
A Permanent Magnet Hybrid Levitation Based on High-Temperature Superconducting Magnetic Levitation



Abstract
1. Introduction
2. Methods
2.1. Comparison of Electromagnetic Forces of PML System and HTS System
2.2. Hybrid Levitation System Coupling Effects
2.3. Feasibility Analysis of A-Shape Hybrid Maglev System
2.3.1. PML System
2.3.2. HTS Maglev System
3. Levitation Characteristics of A-Shape Hybrid Maglev System
3.1. A-Shape Hybrid Maglev System Design
3.2. The Levitation Characteristics of A-Shape PML System
3.2.1. Effect of Tilt Angle on the Levitation Characteristics of PML System
3.2.2. Effect of Magnetization Direction on Levitation Characteristics of PML System
3.3. The Levitation Characteristics of A-Shape HTS Maglev System
3.3.1. Effect of Tilt Angle on the Levitation Characteristics of HTS Maglev System
3.3.2. Effect of Magnetization Direction on the Levitation Characteristics of HTS Maglev System
4. Conclusions
- When the tilt angle α is 47°, the lateral deflection force of the PML system is transformed into the guidance force, but the levitation force cannot meet the load requirement. The tilt angle α = 45° is the optimal solution, which can satisfy the load requirement, and the lateral deflection force at 5 mm is reduced to 1804 N/m, which is 94.4% less than that of the RPML system.
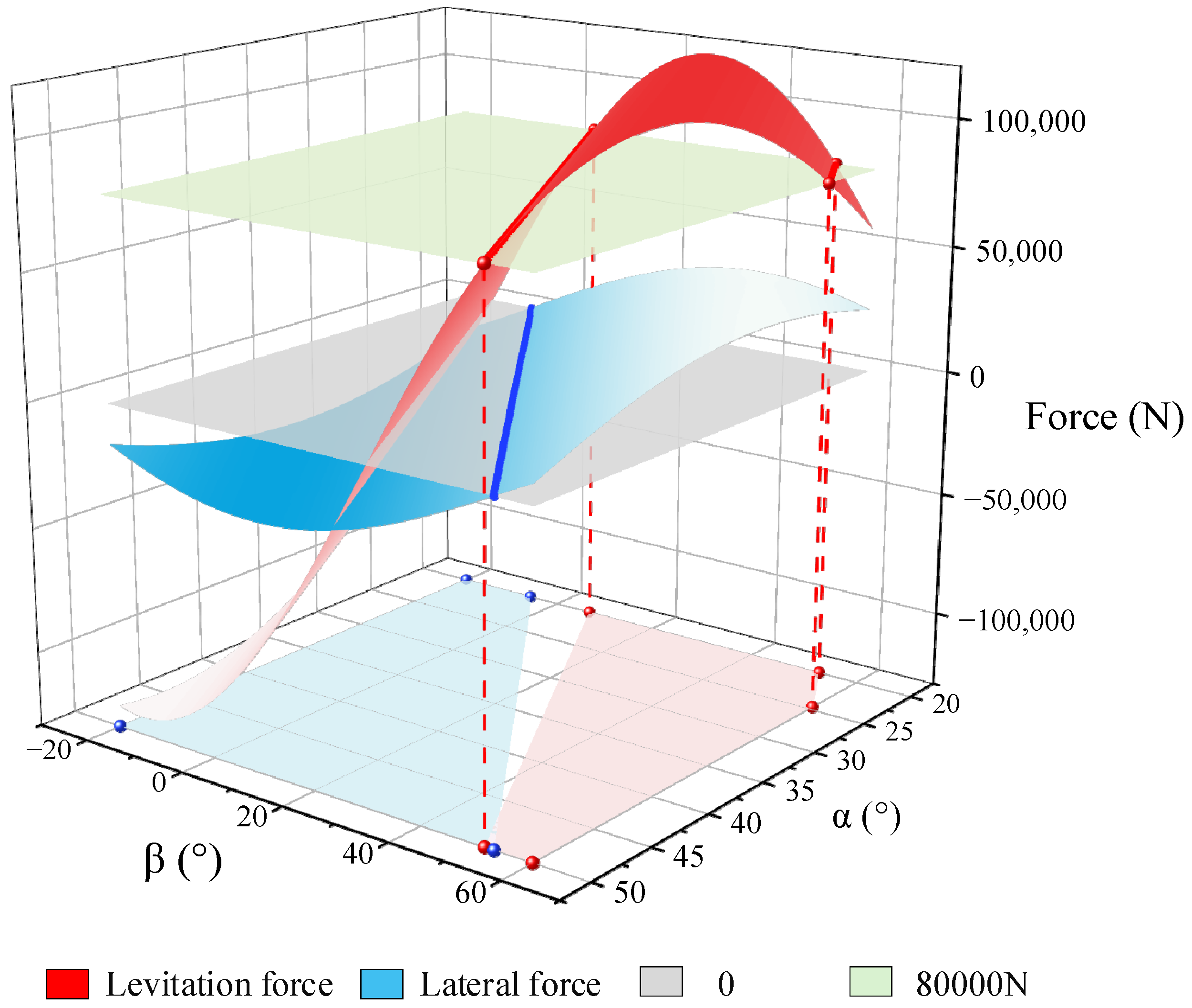
