
Design and Optimization of an Active Leveling System Actuator for Lunar Lander Application

 , ,
, ,  ,
, 
Abstract
:1. Introduction
2. Design Methodology
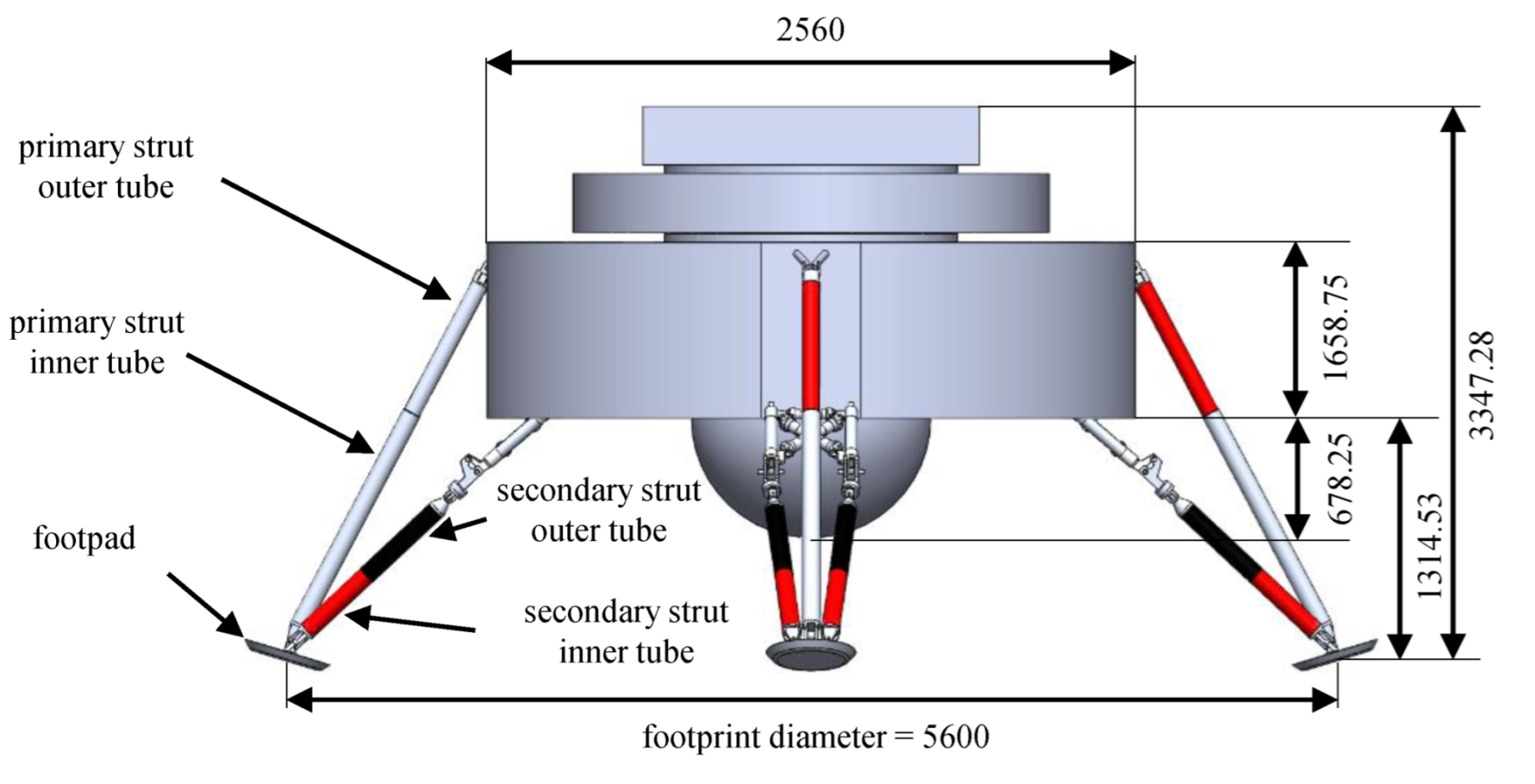
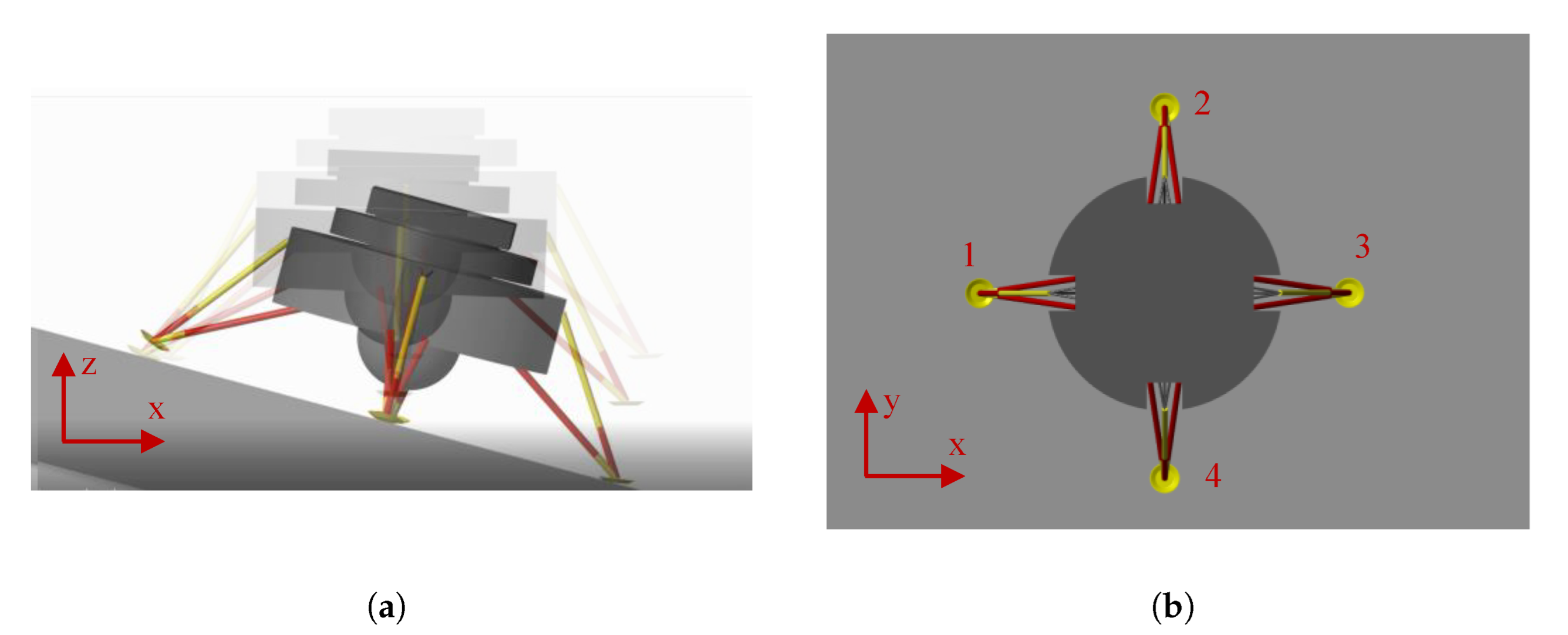
2.1. Landing Gear Layout
- Adequate leveling performances for the required application (in terms of leveling load, operational safety and power consumption);
- Compact size and contained weight (actuator to be fitted within the primary strut tubulars).
