
Robust Geometric Control for a Quadrotor UAV with Extended Kalman Filter Estimation


Abstract
1. Introduction
- (1)
- A novel control scheme is presented for a quadrotor UAV that incorporates an online estimation of inertia parameters. This enables the system to effectively address uncertainties during maneuvers, enhance robustness, and improve performance in diverse operating environments.
- (2)
- By leveraging the equivalence between quaternions and rotation matrices, the proposed approach represents attitude with quaternions within the EKF parameter estimator. Compared to the rotation matrix representation, this significantly reduces estimation dimensions and computational time while maintaining effective control performance.
- (3)
- The effectiveness of the proposed scheme is validated through both simulations and real-world experiments, demonstrating superior performance compared to the traditional geometric controller. The real-world experiment can be viewed online at https://youtu.be/p4RYlQRqmow (accessed on 27 May 2024).
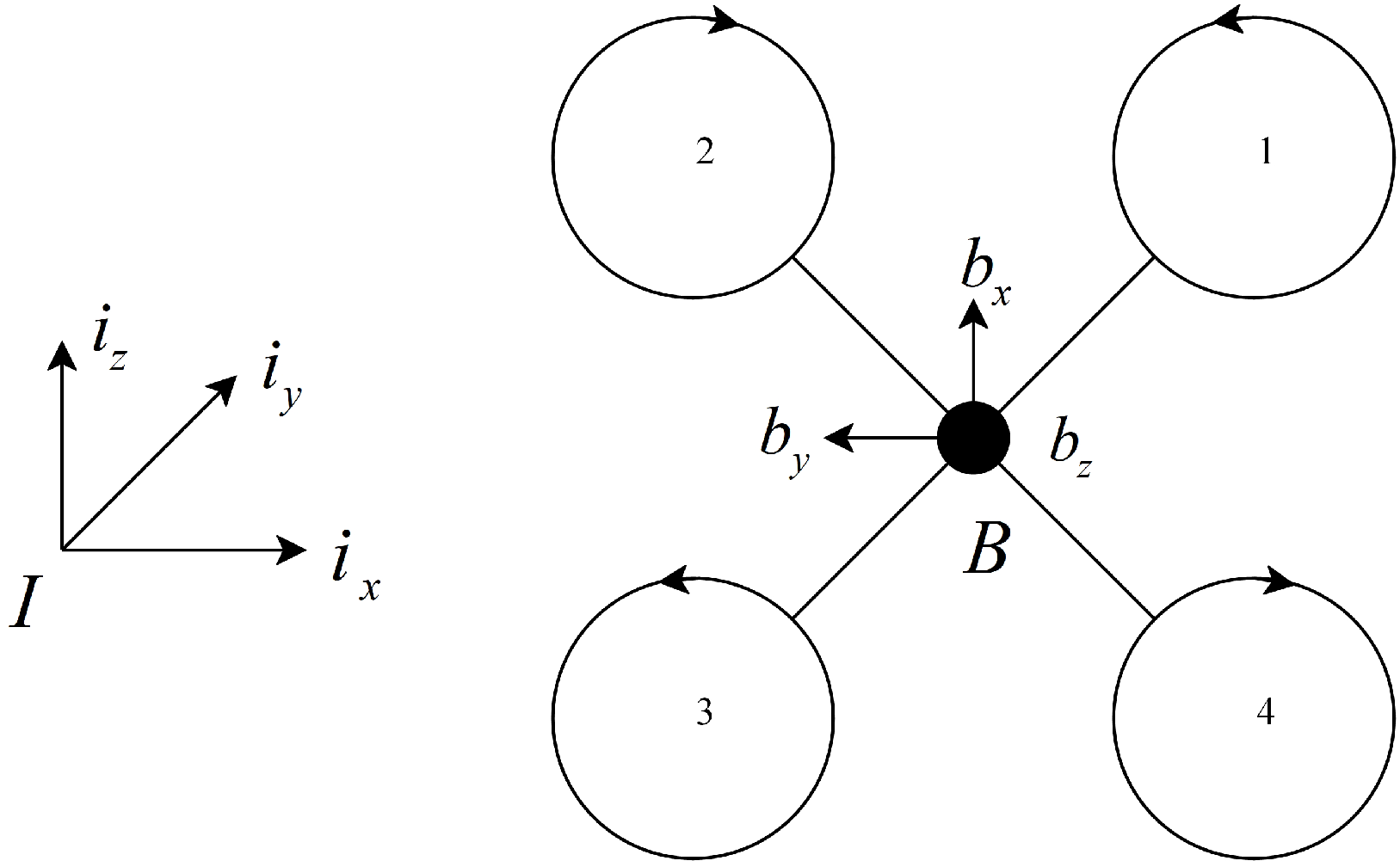
2. Quadrotor System Model
2.1. Quadrotor Dynamics
2.2. Observability Analysis
3. Robust Geometric Controller
3.1. EKF Estimator
3.2. SE(3) Geometric Controller
4. Simulation and Experiment Results
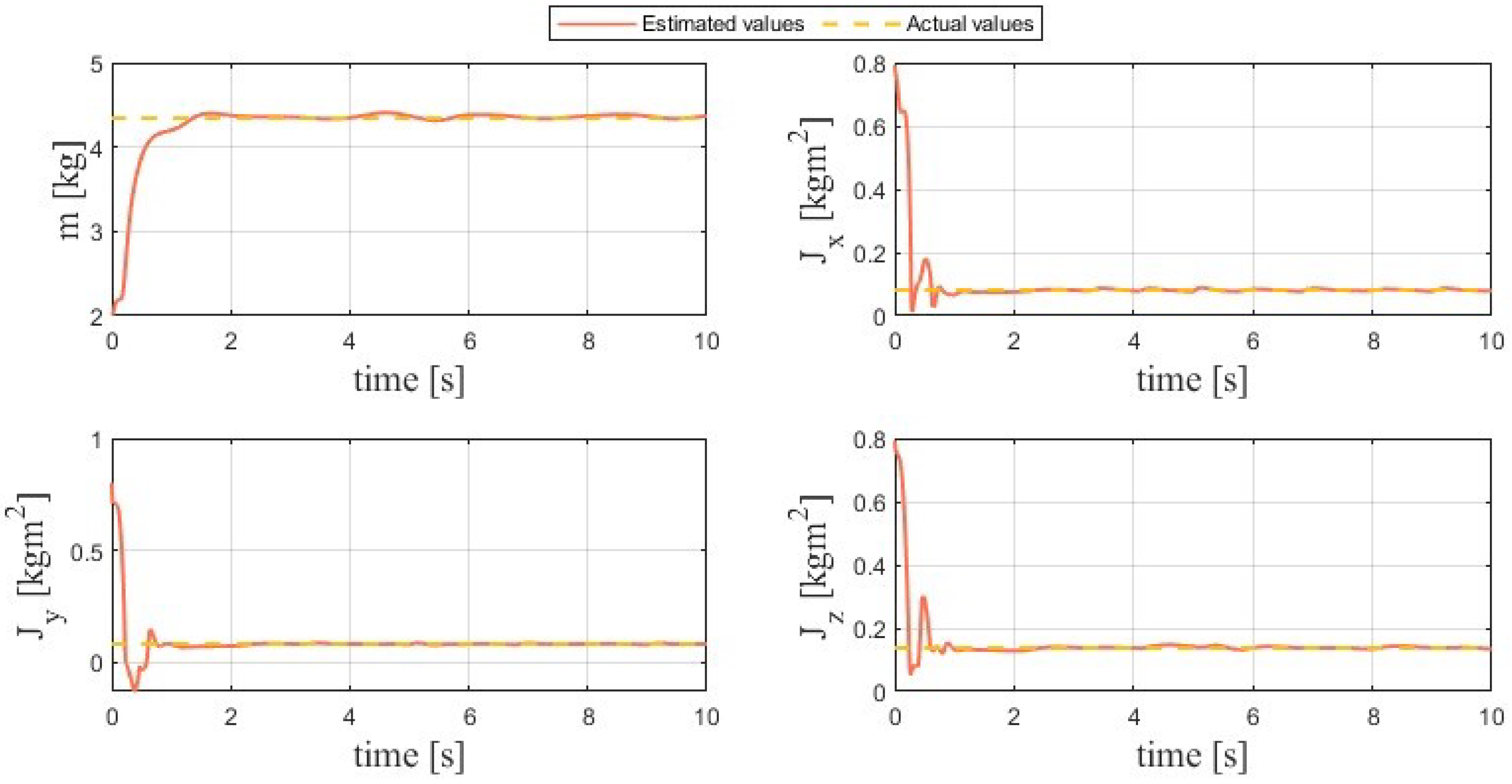
4.1. Simulation
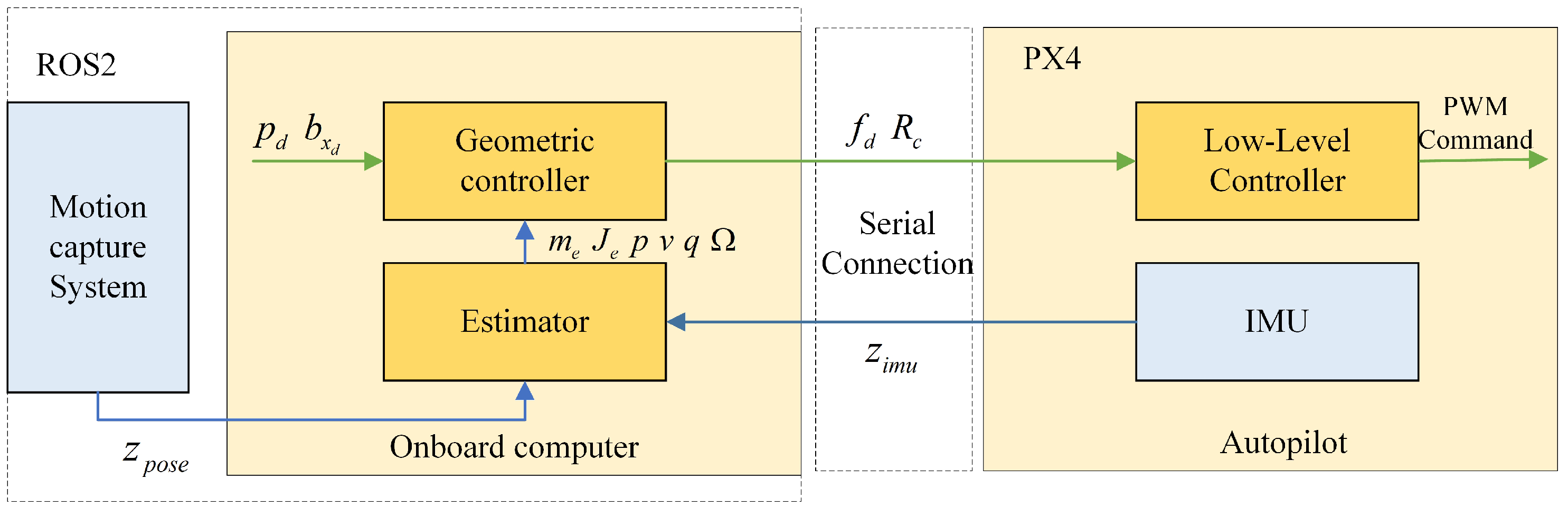