- When the tilt angle α of the PML system is 49° in conjunction with the magnetization direction β is 52°, the PML system can achieve the guidance property. However, the levitation force of this scheme will increase and then decrease with the reduction in the levitation height, which will have negative impact on the safety of the train operation.
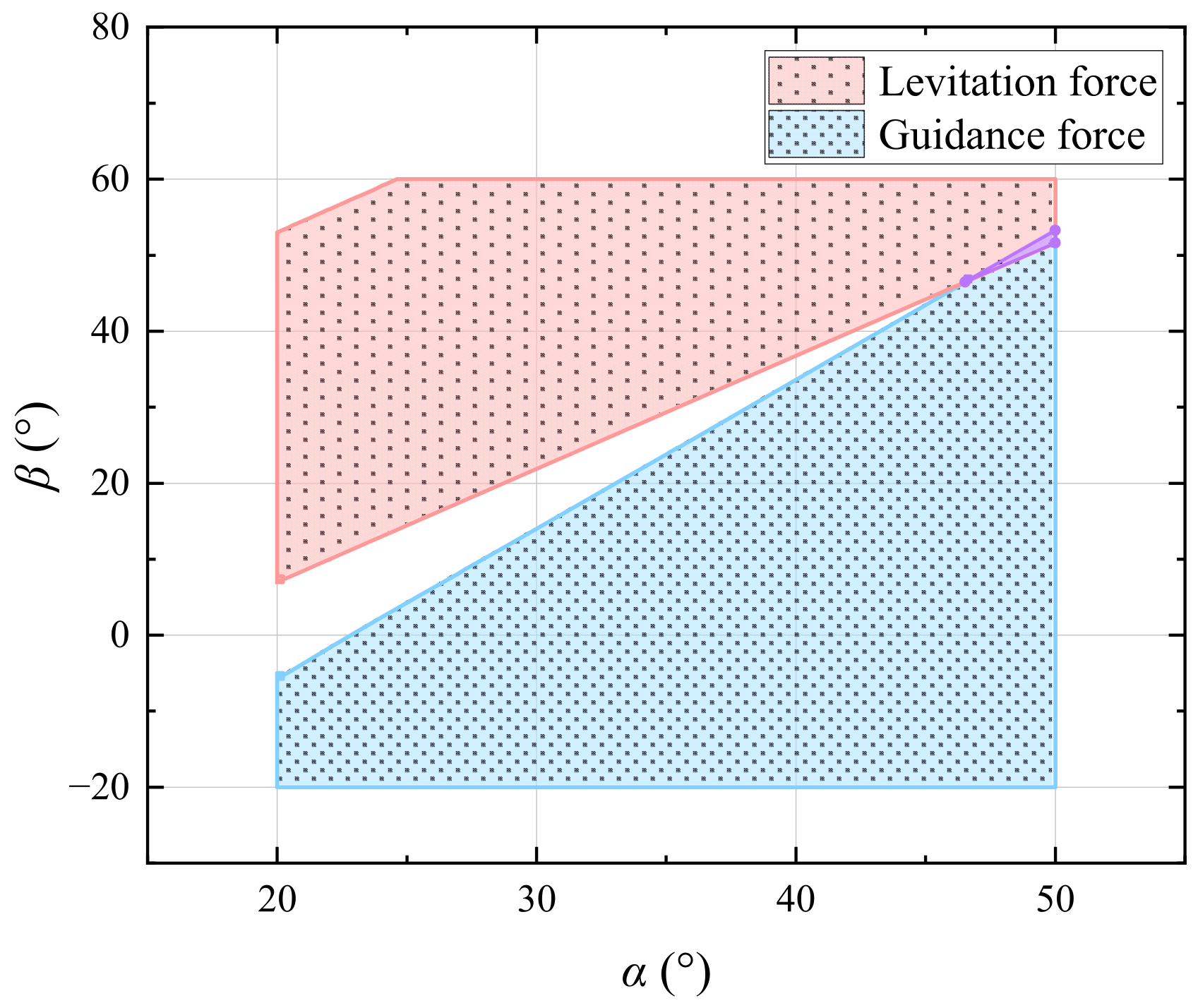
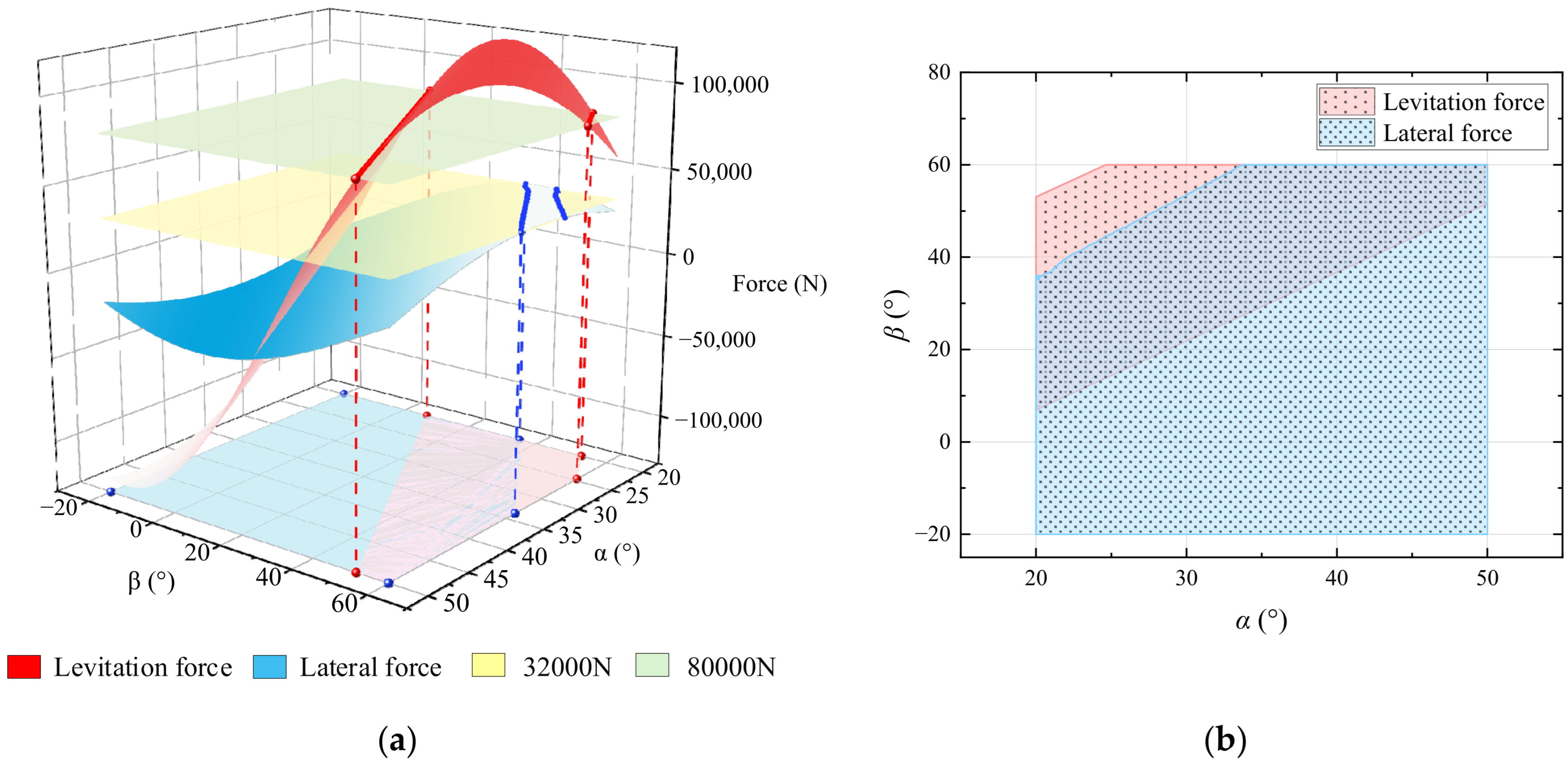
- The optimal solution of the scheme for the synergistic optimization of the tilt angle and magnetization direction of the PML system is α = 40° and β = 38°. The levitation force meets the load requirements. And the lateral deflection force of the system is reduced to 4971 N/m. The reduction is 84.6%.