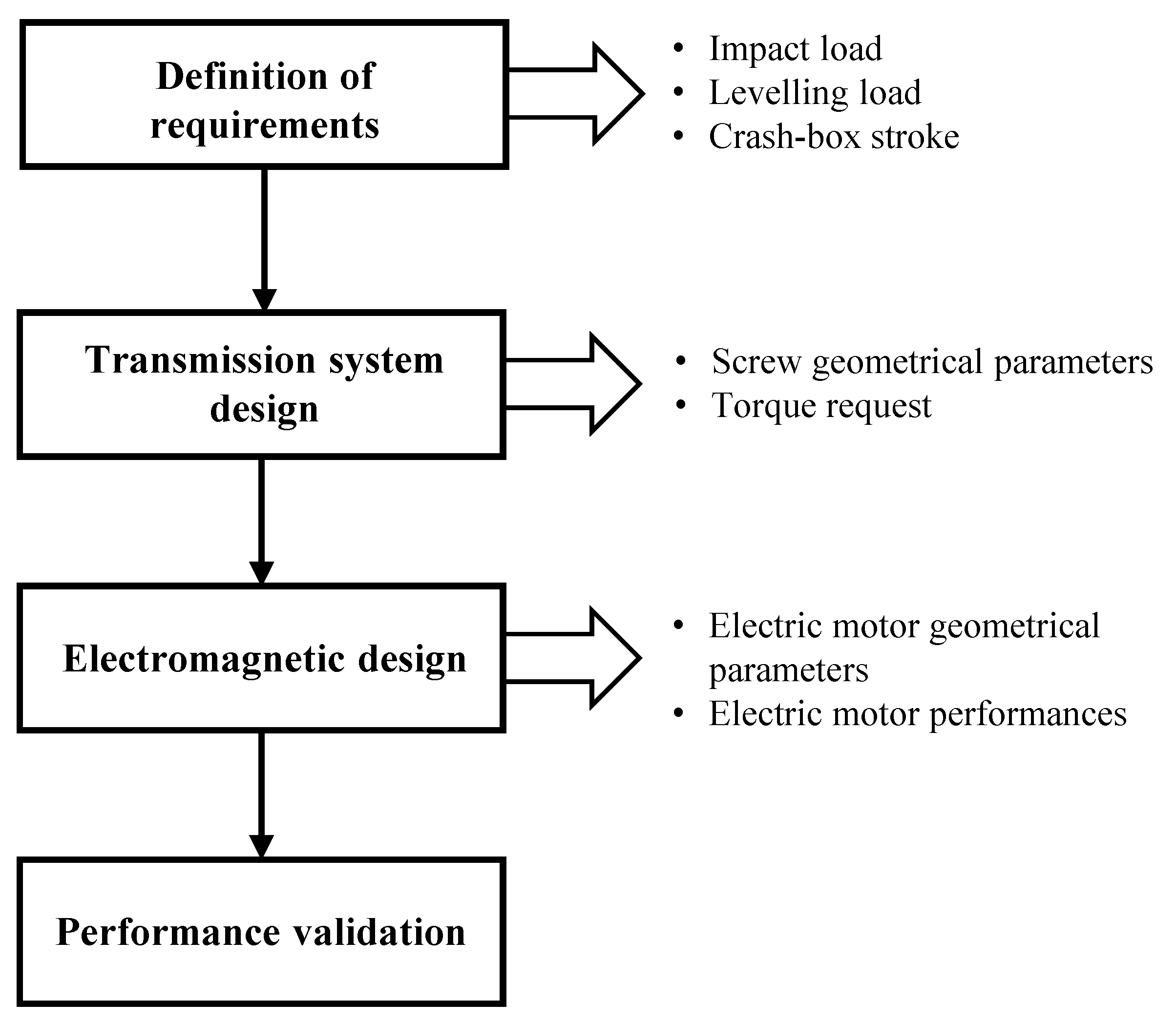
2.2. Actuator Design Methodology
- 1
- Definition of requirements: The force required to lift the load is the first parameter to address. The integrated design starts from the simulation results in terms of impact, leveling load and crash box displacement, which are determined through a parametric multi-body landing model in different lunar scenarios. No constraints on the leveling time were provided in the context of the EL3 lander’s development.