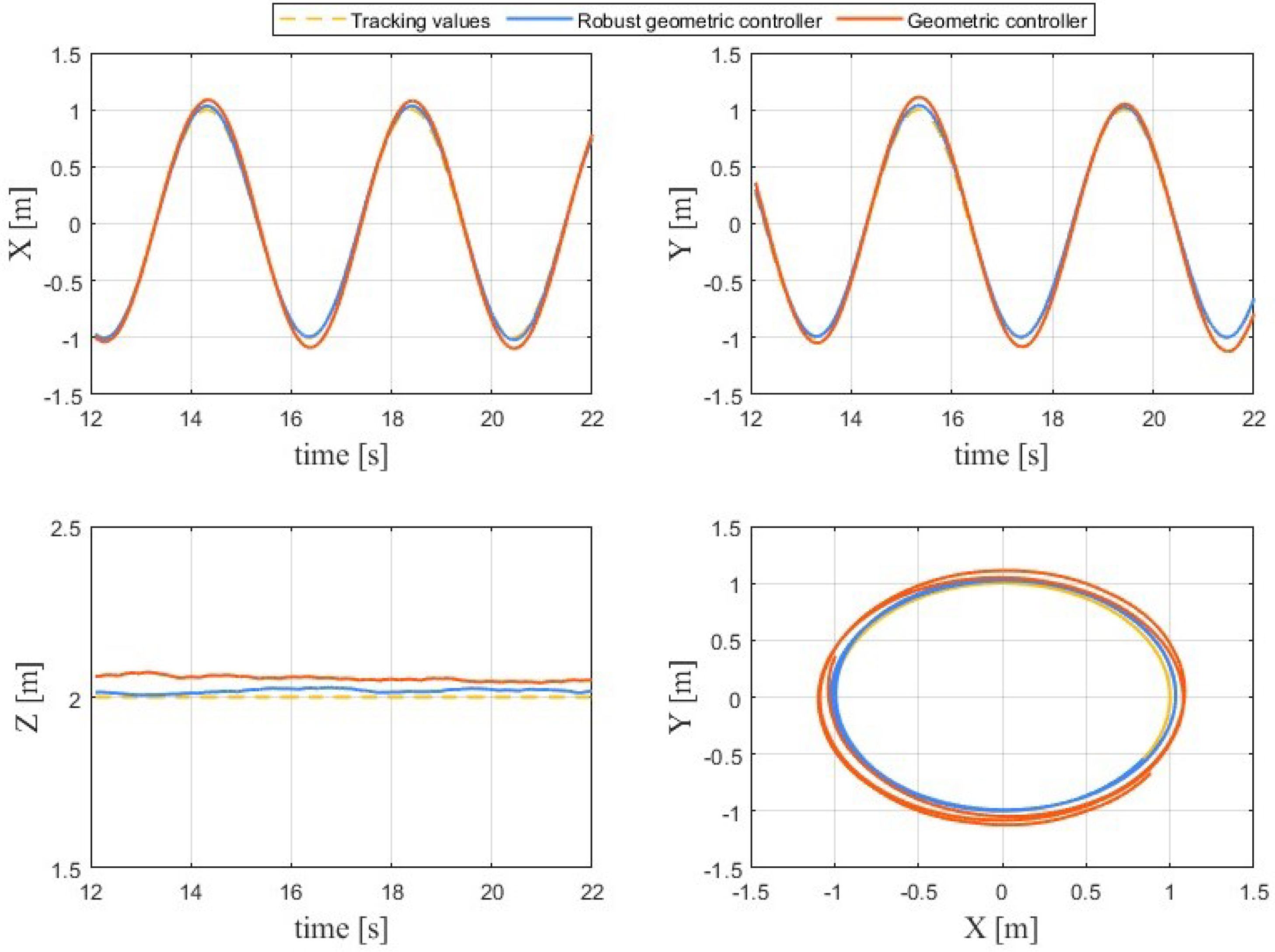
4.2. Experiments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Naidoo, Y.; Stopforth, R.; Bright, G. Development of an UAV for Search & Rescue Applications Mechatronic Integration for a Quadrotor Helicopter. In Proceedings of the IEEE AFRICON, Victoria Falls, Zambia, 13–15 September 2011. [Google Scholar]
- Chen, T.; Shan, J. A Novel Cable-Suspended Quadrotor Transportation System: From Theory to Experiment. Aerosp. Sci. Technol. 2020, 104, 105974. [Google Scholar] [CrossRef]
- Elmokadem, T. Distributed Coverage Control of Quadrotor Multi-UAV Systems for Precision Agriculture. IFAC Pap. Online 2019, 52, 51–256. [Google Scholar] [CrossRef]
- Pounds, P.E.I.; Bersak, D.R.; Dollar, A.M. Stability of Small-Scale UAV Helicopters and Quadrotors with Added Payload Mass under PID Control. Auton. Robot. 2012, 33, 129–142. [Google Scholar] [CrossRef]
- Hanif, A.; Putro, I.E.; Riyadl, A.; Sudiana, O.; Irwanto, H.Y. Towards High-Precision Quadrotor Trajectory Following Capabilities: Modelling, Parameter Estimation, and LQR Control. Latv. J. Phys. Tech. Sci. 2024, 61, 89–104. [Google Scholar] [CrossRef]
- Elena Antonio-Toledo, M.; Sanchez, E.N.; Alanis, A.Y.; Florez, J.A.; Perez-Cisneros, M.A. Real-Time Integral Backstepping with Sliding Mode Control for a Quadrotor UAV. IFAC Pap. Online 2018, 51, 549–554. [Google Scholar] [CrossRef]