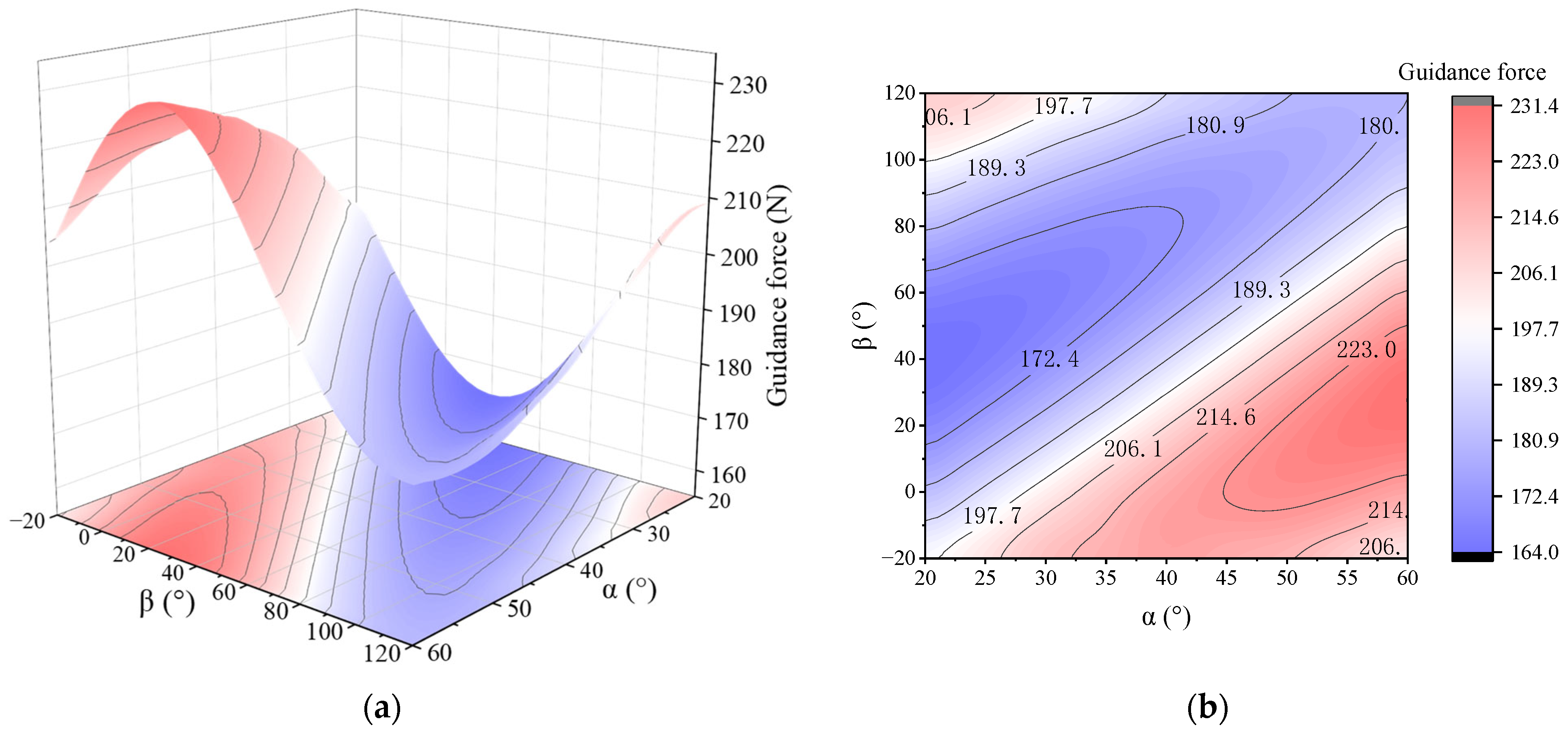
- For the A-shape HTS maglev system, almost all combinations of tilt angles and magnetization directions of the PM array can improve guidance ability. When the tilt angle is 60° and the magnetization direction is 30°, the lateral force is increased to 231 N, which is 45.3% higher than the RPML.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Han, H.; Kim, D. Magnetic Levitation Maglev Technology and Applications; Roess, R.P., Ed.; Springer: New York, NY, USA, 2016; pp. 167–222. [Google Scholar]
- Paden, B.A.; Snyder, S.T.; Paden, B.E.; Ricci, M.R. Modeling and control of an electromagnetic variable valve actuation system. IEEE ASME Trans. Mechatron. 2015, 20, 2654–5665. [Google Scholar] [CrossRef]
- Buth, B.; Lu, B. Dynamic analysis of vehicle-guideway interaction in a maglev cargo transportation system. In Proceedings of the International Mechanical Engineering Congress and Exposition (IMECE), Houston, TX, USA, 9–15 November 2012. [Google Scholar]
- Jung, K.; Shim, K. Noncontact conveyance of conductive plate using omni-directional magnet wheel. Mechatronics 2010, 20, 496–502. [Google Scholar] [CrossRef]
- Fang, J.; Montgomery, D.; Roderick, L. A novel magpipe pipeline transportation system using linear motor drives. Proc. IEEE 2009, 97, 1848–1855. [Google Scholar] [CrossRef]
- Shu, G.; Meisinger, R. State estimation and simulation of the magnetic levitation system of a high-speed maglev train. In Proceedings of the International Conference on Electrical and Mechanical Engineering and Information Technology (EMEIT), Harbin, China, 12–14 August 2011. [Google Scholar]
- Wang, J.; Wang, S.; Zeng, Y.; Huang, H.; Luo, F.; Xu, Z.; Tang, Q.; Lin, G.; Zhang, C.; Ren, Z.; et al. The first man-loading high temperature superconducting maglev test vehicle in the world. Phys. C Supercond. 2003, 378–381, 809–814. [Google Scholar] [CrossRef]
- Deng, Z.; Zhang, W.; Zheng, J.; Ren, Y.; Jiang, D.; Zheng, X.; Zhang, J.; Gao, P.; Lin, Q.; Song, B.; et al. A high-temperature superconducting maglev ring test line developed in Chengdu, China. IEEE Trans. Appl. Supercond. 2016, 26, 3602408. [Google Scholar] [CrossRef]