- 2
- Transmission system design: The outputs of the multi-body simulations are used as inputs for a parametric optimization algorithm developed to define the mechanical and geometrical parameters of the transmission system.
- 3
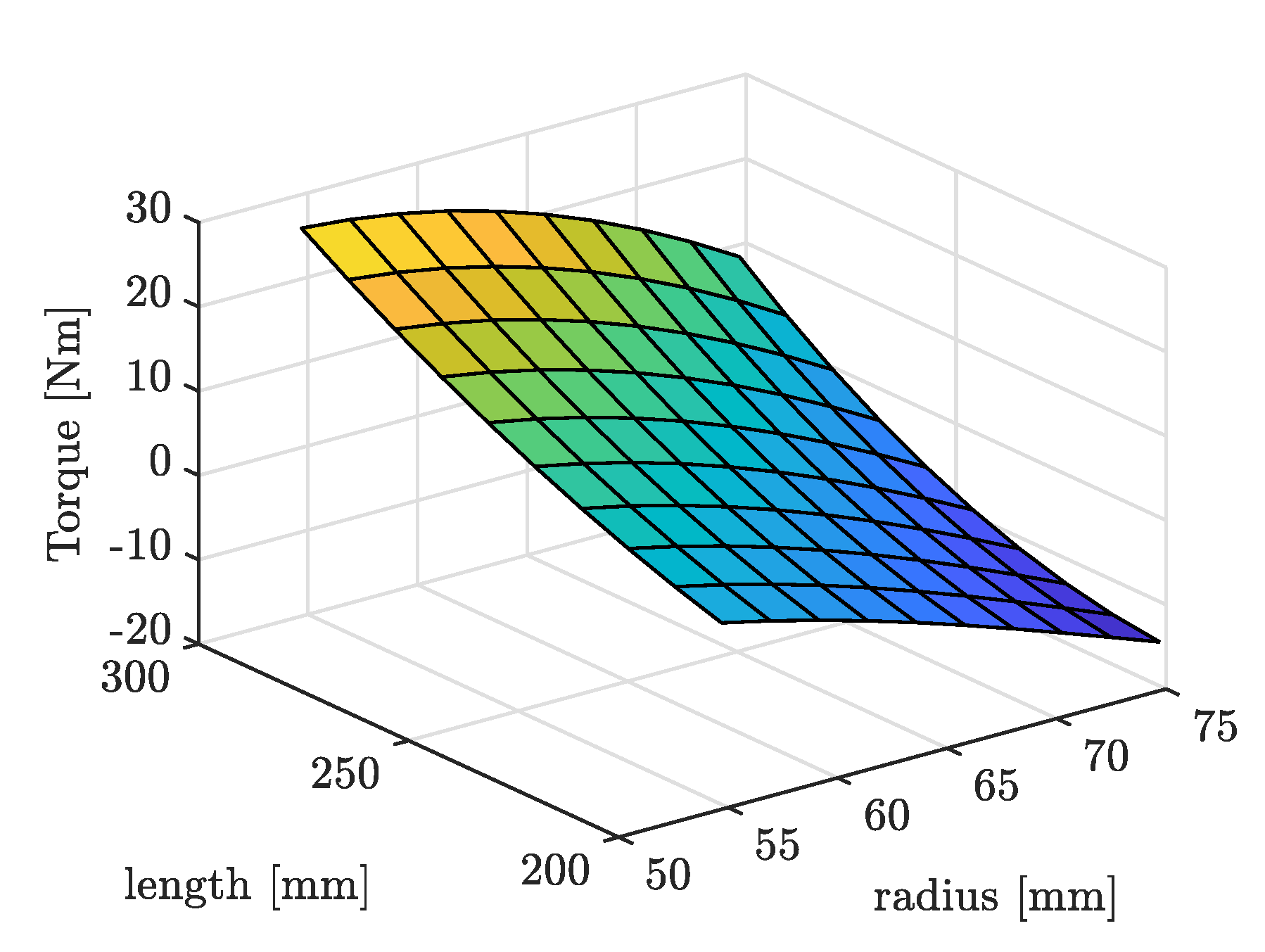
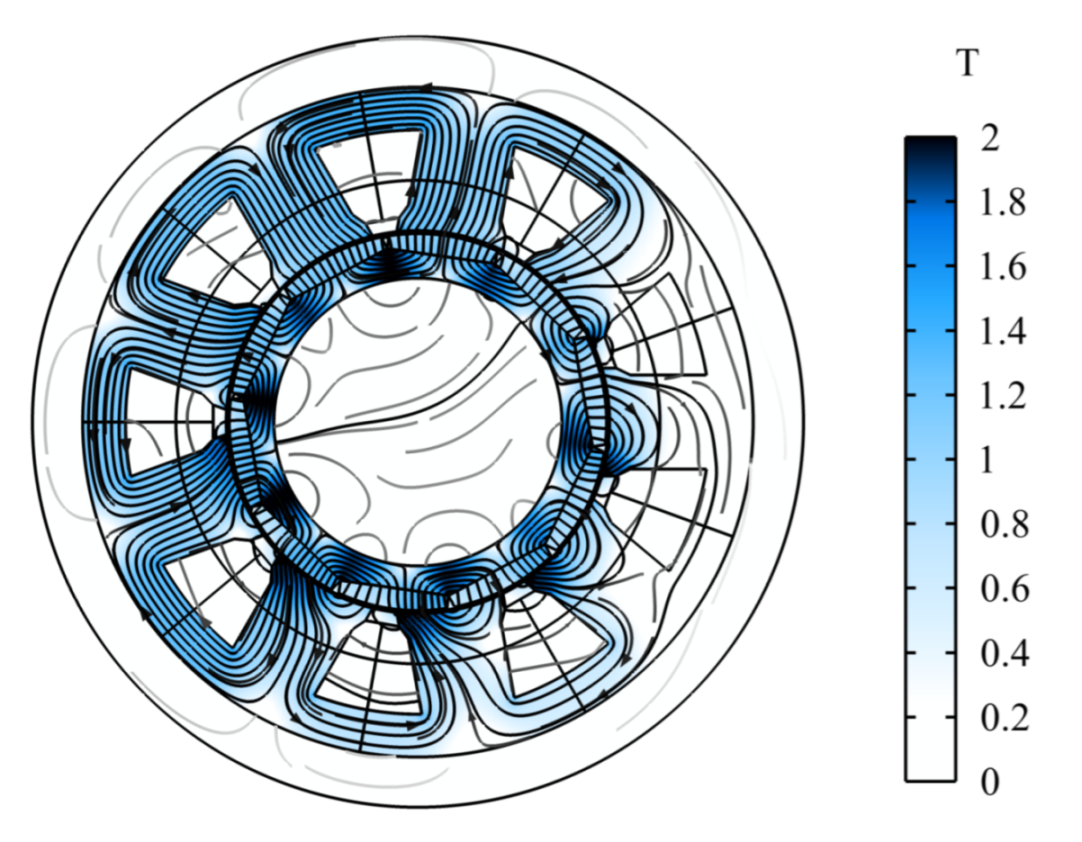
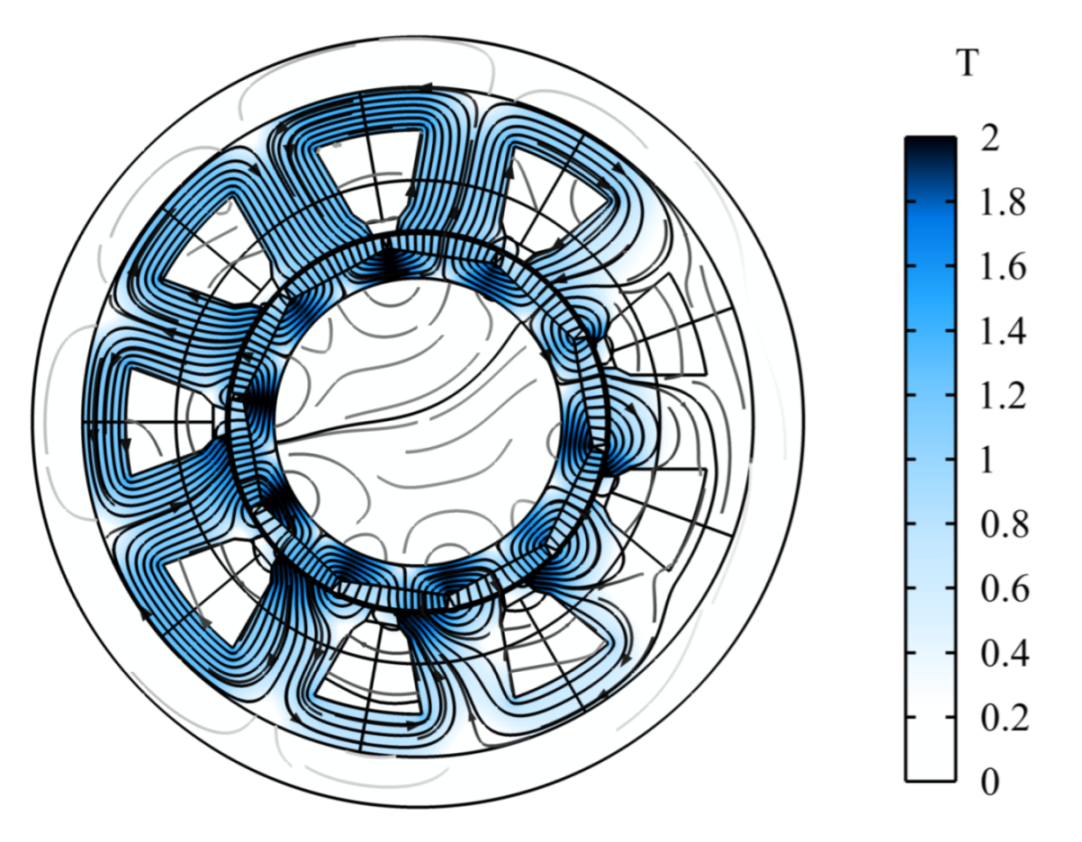
- Electromagnetic design: The required torque and the geometrical constraints of the transmission system are inserted into a parametric optimization algorithm for the electric machine design. This step defines the geometrical and electrical characteristics of the PMSM. Electromagnetic finite element analyses are parametrically performed to define the PMSM performance.