- Dong, W.; Gu, G.Y.; Zhu, X.; Ding, H. High-Performance Trajectory Tracking Control of a Quadrotor with Disturbance Observer. Sens. Actuators Phys. 2014, 211, 67–77. [Google Scholar] [CrossRef]
- Lee, T.; Leok, M.; McClamroch, N.H. Geometric Tracking Control of a Quadrotor UAV on SE(3). In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 5420–5425. [Google Scholar] [CrossRef]
- Goodarzi, F.A.; Lee, T. Extended Kalman Filter on SE(3) for Geometric Control of a Quadrotor UAV. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1371–1380. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, X.; Li, T.; Zhang, S.; Zhang, X. Barrier Function Enhanced Geometric Controller for Safe Control of a Quadrotor UAV. In Proceedings of the 2022 International Conference on Advanced Robotics and Mechatronics (ICARM), Guilin, China, 9–11 July 2022; pp. 187–192. [Google Scholar] [CrossRef]
- Sharma, M.; Kar, I. Finite Time Disturbance Observer Based Geometric Control of Quadrotors. IFAC Pap. Online 2020, 53, 295–300. [Google Scholar] [CrossRef]
- Sharma, M. Geometric Control of Uncertain Quadrotor with External Disturbances. In Proceedings of the 2022 IEEE 19th India Council International Conference (INDICON), Kochi, India, 24–26 November 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, J.; Yuan, X.; Zhu, B. Geometric Control for Trajectory-Tracking of a Quadrotor UAV with Suspended Load. IET Control Theory Appl. 2022, 16, 1271–1281. [Google Scholar] [CrossRef]