- Deng, Z.; Li, J.; Zhang, W.; Gou, Y.; Ren, Y.; Zheng, J. High-temperature superconducting magnetic levitation vehicles: Dynamic characteristics while running on a ring test line. IEEE Veh. Technol. Mag. 2017, 12, 95–102. [Google Scholar] [CrossRef]
- Gao, T.; Yang, J.; Jia, L.; Deng, Y.; Zhang, W.; Zhang, Z. Design of New Energy-Efficient Permanent Magnetic Maglev Vehicle Suspension System. IEEE Access 2019, 7, 135917–135932. [Google Scholar] [CrossRef]
- Ohashi, S.; Dodo, D. Levitation and guidance characteristics of permanent magnet-HTSC hybrid magnetic conveyance system. Electr. Eng. Jpn. 2008, 163, 73–79. [Google Scholar] [CrossRef]
- Ohashi, S.; Dodo, D. Influence of the propulsion system on the levitation characteristics of the HTSC-permanent magnet hybrid magnetically levitated system. IEEE Trans. Appl. Supercond. 2007, 17, 2083–2086. [Google Scholar] [CrossRef]
- Ohashi, S.; Nishio, R.; Hashikawa, T. Interaction between propulsion and levitation system in the HTSC-permanent magnet conveyance system. Physica C 2010, 470, 1768–1771. [Google Scholar] [CrossRef]
- Sumida, T.; Kamitani, Y.; Yamada, N.; Ohashi, S. Propulsion characteristics using pinned flux of the HTS in the permanent magnet-HTS hybrid magnetically levitated conveyance system. IEEE Trans. Appl. Supercond. 2016, 26, 3600905. [Google Scholar] [CrossRef]
- Nishio, R.; Ikeda, M.; Sasaki, R.; Ohashi, S. Study on control method of running velocity for the permanent magnet-HTSC hybrid magnetically levitated conveyance system. Physica C 2011, 471, 1492–1496. [Google Scholar] [CrossRef]
- Abdioglu, M.; Ozturk, K.; Gedikli, H.; Ekici, M.; Cansiz, A. Levitation and guidance force efficiencies of bulk YBCO for different permanent magnetic guideways. J. Alloys Compd. 2015, 630, 260–265. [Google Scholar] [CrossRef]
- Abdioglu, M.; Kabaer, M.; Ozturk, K.; Erdem, O.; Celik, S. Lateral position effect of auxiliary permanent magnets on the magnetic force properties of cylindrical YBCO. J. Supercond. Nov. Magn. 2017, 30, 2933–2938. [Google Scholar] [CrossRef]