- 4
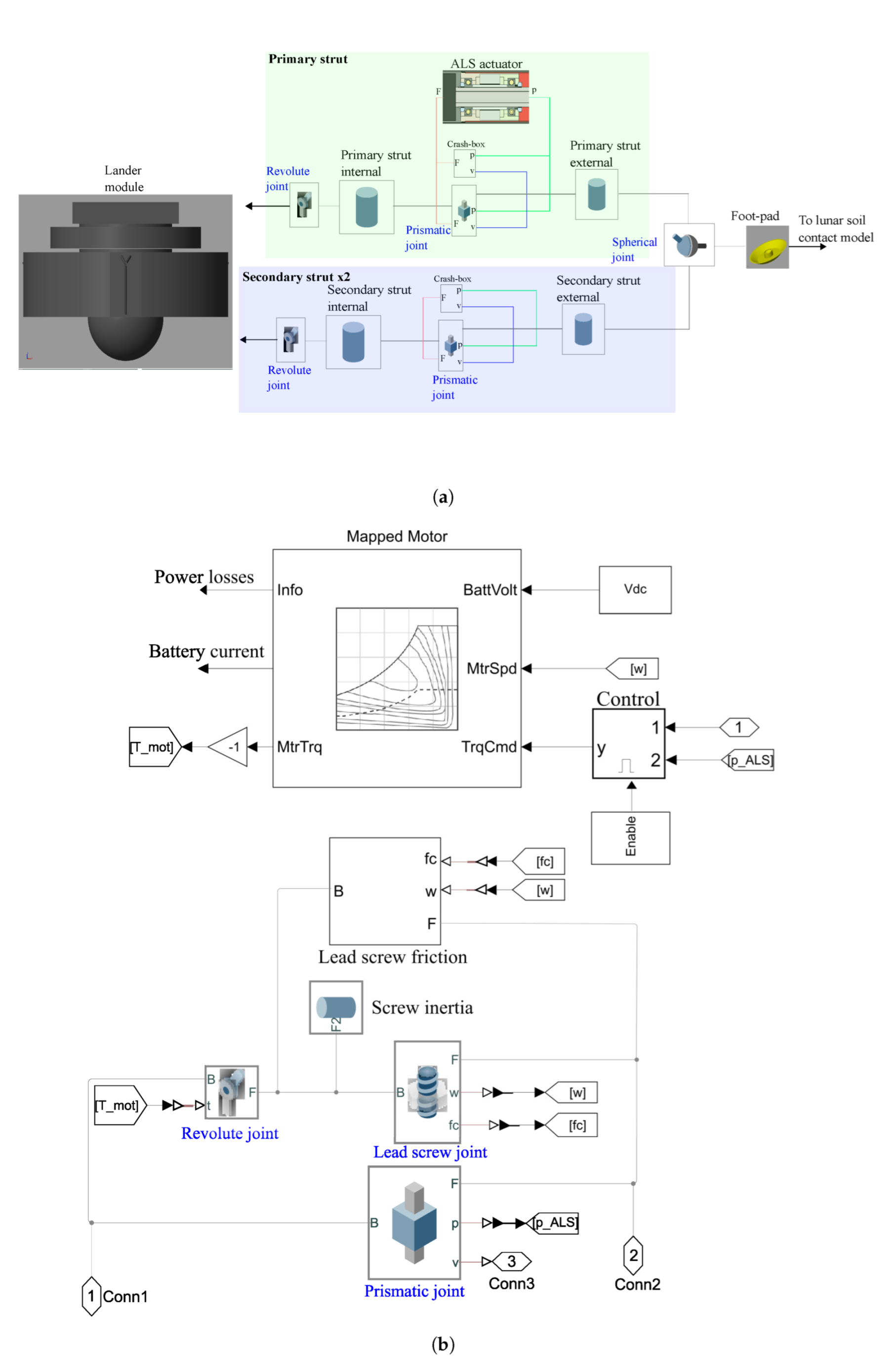
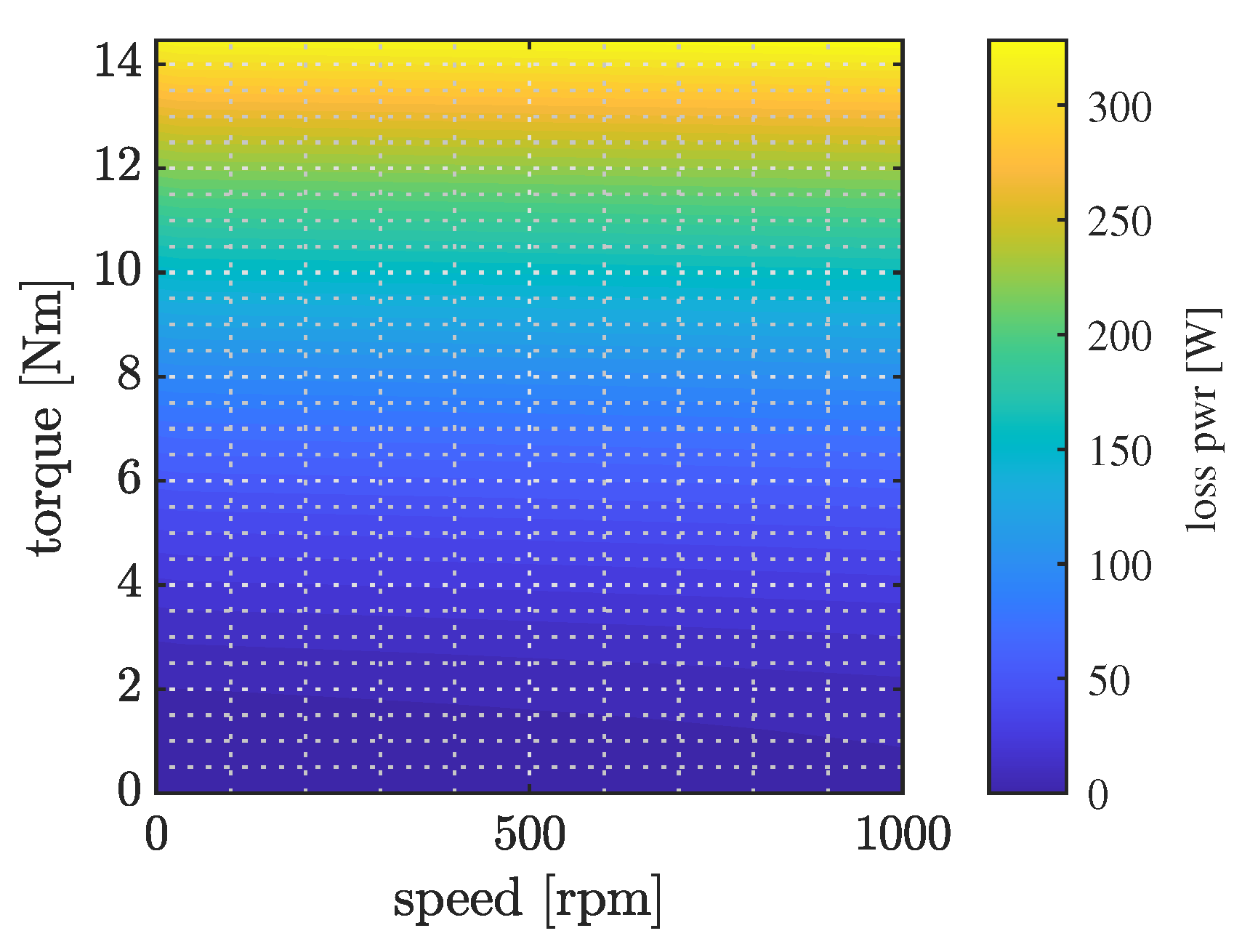
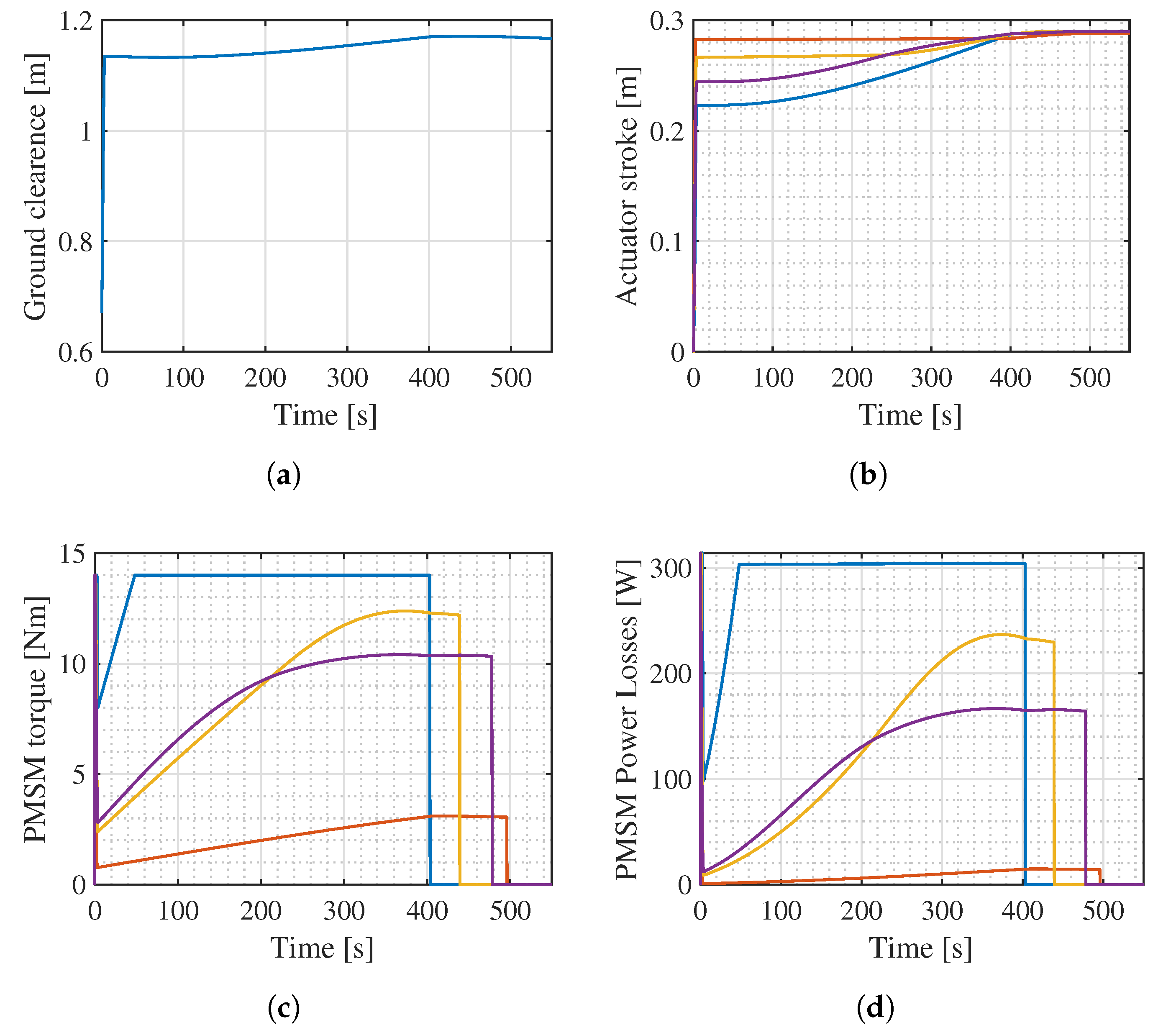
- Performance validation: The overall actuator performances are validated through multi-domain virtual test bench simulations. A complete lander multi-body model, including the electro-mechanical leveling actuator, is developed to validate the proposed design over a reference lunar scenario. The leveling time and electric motor power consumption are the main performance metrics.