- Goodman, J.R.R.; Beckers, T.; Colombo, L.J.J. Geometric Control for Load Transportation With Quadrotor UAVs by Elastic Cables. IEEE Trans. Control Syst. Technol. 2023, 31, 2848–2862. [Google Scholar] [CrossRef]
- Shastry, A.K.; Paley, D.A. System Identification for High-Performance UAV Control in Wind. Int. J. Robust Nonlinear Control 2023, 33, 10451–10467. [Google Scholar] [CrossRef]
- Bansal, S.; Akametalu, A.K.; Jiang, F.J.; Laine, F.; Tomlin, C.J. Learning Quadrotor Dynamics Using Neural Network for Flight Control. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 4653–4660. [Google Scholar] [CrossRef]
- Bauersfeld, L.; Kaufmann, E.; Foehn, P.; Sun, S.; Scaramuzza, D. NeuroBEM: Hybrid Aerodynamic Quadrotor Model. In Proceedings of the Robotics: Science and Systems XVII, Robotics: Science and Systems Foundation, Virtual, 12–16 July 2021. [Google Scholar] [CrossRef]
- Kwon, G.; Lee, J.; Yang, H. Real-Time Observability-Aware Inertia Parameter Estimation for Quadrotors. IEEE Access 2023, 11, 24299–24314. [Google Scholar] [CrossRef]
- Yu, Y.; Tang, P.; Song, T.; Lin, D. A Two-Step Method for System Identification of Low-Cost Quadrotor. Aerosp. Sci. Technol. 2020, 96, 105551. [Google Scholar] [CrossRef]
