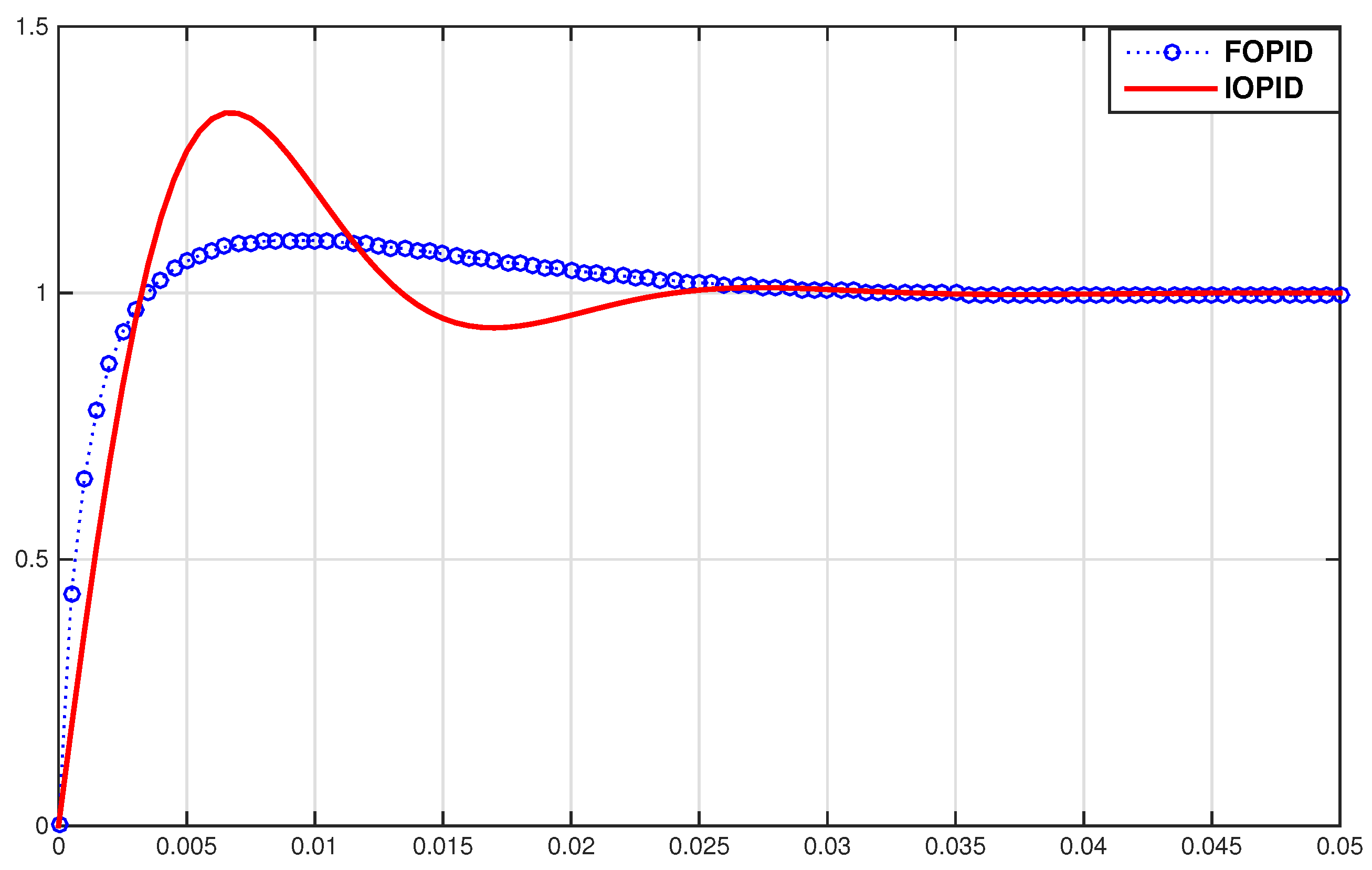
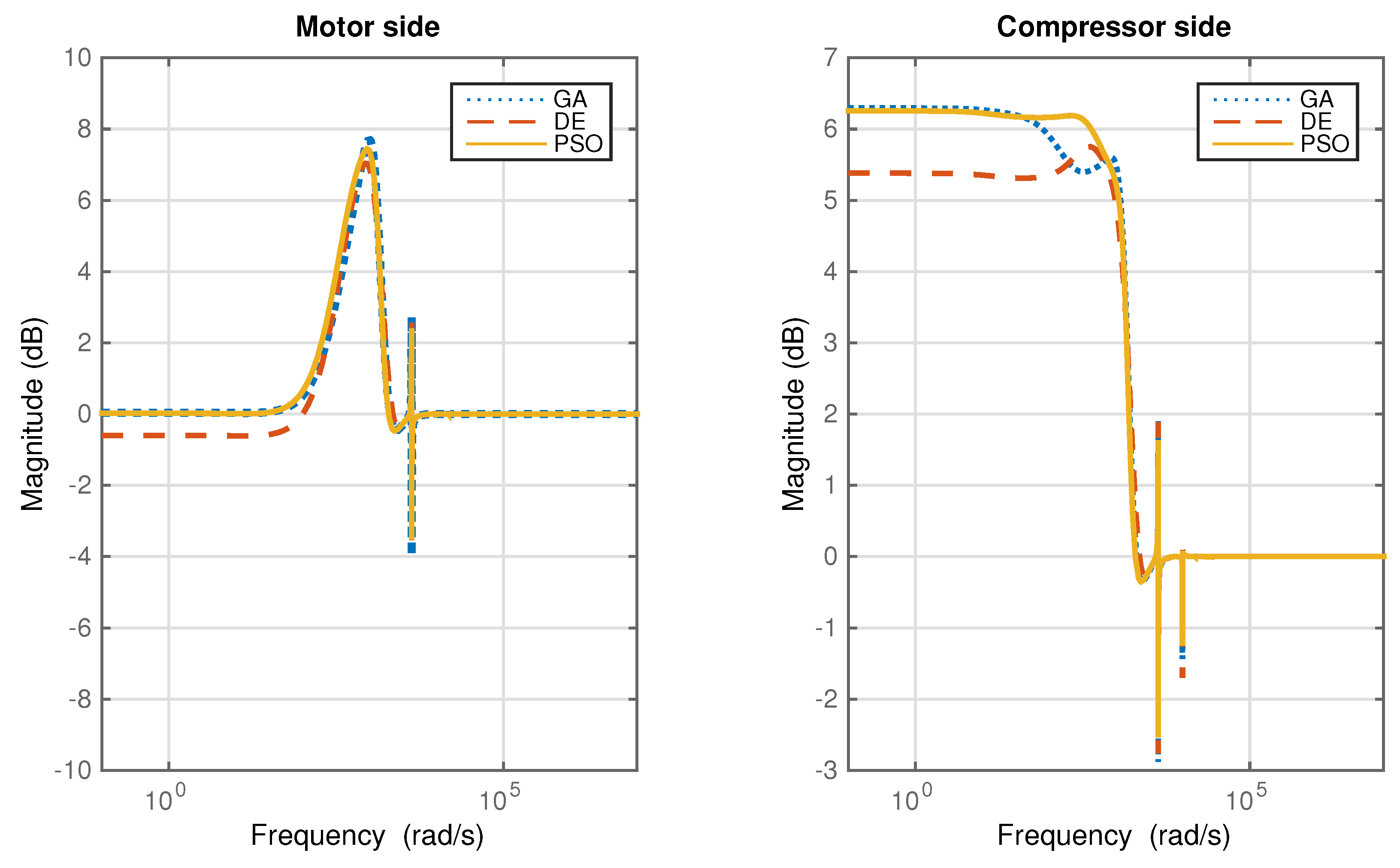
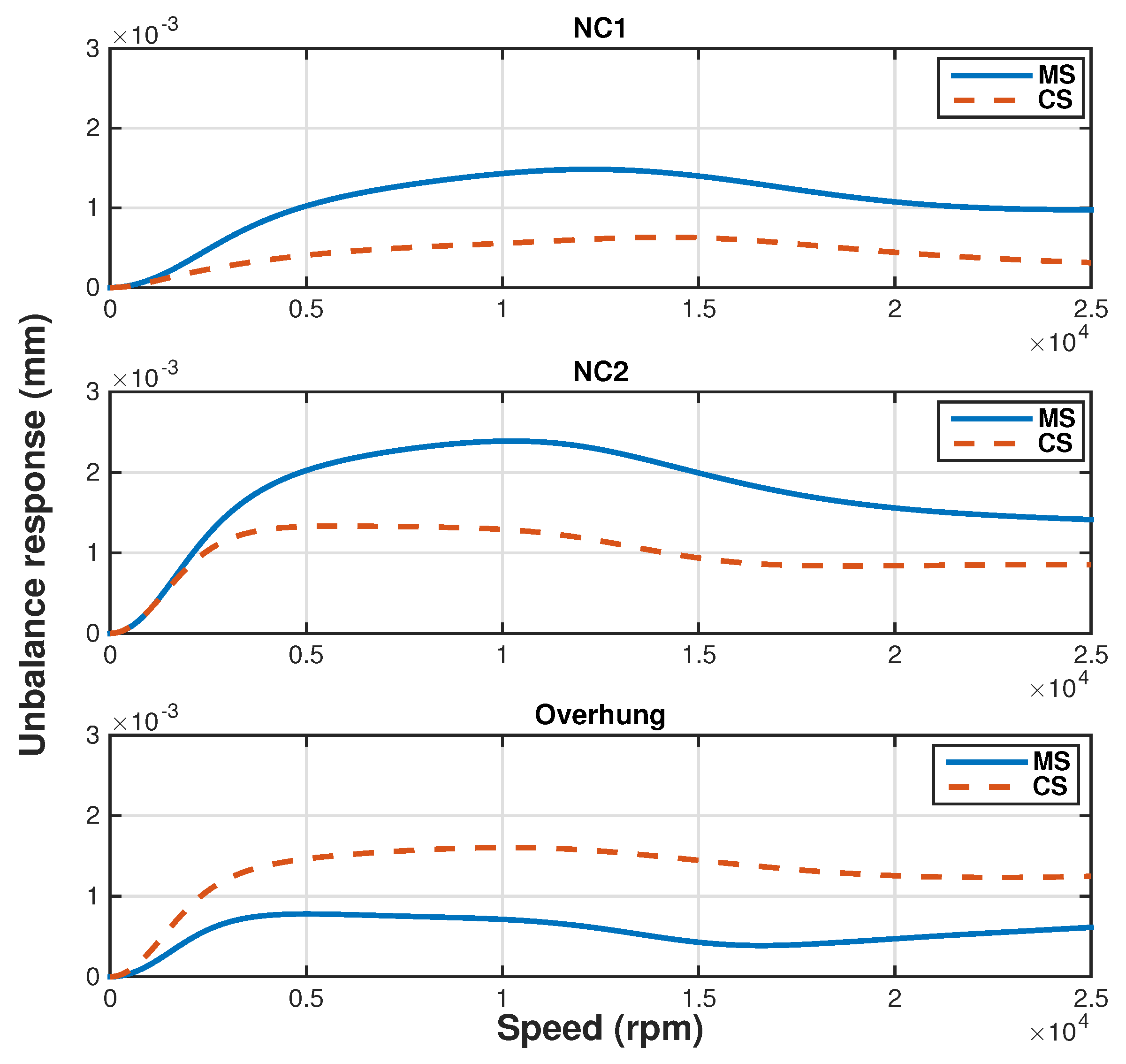
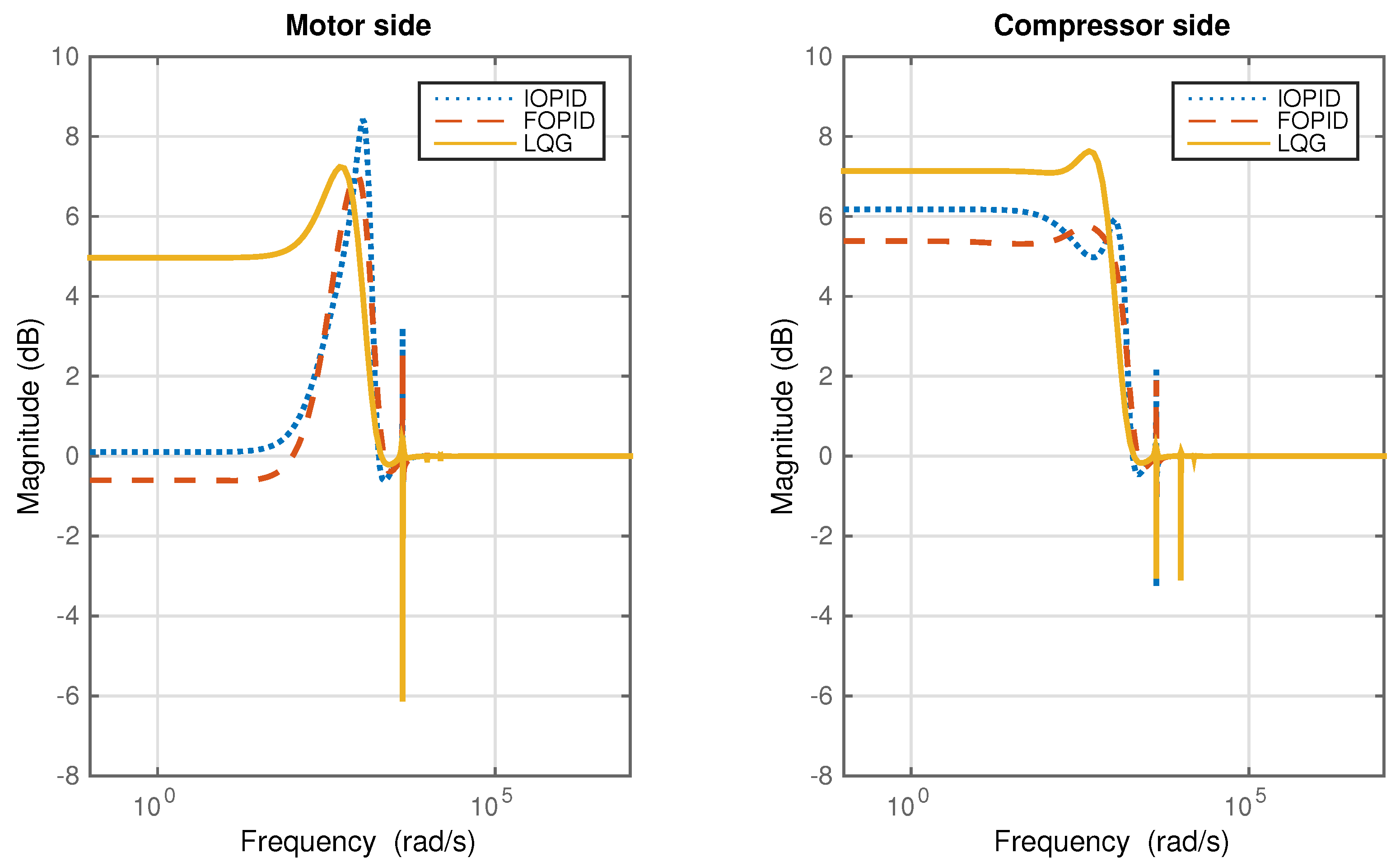
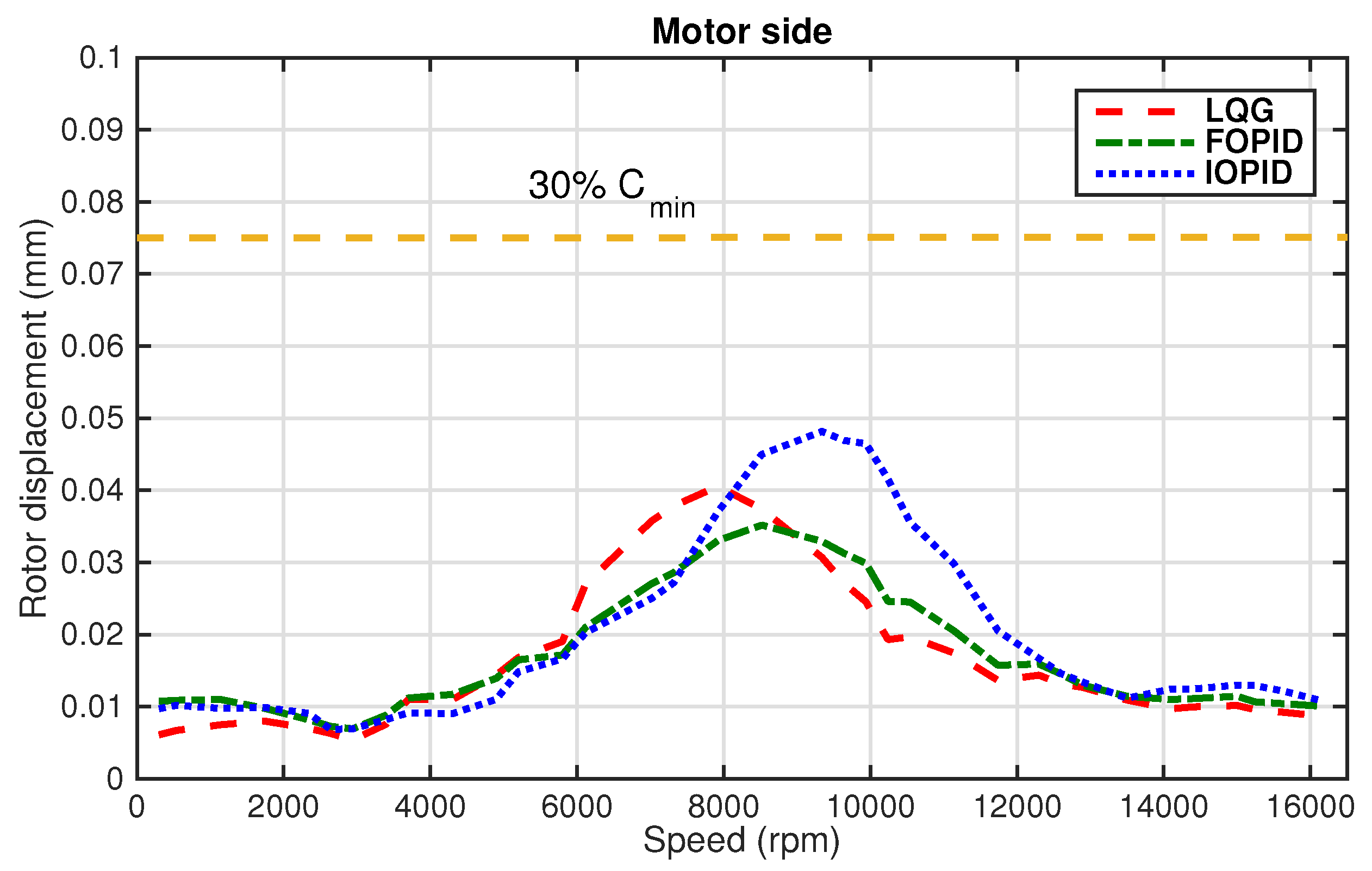
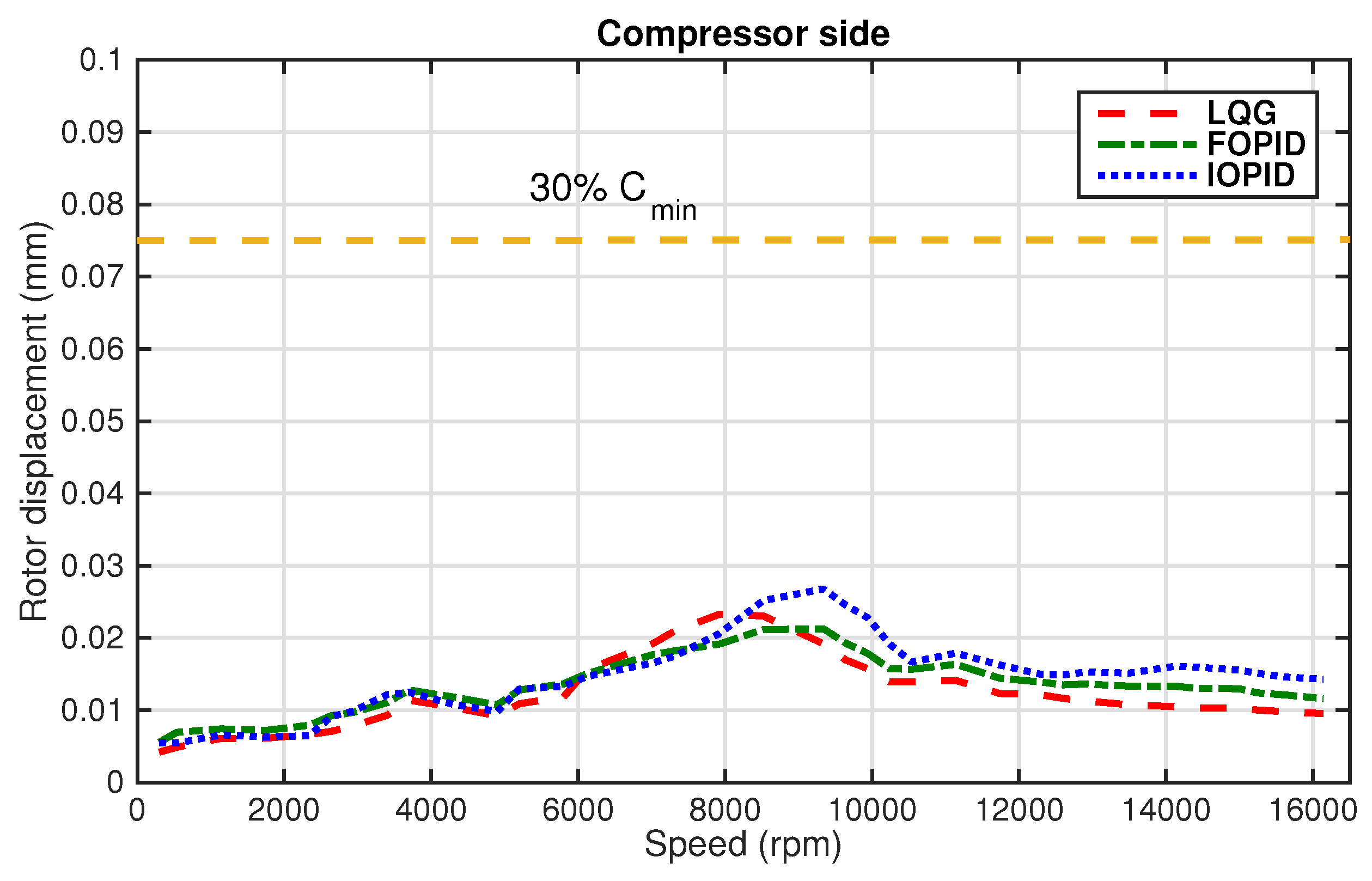
For the rotor lateral dynamics, the control objectives include the peak of the sensitivity function, the rotor