3. Case Study
3.1. Requirement Definitions
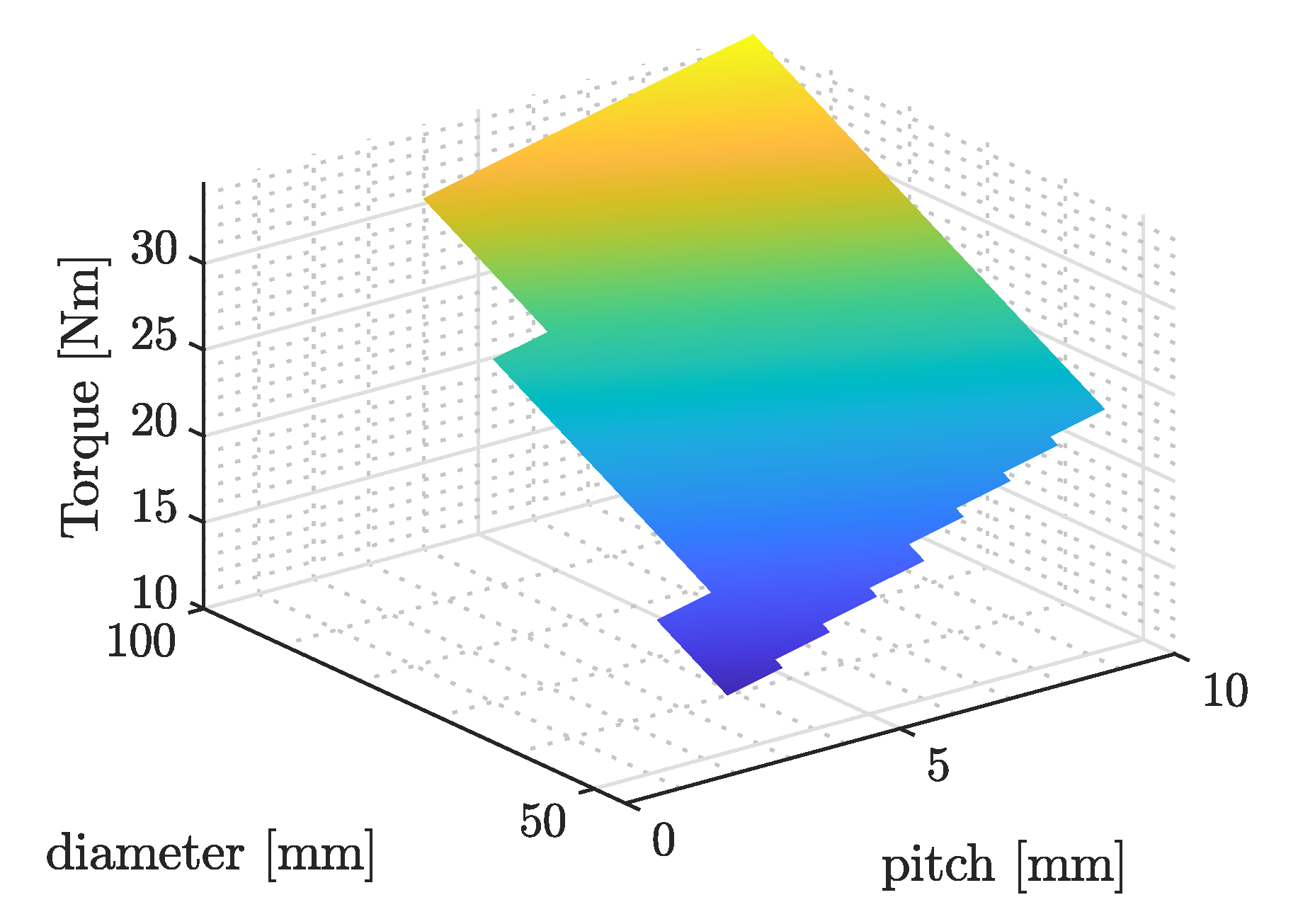
3.2. Transmission System Design
- Irreversibility of the screw profile: ;
- Efficiency: ;
- Mass: ;
- Buckling verification: .
3.3. Electromagnetic Design
4. Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rogers, F.W. Apollo Experience Report—Lunar Module Landing Gear Subsystem; Technical Report; National Aeronautics and Space Administration (NASA): Washington, DC, USA, 1972. [Google Scholar]
- Rew, D.Y.; Ju, G.; Lee, S.; Kim, K.; Kang, S.W.; Lee, S.R. Control system design of the Korean lunar lander demonstrator. Acta Astronaut. 2014, 94, 328–337. [Google Scholar] [CrossRef]
- Ponnusamy, D.; Maahs, G. Development and testing of leg assemblies for robotic lunar lander. In Proceedings of the 14th European Space Mechanisms and Tribology Symposium, Constance, Germany, 28–30 September 2011; pp. 485–492. [Google Scholar]
- Maeda, T.; Ozaki, T.; Hara, S.; Matsui, S. Touchdown Dynamics of Planetary Lander with Translation–Rotation Motion Conversion Mechanism. J. Spacecr. Rocket. 2017, 54, 973–980. [Google Scholar] [CrossRef]
- Lognonné, P.; Banerdt, W.B.; Giardini, D.; Pike, W.T.; Christensen, U.; Laudet, P.; De Raucourt, S.; Zweifel, P.; Calcutt, S.; Bierwirth, M.; et al. SEIS: Insight’s seismic experiment for internal structure of Mars. Space Sci. Rev. 2019, 215, 1–170. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Nie, H.; Chen, J.; Lee, H.P. The design and dynamic analysis of a lunar lander with semi-active control. Acta Astronaut. 2019, 157, 145–156. [Google Scholar] [CrossRef]
- Yin, K.; Gao, F.; Sun, Q.; Liu, J.; Xiao, T.; Yang, J.; Jiang, S.; Chen, X.; Sun, J.; Liu, R.; et al. Design and soft-landing control of a six-legged mobile repetitive lander for lunar exploration. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 670–676. [Google Scholar]
- Rippere, T.B.; Wiens, G.J. An approach to designing passive self-leveling landing gear with application to the Lunar Lander. In Proceedings of the 40th Aerospace Mechanisms Symposium, Cocoa Beach, FL, USA, 12–14 May 2010. [Google Scholar]
- Gollins, N.; Timman, S.; Braun, M.; Landgraf, M. Building a European lunar capability with the European large logistic lander. In Proceedings of the EGU General Assembly Conference Abstracts, Online, 4–8 May 2020; p. 22568. [Google Scholar]
- Bo, L.; Zhang, M.; Hanyu, L.; Hong, N. Optimization design containing dimension and buffer parameters of landing legs for reusable landing vehicle. Chin. J. Aeronaut. 2022, 35, 234–249. [Google Scholar]
- Sciascera, C.; Giangrande, P.; Brunson, C.; Galea, M.; Gerada, C. Optimal design of an electro-mechanical actuator for aerospace application. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 001903–001908. [Google Scholar] [CrossRef]
- Li, W.; Fielding, J. Preliminary study of EMA landing gear actuation. In Proceedings of the 28th International Congress of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012; pp. 23–28. [Google Scholar]
- Budinger, M.; Liscouët, J.; Hospital, F.; Marè, J.C. Estimation models for the preliminary design of electromechanical actuators. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2012, 226, 243–259. [Google Scholar] [CrossRef]
- Budinger, M.; J-C, P.; Gogu, C.; Fraj, A. Scaling-law-based metamodels for the sizing of mechatronic systems. Mechatronics 2014, 24, 775–787. [Google Scholar] [CrossRef]
- Budinger, M.; Reysset, A.; El Halabi, T.; Vasiliu, C.; Marè, J.C. Optimal preliminary design of electromechanical actuators. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 1598–1616. [Google Scholar] [CrossRef]
- ESA. European Large Logistics Lander. Available online: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/European_Large_Logistics_Lander (accessed on 28 April 2022).