- Munguía, R.; Urzua, S.; Grau, A. EKF-Based Parameter Identification of Multi-Rotor Unmanned Aerial Vehicles Models. Sensors 2019, 19, 4174. [Google Scholar] [CrossRef] [PubMed]
- Böhm, C.; Scheiber, M.; Weiss, S. Filter-Based Online System-Parameter Estimation for Multicopter UAVs. In Proceedings of the Robotics: Science and Systems XVII. Robotics: Science and Systems Foundation, Virtual, 12–16 July 2021. [Google Scholar] [CrossRef]
- Wüest, V.; Kumar, V.; Loianno, G. Online Estimation of Geometric and Inertia Parameters for Multirotor Aerial Vehicles. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 1884–1890. [Google Scholar] [CrossRef]
- Bianchi, D.; Di Gennaro, S.; Di Ferdinando, M.; Acosta Lua, C. Robust Control of UAV with Disturbances and Uncertainty Estimation. Machines 2023, 11, 352. [Google Scholar] [CrossRef]
- Svacha, J.; Paulos, J.; Loianno, G.; Kumar, V. IMU-Based Inertia Estimation for a Quadrotor Using Newton-Euler Dynamics. IEEE Robot. Autom. Lett. 2020, 5, 3861–3867. [Google Scholar] [CrossRef]
- Leshikar, C.; Eves, K.; Ninan, N.; Valasek, J. Asymmetric Quadrotor Modeling and State-Space System Identification. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 1422–1431. [Google Scholar] [CrossRef]