vibration caused by the unbalanced forces, and the transient response performance. The design begins with the determination of whether to use the centralized or the decentralized control structure. The simulation results reveal that the centralized control structure provides better performance. Afterward, three tuning methods namely, the Genetic Algorithm (GA) method, the Differential Evolution (DE) method, and the Particle Swarm Optimization (PSO) method, are investigated for their effectiveness for the FOPID controller design. The results show that the DE method achieves the best performance. For comparison, the IOPID controller is designed based on the centralized structure and tuned by the DE optimization method. Moreover, the designed and implemented LQG controller reported in [
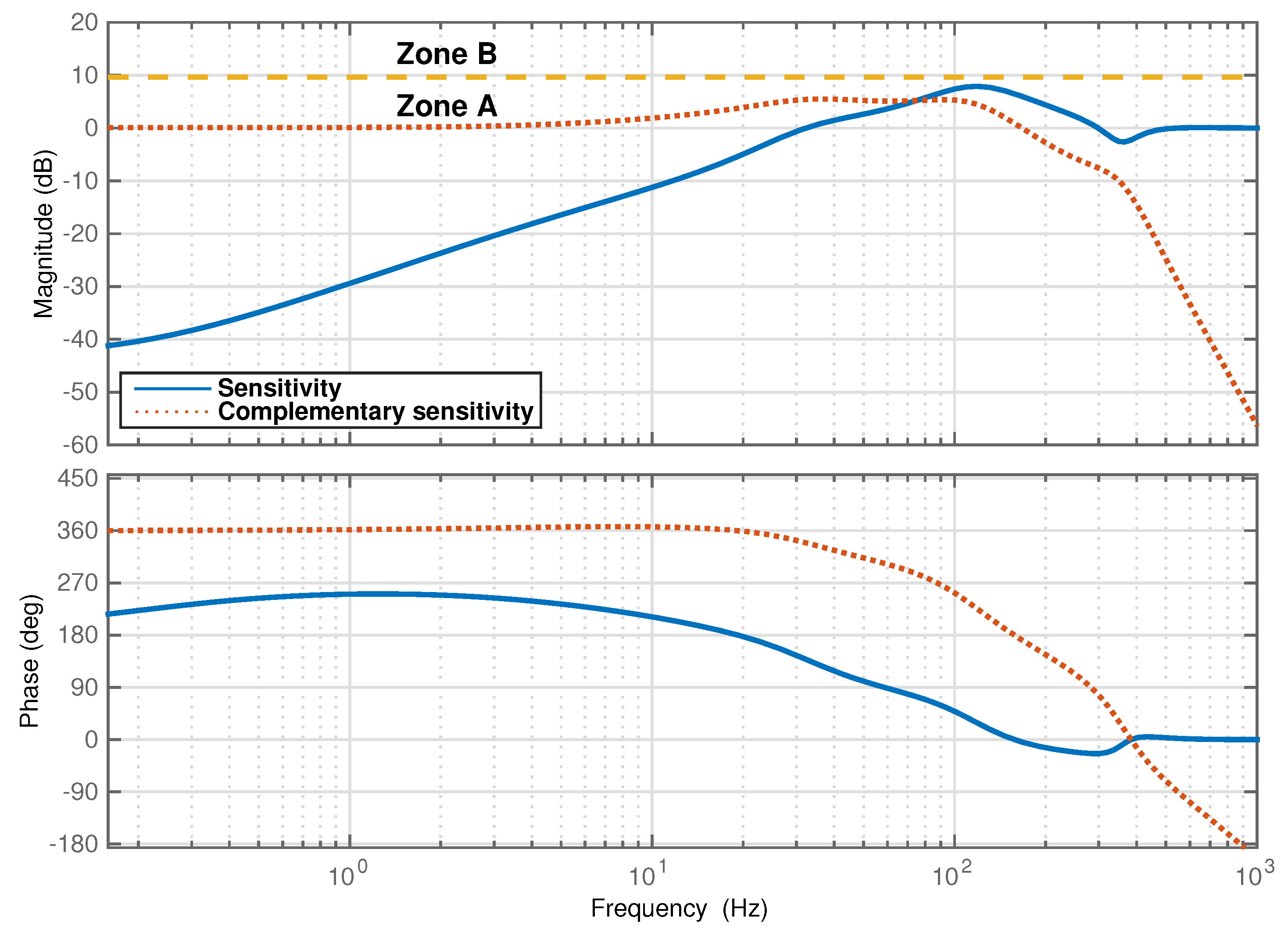
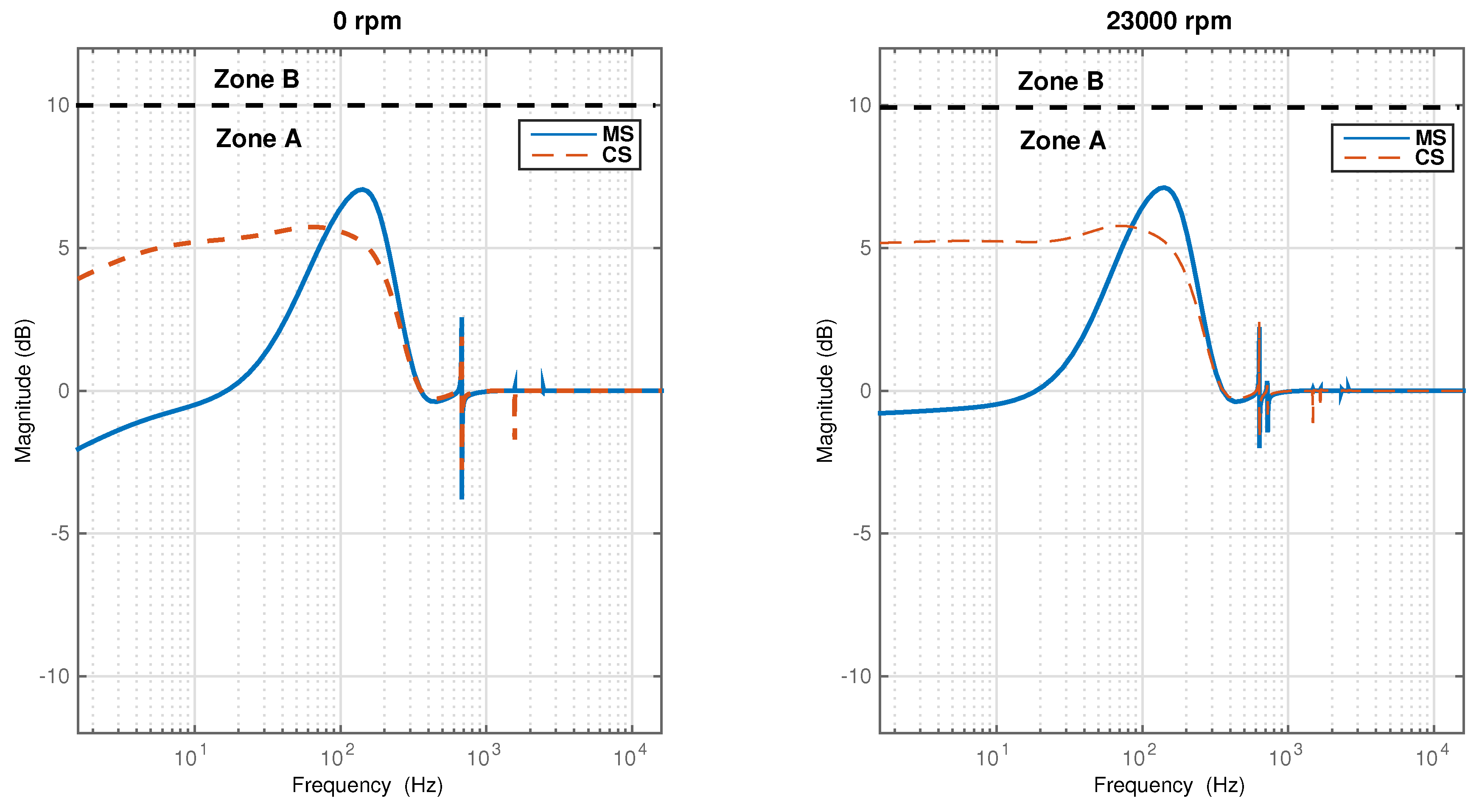
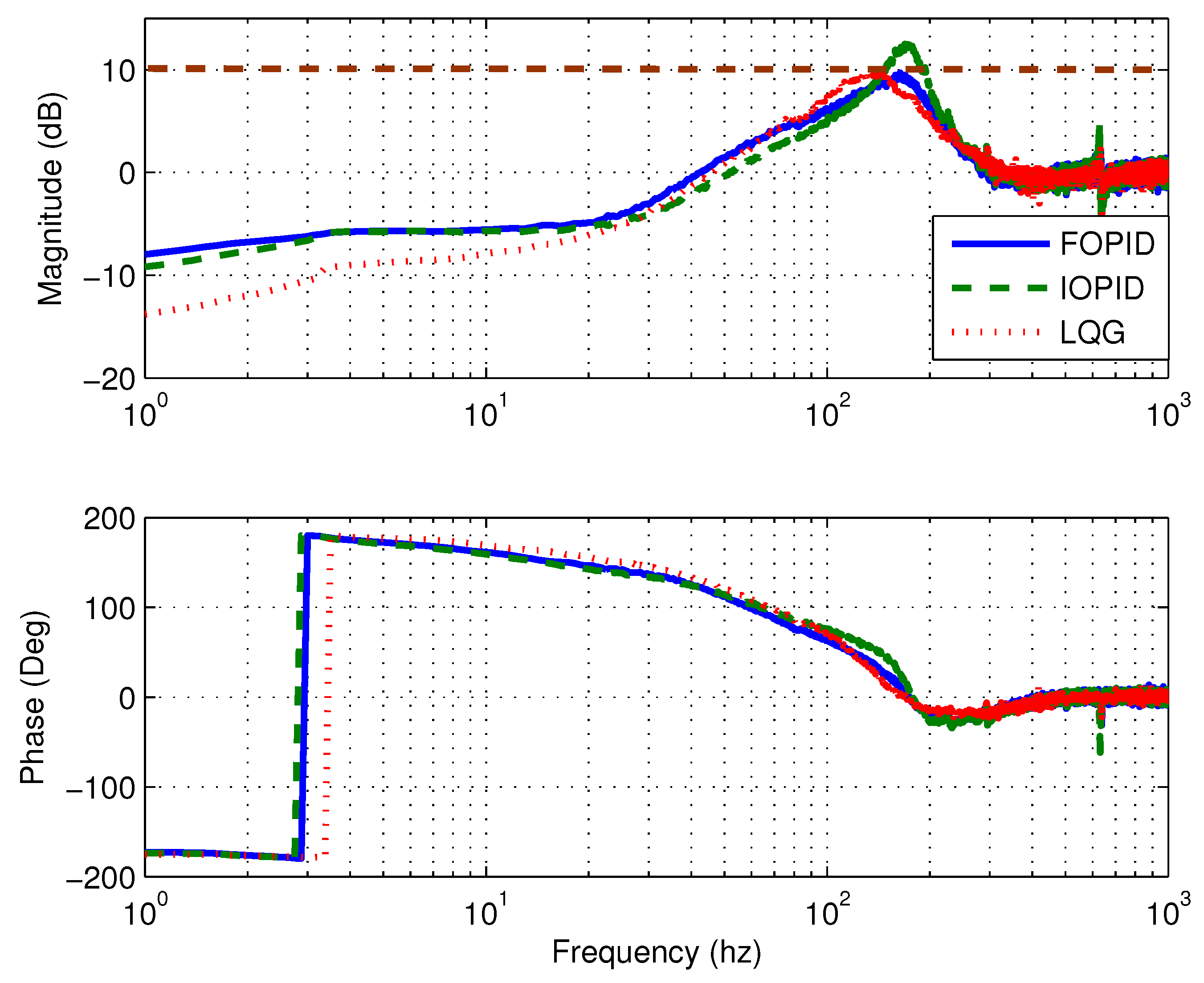
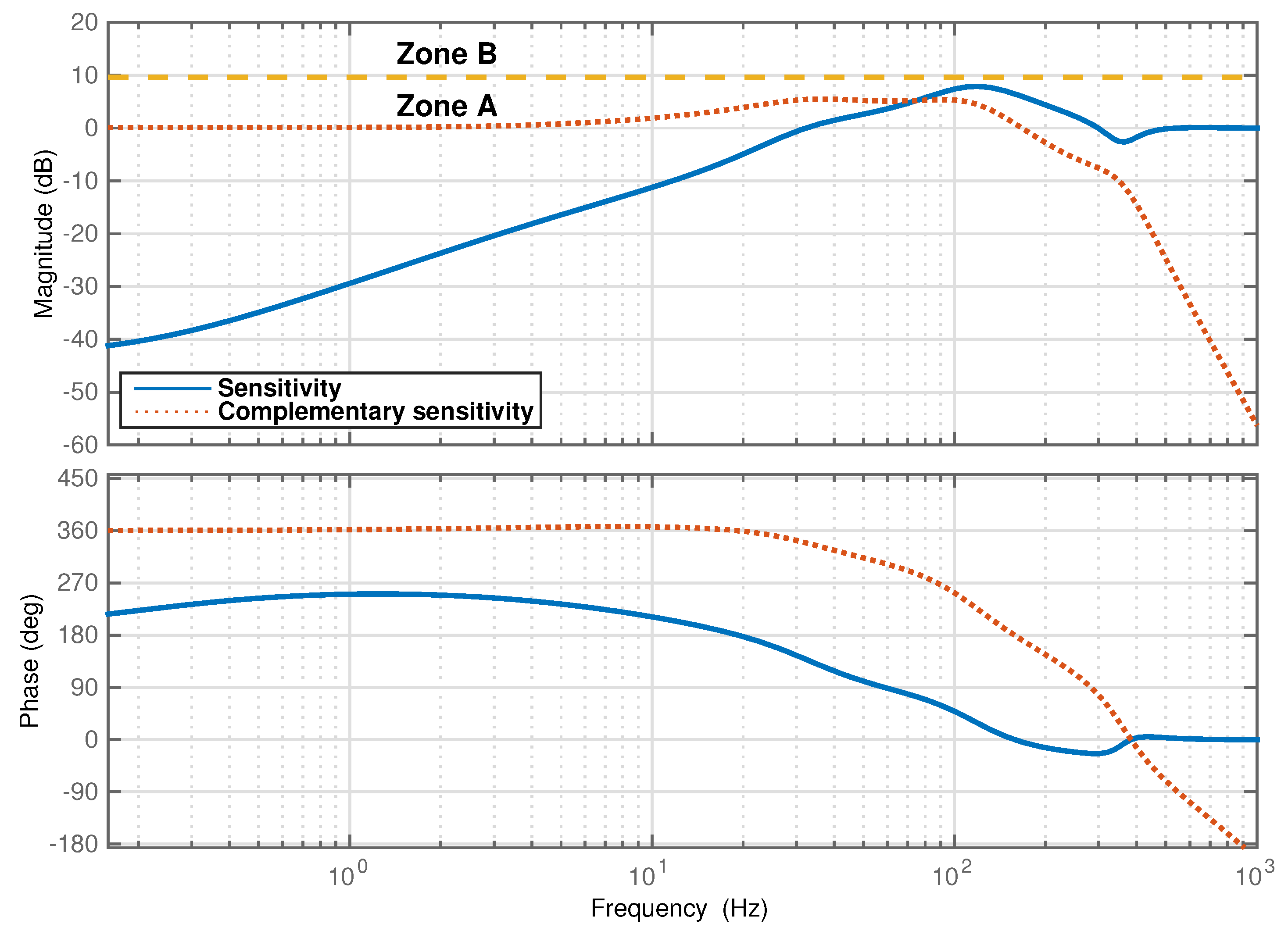
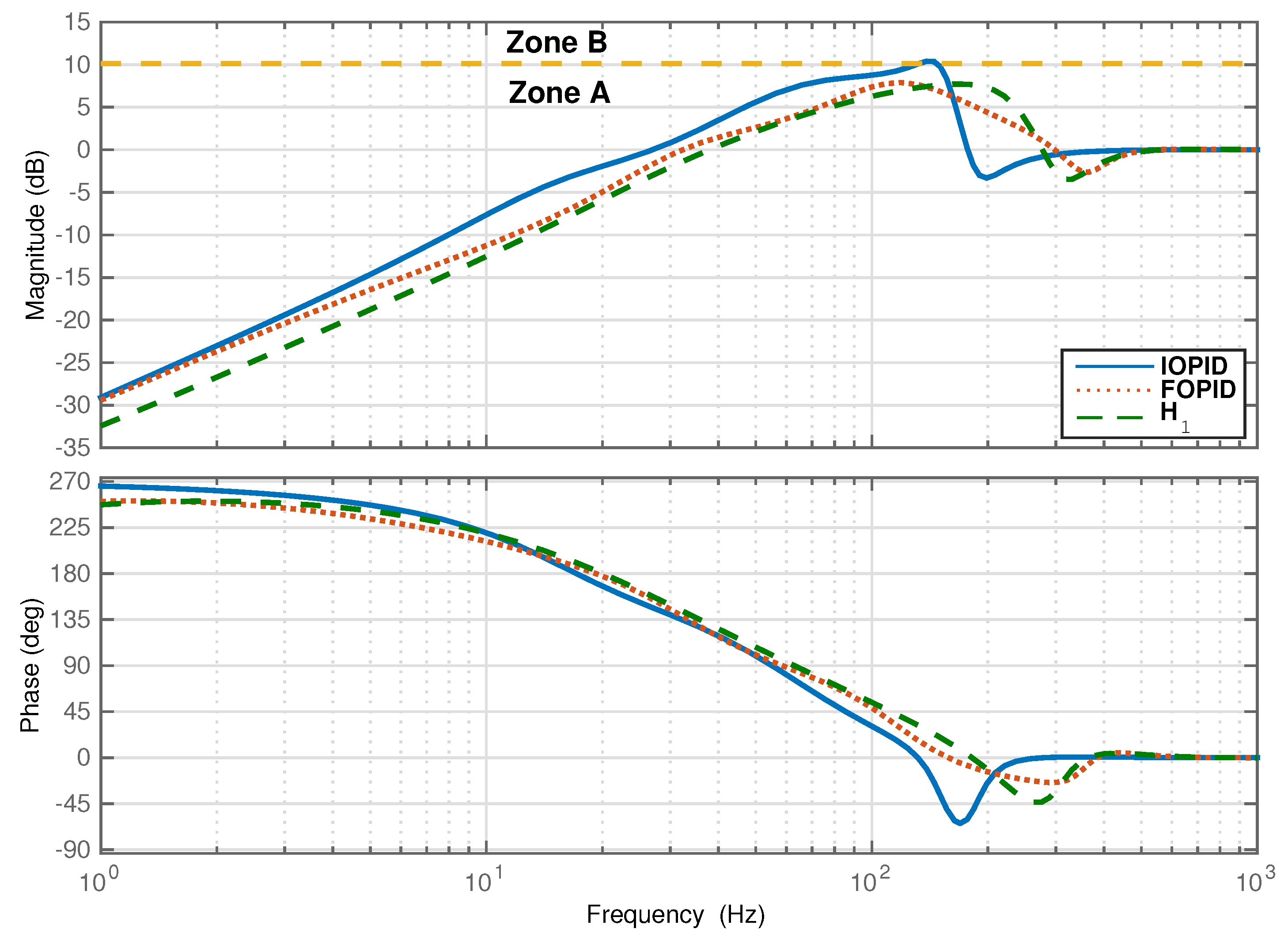
49] is also compared with the designed FOPID controller. The experimental results for rotor vibration with the rotor spinning at speeds ranging from 500 rpm to 16,500 rpm show that the FOPID results in the smallest rotor vibration and the IOPID results in the largest vibration peak, while the rotor vibration under the LQG controller falls in between the results under the FOPID and the IOPID controllers. In addition, in terms of the peak value of the sensitivity function, the FOPID controller results in the smallest and it falls into Zone A specified by the ISO standard, while LQG controller also achieve the Zone A specification with a slightly larger peak value of the sensitivity function than the FOPID controller. On the other hand, the IOPID controller can achieve only Zone B specification.