- Ozturk, K.; Abdioglu, M.; Mollahasanoglu, H. Magnetic Force Performance of Hybrid Multi-surface HTS Maglev System With Auxiliary Onboard PMs. IEEE Trans. Appl. Supercond. 2023, 33, 3600206. [Google Scholar] [CrossRef]
- Zheng, J.; Sun, R.; Li, H.; Zheng, X.; Deng, Z. A Manned Hybrid Maglev Vehicle Applying Permanent Magnetic Levitation (PML) and Superconducting Magnetic Levitation (SML). IEEE Trans. Appl. Supercond. 2020, 30, 3600107. [Google Scholar] [CrossRef]
- Bao, Y.; Zheng, J.; Sun, R.; Deng, Z. Magnetic force characteristics enhancement by a novel permanent magnetic levitation (PML) analysis method for hybrid maglev. J. Magn. Magn. Mater. 2021, 529, 167888. [Google Scholar] [CrossRef]
- Ye, J.; Zhan, P.; Zeng, J.; Kuang, H.; Deng, Y.; Fan, K.; Su, B. Concise magnetic force model for Halbach-type magnet arrays and its application in permanent magnetic guideway optimization. J. Magn. Magn. Mater. 2023, 587, 171301. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Rated load requirement | 16 | t |
| Bogie number | 2 | |
| Total length of on-board PM | 4 | m |
| On-board PM brand | N52M | |
| Guideway PM brand | N45 | |
| On-board PM width | 30 | mm |
| On-board PM height | 60 | mm |
| Guideway PM width | 30 | mm |
| Guideway PM height | 22 | mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, T.; Gao, L.; Yin, P.; Peng, C.; Deng, Z. A Permanent Magnet Hybrid Levitation Based on High-Temperature Superconducting Magnetic Levitation. Actuators 2025, 14, 285. https://doi.org/10.3390/act14060285
Xing T, Gao L, Yin P, Peng C, Deng Z. A Permanent Magnet Hybrid Levitation Based on High-Temperature Superconducting Magnetic Levitation. Actuators. 2025; 14(6):285. https://doi.org/10.3390/act14060285
Chicago/Turabian StyleXing, Tianyu, Lingfeng Gao, Peiyu Yin, Can Peng, and Zigang Deng. 2025. "A Permanent Magnet Hybrid Levitation Based on High-Temperature Superconducting Magnetic Levitation" Actuators 14, no. 6: 285. https://doi.org/10.3390/act14060285
APA StyleXing, T., Gao, L., Yin, P., Peng, C., & Deng, Z. (2025). A Permanent Magnet Hybrid Levitation Based on High-Temperature Superconducting Magnetic Levitation. Actuators, 14(6), 285. https://doi.org/10.3390/act14060285