- Cortés-Benito, I.; Tlatelpa-Osorio, Y.E.; Martínez-Ramírez, M.; Romero, J.G.; Rodríguez-Cortés, H. Experimental Quadrotor Physical Parameters Estimation. In Proceedings of the 2023 International Conference on Unmanned Aircraft Systems (ICUAS), Warsaw, Poland, 6–9 June 2023; pp. 1356–1362. [Google Scholar] [CrossRef]
- Jeon, H.; Min, J.; Bang, H.; Youn, W. Quaternion-Based Iterative Extended Kalman Filter for Sensor Fusion of Vision Sensor and IMU in 6-DOF Displacement Monitoring. IEEE Sens. J. 2022, 22, 23188–23199. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Units |
|---|---|---|
| m | 4.34 | kg |
| 0.08 | kg· | |
| 0.08 | ||
| 0.14 | ||
| 0.15 | m | |
| 0.15 | m | |
| m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, B.; Liu, B.; Wang, C. Robust Geometric Control for a Quadrotor UAV with Extended Kalman Filter Estimation. Actuators 2024, 13, 205. https://doi.org/10.3390/act13060205
Lei B, Liu B, Wang C. Robust Geometric Control for a Quadrotor UAV with Extended Kalman Filter Estimation. Actuators. 2024; 13(6):205. https://doi.org/10.3390/act13060205
Chicago/Turabian StyleLei, Bo, Bo Liu, and Changhong Wang. 2024. "Robust Geometric Control for a Quadrotor UAV with Extended Kalman Filter Estimation" Actuators 13, no. 6: 205. https://doi.org/10.3390/act13060205
APA StyleLei, B., Liu, B., & Wang, C. (2024). Robust Geometric Control for a Quadrotor UAV with Extended Kalman Filter Estimation. Actuators, 13(6), 205. https://doi.org/10.3390/act13060205