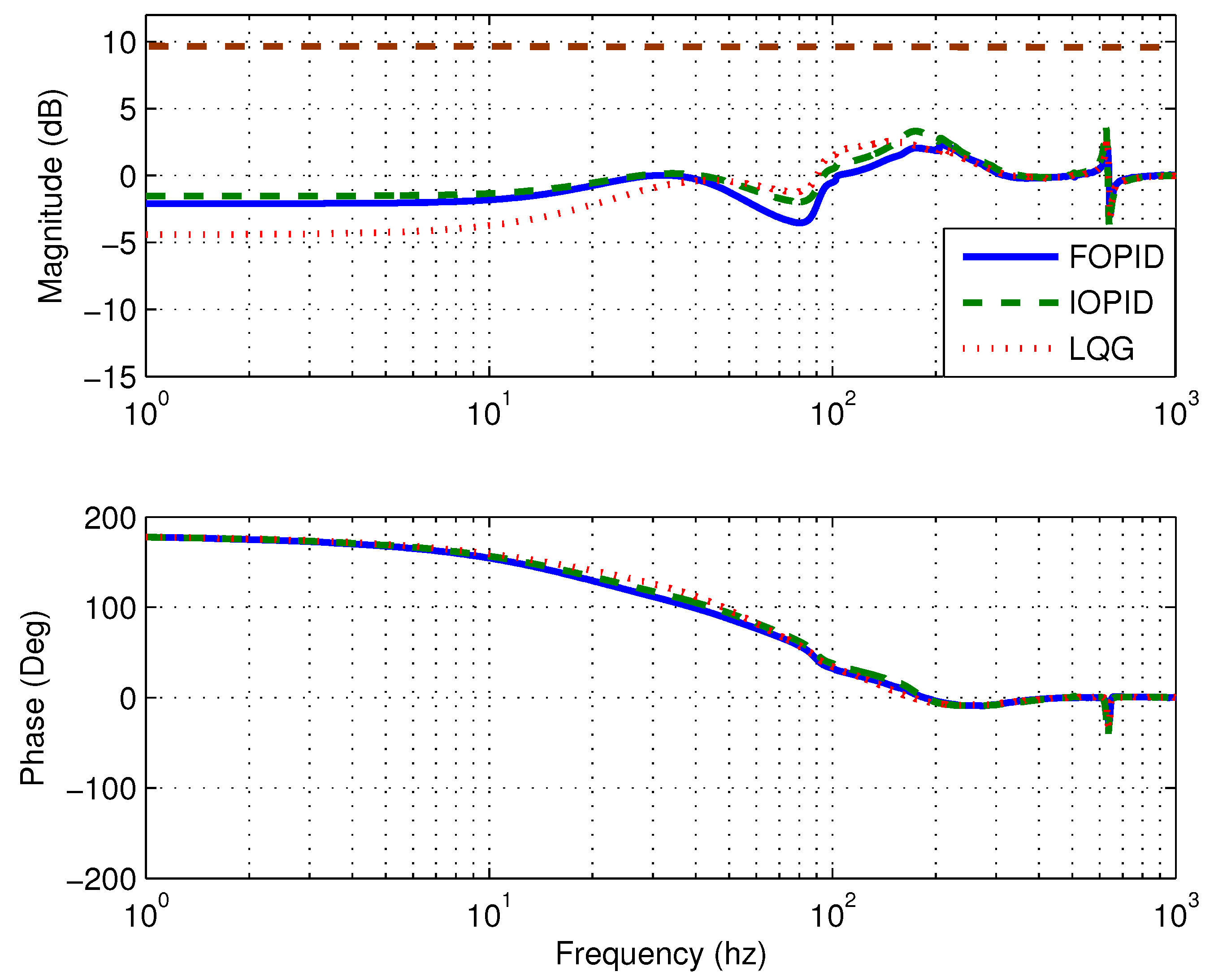
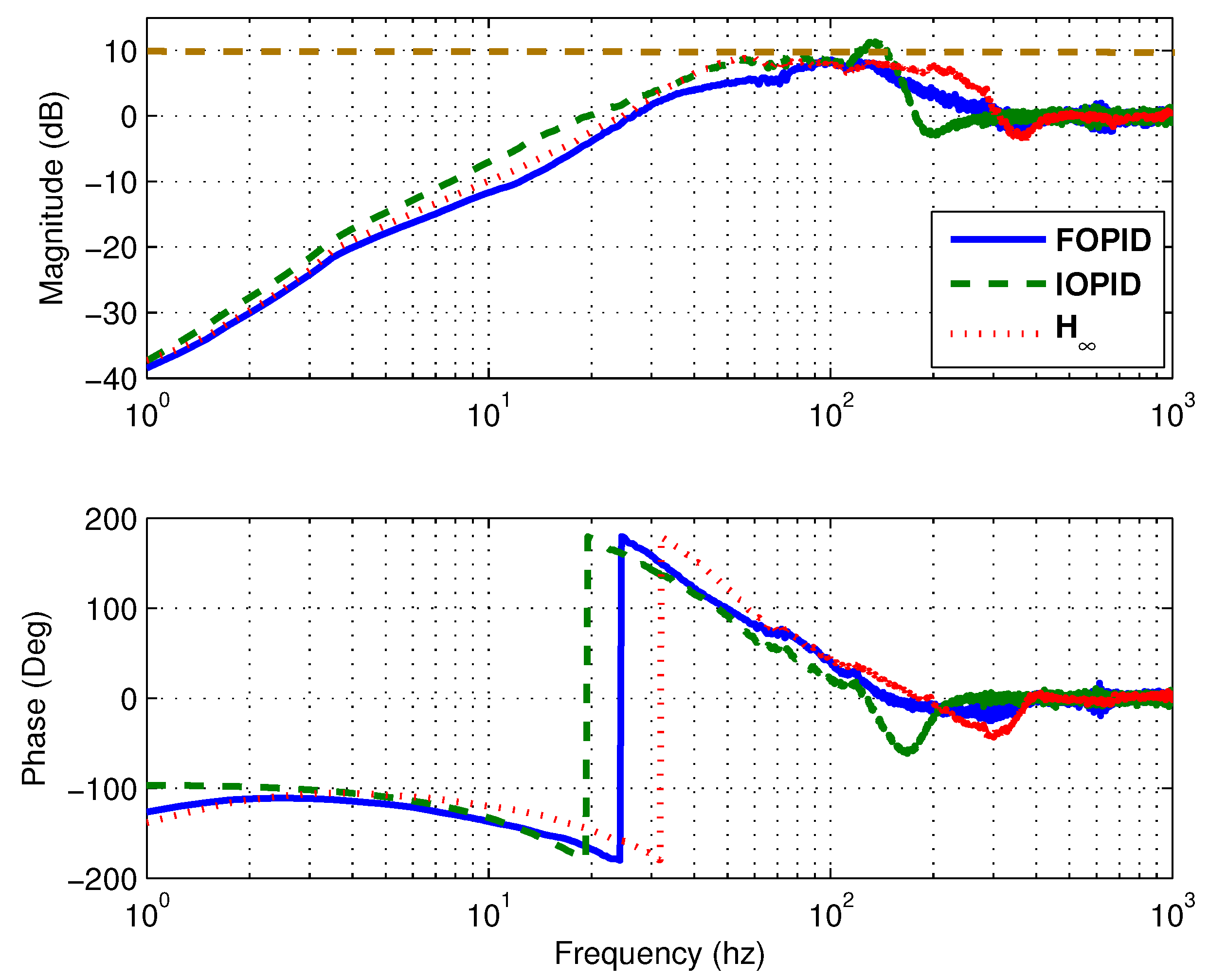
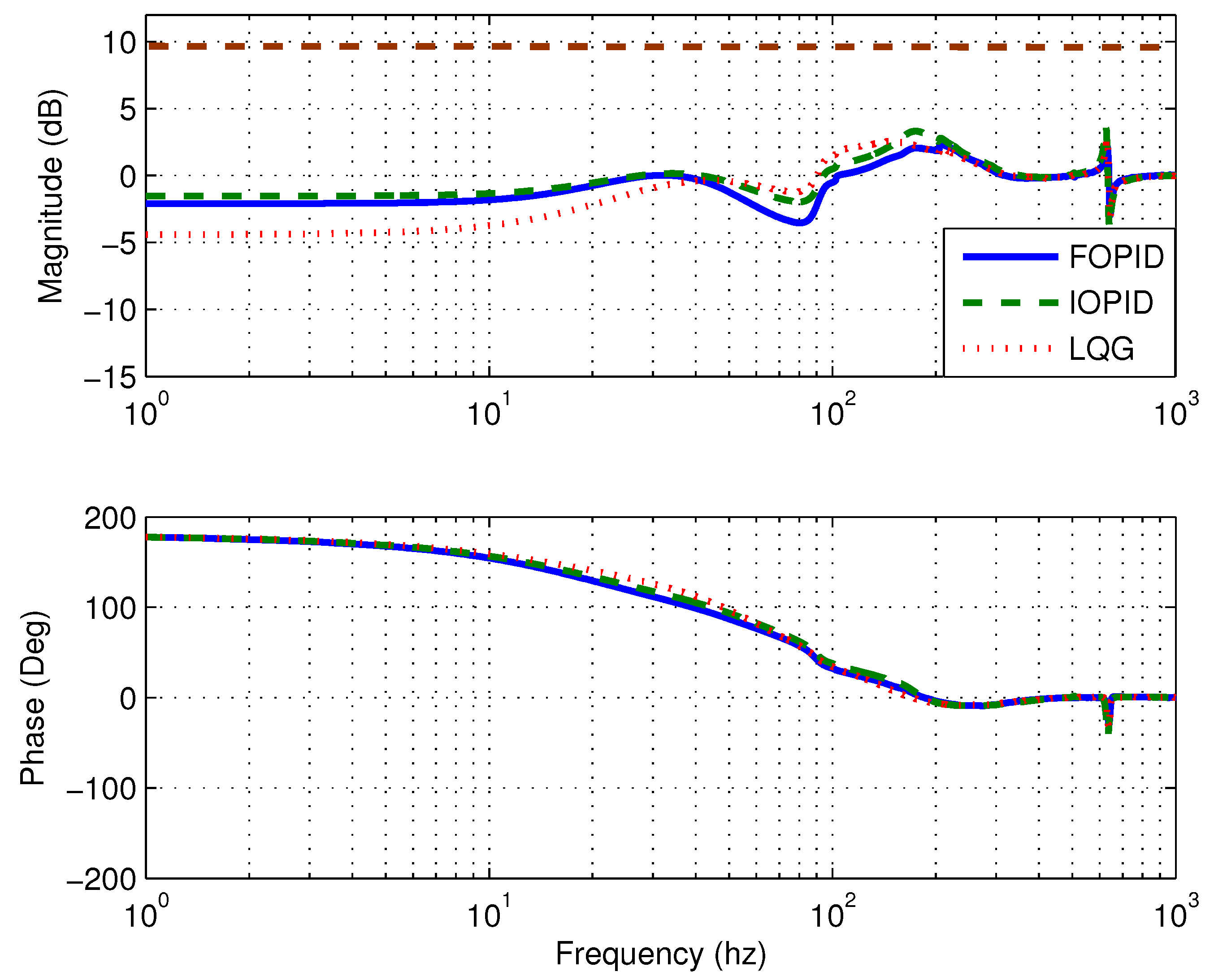
For the rotor axial dynamics, the FOPID controller is designed based on the objectives specified by weighting functions developed in the previous work [
49]. Three different tuning methods are investigated. The results show that the DE method can achieve the best performance as in the previous design. For comparison, the IOPID controller is designed based on the same objectives and the same optimization algorithm as the FOPID controller. Moreover, the designed
controller for the rotor axial dynamics in [
49] is also analyzed for comparison. Finally, the experimental results show that the FOPID controller achieves approximately the same value of the sensitivity function peak as achieved by