- Carpenter, J.; Fisackerly, R.; Espinasse, S. The Lunar Exploration Definition Team. Lunar Exploration Objectives and Requirements Definition; Technical Report; European Space Agency: Paris, France, 2010. [Google Scholar]
- Arm, P.; Zenkl, R.; Barton, P.; Beglinger, L.; Dietsche, A.; Ferrazzini, L.; Hampp, E.; Hinder, J.; Huber, C.; Schaufelberger, D.; et al. Spacebok: A dynamic legged robot for space exploration. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6288–6294. [Google Scholar]
- Amati, N.; Festini, A.; Tonoli, A. Design of electromagnetic shock absorbers for automotive suspensions. Veh. Syst. Dyn. 2011, 49, 1913–1928. [Google Scholar] [CrossRef]
- Hexcell Corp. Hexweb Honeycomb Catalogue. Available online: https://www.hexcel.com/Products/Honeycomb/HexWeb-Honeycomb (accessed on 28 April 2022).
- Liu, Y.; Song, S.; Li, M.; Wang, C. Landing stability analysis for lunar landers using computer simulation experiments. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417748441. [Google Scholar] [CrossRef]
- Pham, V.L.; Zhao, J.; Goo, N.S.; Lim, J.H.; Hwang, D.S.; Park, J.S. Landing stability simulation of a 1/6 lunar module with aluminum honeycomb dampers. Int. J. Aeronaut. Space Sci. 2013, 14, 356–368. [Google Scholar] [CrossRef]
- Zheng, G.; Nie, H.; Chen, J.; Chen, C.; Lee, H.P. Dynamic analysis of lunar lander during soft landing using explicit finite element method. Acta Astronaut. 2018, 148, 69–81. [Google Scholar] [CrossRef]
- Wang, S.C.; Deng, Z.Q.; Hu, M.; Gao, H.B. Dynamic model building and simulation for mechanical main body of lunar lander. J. Cent. South Univ. Technol. 2005, 12, 329–334. [Google Scholar] [CrossRef]
- Hanselmann, D.C. Brushless Permanent Magnet Motor Design. Fac. Staff Monogr. Publ. 2003, 231. [Google Scholar]
- Rapisarda, A.; Amati, N.; Gagliardi, L.; Detoni, J.G.; Galluzzi, R.; Gasparin, E.; Nebiolo, M.; Stitio, A. Design and Experimental Characterization of Electromagnetic Shock Absorbers for Landing Gears. In Proceedings of the International Astronautical Congress: IAC Proceedings, Naples, Italy, 1–5 October 2012. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value |
|---|---|---|
| Material density (steel) | ||
| E | Material Young’s modulus | 206 GPa |
| f | Dynamic friction coefficient | |
| Thread angle | 30 deg | |
| Leveling load | 5300 N | |
| Landing impact load | 15,000 N | |
| S | Safety factor | 2 |
| l | Length | 1320 mm |
| Symbol | Description | Value |
|---|---|---|
| Vertical landing speed | m/s | |
| Horizontal landing speed | m/s | |
| Lunar terrain slope | 15 deg | |
| Static friction coefficient | ||
| Dynamic friction coefficient | ||
| k | Contact stiffness | N/m |
| c | Contact damping | Ns/m |
| Symbol | Description | Value |
|---|---|---|
| d | Nominal diameter | 47 mm |
| p | Pitch | 2 mm |
| Inner diameter | mm | |
| Nut diameter | 45 mm | |
| T | Torque | Nm |
| Efficiency | ||
| m | Mass estimate | 6 kg |
| Symbol | Description | Value |
|---|---|---|
| Rotor inside radius | mm | |
| Rotor outside radius | mm | |
| Stator inside radius | mm | |
| Stator inside radius | 55 mm | |
| g | Air gap length | mm |
| Back iron width | 7 mm | |
| Slot opening | 4 mm | |
| PMSM axial length | 200 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manca, R.; Puliti, M.; Circosta, S.; Galluzzi, R.; Salvatore, S.; Amati, N. Design and Optimization of an Active Leveling System Actuator for Lunar Lander Application. Actuators 2022, 11, 263. https://doi.org/10.3390/act11090263
Manca R, Puliti M, Circosta S, Galluzzi R, Salvatore S, Amati N. Design and Optimization of an Active Leveling System Actuator for Lunar Lander Application. Actuators. 2022; 11(9):263. https://doi.org/10.3390/act11090263
Chicago/Turabian StyleManca, Raffaele, Marco Puliti, Salvatore Circosta, Renato Galluzzi, Sergio Salvatore, and Nicola Amati. 2022. "Design and Optimization of an Active Leveling System Actuator for Lunar Lander Application" Actuators 11, no. 9: 263. https://doi.org/10.3390/act11090263
APA StyleManca, R., Puliti, M., Circosta, S., Galluzzi, R., Salvatore, S., & Amati, N. (2022). Design and Optimization of an Active Leveling System Actuator for Lunar Lander Application. Actuators, 11(9), 263. https://doi.org/10.3390/act11090263