controller, and once again their performance falls into Zone A specification. In contrast, the value of the sensitivity function peak under the IOPID controller exceeds the Zone A level.
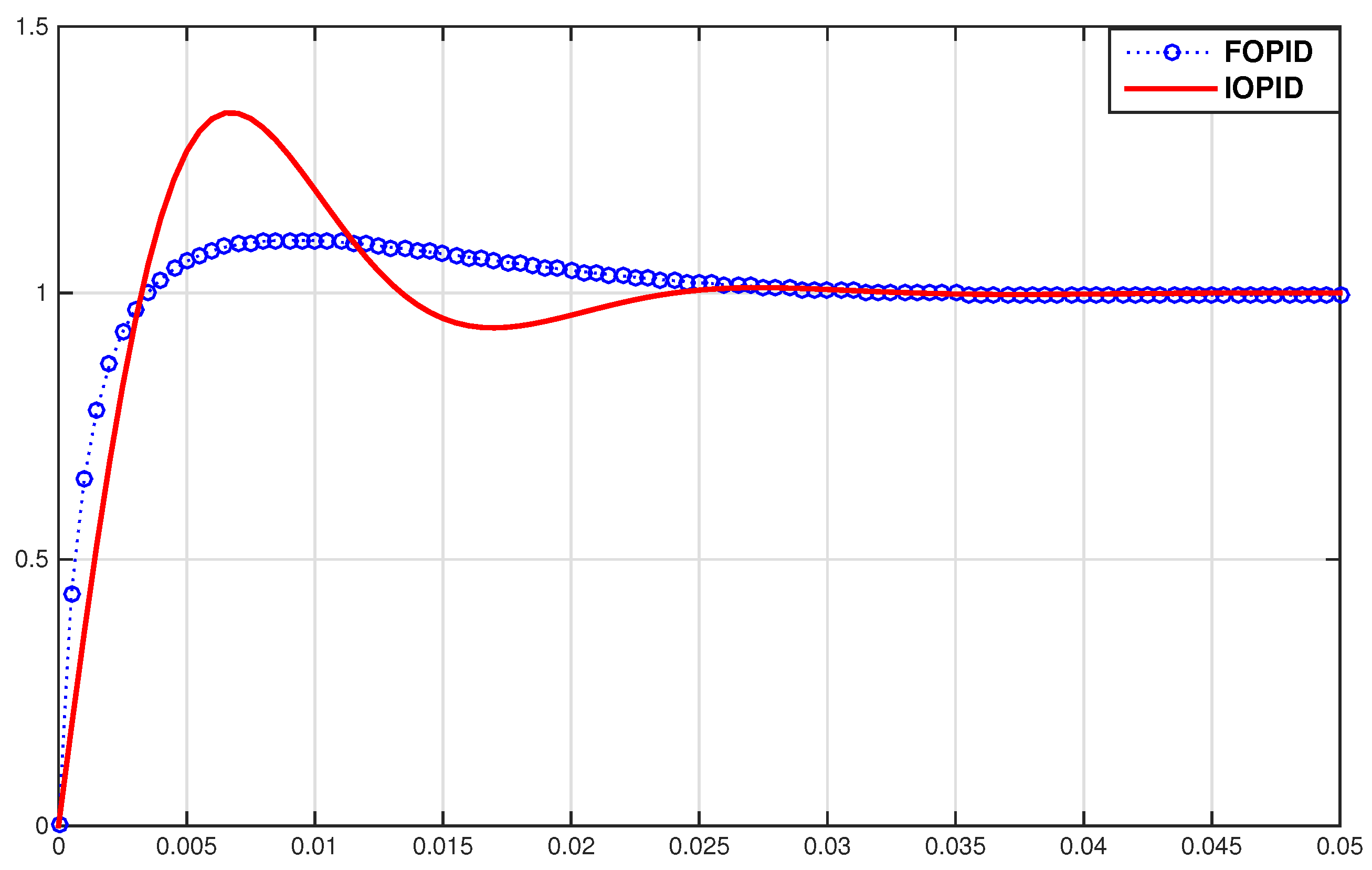
Based on the simulation and experimental results presented in
Section 4, if properly tuned, the FOPID controller designed for the rotor suspension outperforms the IOPID controller with only the variation of the integral and derivative orders. Furthermore, the FOPID controller can achieve performance similar to or even better than advanced controllers such as LQG and
, while the controller structure as well as the design process of the FOPID are simpler.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}